You might also like
- The Loss Factor As Measure Mechanical Damping PDFDocument5 pagesThe Loss Factor As Measure Mechanical Damping PDFsalvatorgabriele100% (1)
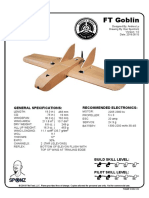
- FT Goblin Full SizeDocument7 pagesFT Goblin Full SizeDeakon Frost100% (1)
- Understanding How Components FailDocument2 pagesUnderstanding How Components Failsivamett100% (1)
- PDFDocument49 pagesPDFHardik KalasuaNo ratings yet
- Delamination Analysis of Composites Using A Finite Element Based Discrete Damage Zone ModelDocument15 pagesDelamination Analysis of Composites Using A Finite Element Based Discrete Damage Zone ModeldimasNo ratings yet
- Manuscript Conferencey Final PDFDocument9 pagesManuscript Conferencey Final PDFKariim DiíbNo ratings yet
- Song Auc2008Document15 pagesSong Auc2008klomps_jrNo ratings yet
- Theoretical and Applied Fracture Mechanics: SciencedirectDocument10 pagesTheoretical and Applied Fracture Mechanics: SciencedirectDevan1984No ratings yet
- Verhoosel2013 A Phase Field Model For Cohesive FractureDocument20 pagesVerhoosel2013 A Phase Field Model For Cohesive FractureFeiyang WangNo ratings yet
- Shear Band Formation in Granular Materials: A Micromechanical ApproachDocument7 pagesShear Band Formation in Granular Materials: A Micromechanical ApproachgeoanagoNo ratings yet
- Pro076 010Document9 pagesPro076 010Emanuel GevaraNo ratings yet
- Carpinteri 2006 N.408 EfmDocument13 pagesCarpinteri 2006 N.408 Efmlopollo1000No ratings yet
- Determination of The J IntegralDocument15 pagesDetermination of The J IntegralJamalNo ratings yet
- Elastoplastic-Damage Modelling Including The Gradient of Damage Formulation and Computational AspectsDocument31 pagesElastoplastic-Damage Modelling Including The Gradient of Damage Formulation and Computational Aspectsking sunNo ratings yet
- CH-#3 Fracture Mechanics PEFMDocument35 pagesCH-#3 Fracture Mechanics PEFMhaftamuNo ratings yet
- A 3D Shear-Lag Model Considering Micro-Damage and Statistical Strength Prediction of Unidirectional Fiber-Reinforced CompositesDocument15 pagesA 3D Shear-Lag Model Considering Micro-Damage and Statistical Strength Prediction of Unidirectional Fiber-Reinforced CompositesDavid AcostaNo ratings yet
- Analysis of Finite Element Mesh Spacing Influence On Modeling ResultsDocument4 pagesAnalysis of Finite Element Mesh Spacing Influence On Modeling ResultsGlobal Journal of Engineering and Scientific ResearchNo ratings yet
- Radmi 2009: Research and Development in Mechanical IndustryDocument6 pagesRadmi 2009: Research and Development in Mechanical IndustrySnezana VulovicNo ratings yet
- J. N. Reddy - 2022 - Tridynamic Model of The Beam With Transverse Shear DeformationDocument20 pagesJ. N. Reddy - 2022 - Tridynamic Model of The Beam With Transverse Shear DeformationSevim GüçlüNo ratings yet
- Damage Mechanisms and Local Approach To FractureDocument14 pagesDamage Mechanisms and Local Approach To Fractureamd mhmNo ratings yet
- 10 4028@www Scientific Net@msf 482 303Document5 pages10 4028@www Scientific Net@msf 482 303CoNo ratings yet
- 11 CT 2 - 2019Document11 pages11 CT 2 - 2019Miguel FernándezNo ratings yet
- Dynamic Mesh Refining and Iterative SubstructureDocument16 pagesDynamic Mesh Refining and Iterative Substructuremoe chenNo ratings yet
- Efficient Implementation of Superquadric Particles in DiscreteDocument18 pagesEfficient Implementation of Superquadric Particles in DiscretedavidusachNo ratings yet
- Convergence-Confinement Method For Simulating NATM Tunnels Evaluated by Comparison With Full 3D SimulationsDocument7 pagesConvergence-Confinement Method For Simulating NATM Tunnels Evaluated by Comparison With Full 3D SimulationstpgggkNo ratings yet
- Reconstruction of A Fracture Process Zone During Tensile Failure of Quasi-Brittle MaterialsDocument14 pagesReconstruction of A Fracture Process Zone During Tensile Failure of Quasi-Brittle MaterialsGabriel PatrunoNo ratings yet
- 3D Analysis of Failure Modes in The Charpy Impact TestDocument21 pages3D Analysis of Failure Modes in The Charpy Impact TestEdna Odette Melo UscangaNo ratings yet
- Subroutine For Cohesive ElementDocument41 pagesSubroutine For Cohesive ElementBhushanRaj100% (1)
- Adaptive DKT Finite Element For Plate Bending Analysis of Built-Up StructuresDocument9 pagesAdaptive DKT Finite Element For Plate Bending Analysis of Built-Up Structuresalucard draculaNo ratings yet
- Predictive Modelling of Coal FlowDocument8 pagesPredictive Modelling of Coal FlowBrianNo ratings yet
- An Isogeometric Approach To Cohesive ZonDocument31 pagesAn Isogeometric Approach To Cohesive ZongrygoriiNo ratings yet
- Quadrature Rules For Isogeometric Shell Formulations: Study Using A Real-World Application About Metal FormingDocument16 pagesQuadrature Rules For Isogeometric Shell Formulations: Study Using A Real-World Application About Metal FormingJorge Luis Garcia ZuñigaNo ratings yet
- Simulation of Damage and Crack Propagation in Three-Point Bending Asphalt Concrete Beam Guowei Zeng, Xinhua Yang, Fan Bai Anyi YinDocument9 pagesSimulation of Damage and Crack Propagation in Three-Point Bending Asphalt Concrete Beam Guowei Zeng, Xinhua Yang, Fan Bai Anyi YinKiplgat ChelelgoNo ratings yet
- 01 Tsuda ItochuTechno Solutions PDocument10 pages01 Tsuda ItochuTechno Solutions Pاحمد تسنیمNo ratings yet
- EPFM - Elasto Plastic Fracture MechanicsDocument11 pagesEPFM - Elasto Plastic Fracture MechanicsSaima naazNo ratings yet
- A 3-D Finite Element For Laminated Composites With 2-D Kinematic ConstraintstDocument9 pagesA 3-D Finite Element For Laminated Composites With 2-D Kinematic ConstraintstFerNo ratings yet
- Proceeding 2021Document10 pagesProceeding 2021Dang Son TungNo ratings yet
- 2015 Eve RcsalesDocument7 pages2015 Eve Rcsalesgate44No ratings yet
- Sheet - Ansys, SpringbackDocument9 pagesSheet - Ansys, Springbacksupersonny007No ratings yet
- Discrete Crack Modeling in Concrete StructuresDocument16 pagesDiscrete Crack Modeling in Concrete StructuresjahidNo ratings yet
- Detecting Open Craks Inside Beams Using The BEM and Wavelet TransformDocument9 pagesDetecting Open Craks Inside Beams Using The BEM and Wavelet TransformTese ramonNo ratings yet
- 2004 Pina Lourenco1 PDFDocument18 pages2004 Pina Lourenco1 PDFKevin HuamaniNo ratings yet
- 14 Material ModelingDocument12 pages14 Material ModelingVicente Bergamini PugliaNo ratings yet
- Da DN Test5Document8 pagesDa DN Test5Anjan GhoshNo ratings yet
- Modeling of Lamb Waves in Composites Using New Third-Order Plate TheoriesDocument15 pagesModeling of Lamb Waves in Composites Using New Third-Order Plate TheoriesesatecNo ratings yet
- 03 ER Vukelic Format PDFDocument6 pages03 ER Vukelic Format PDFavenashaNo ratings yet
- Engineering20101100005 44076873Document13 pagesEngineering20101100005 44076873Abdalla Mohamed AbdallaNo ratings yet
- C Und All Alert School LectureDocument21 pagesC Und All Alert School Lecturejmhs31No ratings yet
- Skin-Stringer Debonding and Delamination Analysis in Composite Stiffened ShellsDocument6 pagesSkin-Stringer Debonding and Delamination Analysis in Composite Stiffened ShellsGopan KrishnanNo ratings yet
- Numerical Strip-Yield Calculation of CTOD and CTOA: NASA Johnson Space Center, Houston, TX, 77058Document13 pagesNumerical Strip-Yield Calculation of CTOD and CTOA: NASA Johnson Space Center, Houston, TX, 77058pouya_msNo ratings yet
- Gance Et AlDocument6 pagesGance Et AlkouppatatNo ratings yet
- 02 1995 Zh&Mackie&Mad GeophDocument13 pages02 1995 Zh&Mackie&Mad GeophgpsglonassNo ratings yet
- Fracture Analysis of Adhesive Joints Using Intrinsic Cohesive Zone ModelsDocument8 pagesFracture Analysis of Adhesive Joints Using Intrinsic Cohesive Zone ModelsMin-Sung KimNo ratings yet
- 10.1016 J.crme.2017.02.005 Fatigue Crack Growth Simulation in Coated Materials Using X FEMDocument10 pages10.1016 J.crme.2017.02.005 Fatigue Crack Growth Simulation in Coated Materials Using X FEMhamid rezaNo ratings yet
- Rcwa 1Document5 pagesRcwa 1Ovoi AronnoNo ratings yet
- Computational Models For Mode I Composite Fracture Failure: The Virtual Crack Closure Technique Versus The Two-Step Extension MethodDocument8 pagesComputational Models For Mode I Composite Fracture Failure: The Virtual Crack Closure Technique Versus The Two-Step Extension MethodVictor Daniel WaasNo ratings yet
- Penalty Function Method For Combined Ÿnite-Discrete Element Systems Comprising Large Number of Separate BodiesDocument20 pagesPenalty Function Method For Combined Ÿnite-Discrete Element Systems Comprising Large Number of Separate Bodiesjohn12No ratings yet
- Icmsm 2006 PDFDocument27 pagesIcmsm 2006 PDFJuan Carlos Torres HernándezNo ratings yet
- Advanced Signal Processing Algorithms in Structural Integrity Monitoring 2014 Procedia EngineeringDocument13 pagesAdvanced Signal Processing Algorithms in Structural Integrity Monitoring 2014 Procedia EngineeringalkhiatNo ratings yet
- A Fast Method For Calculation of Transformers Leakage Reactance Using Energy TechniqueDocument8 pagesA Fast Method For Calculation of Transformers Leakage Reactance Using Energy TechniqueGame MiNo ratings yet
- Coupled CFD-DEM Modeling: Formulation, Implementation and Application to Multiphase FlowsFrom EverandCoupled CFD-DEM Modeling: Formulation, Implementation and Application to Multiphase FlowsNo ratings yet
- Dynamic Damage and FragmentationFrom EverandDynamic Damage and FragmentationDavid Edward LambertNo ratings yet
- Journal Metrics 2017Document2 pagesJournal Metrics 2017yagebu88No ratings yet
- Arma2015 000311 PDFDocument6 pagesArma2015 000311 PDFyagebu88No ratings yet
- ComputationalParticleMechanics AnisotropicMaterialPaper Watermarked PDFDocument22 pagesComputationalParticleMechanics AnisotropicMaterialPaper Watermarked PDFyagebu88No ratings yet
- EC CompositeTetrahedronPaper ResearchGate AsSent1 PDFDocument25 pagesEC CompositeTetrahedronPaper ResearchGate AsSent1 PDFyagebu88No ratings yet
- Multi-Core Strategies For Particle Me: John R. Williams, David Holmes and Peter TilkeDocument7 pagesMulti-Core Strategies For Particle Me: John R. Williams, David Holmes and Peter Tilkeyagebu88No ratings yet
- Amphenol RET H6133100Document5 pagesAmphenol RET H6133100cristigoNo ratings yet
- Professional Growth Plan Student TeachingDocument3 pagesProfessional Growth Plan Student Teachingapi-315324639No ratings yet
- Ieee STDDocument22 pagesIeee STDBalaji SpNo ratings yet
- LM380 2.5W Audio Power Amplifier: Features DescriptionDocument14 pagesLM380 2.5W Audio Power Amplifier: Features DescriptionVicenteAlvarezNo ratings yet
- Microwave Transmission OverviewDocument12 pagesMicrowave Transmission OverviewJunaid MuidynNo ratings yet
- Donaldson Pf-Eg Filter Housing. Process FluidDocument3 pagesDonaldson Pf-Eg Filter Housing. Process FluidluisNo ratings yet
- Impact of Digital Cameras On FashionDocument3 pagesImpact of Digital Cameras On FashionArpita SahaNo ratings yet
- RTI Engg 020817Document5 pagesRTI Engg 020817Amit GaragNo ratings yet
- Inrd Pe13002 60049PDocument366 pagesInrd Pe13002 60049PJose Juan DavilaNo ratings yet
- ArgueCard IVR-L 100-30 PDFDocument2 pagesArgueCard IVR-L 100-30 PDFPulse XNo ratings yet
- Python MCQDocument13 pagesPython MCQSanjay Jain33% (3)
- Whitepaper Wolfs Group OU - ENDocument43 pagesWhitepaper Wolfs Group OU - ENRicky PerdanaNo ratings yet
- Spaceships of Science FictionDocument116 pagesSpaceships of Science FictionBruce Lee100% (13)
- Lesson 23: Partnership With Local Communities and OrganizationsDocument19 pagesLesson 23: Partnership With Local Communities and OrganizationsNica de PazNo ratings yet
- WaltonDocument4 pagesWaltonAshikur RahmanNo ratings yet
- SImple NPS Configuration As Radius Part 1 PDFDocument39 pagesSImple NPS Configuration As Radius Part 1 PDFBlueilNo ratings yet
- Zomato Food Order: Summary and Receipt: Item Quantity Unit Price Total PriceDocument2 pagesZomato Food Order: Summary and Receipt: Item Quantity Unit Price Total PriceBhoomikaNo ratings yet
- Determinining Gas Blowby RequirementsDocument1 pageDeterminining Gas Blowby RequirementsMehdi QuazilbashNo ratings yet
- Steam TurbinesDocument14 pagesSteam TurbinesArvindPasuparthyNo ratings yet
- Google People Operations - The Secrets of The World's Most Scientific Human Resources DepartmentDocument3 pagesGoogle People Operations - The Secrets of The World's Most Scientific Human Resources DepartmentAtul KohliNo ratings yet
- Constituent CommentDocument12 pagesConstituent CommentPressCitizen100% (1)
- Asmax PDFDocument25 pagesAsmax PDFJorge GavidiaNo ratings yet
- Giro Form For Utilities ACC1006 ProjectDocument2 pagesGiro Form For Utilities ACC1006 ProjectrachmmmNo ratings yet
- Oracle - Financials Cloud - Implementing Payables Invoice To Pay, R10 (E61401-01) (FAIPP)Document230 pagesOracle - Financials Cloud - Implementing Payables Invoice To Pay, R10 (E61401-01) (FAIPP)Jose LaraNo ratings yet
- Study of VMC, CMC and SM Control of Buck Converter: Mahesh Gowda N M, Dr. S. S. ParthasarathyDocument6 pagesStudy of VMC, CMC and SM Control of Buck Converter: Mahesh Gowda N M, Dr. S. S. Parthasarathykotakonda chakravarthiNo ratings yet
- Application Form PreviewDocument1 pageApplication Form Previewvishal rathiNo ratings yet
- C & S Product Catalouge PDFDocument113 pagesC & S Product Catalouge PDFvipulpanchotiyaNo ratings yet