You might also like
- Cap Screws: Sae J429 Grade IdentificationDocument6 pagesCap Screws: Sae J429 Grade IdentificationHomer SilvaNo ratings yet
- ElectronicSources ComponentsDocument130 pagesElectronicSources ComponentsHenry ChanNo ratings yet
- Switching Power Supply Design: A Concise Practical Handbook: February 2022Document5 pagesSwitching Power Supply Design: A Concise Practical Handbook: February 2022Juan Gil RocaNo ratings yet
- GE Power Conversion. T1679EN Software Manual Rev MV3000e Drive Range. Basic Drive Modules, Air-Cooled & Liquid CooledDocument446 pagesGE Power Conversion. T1679EN Software Manual Rev MV3000e Drive Range. Basic Drive Modules, Air-Cooled & Liquid CooledEvandro PavesiNo ratings yet
- Class 13 - Mathematical Modeling of Thermal SystemDocument15 pagesClass 13 - Mathematical Modeling of Thermal Systemapi-2667661650% (2)
- Design of Roof TrussesDocument24 pagesDesign of Roof TrussesAlam Mohammad Parvez Saifi69% (16)
- Automatic Street Light Using LDRDocument16 pagesAutomatic Street Light Using LDRRohan KandekarNo ratings yet
- Compiled Questions in Mathematics Moodle PDF FreeDocument875 pagesCompiled Questions in Mathematics Moodle PDF FreeJay Mark CayonteNo ratings yet
- Hb860h ManualDocument6 pagesHb860h ManualBayron Ospina MarinNo ratings yet
- 02 Resource Accounting For Sustainability Assessment - The NexuDocument271 pages02 Resource Accounting For Sustainability Assessment - The NexuАдъяабатын АмарбаярNo ratings yet
- Conexion Motor Pap PDFDocument70 pagesConexion Motor Pap PDFKaterine FreireNo ratings yet
- HBS86 HDDocument7 pagesHBS86 HDLuis Flores0% (1)
- MD2278 DDocument3 pagesMD2278 Dhoangmanh1989No ratings yet
- Level Past Paper Questions - Hysics O P: TOPIC-8 Heat Capacity PAPER-1 Multiple ChoiceDocument3 pagesLevel Past Paper Questions - Hysics O P: TOPIC-8 Heat Capacity PAPER-1 Multiple Choiceelty Tan50% (2)
- Lighting & Acoustic Performance Evaluation and DesignDocument123 pagesLighting & Acoustic Performance Evaluation and DesignTsaiWanChing100% (1)
- Unity and MySQLDocument30 pagesUnity and MySQLRobertoBrNo ratings yet
- 8×8 LED Matrix MAX7219 With Scrolling Text & Android Control Via BluetoothDocument15 pages8×8 LED Matrix MAX7219 With Scrolling Text & Android Control Via BluetoothakashlogicNo ratings yet
- Colibri Carrier Board Design GuideDocument47 pagesColibri Carrier Board Design GuideshahbazNo ratings yet
- Arduino Servo Motor Control Tutorial PDFDocument1 pageArduino Servo Motor Control Tutorial PDFpicatilio100% (2)
- PG 2021 Financial StatementsDocument6 pagesPG 2021 Financial StatementsCamille E. CamtuganNo ratings yet
- Synapse Getting Started ManualDocument14 pagesSynapse Getting Started Manuals3nkioNo ratings yet
- MGate MB3180 3280 3480Document2 pagesMGate MB3180 3280 3480elson brito juniorNo ratings yet
- Manual 797 VA Computrace SoftwareDocument295 pagesManual 797 VA Computrace Softwarechaouch molkaNo ratings yet
- Dokumen - Tips 8085 Microprocessor Training Kit Users Manual Wwwkswichitcommtk 85usermanual3pdfpdfDocument116 pagesDokumen - Tips 8085 Microprocessor Training Kit Users Manual Wwwkswichitcommtk 85usermanual3pdfpdfDexember SnowNo ratings yet
- Sharp Solar NA E120G5 NA E125G5 NA E130G5 NA E135G5glass Glass EU Vico E...Document4 pagesSharp Solar NA E120G5 NA E125G5 NA E130G5 NA E135G5glass Glass EU Vico E...I-Simion GNo ratings yet
- 17mb130 Service ManualDocument63 pages17mb130 Service ManualHolka PulkaNo ratings yet
- Alcatel MDP-5010 Turbo Drag Pump ManualDocument28 pagesAlcatel MDP-5010 Turbo Drag Pump ManualAmir SohailNo ratings yet
- OpenFrame Base 7 Fix#3 TSAM Guide v2.1.4 enDocument80 pagesOpenFrame Base 7 Fix#3 TSAM Guide v2.1.4 enborisg3No ratings yet
- Hampleton Partners Fintech Report 1H2020 FINALDocument12 pagesHampleton Partners Fintech Report 1H2020 FINALPrabha GuptaNo ratings yet
- Advanced View Pic Microcontroller Projects List - PIC MicrocontrollerDocument206 pagesAdvanced View Pic Microcontroller Projects List - PIC MicrocontrollerBilal AfzalNo ratings yet
- Esp32 Iot Development Trainer KitDocument6 pagesEsp32 Iot Development Trainer KitRijul PragatheeshNo ratings yet
- 2.9.2 Lab - Basic Switch and End Device ConfigurationDocument3 pages2.9.2 Lab - Basic Switch and End Device ConfigurationjhonNo ratings yet
- DB2 Web Query For I The Nuts and BoltsDocument224 pagesDB2 Web Query For I The Nuts and BoltsNicolás TrepinNo ratings yet
- Creating PDS STRESS Model AutoPIPE1Document33 pagesCreating PDS STRESS Model AutoPIPE1Luis OrtizNo ratings yet
- Msi Gp63 Leopard 8re Ms-16p5 - ms-17c5 Rev 0aDocument84 pagesMsi Gp63 Leopard 8re Ms-16p5 - ms-17c5 Rev 0aPavel RostovtsevNo ratings yet
- Esp32 Devkit 4Document9 pagesEsp32 Devkit 4Idin FahrudinNo ratings yet
- Quanta FH9 DA0FH9MB6C0 - R2aDocument48 pagesQuanta FH9 DA0FH9MB6C0 - R2aYetawa GuaviareNo ratings yet
- Writing C Code For The 8051Document52 pagesWriting C Code For The 8051BHUSHANNo ratings yet
- Machinist 4 TH Semester CTSDocument26 pagesMachinist 4 TH Semester CTSQuality HosurNo ratings yet
- Participant V2.2 Change Management GuideDocument85 pagesParticipant V2.2 Change Management Guideziaur060382100% (1)
- H3U FL EN Spreads Web V3.5Document3 pagesH3U FL EN Spreads Web V3.5ShaileshNo ratings yet
- DocumentDocument29 pagesDocumentLuffy ZoroNo ratings yet
- HDS DF800 Maintenance ManualDocument26 pagesHDS DF800 Maintenance Manualulrik engellNo ratings yet
- Variable Frequency Vibrators Controlled Through Rotary Switches With Connection ExtractableDocument16 pagesVariable Frequency Vibrators Controlled Through Rotary Switches With Connection ExtractableLucy HernandezNo ratings yet
- Axpert VM IV 3.6-5.6Kw Manual 20210415 ENDocument71 pagesAxpert VM IV 3.6-5.6Kw Manual 20210415 ENTirszin0% (1)
- Machine Learning For Enterprises: Applications, Algorithm Selection, and ChallengesDocument14 pagesMachine Learning For Enterprises: Applications, Algorithm Selection, and ChallengesMoncef ChorfiNo ratings yet
- 2018 BMW x2 25Document312 pages2018 BMW x2 25Mario MarioNo ratings yet
- GovernorDocument10 pagesGovernorPltm Pesantren 1100% (1)
- MAS Intro To MoviconNExTDocument31 pagesMAS Intro To MoviconNExTvoicedont dieNo ratings yet
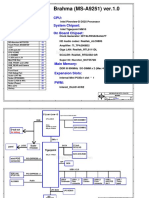
- Ms-A9251 Rev1.0Document34 pagesMs-A9251 Rev1.0Vivek VarshneyNo ratings yet
- Manual TerraqueDocument290 pagesManual TerraqueFrancisco Garcia PraxedesNo ratings yet
- Arduino - Servo MotorDocument3 pagesArduino - Servo Motorꀸꃅꋪꀎᐯ KumarNo ratings yet
- Electronic Basics #25: Servos and How To Use Them: Servo MotorDocument13 pagesElectronic Basics #25: Servos and How To Use Them: Servo MotorToàn HerreraNo ratings yet
- ENGG 200 Introduction To Engineering: Servo MotorDocument13 pagesENGG 200 Introduction To Engineering: Servo MotorReda FakihNo ratings yet
- 1-Servo Motor Control Using ArduinoDocument12 pages1-Servo Motor Control Using Arduinosebas.lopez1202No ratings yet
- LAB 2-AngeladaDocument20 pagesLAB 2-AngeladaAlehamarie AngeladaNo ratings yet
- Project 8 Servo MotorsDocument4 pagesProject 8 Servo MotorsDarwin VargasNo ratings yet
- Watcha 4Document2 pagesWatcha 4arami28No ratings yet
- A Brief Guide To ServosDocument7 pagesA Brief Guide To ServosRodrigo OrtizNo ratings yet
- Laboratory Exercise 8 - Servo Motor: A. MaterialsDocument4 pagesLaboratory Exercise 8 - Servo Motor: A. MaterialsKeen Gementiza CabalseNo ratings yet
- Cabalse - Keen LE8 NocodeDocument3 pagesCabalse - Keen LE8 NocodeKeen Gementiza CabalseNo ratings yet
- CPEN 100 Laboratory No. 4Document8 pagesCPEN 100 Laboratory No. 4Jiever AustriaNo ratings yet
- Servo MotorDocument4 pagesServo MotorMOHAN RAJNo ratings yet
- Servo Motor Control With An ArduinoDocument8 pagesServo Motor Control With An Arduinokedar nannikarNo ratings yet
- Understanding MR GeneralDocument8 pagesUnderstanding MR GeneralRicardo Antonio VasquezNo ratings yet
- Introduction To Servo Motors & Arduino PDFDocument6 pagesIntroduction To Servo Motors & Arduino PDFAhmad Sadam SyaeroziNo ratings yet
- Servo Encoder LabDocument8 pagesServo Encoder LabGoran MiljkovicNo ratings yet
- 23 24 Etac Criteria FinalDocument68 pages23 24 Etac Criteria Finalamare ayeleNo ratings yet
- WMA14-01 Jan2022-QPDocument28 pagesWMA14-01 Jan2022-QPJohn Soriano0% (1)
- Electric Charges and Fields MCQ Class 12 Physics Chapter 1Document8 pagesElectric Charges and Fields MCQ Class 12 Physics Chapter 1suousNo ratings yet
- Flanged Bearing Housings - FCM 500 SeriesDocument1 pageFlanged Bearing Housings - FCM 500 SeriesMohammed SaifyNo ratings yet
- Astm A36 Acero Al CarbonDocument3 pagesAstm A36 Acero Al CarbonMajo BárcenasNo ratings yet
- 03 Crude Oil Emulsion Properties and Their ApplicatioDocument13 pages03 Crude Oil Emulsion Properties and Their ApplicatioAisyah NingsihNo ratings yet
- Edexcel A Level Core 3 NotesDocument36 pagesEdexcel A Level Core 3 NotesSabrin OmarNo ratings yet
- K To 12 CG Melcs Merged/ Clustered RetainedDocument1 pageK To 12 CG Melcs Merged/ Clustered RetainedMarfe MontelibanoNo ratings yet
- DNAno 22-23 Lab OrganizationDocument4 pagesDNAno 22-23 Lab OrganizationFrancisco SousaNo ratings yet
- Sample Problem Speed N VelocityDocument15 pagesSample Problem Speed N VelocityEllen DispoNo ratings yet
- Question Bank Kom-1Document4 pagesQuestion Bank Kom-1Sumanth SunnyNo ratings yet
- PROCESS SAFETY Thermal Analysis and Calorimetry SolutionsDocument6 pagesPROCESS SAFETY Thermal Analysis and Calorimetry SolutionsDaniela Forero RamírezNo ratings yet
- Individual Choice Sequences in The Work of L.E.J. Brouwer: Joop NiekusDocument16 pagesIndividual Choice Sequences in The Work of L.E.J. Brouwer: Joop NiekusDimas Cabré i ChacónNo ratings yet
- Assessment of Direct Cone Penetration Test Methods For Predicting The Ultimate Capacity of Friction Driven PilesDocument11 pagesAssessment of Direct Cone Penetration Test Methods For Predicting The Ultimate Capacity of Friction Driven PilesSen HuNo ratings yet
- Module 2 Lesson 4Document5 pagesModule 2 Lesson 4Raquel NavarezNo ratings yet
- Noc19 Me17 Assignment5Document3 pagesNoc19 Me17 Assignment5mechanicalNo ratings yet
- 1.prog Report 2Document4 pages1.prog Report 2Subhajit GhoshNo ratings yet
- Stackup - CN TDS 1911 03 S1000H S1000HBDocument2 pagesStackup - CN TDS 1911 03 S1000H S1000HBMuhamad Sayid Akil MhsAkilNo ratings yet
- Carbide-Free Bainitic SteelsDocument65 pagesCarbide-Free Bainitic SteelsAmin MazraehNo ratings yet
- Lesson 5 The Normal Distribution and Areas Under The Normal Curve FinalDocument12 pagesLesson 5 The Normal Distribution and Areas Under The Normal Curve FinalSALVADOR JhemaicaNo ratings yet
- Sturm-Liouville EquationsDocument16 pagesSturm-Liouville Equationsvanaj123No ratings yet
- Whole PacketDocument396 pagesWhole PacketHenry DunaNo ratings yet
- James P. Hogan - 4 - Entoverse (1992)Document255 pagesJames P. Hogan - 4 - Entoverse (1992)CiprianNo ratings yet