Professional Documents
Culture Documents
TP Convertiss Machine EP CM Soyed Ab PDF
Uploaded by
Asm MaOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
TP Convertiss Machine EP CM Soyed Ab PDF
Uploaded by
Asm MaCopyright:
Available Formats
Sommaire
Liste de Matières
T.P1: ETUDE DES MONTAGES REDRESSEURS NON COMMANDES_____________________ 2
T.P2: ETUDE DU BOCAGE ET DE L’AMORÇAGE D’UN THYRISTOR____________________ 7
T.P3: ETUDE DES MONTAGES REDRESSEURS COMMANDES ________________________ 10
T.P4: ETUDE DES MONTAGES REDRESSEURS MIXTES_______________________________ 15
T.P5: PREDETERMINATION DE LA CARACTERISTIQUE _____________________________ 19
DE CHARGE MOYENNE DU REDRESSEUR S3 __________________________________________ 19
T.P 6: SIMULATION DE QUELQUES MONTAGES REDRESSEURS _____________________ 26
EN UTILISANT LE LOGICIEL " MATLAB " _____________________________________________ 26
T.P7: COMMANDE D’UN MCC PAR UN HACHEUR _____________________________________ 35
T.P8: ETUDE DES GRADATEURS ______________________________________________________ 41
T.P9: ETUDE DES ONDULEURS DE TENSIONS ________________________________________ 47
TP10: COMMANDE ELECTRIQUE DU MCC_____________________________________________ 56
TP11: DEMARRAGE DU MAS TRIPHASE PAR GRADATEUR__________________________ 65
T.P1: Etude des montages redresseurs non commandés
T.P1: Etude des montages redresseurs non commandés
TP d’Electronique de puissance & CM -2- Propose par Mr : SOYED-Abdessami
T.P1: Etude des montages redresseurs non commandés
I.Buts
Pour chaque montage redresseur et pour différents types de charges :
Observer les formes d’ondes de la tension et du courant redressé de la charge, ainsi que les
différentes tensions et courants des semi-conducteurs ; Calculer les différents paramètres
caractéristiques du montage redresseur.
II.Les montages parallèles simples
1. Montage P1
Q
v D i ch
L1 A
L2
V u ch R
L3
2. Montage P2
Q
v2 v1 D1 i ch
L1 A
D2
L2
V u ch
L3 Charge
TP d’Electronique de puissance & CM -3- Propose par Mr : SOYED-Abdessami
T.P1: Etude des montages redresseurs non commandés
3. Montage P3
Q
v'1 v1
i1 D1
i'1
L1 w
v'2 v2
i'2 i2 D2 ic
L2 w A
v'3 v3
i'3 i3 D3
L3 V Charge
uc
n2
III.Les montages parallèles doubles
1. Montage PD2
ic
A
Q
v '1 v1
i'1 i1 D1 D2
L1
uc
L2 V Charge
L3
D'1 D'2
N
2. Montage PD3
ic
w A
D1 D2 D3
Q v'1 v1
i'1 i1
L1
v'2
v2
L2
i' 2 i2 V
Charge
v'3 uc
v3
i'3 i3
L3
n1
n2
N D'1 D' 2 D'3
TP d’Electronique de puissance & CM -4- Propose par Mr : SOYED-Abdessami
T.P1: Etude des montages redresseurs non commandés
3. Montage S3
ic
w A
v'1 v1 D1 D2 D3
i'1
i1
j1 i2
V uc
j2 i3 Charge
j3
D'1 D'2 D'3
IV.Travail demandé
Pour chaque montage :
1. Pour les valeurs suivantes de la résistance, de l’inductance:
R = 100, L = 0.5H .
R = 200, L = 0.05H .
1.1. Relever les caractéristiques suivantes :
uc= (), en déduire sa période, ic = f (),vD1 = f (), en déduire sa valeur maximale, iD1 = f
(),
1.2. Mesurer et calculer les valeurs moyennes des grandeurs (uc ; ic).
1.3. Conclure,
2. Observer le phénomène de l’empiètement pour un courant de charge assez significatif
2.1. Déterminer l’angle d’empiètement (), en déduire la valeur de son inductance ( ),
et calculer sa chute de tension moyenne,
3. Complément : charge (R, E) :
3.1. Relever les caractéristiques suivantes sur une période: uc = f (), ic = f () et
vD1 = f (),
3.2. Mesurer et calculer les valeurs moyennes des grandeurs (uc, ic).
3.3. Conclure,
4. Déterminer et calculer les facteurs de puissance primaire et secondaire (fp, fs).
TP d’Electronique de puissance & CM -5- Propose par Mr : SOYED-Abdessami
T.P1: Etude des montages redresseurs non commandés
5. Conclure.
V.Relations et formules fondamentales
1.Montage P1
Vm
a. Charge (R): (u ch ) moy
π
Vm
b. Charge (R, L) : (u ch ) moy = [1+cos(w.t 2 )]
π
2Vm
2.Montage P2 : Charge quelconque : (u ch ) moy =
π
3 3 3 6
3.Montage P3 : Charge quelconque : (u ch ) moy = Vm = V
2π 2π
2Vm 2 2
4.Montage PD2 : (u ch )moy = = V
π π
3 3 3 6
5.Montage PD3 : (u ch ) moy = Vm = V
π π
TP d’Electronique de puissance & CM -6- Propose par Mr : SOYED-Abdessami
T.P 4: Etude des montages redresseurs mixtes
T.P2: Etude du bocage et de l’amorçage d’un thyristor
TP d’Electronique de puissance & CM -7- Propose par Mr : SOYED-Abdessami
T.P 4: Etude des montages redresseurs mixtes
I.Buts
Pour chaque montage redresseur et pour différents types de charges :
Observer les formes d’ondes de la tension et du courant redressé de la charge, ainsi que les
différentes tensions et courants des semi-conducteurs et calculer les différents paramètres
caractéristiques du montage redresseur.
II.Le thyristor
1. Description
Composant unidirectionnel: le courant ne peut passer que dans le sens anode cathode La borne G
permet de déclencher la mise en conduction ou amorçage.
2. Propriétés
a. Mise en conduction :
Th conduit si on a uAK >0 ou le courant iAK >0 et on a un courant de gâchette suffisant.
Si uAK >1 V et iG>IGT (courant de gâchette pour un amorçage certain) le thyristor s’amorce.
Le thyristor n'est réellement amorcé que si iAK > iL (courant d'accrochage).
Le thyristor amorcé reste conducteur si on supprime le courant de gâchette.
b.Blocage ou extinction :
-Par le courant si iAK <IH
-Par la tension inverse u AK <0 appliquée pendant t > tq (quelques centaines de µs temps de
désamorçage).
c. Paramètres du thyristor TIC 106 :
IT IGT max (mA) VGTmax (V) IHmax V T max
5A 0,2mA 1,5 V 5mA 1,7V
VGT tension de gâchette d'amorçage ;
IT : courant direct moyen admissible.
TP d’Electronique de puissance & CM -8- Propose par Mr : SOYED-Abdessami
T.P 4: Etude des montages redresseurs mixtes
3. Mesures des paramètres d'un thyristor
3.1. Montage
Charge
R Rh
A K
G V
Eg V
E
K1 K2
3.2. Amorçage te désamorçage
Les deux interrupteurs sont ouverts le thyristor n'est pas amorcé E vaut 12V. On ferme
l'interrupteur K2 puis l'interrupteur K1 en partant de Eg=0V l'amorçage sera obtenu par action sur
Eg .
*Mesurer la valeur minimale I GT provoquant l'amorçage certain (plusieurs mesures et on prend
la valeur la plus grande) en faisant varier Eg de 0 à la valeur qui amorce le thyristor.
Mesurer vGT correspondante (entre G et K).
*Mesurer vAK avant amorçage et après amorçage. Pour Rh=0, mesurer VT et I. Comparer avec
la valeur du constructeur.
*Que se passe-t-il quand on ouvre le courant de gâchette ? Conclure.
3.3. Courant de maintien IH
Avec Rh=106, amorcer le thyristor puis annuler IG (K1 ouvert) diminuer progressivement Eg
jusqu'au désamorçage noter la valeur de I H juste avant le désamorçage .Comparer avec les
données du constructeur.
TP d’Electronique de puissance & CM -9- Propose par Mr : SOYED-Abdessami
T.P 4: Etude des montages redresseurs mixtes
T.P3: Etude des montages redresseurs commandés
TP d’Electronique de puissance & CM - 10 - Propose par Mr : SOYED-Abdessami
T.P 4: Etude des montages redresseurs mixtes
I. Objectifs
Pour chaque montage redresseur et pour différents types de charges :
Observer les formes d’ondes de la tension et du courant redressé de la charge, ainsi que les
différentes tensions et courants des semi-conducteurs et calculer les différents paramètres
caractéristiques du montage redresseur.
II. Le thyristor
1. Description
Composant unidirectionnel: le courant ne peut passer que dans le sens anode cathode La borne
« G » permet de déclencher la mise en conduction ou amorçage.
2. Propriétés
a. Mise en conduction :
Th conduit si on a uAK >0 ou le courant iAK>0 et on a un courant de gâchette suffisant.
Si uAK >1V et iG>IGT (courant de gâchette pour un amorçage certain) le thyristor s’amorce.
Le thyristor n'est réellement amorcé que si iAK > iL (courant d'accrochage).
Le thyristor amorcé reste conducteur si on supprime le courant de gâchette.
b. Blocage ou extinction :
-Par le courant si iAK <I H
-Par la tension inverse uAK<0 appliquée pendant t>tq (quelques centaines de µs temps de
désamorçage).
III. Les montages parallèles simples
1. Montage P1
Q
v Th i ch
L1 A
L2 R
V u ch
L3
L
N
TP d’Electronique de puissance & CM - 11 - Propose par Mr : SOYED-Abdessami
T.P 4: Etude des montages redresseurs mixtes
2. Montage P2
Q
v'1 v2 v1
i'1 i1 Th1 i ch
L1 A
Th 2
L2 i2
V u ch Charge
L3
3. Montage P3
Q
v'1 v1 Th 1
i'1 i1
L1 w
v' 2 v2 Th 2
i'2 i2 i ch
L2
w A
v'3 v3 Th 3
i'3 i3
L3 V Charge
u ch
n2
TP d’Electronique de puissance & CM - 12 - Propose par Mr : SOYED-Abdessami
T.P 4: Etude des montages redresseurs mixtes
IV. Les montages parallèles doubles
1. Montage PD2
i ch
A
Q v'1 v1 Th 1 Th 2
i'1
L1 i1
V u ch Charge
L2
L3
Th'1 Th' 2
2. Montage PD3
ich
w A
Th1 Th 2 Th 3
Q v'1 v1
i'1 i1
L1
v'2
v2
L2
i' 2 i2 V
Charge
v'3
v3
L3
i' 3 i3
n1 u ch
n2
N Th'1 Th' 2 Th' 3
3. Montage S3
i ch
w A
i'1 v'1 v1 Th 1 Th 2 Th 3
L1 i1
v'2
i' 2
L2 j1 i2
V u ch Charge
v'3 j2
i' 3 i3
L3
j3
N Th'1 Th' 2 Th' 3
TP d’Electronique de puissance & CM - 13 - Propose par Mr : SOYED-Abdessami
T.P 4: Etude des montages redresseurs mixtes
V. Travail demandé
Pour chaque montage :
1. Pour les valeurs suivantes de la résistance et de l’inductance :
R = 200, L = 0.5H.
R = 100, L = 0.25H
1.1. Relever les caractéristiques suivantes : u ch (θ) , en déduire sa période, ich (θ) , vTh1 (θ) , en
déduire sa valeur maximale, iTh1 (θ) .
1.2. Mesurer et calculer les valeurs moyennes des grandeurs (uch ; ich).
1.3. Conclure.
2. Observer le phénomène de l’empiètement pour un courant de charge assez significatif,
déterminer l’angle d’empiètement (), en déduire la valeur de son inductance (), et calculer
sa chute de tension moyenne,
3. Complément : charge (R, E) :
3.1. Relever les caractéristiques suivantes sur une période: u ch (θ) , ich (θ) et vTh1 (θ) .
3.2. Mesurer et calculer les valeurs moyennes des grandeurs (uc, ic).
3.3. Conclure.
4. Déterminer et calculer les facteurs de puissance primaire et secondaire (fp, fs).
5. Conclure.
TP d’Electronique de puissance & CM - 14 - Propose par Mr : SOYED-Abdessami
T.P 4: Etude des montages redresseurs mixtes
T.P4: Etude des montages redresseurs mixtes
TP d’Electronique de puissance & CM - 15 - Propose par Mr : SOYED-Abdessami
T.P 4: Etude des montages redresseurs mixtes
I.Buts
Pour chaque montage redresseur et pour différents types de charges :
Observer les formes d’ondes de la tension et du courant redressé de la charge, ainsi que les
différentes tensions et courants des semi-conducteurs ; Calculer les différents paramètres
caractéristiques du montage redresseur,
II.Montages
1. Montage PD2 symétrique
ic
A
i'1 m i1 Th 1 Th 2
v'1 v1 uc Charge
V
D1 D2
2. Montage PD2 asymétrique
ic
A
i'1 m i1 Th 1 D1
v'1 v1 uc
V Charge
Th 2 D2
TP d’Electronique de puissance & CM - 16 - Propose par Mr : SOYED-Abdessami
T.P 4: Etude des montages redresseurs mixtes
3. Montage PD3 mixte
ic
w
A
Th 1 Th 2 Th 3
v'1 v1
i'1 i1
v' 2
v2
i'2 i2 V
Charge
v'3 uc
i'3 v3 i3
n1
n2
D1 D2 D3
4. Montage S3 mixte
ic
w A
v'1 v1 Th 1 Th 2 Th 3
i'1
i1
j1 i2
V uc Charge
j2 i3
j3
D1 D2 D3
III.Travail demandé
Pour chaque montage :
1. Pour les valeurs suivantes de la résistance, de l’inductance et de la f.é.m. :
R = 100, L = 0.5H.
R = 200, L = 0.25H .
1.1. Relever les caractéristiques suivantes :
uch= f(), en déduire sa période, ich=f(),vD1=f(), en déduire sa valeur maximale, iD1=f(),
1.2. Mesurer et calculer les valeurs moyennes des grandeurs (uch ; ich).
1.3. Conclure,
TP d’Electronique de puissance & CM - 17 - Propose par Mr : SOYED-Abdessami
T.P 4: Etude des montages redresseurs mixtes
2. Complément charge (R, E)
2.1. Relever les caractéristiques suivantes sur une période: uch=f(), ich=f() et vD1= f (),
2.2. Mesurer et calculer les valeurs moyennes des grandeurs (uch, ich).
2.3. Conclure,
3. Déterminer et calculer les facteurs de puissance primaire et secondaire (fp, fs).
4. Conclure.
TP d’Electronique de puissance & CM - 18 - Propose par Mr : SOYED-Abdessami
T.P5: Prédétermination de la caractéristique de charge moyenne du redresseur S3
T.P5: Prédétermination de la caractéristique
de charge moyenne du redresseur S3
TP d’Electronique de puissance & CM - 19 - Propose par Mr : SOYED-Abdessami
T.P5: Prédétermination de la caractéristique de charge moyenne du redresseur S3
I. Buts
Prédéterminer la caractéristique de charge moyenne (u c ) moy f(i c ) moy ) du montage série S3 à
diodes, La comparer avec celle obtenue d’une manière directe et conclure.
II. Aperçu théorique
1. Montage
Considérons le montage de la figure suivante :
ic
v'1 v1 D1 D2 D3
i'1
i1
j1 i2 uc Charge
j2 i3
j3
D'1 D'2 D'3
Analyse de fonctionnement :
Les enroulements primaires du transformateur triphasé peuvent être couplés en étoile ou en
triangle (, ), alors que les enroulements secondaires doivent être couplés en triangles et sont
les sièges de trois tensions triphasées équilibrées (v1, v2, v3):
2π 4π
v1 Vm sin(wt); v 2 Vm sin(wt ) et v3 Vm sin(wt )
3 3
Les diodes (D1, D2 et D3) conduisent dès que la tension correspondante devient positive.
Les diodes (D’1, D’2 et D’3) conduisent dès que la tension correspondante devient négative.
TP d’Electronique de puissance & CM - 20 - Propose par Mr : SOYED-Abdessami
T.P5: Prédétermination de la caractéristique de charge moyenne du redresseur S3
2. Abaque des tensions et des courants
u 12 u 13 u 23 u 21 u 31 u 32 u 12 u 13 u 23
v1 v2 v3 v1
1 2 3 4 5 6 7 8 9 10 11 12
TP d’Electronique de puissance & CM - 21 - Propose par Mr : SOYED-Abdessami
T.P5: Prédétermination de la caractéristique de charge moyenne du redresseur S3
3. Caractéristiques électrocinétiques
3Vm
Valeur moyenne de la tension de charge redressée : (u c ) moy ,
π
Tension inverse maximale d’un redresseur : (v D1 ) max Vm 3 ,
I I
Courants moyen et efficace d’un semi- conducteurs : (i D1 ) moy ; (i D1 ) eff ,
3 3
I
Courant efficace d’une phase secondaire : (j1 ) eff 2,
3
I
Courant efficace d’une phase primaire : (i p1 ) eff I p m 2.
3
4. Caractéristiques énergétiques
La puissance instantanée transmise au niveau de la charge est donnée par:
p u ch .i ch , dont la valeur moyenne est (p) moy =(u ch ) moy .I .
Vm 2
La puissance apparente calculée au niveau secondaire est Ss =3Vs Is =3 I=Vm I .
2 3
(pch ) moy 3
Les facteurs de puissance secondaire et primaire (fs) et (fp) : fs =f p = = .
Ss π
5. Etude des imperfections du coté alternative
5.1. Chute de tension moyenne due à l’empiétement
λwI
On démontre qu’elle est donnée par : Δ1u c X s .I .
π
5.2. Chute de tension moyenne due aux résistances
2
Si le primaire est couplé en étoile Δ 2 u c = rs +m 2 (rp +rL ) =R c I
3
2
Si le primaire est couplé en triangle Δ2 u c = rs +m 2 (rp +3rL ) I=R c I .
3
5.3. Chute de tension moyenne due aux diodes
On démontre qu’elle est donnée par Δ3u c =(vD )ic =2(Vs +R d )I
TP d’Electronique de puissance & CM - 22 - Propose par Mr : SOYED-Abdessami
T.P5: Prédétermination de la caractéristique de charge moyenne du redresseur S3
5.4. Modèle du convertisseur S3 en régime permanent
En valeurs moyennes, on a :
V's Xs
I R's
U ch
U ch0
3 2 λw
Avec : U ch0 = Vm , V's =2.Vs ; R's =2R d + R s =2R d +R c et X s
π 3 π
III. Etude pratique
1. Essai à vide
Le transformateur triphasé utilisé est de 3kVA, 220 / (2*63.5V) et 50Hz.
A partir de l’essai avide :
1.1. Déterminer le rapport de transformation (m) par colonne du transformateur,
1.2. Schéma pratique
v'1 v1
V V
2. Essais en court-circuit et mesure des résistances des enroulements
Moyennant une méthode voltampéremètrique ou bien en utilisant un multimètre :
2.1. Mesurer les résistances des enroulements,
A partir de l’essai en court-circuit :
2.2. Evaluer l’inductance de fuite du transformateur moyennant la formule de Joubert
TP d’Electronique de puissance & CM - 23 - Propose par Mr : SOYED-Abdessami
T.P5: Prédétermination de la caractéristique de charge moyenne du redresseur S3
2.3. Schémas pratiques
v'1 v1
R
A
S
V
Pour l’essai en court-circuit, on alimente le primaire sous une tension réduite, de façon à obtenir
au secondaire un courant de court-circuit égale au courant nominal (I2cc=I2n),
U1cc
Zs ; λω= Zs2 -R s2 et R s =rs +m 2 rp
I 2cc
3. Essai à courant continu
A partir de la caractéristique statique d’une diode, déterminer sa tension de seuil, et sa résistance
dynamique.
4. Caractéristique de charge moyenne du montage S3
A partir du modèle du convertisseur S3, prédéterminer et tracer la caractéristique de charge
moyenne (uch)moy = ( ich)moy, pour les différentes valeurs de charge suivante,
(ich)moy (A) 1 2 3 4 5 6 7 8
(uch)moy(V)
TP d’Electronique de puissance & CM - 24 - Propose par Mr : SOYED-Abdessami
T.P5: Prédétermination de la caractéristique de charge moyenne du redresseur S3
5. Réaliser le montage de la figure suivante
ic
w A
v'1 v1 D1 D2 D3
i'1
i1
j1 i2 V uc
j2 i3 Charge
j3
D'1 D' 2 D'3
5.1. Tracer la caractéristique de charge moyenne (u ch ) moy f(i ch ) moy ) , pour les mêmes
valeurs différentes de courant charge que précédemment,
5.2. Conclure.
TP d’Electronique de puissance & CM - 25 - Propose par Mr : SOYED-Abdessami
T.P 6: Simulation des montages redresseurs en utilisant le logiciel " Matlab "
T.P 6: Simulation de quelques montages redresseurs
en utilisant le logiciel " Matlab "
TP d’Electronique de puissance & CM - 26 - Propose par Mr : SOYED-Abdessami
T.P 6: Simulation des montages redresseurs en utilisant le logiciel " Matlab "
I. Buts
Simuler les montages redresseurs en utilisant le logiciel « Matlab Simulink ».
Observer les formes d’ondes de la tension et du courant redressé de la charge, ainsi que les
différentes tensions et courants des semi-conducteurs ; calculer les différents paramètres
caractéristiques du montage redresseur. Et les comparés avec celles vu pratiquement.
II. Introduction à MATLAB & Simulink
Matlab est un système interactif et convivial de calcul numérique et de visualisation graphique
destiné aux ingénieurs et scientifiques. Il possède un langage de programmation puissant et
simple à utiliser avec lequel l’utilisateur peut effectuer des calculs en ligne ou par l’intermédiaire
d’un fichier de commande dont l’extension (.m).
Le logiciel Matlab (Matrix Laboratory) est basé sur le calcul matriciel numérique. Tous les
objets utilisés dans Matlab sont donc définis au travers de matrices ou vecteurs dont les valeurs
sont, par définition, des grandeurs complexes. Il existe un très grand nombre d’opérateurs et
fonctions distribués dans le logiciel de base et dans des boites à outils spécialisées. A ceci
s’ajoute un outil de programmation graphique, Simulink, essentiel pour la simulation de
systèmes dynamiques non linéaires.
L’environnement Matlab se présente sous la forme d’un espace de travail dans lequel un
interpréteur de commande exécute les opérations demandées.
III. Exemples de manipulation
1. A l’aide de souris on fait les instructions suivantes :
Démarrer ProgrammesMatlab7.0.
2. La fenêtre du Matlab s’ouvre :
TP d’Electronique de puissance & CM - 27 - Propose par Mr : SOYED-Abdessami
T.P 6: Simulation des montages redresseurs en utilisant le logiciel " Matlab "
3. En cliquant sur l’icône Simulink, on obtient la fenêtre suivante:
4. On s’intéresse par la suite au bloc Sim power Systems
TP d’Electronique de puissance & CM - 28 - Propose par Mr : SOYED-Abdessami
T.P 6: Simulation des montages redresseurs en utilisant le logiciel " Matlab "
5. Création d’un nouveau fichier
Dans le menu Simulink library Browser : file new Model, on obtient :
6. Sauvegarde d’un fichier sous le nom Soyed
Dans le menu untitled : file save as, et vous donner le nom du fichier, on obtient alors :
TP d’Electronique de puissance & CM - 29 - Propose par Mr : SOYED-Abdessami
T.P 6: Simulation des montages redresseurs en utilisant le logiciel " Matlab "
7. Importation des composants (générateur de tension, diode, charge) permettant la
réalisation d’un tel d’un montage redresseur :
8. Modification des paramètres des composants (générateur de en cliquant deux fois à
l’aide de la souris sur le composant désirant modifier leurs paramètres.
Source de tension : (Amplitude= 220. 2V , fréquence = 50Hz)
TP d’Electronique de puissance & CM - 30 - Propose par Mr : SOYED-Abdessami
T.P 6: Simulation des montages redresseurs en utilisant le logiciel " Matlab "
Charge : des branches en série (R = 50 ; L = 0H ; C = inf )
9. Configuration de certains paramètres de la simulation :
Etant donné que les montages redresseurs sont des systèmes non linéaires, c’est pour cette
raison « Matlab utilise des solveurs pour la résolution des équations différentielles non
linéaires : ode23b, ode23s, ode15s.
TP d’Electronique de puissance & CM - 31 - Propose par Mr : SOYED-Abdessami
T.P 6: Simulation des montages redresseurs en utilisant le logiciel " Matlab "
10. Lancer la simulation (période de simulation 0.04s)
11. Résultats de la simulation du montage P1R
TP d’Electronique de puissance & CM - 32 - Propose par Mr : SOYED-Abdessami
T.P 6: Simulation des montages redresseurs en utilisant le logiciel " Matlab "
12. Exemple de simulation d’un montage redresseur P3KC commandé
P3_kc_Thyristors _RL
g m
a k
g m
a k
y
g m
+
a k v
-
+
v
-
+
v
-
+
v
-
13. Résultats de la simulation P3KC commandé
400
uch
300
200
100
-100
-200
-300
vTh1
-400
-500
-600
0.01 0.015 0.02 0.025 0.03 0.035 0.04
Temps(s)
TP d’Electronique de puissance & CM - 33 - Propose par Mr : SOYED-Abdessami
T.P 6: Simulation des montages redresseurs en utilisant le logiciel " Matlab "
IV. Travail demandé
1. Simuler les montages redresseurs non commandés suivants : P2, P3, PD2, PD3 et S3.
2. Simuler les montages redresseurs commandés suivants : P2, P3, PD2, PD3.
3. Calculer les différents paramètres caractéristiques du montage redresseur.
4. Comparer les courbes obtenues avec celles de la pratique.
5. Conclusion
6. Présenter un compte-rendu.
TP d’Electronique de puissance & CM - 34 - Propose par Mr : SOYED-Abdessami
T.P 7 : Commande d’un Mcc par un Hacheur avec régulation de la vitesse et du courant
T.P7: Commande d’un Mcc par un Hacheur
TP d’Electronique de puissance & CM - 35 - Propose par Mr : SOYED-Abdessami
T.P 7 : Commande d’un Mcc par un Hacheur avec régulation de la vitesse et du courant
I.Présentation
Désignation du matériel Système de plaques
Transformateur à courant triphasé P 10.20
Redresseur de courant B6U P10.45
Appareil de commande P10.41
Masque «Régulation» pour 10.41 M 10.41.2
Elément de puissance 1 P 10.42
Masque «FET» pour P10.42 M 10.42.3
Multimètre (2x) UM4
Appareil de mesure de la valeur efficace UM4e
Oscilloscope à deux voies 1
Sonde atténuateur 10: 1 1
Fibre optique 5510100
Moteur shunt à courant continu MS1 MS 11
Masque de raccordement 1M 11M
Plaque support pour appareils 70 00 205
TP d’Electronique de puissance & CM - 36 - Propose par Mr : SOYED-Abdessami
T.P 7 : Commande d’un Mcc par un Hacheur avec régulation de la vitesse et du courant
II.Buts
Il s'agit d'étudier le mode de fonctionnement d'un hacheur avec charge moteur et régulation de la
vitesse de rotation avec régulation du courant en cascade.
1ère expérience: Etude de l'allure du courant pour diverses valeurs de consigne.
2ème expérience: Détermination des caractéristiques de commande pour la régulation P et PI.
2ème expérience: Etude des conséquences de différents réglages des paramètres du régulateur.
III.Réalisation
1 ère expérience: Etude de l'allure du courant pour diverses valeurs de consigne
1.1 Branchement de l'élément de puissance
1.1.1 Schéma des connexions de l'élément de puissance
1.1.2 Branchement de l'alimentation en tension
- Branchez en étoile les enroulements secondaires du transformateur à courant triphasé
P10.20.
TP d’Electronique de puissance & CM - 37 - Propose par Mr : SOYED-Abdessami
T.P 7 : Commande d’un Mcc par un Hacheur avec régulation de la vitesse et du courant
- Amenez les prises de 90 V au redresseur de courant P10.45.
(!) Il en résulte une tension continue de UB= 230 V.
- Reliez le pôle positif du redresseur de courant P10.45 à la douille +U B de l'élément de
puissance P10.42.
(!) Le raccord du pôle plus de P10.45 ne doit pas être connecté à la douille +UM de P10.42
parce que celle-ci n'est pas reliée par voie interne à la douille +Us.
- Reliez le pôle négatif du redresseur de courant P10.45 à la douille «GND» de l'élément de
puissance P10.42.
(!) La douille «GND» ne doit pas être reliée au point de mesure de référence (douille1-), ni
directement, ni indirectement par l'intermédiaire de l'oscilloscope.
1.1.3 Branchement de la charge moteur et de la génératrice tachymétrique.
- Branchez le moteur shunt à courant continu MS1 / MS11 à "élément de puissance P10.42.
Branchez l'enroulement inducteur à la borne 230 V- du transformateur à courant triphasé P10.20
(excitation séparée).
- Branchez UM4e, calibre 1 ~, (appareil de mesure P1), pour la mesure du courant de charge.
- Branchez la génératrice tachymétrique au régulateur P1 0.41,
1.2 Branchement du régulateur
TP d’Electronique de puissance & CM - 38 - Propose par Mr : SOYED-Abdessami
T.P 7 : Commande d’un Mcc par un Hacheur avec régulation de la vitesse et du courant
1.2.1 Schéma des connexions pour la commande de l'élément de puissance
1.2.2 Etablissement des liaisons et réglages de base
- Etablissez les liaisons pour +15 V, -15 V et 0 de l'appareil de commande P10.41 à
l'élément de puissance P10.42 à l'aide de pontets de liaison de 19 mm.
- Mettez le pontet «mode» en place sur les plaques P10.41 et 10.42.
- Etablissez la liaison pour la transmission des impulsions de commande de l'appareil de
commande à l'élément de puissance soit par fibre optique (fibre optique), soit par la liaison à
deux fils (deux pontets de liaison de 19 mm) disposée au-dessus.
- Insérez une liaison de rétroaction entre la douille lM de l'élément de puissance et la douille
Ireal du régulateur.
- Réglez la grandeur de référence w (valeur de consigne de la vitesse de rotation) et amenez
le coefficient de proportionnalité Kp à la butée gauche
(W = OV, Kp = 1).
- Connectez l'interrupteur pour TN sur O.
- Amenez le bouton de réglage pour I sur 10 (butée droite).
TP d’Electronique de puissance & CM - 39 - Propose par Mr : SOYED-Abdessami
T.P 7 : Commande d’un Mcc par un Hacheur avec régulation de la vitesse et du courant
1.2.3 Branchement des instruments de mesure
- Branchez l'instrument de mesure P2 (UM4), calibre 100 V-, à la douille nreal et ┴ du
régulateur P1 0.41.
- Branchez l'instrument de mesure P3 (UM4), calibre 10 V-, à la douille w (nset) et ┴ du
régulateur P10.41.
1.2.4 Branchement et réglage de base de l'oscilloscope
- Reliez le raccord de mise à la masse de l'oscilloscope au point de mesure de
référence du régulateur P1 0.41.
- Déclenchement: Interne; entrée Y1front positif
- Base de temps: 2 ms/div (à modifier à volonté)
- Reliez l'entrée Y1 de l'oscilloscope à la douille y (valeur de réglage) du régulateur P1
0.41; Sensibilité: 5 V /div
- Reliez l'entrée Y2 de l'oscilloscope à la douille lM (courant de charge) de l'élément de
puissance P10.42. Sensibilité:1 V/div
1.3.1 Mettez les appareils en route.
TP d’Electronique de puissance & CM - 40 - Propose par Mr : SOYED-Abdessami
T.P 8: Etude des gradateurs
T.P8: Etude des gradateurs
TP d’Electronique de puissance & CM - 41 - Propose par Mr : SOYED-Abdessami
T.P 8: Etude des gradateurs
I. Buts
Etudier le fonctionnement des gradateurs monophasé et voir l’influence de type de la charge à
son fonctionnement, études de différentes formes de courants et des tensions des éléments des
gradateurs.
II. Gradateur monophasé
1. Montage
Th 1 ic
A w
v' v Th 2 V
Charge
uc
1.1. Pour une charge : R=200
Tracer les caractéristiques uc () et ic(),
Tracer les caractéristiques vTh (),
Tracer les caractéristiques Pc ().
1.2. Pour une charge : RL
Etudier l’influence de l’inductance L sur le fonctionnement du montage pour les impulsions
brèves ou larges dans les cas suivants :
a.>
Tracer les caractéristiques uc () et ic(),
Tracer les caractéristiques vTh (),
Tracer les caractéristiques Pc ().
b. <
Tracer les caractéristiques uc () et ic(),
Tracer les caractéristiques vTh (),
Tracer les caractéristiques Pc ().
TP d’Electronique de puissance & CM - 42 - Propose par Mr : SOYED-Abdessami
T.P 8: Etude des gradateurs
III. Etude du gradateur triphasé
1. Montage
V
vR v1
Th1
A
Th'1
vT v2
Th 2 Charge
Th' 2
vS v3
Th 3
Th'3
2. Principe de fonctionnement
Les tensions du réseau sont :
v R =Vm .sin(θ)
2π
vS =Vm .sin(θ- )
3
2π
v T =Vm .sin(θ+ 3 )
Chaque sixième de période un des thyristors est branché dans l’ordre Th1, Th’3, Th2, Th’1, Th3,
Th’2.
L’angle de retard d’amorçage varie de 0 jusqu’à 150°.donc on trouve 2ou3 modes de
fonctionnement du montage gradateur triphasé suivant la nature de charge.
2.1. Pour une charge résistive
Il existe 3 modes de fonctionnement :
Première mode de fonctionnement :
π
Quand 3 ou 2 thyristors sont passants en même temps, c’est le cas où 0<α< .
3
TP d’Electronique de puissance & CM - 43 - Propose par Mr : SOYED-Abdessami
T.P 8: Etude des gradateurs
Deuxième mode de fonctionnement :
2π
Quand toujours 2 thyristors sont passants pendant un angle ( θ= ). Par exemple le thyristor
3
Th1 fonctionne avec Th’2 ou Th1 fonctionne avec Th’3, dans ce cas l’angle d’amorçage () varie
π π
dans l’intervalle où <α< .
3 2
Troisième mode de fonctionnement :
Quand toujours 2 thyristors sont passants, mais dans ce cas le thyristor Th1 fonctionne avec Th’2,
puis il y a un arrêt de fonctionnement, et reprend le fonctionnement avec Th’3, cet arrêt de
5π
fonctionnement est apparaît a cause de l’annulation de la tension u13 à l’instant ( θ= ), suite à
6
l’arrêt la tension u12 sera appliqué aux bornes de 2 résistances des phases de conduction. On a
π 5π
donc des limites de variation de () de à .
2 6
IV. Travail demandé
1. Réaliser le montage du gradateur triphasé
2. Relever les caractéristiques uc, ic et vTh1, pour = 45°, =60°, dans le cas des charges
résistives et inductives.
3. Relever dans les cas des charges R et RL, les caractéristiques uceff=f ().
4. Déterminer le régime de fonctionnement du montage à 3 fils pour = 30°, =75° et =
90°, pour une charge R et RL.
5. Visualiser l’allure de la tension v1, pour un montage à 4fils.
6. Conclure.
TP d’Electronique de puissance & CM - 44 - Propose par Mr : SOYED-Abdessami
T.P 8: Etude des gradateurs
Formules utilisées :
1. Gradateur monophasé
Pour une charge R :
α sin(2α)
Tensions de charge efficace : (u c )eff =V. 1- + .
π 2π
uc
θ
π
α
2θ 2 -2α+sin(2α)-sin(2θ 2 )
Pour une charge R L: (u c )eff =V.
2π
θ-α
Vm V -( ) L.w
ic (θ)= sin(θ- )- m sin(α- ).e w.τ , avec Z R 2 (Lw) 2 et tang( ) .
Z Z R
Cas >
uc
if
θ
π θ1
TP d’Electronique de puissance & CM - 45 - Propose par Mr : SOYED-Abdessami
T.P 8: Etude des gradateurs
2. Gradateur triphasé
Pour une charge R :
α sin(2α)
Tensions de charge efficace : (u c )eff =V. 1- + .
π 2π
Pour une charge R L:
2θ2 -2α+sin(2α)-sin(2θ 2 )
(u c )eff =V.
2π
θ-α
Vm V -( )
ic (θ)= sin(θ-φ)- m sin(α-φ).e ω.τ ,
Z Z
Lw
avec Z R 2 (Lw) 2 et tang(φ)= .
R
400
300
200
100
-100
-200
-300
-400
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
TP d’Electronique de puissance & CM - 46 - Propose par Mr : SOYED-Abdessami
T.P 9: Etude des onduleurs
T.P9: Etude des onduleurs de tensions
TP d’Electronique de puissance & CM - 47 - Propose par Mr : SOYED-Abdessami
T.P 9: Etude des onduleurs
I. Objectifs
Se familiariser avec le logiciel « Psim ».
Etude de fonctionnement d’un onduleur monophasé « commande simple ».
Etude de fonctionnement d’un onduleur monophasé « commande décalée ».
Etude de fonctionnement d’un onduleur monophasé « commande MLI ».
Etude de fonctionnement d’un onduleur triphasé « commande simple ».
Etude de fonctionnement d’un onduleur triphasé « commande MLI ».
Analyser pour différentes charges, les fonctionnements des onduleurs cités.
II. Etude d’un onduleur de tension monophasé en pont
1. Commande symétrique
Pour une charge résistive R=20
Chronogrammes de uch et ich
TP d’Electronique de puissance & CM - 48 - Propose par Mr : SOYED-Abdessami
T.P 9: Etude des onduleurs
Pour un charge résistive R=20; L=0.2H
Chronogrammes de uch et ich
TP d’Electronique de puissance & CM - 49 - Propose par Mr : SOYED-Abdessami
T.P 9: Etude des onduleurs
2. Commande décalée
Pour un charge résistive R=20; L=0.08H
Chronogrammes de uch et ich
TP d’Electronique de puissance & CM - 50 - Propose par Mr : SOYED-Abdessami
T.P 9: Etude des onduleurs
3. Commande MLI unipolaire
Pour un charge résistive R=10; L=0.04H
Chronogrammes de p ; m et uch
TP d’Electronique de puissance & CM - 51 - Propose par Mr : SOYED-Abdessami
T.P 9: Etude des onduleurs
4. Commande MLI bipolaire
Pour un charge résistive R=10; L=0.04H
Chronogrammes de p ; m et uch
TP d’Electronique de puissance & CM - 52 - Propose par Mr : SOYED-Abdessami
T.P 9: Etude des onduleurs
III. Etude d’un onduleur de tension triphasé
1. Commande symétrique
Chronogrammes de v1 ; uch et ie
TP d’Electronique de puissance & CM - 53 - Propose par Mr : SOYED-Abdessami
T.P 9: Etude des onduleurs
2. Commande MLI
TP d’Electronique de puissance & CM - 54 - Propose par Mr : SOYED-Abdessami
T.P 9: Etude des onduleurs
IV. Travail demandé
Pour chaque montage :
1. Expliquer son principe de fonctionnement ?
2. Lancer le logiciel Psim, et réaliser le montage relatif pour chaque partie?
3. Relever les chronogrammes des tensions et courants ?
4. En déduire la fréquence, valeur efficace et la FFT ?
5. Commenter les courbes et les résultats obtenus ?
TP d’Electronique de puissance & CM - 55 - Propose par Mr : SOYED-Abdessami
TP10 : Commande électrique du moteur à courant continu
TP10: Commande électrique du Mcc
TP d’Electronique de puissance & CM - 56 - Propose par Mr : SOYED-Abdessami
TP10 : Commande électrique du moteur à courant continu
Maquette utilisée:
Matériels utilisés :
- Table électrotechnique avec alimentation variable monophasée, triphasée et continue
variables, alimentation continue pour excitation des moteurs et génératrices ex: table
LABEC CM8-15D,
- Groupe moteur génératrice CC 1,5 KW à excitation séparée sur chaises support à
roulettes ex: Réf LEROY SOMER moteur MS100, génératrice MSC4L,-1 Plan charge résistif
LABEC PC02L,
- EP260B ensemble rack d’étude des ponts redresseurs monophasés triphasés et
gradateur triphasé avec ses accessoires,
- 1 Voltmètre continu 500 Vdc,
- 2 Ampèremètres 0/15 A AC/DC,
- Oscilloscope numérique ex: FLUCK 196 et son logiciel de communication (facultatif),
pince ampèremétrique ex LEM PR30,
- Micro-ordinateur PC (facultatif)
TP d’Electronique de puissance & CM - 57 - Propose par Mr : SOYED-Abdessami
TP10 : Commande électrique du moteur à courant continu
1. Pont monophasé PD2T à thyristors
Réglage du courant Sécurité d' excitation
d' excitation 200mA min/2A max
~
A
A
Synchroniseur i1 i2 i3
1 T1 T2 T3 i1
~ 1
1 i2
v1 2 2 DRL i 3 V
M
~ 3
v2 3 i4
v3
T4 T5 T6 i5
N
i4 i5 i6
N i6
Fig.1: Mcc alimenté par PD2T
Manipulation:
Câbler le matériel comme indiquer sur le schéma ci-dessus:
Nota: le fait de brancher (alimentation triphasée) ne pose pas de problème, cette phase ne sera
pas prise en compte.
Brancher un ampèremètre en série avec l’inducteur, régler la tension variable d’excitation
à environ190V continu pour obtenir un courant d’excitation dans le moteur d’environ 0.4A,
dans le cas d’une alimentation d’excitation fixe, régler le courant d’excitation à l’aide d’un
rhéostat d’excitation,
Placer un voltmètre en sortie du pont afin de contrôler la tension continue appliquée à la
charge (tension nominale de fonctionnement 310Vdc pour une puissance de 2,015kW) et un
ampèremètre en série avec la charge pour ne pas dépasser le courant nominale du moteur (6.5A).
Régler la tension d’alimentation de puissance à 120V alternatif.
TP d’Electronique de puissance & CM - 58 - Propose par Mr : SOYED-Abdessami
TP10 : Commande électrique du moteur à courant continu
Paramétrage du Rack:
A’ l’aide du menu déroulant du pupitre de commande, choisir les options:
-Pont redresseur monophasé à thyristors «PD2T»,
Sécurité d’excitation active,
Sécurité pleine échelle active,
Marche,
Faire varier l’angle de retard à l’amorçage avec les curseurs du clavier panneau de
commande.
TP d’Electronique de puissance & CM - 59 - Propose par Mr : SOYED-Abdessami
TP10 : Commande électrique du moteur à courant continu
2. Pont redresseur triphasé PD3m Mixte :
Sécurité d' excitation
Réglage du courant
200mA min/2A max
d' excitation
~
A
A
Synchroniseur i1 i2 i3
~ T1 T2 T3 i1
1
1
v1 1 i2
2
2 2 M
v2 DRL i 3 V
3
3 3 i4
v3 i5
N T4 T5 T6
~
i4 i5 i6
N i6
B
Fig.2: Mcc alimenté par PD3m
Manipulation :
Câbler le matériel comme indiquer sur le schéma ci-dessus:
Brancher un ampèremètre en série avec l’inducteur, régler la tension variable d’excitation
à environ190V continu pour obtenir un courant d’excitation dans le moteur d’environ 0.4A, dans
le cas d’une alimentation d’excitation fixe, régler le courant d’excitation à l’aide d’un rhéostat
d’excitation,
Placer un voltmètre en sortie du pont afin de contrôler la tension continue appliquée à la
charge (tension nominale de fonctionnement 310Vdc pour une puissance de 2,015kW) et un
ampèremètre en série avec la charge pour ne pas dépasser le courant nominale du moteur (6.5A).
Régler la tension d’alimentation de puissance à 240V alternatif
TP d’Electronique de puissance & CM - 60 - Propose par Mr : SOYED-Abdessami
TP10 : Commande électrique du moteur à courant continu
Paramétrage du Rack
A’ l’aide du menu déroulant du pupitre de commande, choisir les options:
Pont redresseur mixte «PD3M »,
Sécurité d’excitation active,
Sécurité pleine échelle active,
Marche,
Faire varier l’angle de retard à l’amorçage avec les curseurs du clavier panneau de
commande.
3. Pont PD3T à thyristors
Réglage du courant Sécurité d' excitation
200mA min/2A max
d' excitation
~
A
A
Synchronis eur i1 i2 i3
~ i1
T1 T2 T3
1
1
v1 1 i2
2
2 2 M
v2 DRL i3 V
3
3 3 i4
v3 i5
N T4 T5 T6
~
i4 i5 i6
N i6
B
Fig.3: Mcc alimenté par PD3T
TP d’Electronique de puissance & CM - 61 - Propose par Mr : SOYED-Abdessami
TP10 : Commande électrique du moteur à courant continu
Manœuvre :
Câbler le matériel comme indiquer sur le schéma ci-dessus:
Brancher un ampèremètre en série avec l’inducteur, régler la tension variable d’excitation
à environ190V continu pour obtenir un courant d’excitation dans le moteur d’environ
0.4A, dans le cas d’une alimentation d’excitation fixe, régler le courant d’excitation à
l’aide d’un rhéostat d’excitation,
Placer un voltmètre en sortie du pont afin de contrôler la tension continue appliquée à la
charge (tension nominale de fonctionnement 310Vdc pour une puissance de 2,015kW) et
un ampèremètre en série avec la charge pour ne pas dépasser le courant nominale du
moteur (6.5A).
Régler la tension d’alimentation de puissance à 240V alternatif.
Paramétrage du Rack EP 260000
A’ l’aide du menu déroulant du pupitre de commande, choisir les options:
Pont redresseur tout thyristors «PD3T»,
Sécurité d’excitation active,
Sécurité pleine échelle active,
Marche,
Faire varier l’angle de retard à l’amorçage avec les curseurs du clavier panneau de
commande.
TP d’Electronique de puissance & CM - 62 - Propose par Mr : SOYED-Abdessami
TP10 : Commande électrique du moteur à courant continu
Travail demandé :
Pour chaque montage :
1. Pour le fonctionnement à vide du moteur et pour un angle d’amorçage ( α 30 ):
1.1. Visualiser la tension aux bornes du moteur,
1.2. Visualiser le courant dans moteur,
1.3. Visualisation des courant circulant dans les branches T1 et T5,
2. Pour le fonctionnement en charge du moteur:
(Le moteur est chargé par une génératrice alimentant une charge résistive variable)
2.1. Tout en variant l’angle d’amorçage, relever grandeurs absorbées par le moteur
correspondantes: puissance, courant et tension et noter la vitesse délivrée par le moteur.
α()
(uch)moy
(ich)moy
P
n(tr/min)
2.2. Pour chaque point, calculer le couple Te délivré par le moteur.
2.3. Tracer les courbes: Te (n) ; (uch) moy () ;
3. Présenter un compte rendu
TP d’Electronique de puissance & CM - 63 - Propose par Mr : SOYED-Abdessami
TP10 : Commande électrique du moteur à courant continu
Le rack EP 260000 est présenté en châssis isolant PVC avec faces avant comportant des
schémas synoptiques en «Lexan», l’appareil est à poser sur table. L’alimentation de puissance est
externe (400 VAC triphasé max, 20A). La console de commande est totalement numérique, elle
se raccorde au rack de puissance par un câble de type parallèle DB25/DB25M/M, et permet le
pilotage du convertisseur.
La console de pilotage EP261000 permet de :
Régler l angle de retard à l’amorçage,
Choisir et activer les différentes structures du rack EP260000, Redressement monophasé
PD2, Redressement triphasé PD3, Gradateur triphasé.
TP d’Electronique de puissance & CM - 64 - Propose par Mr : SOYED-Abdessami
TP11 : Démarrage du moteur asynchrone triphasé par gradateur
TP11: Démarrage du MAS triphasé par gradateur
TP d’Electronique de puissance & CM - 65 - Propose par Mr : SOYED-Abdessami
TP11 : Démarrage du moteur asynchrone triphasé par gradateur
Maquette utilisée:
Matériels utilisés :
- Table électrotechnique avec alimentation variable monophasée, triphasée et continue
variables, alimentation continue pour excitation des moteurs et génératrices ex: table LABEC
CM8-15D,
- Groupe moteur génératrice CC 1,5 KW à excitation séparée sur chaises support à
roulettes ex: Réf LEROY SOMER moteur MS100, génératrice MSC4L,-1 Plan charge résistif
LABEC PC02L,
- EP260B ensemble rack d’étude des ponts redresseurs monophasés triphasés et
gradateur triphasé avec ses accessoires,
- 1 Voltmètre continu 500 Vdc,
- 2 Ampèremètres 0/15 A AC/DC,
- Oscilloscope numérique ex: FLUCK 196 et son logiciel de communication (facultatif),
pince ampèremétrique ex LEM PR30,
- Micro-ordinateur PC (facultatif)
TP d’Electronique de puissance & CM - 66 - Propose par Mr : SOYED-Abdessami
TP11 : Démarrage du moteur asynchrone triphasé par gradateur
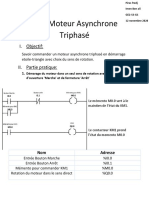
1. Gradateurs triphasé Grad3T
MAS A
3~
Synchroniseur i1 i2 i3
A i1
T1 T2 T3
~ 1
1
1 i2
v1
2 2 DRL i 3
2 3 i4
v2 3
~ V v3 i5
T4 T5 T6
N i4 i5 i6
i6
3 B
DT
Fig.1: MAS3~ alimenté par Grad3T
Manœuvre :
Câbler le matériel comme indiquer sur le schéma ci-dessus:
Insérer un ampèremètre dans la première phase pour contrôler le courant moteur,
Brancher un voltmètre pour mesurer la tension composée aux bornes du moteur,
La tension d’alimentation de la maquette ne doit dépasser la valeur 250V AC,
Le courant dans le moteur ne doit dépasser la valeur 6.5A.
Paramétrage du Rack :
A’ l’aide du menu déroulant du pupitre de commande, choisir les options:
Gradateur triphasé aval «Grad3T»,
Marche,
TP d’Electronique de puissance & CM - 67 - Propose par Mr : SOYED-Abdessami
TP11 : Démarrage du moteur asynchrone triphasé par gradateur
Faire varier l’angle de retard à l’amorçage avec les curseurs du clavier panneau de
commande.
2. Gradateurs triphasé mixte Grad3m
MAS A
3~
Synchroniseur i1 i2 i3
A i1
T1 T2 T3
1 1
~ i2
1
v1
2 2 DRL i3
2 3 i4
v2 3
~ V v3 i5
D1 D2 D3
N
i4 i5 i6 i6
3 B
DT
Fig.2: MAS3~ alimenté par Grad3m
Manœuvre :
Câbler le matériel comme indiquer sur le schéma ci-dessus:
Insérer un ampèremètre dans la première phase pour contrôler le courant moteur,
Brancher un voltmètre pour mesurer la tension composée aux bornes du moteur,
La tension d’alimentation de la maquette ne doit dépasser la valeur 250V AC,
Le courant dans le moteur ne doit dépasser la valeur 6.5A.
Paramétrage du Rack :
A’ l’aide du menu déroulant du pupitre de commande, choisir les options:
Gradateur triphasé aval mixte «Grad3m»,
Marche,
Faire varier l’angle de retard à l’amorçage avec les curseurs du clavier panneau de
commande.
TP d’Electronique de puissance & CM - 68 - Propose par Mr : SOYED-Abdessami
TP11 : Démarrage du moteur asynchrone triphasé par gradateur
Travail demandé :
Pour chaque montage :
1. Pour le fonctionnement à vide du moteur et pour un angle d’amorçage ( α 30 ):
1.1. Visualiser la tension aux bornes du moteur,
1.2. Visualiser le courant dans moteur,
1.3. Visualisation des courant circulant dans les branches T1 et T5,
2. Pour le fonctionnement en charge du moteur:
(Le moteur est chargé par une génératrice alimentant une charge résistive variable)
3. Tout en variant l’angle d’amorçage, relever grandeurs absorbées par le moteur
correspondantes: puissance, courant et tension et noter la vitesse délivrée par le moteur.
α()
(uch)moy
(ich)moy
P
n(tr/min)
3.1. Pour chaque point, calculer le couple Te délivré par le moteur.
3.2. Tracer les courbes: Te (n) ; (uch) moy () ;
4. Présenter un compte rendu.
TP d’Electronique de puissance & CM - 69 - Propose par Mr : SOYED-Abdessami
You might also like
- TP2 Onduleur TriphaséDocument10 pagesTP2 Onduleur Triphasédrissi kaitouni zineb100% (1)
- Examen Session Normale 2019-1Document4 pagesExamen Session Normale 2019-1marwanNo ratings yet
- Examen - M1 - ACM - CorrigéDocument2 pagesExamen - M1 - ACM - CorrigéAsm MaNo ratings yet
- TD CH11 - P - Hamrmonique - Elec PDFDocument2 pagesTD CH11 - P - Hamrmonique - Elec PDFAlpha Madridinium TV100% (2)
- Compte Rendu tp4Document11 pagesCompte Rendu tp4Kéran NTOUTOUME MVENGNo ratings yet
- TP N°02 CommandeDocument12 pagesTP N°02 CommandeHoussam RekibiNo ratings yet
- TP2 La Régulation TachymétriqueDocument8 pagesTP2 La Régulation TachymétriqueBounegab Youcef75% (4)
- Capteur de NiveauDocument12 pagesCapteur de NiveauAsm MaNo ratings yet
- Fiche TD1Document1 pageFiche TD1Asm MaNo ratings yet
- Tableaux Glacage BoironDocument5 pagesTableaux Glacage BoironJulien Franco0% (2)
- Le Seuil de Rentabilite Exercice CopemDocument2 pagesLe Seuil de Rentabilite Exercice CopemMohammed EL AMRANINo ratings yet
- TD BouchafaaDocument22 pagesTD BouchafaaNadhir Mehellou100% (2)
- Commande en Temps Réel D'un Onduleur Triphasé À Deux NiveauxDocument4 pagesCommande en Temps Réel D'un Onduleur Triphasé À Deux NiveauxAymen Bouali100% (1)
- TP 6 Simulation Montages Redresseurs MatlabDocument9 pagesTP 6 Simulation Montages Redresseurs MatlabOmar AmriNo ratings yet
- 507 Psim tp6 Onduleur Mli PDFDocument9 pages507 Psim tp6 Onduleur Mli PDFKaddouri Kadda50% (2)
- Cours OnduleurDocument4 pagesCours OnduleurAymen Chaaira50% (2)
- TP1 Prise en Main de AutomgenDocument13 pagesTP1 Prise en Main de AutomgenMarouan ChanNo ratings yet
- Examen D'automatique PDFDocument2 pagesExamen D'automatique PDFAchraf Ramouch0% (1)
- TP1 - Modélisation Des MCCDocument2 pagesTP1 - Modélisation Des MCCmajdoub100% (2)
- Compte Rendu - TP - Electronique de PuissanceDocument22 pagesCompte Rendu - TP - Electronique de Puissancemohamed moustaineNo ratings yet
- Upload - Résumé Du Cours-MCC Et Hacheur-2014-2015Document4 pagesUpload - Résumé Du Cours-MCC Et Hacheur-2014-2015Hichem Hamdi100% (3)
- Bendaha TP HADocument65 pagesBendaha TP HAraouf100% (3)
- Chapitre 3Document18 pagesChapitre 3Eya CherbibNo ratings yet
- RedresseurDocument23 pagesRedresseurAnas Kerty50% (4)
- PFE Onduleur HacheurDocument40 pagesPFE Onduleur HacheurYouness Talbi100% (1)
- TP OnduleurDocument5 pagesTP OnduleurAnass TaouFikNo ratings yet
- Cours Pont MixtDocument15 pagesCours Pont MixthafosaamrNo ratings yet
- TP N 02 CommandeDocument5 pagesTP N 02 CommandeAchraf Mohamed BensaadaNo ratings yet
- Asservissement Et Régulation ContinusDocument54 pagesAsservissement Et Régulation ContinusJamii MohamedNo ratings yet
- TPN 1: Variation de Vitesse Du Moteur À Courant Continu Par Action Sur La Résistance Équivalente de L'induit, de La Tension Et Le Champ D'excitationDocument2 pagesTPN 1: Variation de Vitesse Du Moteur À Courant Continu Par Action Sur La Résistance Équivalente de L'induit, de La Tension Et Le Champ D'excitationG - DZ100% (1)
- EP Convertisseurs Chap-4 1 RedresseursDocument40 pagesEP Convertisseurs Chap-4 1 RedresseursZINEB AZ0% (1)
- Cours API L3Document46 pagesCours API L3Badiel MarcNo ratings yet
- 1 Exercice Redressement Triphase Commande PDFDocument4 pages1 Exercice Redressement Triphase Commande PDFbhfgtdNo ratings yet
- TP Moteur Asynchrone TriphaséDocument5 pagesTP Moteur Asynchrone Triphaséharzallah khaled100% (1)
- ElpDocument141 pagesElpHØu ÇîNe100% (1)
- Compte Rendu-MoteurDocument7 pagesCompte Rendu-MoteurAmine CheurfaNo ratings yet
- Simulation RedressementDocument8 pagesSimulation RedressementSEKONI N. Alain100% (4)
- TP1-redressement-monophase Commande Simulation SimulinkDocument4 pagesTP1-redressement-monophase Commande Simulation Simulinkomar ballalouNo ratings yet
- TPs Electronique de PuissanceDocument12 pagesTPs Electronique de Puissancejunior joelNo ratings yet
- Compte Rendu TP3 DIOMEDocument16 pagesCompte Rendu TP3 DIOMELandry NayireNo ratings yet
- Onduleurs Et Variation de Vitesse PSIMDocument21 pagesOnduleurs Et Variation de Vitesse PSIMBALLOUK Soufiane94% (17)
- TD Electronique de Puissance AvancéeDocument5 pagesTD Electronique de Puissance Avancéeaabimouloud2No ratings yet
- TD1 OnduleursDocument2 pagesTD1 OnduleurssofianeNo ratings yet
- TP3 Variation Vitesse Moteur Courant Continu Redressement PD2 PDFDocument7 pagesTP3 Variation Vitesse Moteur Courant Continu Redressement PD2 PDFPatrick BenieNo ratings yet
- Chap 5-Gradateur-20011-BF-OK PDFDocument30 pagesChap 5-Gradateur-20011-BF-OK PDFdaily newsNo ratings yet
- 6 TP Barierre ParkingDocument37 pages6 TP Barierre Parkingamine100% (1)
- TP 01-API .L3 AutomatiqueDocument19 pagesTP 01-API .L3 Automatiqueothmane ABDELADIMNo ratings yet
- Hacheur 4 QuadrantsDocument4 pagesHacheur 4 QuadrantsZied Omar100% (1)
- SimulationDocument10 pagesSimulationKioua Med Sedik100% (2)
- TDs Electronique de Puissance AvancéeDocument18 pagesTDs Electronique de Puissance Avancéeبكر بكرNo ratings yet
- Travaux Dirigés - Convertisseur AC-DCDocument10 pagesTravaux Dirigés - Convertisseur AC-DCredwane ouberri0% (1)
- TP Capteur de PositionDocument3 pagesTP Capteur de PositionAbdeljalil BoulabeizNo ratings yet
- OnduleurDocument17 pagesOnduleurGrine Salah Eddine100% (1)
- Compte Rendu N1 (Moteur Electrique)Document22 pagesCompte Rendu N1 (Moteur Electrique)Khalil homraniNo ratings yet
- Circuit Passifs en Régime Sinusoïdale MonophaséDocument8 pagesCircuit Passifs en Régime Sinusoïdale MonophaséAsma Rguez67% (3)
- TP 01 Onduleur MonophaseDocument1 pageTP 01 Onduleur MonophaseAb CdNo ratings yet
- Exo Corrigé Api CunbDocument10 pagesExo Corrigé Api CunbBOURAS Ihabe - بوراس إيهابNo ratings yet
- L'Électricité - Découvreurs et Inventeurs: Tome IVFrom EverandL'Électricité - Découvreurs et Inventeurs: Tome IVRating: 3 out of 5 stars3/5 (2)
- Tp3 Etude Montages Redresseurs CommandesDocument5 pagesTp3 Etude Montages Redresseurs CommandesDjalal Eddine HammachiNo ratings yet
- Série de TD N1 - 2Document2 pagesSérie de TD N1 - 2jyNo ratings yet
- Série de TD N1Document2 pagesSérie de TD N1jyNo ratings yet
- Solution EX2 Serie 1 PDFDocument5 pagesSolution EX2 Serie 1 PDFSalah EddineNo ratings yet
- Manuel Du CoursDocument122 pagesManuel Du CoursResultats RechercheNo ratings yet
- Examen2 Electronique de Puissance AvancéeDocument19 pagesExamen2 Electronique de Puissance AvancéeGARCIAL TASSENo ratings yet
- TP 02: Intégration Des Capteurs de Lumière Et de Position Dans Un Circuit ÉlectriqueDocument3 pagesTP 02: Intégration Des Capteurs de Lumière Et de Position Dans Un Circuit ÉlectriqueAsm Ma100% (1)
- Moteur Relais Et TransistorDocument8 pagesMoteur Relais Et Transistorsoufiane_nassefNo ratings yet
- Matlab IntroDocument32 pagesMatlab IntroImed BarçaNo ratings yet
- TP Modelisation - Proteus Preactionneur Et Actionneur Electrique NomsDocument6 pagesTP Modelisation - Proteus Preactionneur Et Actionneur Electrique NomsAsm MaNo ratings yet
- ProgrammeDocument2 pagesProgrammeAsm MaNo ratings yet
- Regulation de TemperatureDocument5 pagesRegulation de TemperatureAsm Ma100% (1)
- Brochure Régulation PDFDocument56 pagesBrochure Régulation PDFAsm MaNo ratings yet
- TP Modelisation - Proteus Preactionneur Et Actionneur Electrique NomsDocument6 pagesTP Modelisation - Proteus Preactionneur Et Actionneur Electrique NomsAsm MaNo ratings yet
- Cours Regulation Industrielle Avec ExercDocument59 pagesCours Regulation Industrielle Avec Exerckwamo emileNo ratings yet
- Andromede Bourchardon 2003 PDFDocument28 pagesAndromede Bourchardon 2003 PDFAsm MaNo ratings yet
- TP2Document4 pagesTP2Asm Ma100% (1)
- Chapitre 1Document22 pagesChapitre 1Asm MaNo ratings yet
- ProgrammeDocument2 pagesProgrammeAsm MaNo ratings yet
- Mach-Chapitre - 2b - Moteur Asynchrone PDFDocument16 pagesMach-Chapitre - 2b - Moteur Asynchrone PDFAsm MaNo ratings yet
- Commande Des Systèmes Non Linéaires Par Mode Glissant Flou Avec Gain AdaptatifDocument6 pagesCommande Des Systèmes Non Linéaires Par Mode Glissant Flou Avec Gain AdaptatifAsm MaNo ratings yet
- Chapitre 1Document22 pagesChapitre 1Asm MaNo ratings yet
- CapteursDocument12 pagesCapteursMôhãmêd BèñNo ratings yet
- TP Machine1 1Document3 pagesTP Machine1 1Souhaib Louda100% (2)
- 598 Presentation Logique FloueDocument3 pages598 Presentation Logique FloueNaas DjeddaouiNo ratings yet
- TP 04: Generatrices A Cournt ContinuDocument1 pageTP 04: Generatrices A Cournt ContinuAsm MaNo ratings yet
- 3 Conference PR Abdallaoui TAPC Juin 2011Document67 pages3 Conference PR Abdallaoui TAPC Juin 2011Asm MaNo ratings yet
- TP Elechtroticnique2Document2 pagesTP Elechtroticnique2Asm MaNo ratings yet
- Rhéostat de DémarrageDocument2 pagesRhéostat de DémarrageAsm Ma100% (1)
- ProgrammeDocument1 pageProgrammeAsm MaNo ratings yet
- Mach-Chapitre - 2b - Moteur Asynchrone PDFDocument16 pagesMach-Chapitre - 2b - Moteur Asynchrone PDFAsm MaNo ratings yet
- Cours Cycle de Vie 2Document100 pagesCours Cycle de Vie 2slimamriNo ratings yet
- Foulées D'imphy 2019Document5 pagesFoulées D'imphy 2019Le Journal du CentreNo ratings yet
- Cours DeterminantDocument7 pagesCours Determinanttarek gritliNo ratings yet
- Cataělogo Fassi 175 PDFDocument24 pagesCataělogo Fassi 175 PDFSebastian AcevedoNo ratings yet
- Pole 1-1Document2 pagesPole 1-1Sabhrya CorbonNo ratings yet
- Autoscale Juin2008Document4 pagesAutoscale Juin2008acr_2767401No ratings yet
- Guide Programmation Chambre Dhopital APHPDocument59 pagesGuide Programmation Chambre Dhopital APHPAbigail AbbyNo ratings yet
- Pierre Leyssenne LA PREMIERE ANNEE D'ARITHMETIQUE Librairie Armand Colin Paris 1915Document148 pagesPierre Leyssenne LA PREMIERE ANNEE D'ARITHMETIQUE Librairie Armand Colin Paris 1915francis batt100% (1)
- Réglementation TunisienneDocument14 pagesRéglementation TunisienneEya AbdallahNo ratings yet
- Ensemencement D'une Galarie API 20Document50 pagesEnsemencement D'une Galarie API 20alphonse1988100% (3)
- Cours D-Astrologie 1-2 PDFDocument8 pagesCours D-Astrologie 1-2 PDFmo50% (2)
- Textes Berbères de L'aurès (Parler Des Ait Frah) - André Basset 1961Document365 pagesTextes Berbères de L'aurès (Parler Des Ait Frah) - André Basset 1961idlisen100% (8)
- SVTDocument3 pagesSVTCheikh DiaNo ratings yet
- Guide Additif Tous Les Noms, Famille, HallalDocument12 pagesGuide Additif Tous Les Noms, Famille, Hallalgaggg0% (1)
- Mur en Béton ArmeDocument24 pagesMur en Béton ArmenidhalNo ratings yet
- Recette Roulés de Jambon Au Beurre de Poireaux GratinésDocument9 pagesRecette Roulés de Jambon Au Beurre de Poireaux GratinésAmina EL HALFINo ratings yet
- Lecon 1 12Document6 pagesLecon 1 12papillon116No ratings yet
- M. FAYE-TD Cinematique Du PointDocument3 pagesM. FAYE-TD Cinematique Du PointDabo100% (1)
- Image Discrimination Visuelle: Question de CompréhensionDocument6 pagesImage Discrimination Visuelle: Question de CompréhensioncazottesNo ratings yet
- 2001 Sept PT1Document19 pages2001 Sept PT1HamydNo ratings yet
- Psycho Slides Stat L3 S6Document76 pagesPsycho Slides Stat L3 S6Bvictor Boni100% (1)
- L'economie de La Cote D'ivoirDocument6 pagesL'economie de La Cote D'ivoirballa pierre koivoguiNo ratings yet
- Documentation Volkswagen New BeetleDocument19 pagesDocumentation Volkswagen New Beetlecristi botezNo ratings yet
- FR Comment Changer Bobines Dallumage Sur BMW x6 E71 E72 Guide de RemplacementDocument12 pagesFR Comment Changer Bobines Dallumage Sur BMW x6 E71 E72 Guide de RemplacementVictor KessougboNo ratings yet
- L'anémie RegimeDocument7 pagesL'anémie Regimebendjillali youcefNo ratings yet
- SG EuDocument164 pagesSG EuSander SwinnenNo ratings yet
- Atelier Ouvrage D'artDocument26 pagesAtelier Ouvrage D'art3 éme infraNo ratings yet
- Yves Tissier - Etre-Vegetarien - Le-Bon-ChoixDocument245 pagesYves Tissier - Etre-Vegetarien - Le-Bon-ChoixKabiéssi ODOUDEYNo ratings yet