You might also like
- Amplificadores RealimentadosDocument16 pagesAmplificadores RealimentadosRolando Choque CahuanaNo ratings yet
- Preinforme de Lab de Oscilador de Desplazamiento de FaseDocument5 pagesPreinforme de Lab de Oscilador de Desplazamiento de FaseDavid Ajhuacho IncaNo ratings yet
- INFORME Final Practica 5Document9 pagesINFORME Final Practica 5SCNo ratings yet
- Tercera Fase PDFDocument28 pagesTercera Fase PDFDiego LazoNo ratings yet
- Cap 03 Modulacion AM2Document21 pagesCap 03 Modulacion AM2albertwillyNo ratings yet
- INFORME FINAL Nº4 - Sistemas DigitalesDocument21 pagesINFORME FINAL Nº4 - Sistemas DigitalesMARIO ALBERTO CCOYORI MENDOZANo ratings yet
- Modulación y Demodulación PMDocument7 pagesModulación y Demodulación PMIvan Anaya (INTHEPROD)No ratings yet
- Sem 14 Ce Ii Realimentacion Serie ParaleloDocument28 pagesSem 14 Ce Ii Realimentacion Serie ParaleloAnel MendozaNo ratings yet
- Resonancia Serie - ParaleloDocument10 pagesResonancia Serie - ParaleloDavis KailNo ratings yet
- Laboratorio 10 Amplificador Realimentado, Configuración Derivación SerieDocument12 pagesLaboratorio 10 Amplificador Realimentado, Configuración Derivación SerieJessica FernandezNo ratings yet
- Demodulador FSK Mediante PLLDocument11 pagesDemodulador FSK Mediante PLLE Paolo Carbajal CNo ratings yet
- Problemas Propuestos 2018-2Document4 pagesProblemas Propuestos 2018-2Jhoelito KennedyNo ratings yet
- Oscilador Puente de WienDocument3 pagesOscilador Puente de WienAlex MartinezNo ratings yet
- Practica 8 EDDocument12 pagesPractica 8 EDChaavin RvNo ratings yet
- Laboratorio DarligtonDocument6 pagesLaboratorio DarligtonLinda VanegasNo ratings yet
- PLL 4046Document9 pagesPLL 4046exeluc75100% (1)
- FinalPractica 1 Neira Sisa EdyyDocument33 pagesFinalPractica 1 Neira Sisa EdyySantiNeiraNo ratings yet
- Preguntas y Problemas - TeoriaDocument6 pagesPreguntas y Problemas - TeoriaJosue Marcelo ChavarriaNo ratings yet
- Tomasi Cap 2Document2 pagesTomasi Cap 2LuisYolmanPalacios50% (2)
- InforMe Electronicos 2Document5 pagesInforMe Electronicos 2miltonNo ratings yet
- Amplificadores SintonizadosDocument5 pagesAmplificadores SintonizadosGiuseppe Mateus33% (3)
- PDF Demodulador FSK Con PLL DDDocument3 pagesPDF Demodulador FSK Con PLL DDAndres TolozaNo ratings yet
- Introducción A Los Sistemas DiscretosDocument17 pagesIntroducción A Los Sistemas DiscretosGustavo Rico RasgadoNo ratings yet
- Primera Práctica2 PDFDocument3 pagesPrimera Práctica2 PDFCaptain UnderoosNo ratings yet
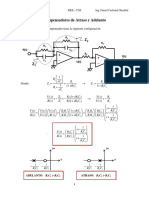
- Mezcladores Activos WordDocument5 pagesMezcladores Activos WordBenjhy Brian Matheus QuispeNo ratings yet
- Respuesta en FrecuenciaDocument10 pagesRespuesta en Frecuenciacarlos maldonadoNo ratings yet
- Cuantificacion No LinealDocument10 pagesCuantificacion No LinealNathyFer VásquezNo ratings yet
- Qué Es El Índice de ModulaciónDocument8 pagesQué Es El Índice de Modulacióngedress0767% (6)
- Amplificador RealimentadoDocument13 pagesAmplificador Realimentadojacho16No ratings yet
- 17 Dispositivos de Disparo Ujt y PutDocument9 pages17 Dispositivos de Disparo Ujt y PutRicardo LopezNo ratings yet
- Desarrollo Del NE602-SA6012Document3 pagesDesarrollo Del NE602-SA6012Mayra LeonNo ratings yet
- Parcial de Comunicaciones IIDocument5 pagesParcial de Comunicaciones IIIsabel Kaulitz CedeñoNo ratings yet
- Principio Operacion OsciladoresDocument15 pagesPrincipio Operacion Osciladoresrjavier001No ratings yet
- Guia 3Document4 pagesGuia 3Kevin Ascue Contreras0% (2)
- Codificador de Redundancia Cíclica de 8 Bits en FPGADocument2 pagesCodificador de Redundancia Cíclica de 8 Bits en FPGAJuancho's MuñozNo ratings yet
- Digitales Final Lacth Flip FlopDocument4 pagesDigitales Final Lacth Flip FlopMauro MANo ratings yet
- Práctica 7 PLL Como Sintetizador de FrecuenciasDocument7 pagesPráctica 7 PLL Como Sintetizador de FrecuenciasDavid GomezNo ratings yet
- Generador Diente de SierraDocument3 pagesGenerador Diente de SierraLuis Carlos OrtegaNo ratings yet
- Las Fijas SCDDocument18 pagesLas Fijas SCDjonathan harold quevedo pulido100% (1)
- A.C en F Prac 2Document9 pagesA.C en F Prac 2Arthur SánchezNo ratings yet
- Señales de Bajo Nivel y Espurias en Análisis EspectralDocument5 pagesSeñales de Bajo Nivel y Espurias en Análisis Espectralploter98No ratings yet
- Deber01 - SistemasComunicaciones 1 - 27octubre2020Document1 pageDeber01 - SistemasComunicaciones 1 - 27octubre2020IsaacMoraOñateNo ratings yet
- Líneas de MicrocintasDocument6 pagesLíneas de MicrocintasthutasannNo ratings yet
- Informe Del Filtro Paso BandaDocument6 pagesInforme Del Filtro Paso BandaHopper JavierNo ratings yet
- Informe Espejos de CorrienteDocument4 pagesInforme Espejos de CorrienteIvan Andres MuñozNo ratings yet
- CP ST Practica-N6Document7 pagesCP ST Practica-N6SOLIS TIPIAN MARTÍN ALBINONo ratings yet
- If4 Digitales Ee635 N1Document7 pagesIf4 Digitales Ee635 N1Salazar LenoxNo ratings yet
- Sintesis Foster Z LCDocument2 pagesSintesis Foster Z LCAugusto Rodrigo GomezNo ratings yet
- Moduladores Ask, FSK, PSKDocument7 pagesModuladores Ask, FSK, PSKAndres NavasNo ratings yet
- Temas para Los 6 GruposDocument6 pagesTemas para Los 6 Gruposjesus alainNo ratings yet
- Labo 3Document5 pagesLabo 3Luis Alva FuertesNo ratings yet
- Lista de Ejercicios EL01 2015-2Document22 pagesLista de Ejercicios EL01 2015-2LuisLuisHcNo ratings yet
- Informe Previo 4 Circuitos AritmeticosDocument8 pagesInforme Previo 4 Circuitos AritmeticosGhozt14891No ratings yet
- S Pro Electromag1Document125 pagesS Pro Electromag1Julian David DelgadoNo ratings yet
- CFA's y VFA'sDocument2 pagesCFA's y VFA'sLuis CuadradoNo ratings yet
- Construcción de La Carta de SmithDocument6 pagesConstrucción de La Carta de SmithCM EdwinNo ratings yet
- SeriesDocument23 pagesSerieschupamelapijaNo ratings yet
- Fallas de 2 Fases A TierraDocument10 pagesFallas de 2 Fases A TierraAlexander MassacheNo ratings yet
- Analisis de La Respuesta TransitoriaDocument17 pagesAnalisis de La Respuesta TransitoriaEruiza35No ratings yet
- Simulagro de RM para BelaundeDocument2 pagesSimulagro de RM para Belaundemarco poloNo ratings yet
- Examen de Segundo Aritmetica Colegio IngenieriaDocument2 pagesExamen de Segundo Aritmetica Colegio Ingenieriamarco poloNo ratings yet
- REGLA de INTERÉS Clase de Aritmetica de Condevilla Tercer Grado SecundariaDocument15 pagesREGLA de INTERÉS Clase de Aritmetica de Condevilla Tercer Grado Secundariamarco poloNo ratings yet
- Examen de Aritmetica de 1ero de Secundaria de Colegio IngenieriaDocument2 pagesExamen de Aritmetica de 1ero de Secundaria de Colegio Ingenieriamarco poloNo ratings yet
- Estadistica UcsurDocument9 pagesEstadistica Ucsurmarco poloNo ratings yet
- 2232Document2 pages2232marco polo100% (1)
- Formación Etica Contra El HostigamientoDocument9 pagesFormación Etica Contra El Hostigamientomarco poloNo ratings yet
- Silabo Proyecto Tesis I - 19aDocument6 pagesSilabo Proyecto Tesis I - 19amarco poloNo ratings yet
- Titulo de Tesis Marco PoloDocument2 pagesTitulo de Tesis Marco Polomarco poloNo ratings yet
- Realimentacion Sobre Los Amplificadores (2) - s9-bDocument22 pagesRealimentacion Sobre Los Amplificadores (2) - s9-bmarco poloNo ratings yet
- Generadores MonoetapaDocument37 pagesGeneradores Monoetapamarco poloNo ratings yet
- Compensadores Clases Ee616Document32 pagesCompensadores Clases Ee616louisNo ratings yet
- Taller 1 - Estadística DescriptivaDocument5 pagesTaller 1 - Estadística DescriptivaCDurango100% (1)
- Diagramas Eh PHDocument6 pagesDiagramas Eh PHcuenta123321No ratings yet
- 11 Pa Química Undécimo Pi 2020Document2 pages11 Pa Química Undécimo Pi 2020Mateo VeraNo ratings yet
- Funciones de Una VariableDocument7 pagesFunciones de Una VariablefranciscoNo ratings yet
- Metodo de Integracion DIRECTADocument21 pagesMetodo de Integracion DIRECTAFort CruzNo ratings yet
- Mpi 2 - Sol Sem 17 PDFDocument6 pagesMpi 2 - Sol Sem 17 PDFleslieNo ratings yet
- Medidas de Tendencia Central - FinalDocument3 pagesMedidas de Tendencia Central - Finalelmer roger larota espinoza50% (6)
- Guia Plano Cartesiano Funcion Afin y LinealDocument8 pagesGuia Plano Cartesiano Funcion Afin y LinealCarolina Isabel Garcia MendozaNo ratings yet
- Informe de EDPDocument45 pagesInforme de EDPkatrin vasquez aquino100% (1)
- Método SimplexDocument7 pagesMétodo SimplexMei Yu WengNo ratings yet
- Pauta - Prueba - 3 Calculo III Ingenieria CivilDocument5 pagesPauta - Prueba - 3 Calculo III Ingenieria CivilAlberto Rojas OlivaresNo ratings yet
- Formato Plan de Asignatura 1 2023Document32 pagesFormato Plan de Asignatura 1 2023Julio UgarteNo ratings yet
- ConfiabilidadDocument18 pagesConfiabilidadAlirio TuaNo ratings yet
- Algoritmos para Hallar o Aproximar El Valor de PiDocument4 pagesAlgoritmos para Hallar o Aproximar El Valor de PiRoberth Campos PorrasNo ratings yet
- APE 3 Series de PotenciaDocument3 pagesAPE 3 Series de PotenciaEsteban EspinozaNo ratings yet
- Mapa MentalDocument1 pageMapa MentalJoel RodríguezNo ratings yet
- Integrales DoblesDocument50 pagesIntegrales DoblesAinaraNo ratings yet
- Correlacion y Regresion LinealDocument9 pagesCorrelacion y Regresion LinealAmir Ryan Chavez BernardoNo ratings yet
- Taller 1Document6 pagesTaller 1Daniela Sofia Correa GarciaNo ratings yet
- Integración Por Sustitución TrigonométricaDocument20 pagesIntegración Por Sustitución TrigonométricaCharles D Damasso100% (1)
- 1.4 - Medidas de Tendencia CentralDocument8 pages1.4 - Medidas de Tendencia CentralAnderson Jesús Espinoza TunyNo ratings yet
- Practica 5 Destilacion.Document13 pagesPractica 5 Destilacion.Neftali Vargas MandujanoNo ratings yet
- Expo Tele 1 - FourierDocument15 pagesExpo Tele 1 - Fourierjames chavezNo ratings yet
- Problemas Química Concentraciones 1 - 5Document5 pagesProblemas Química Concentraciones 1 - 5O Peto LaretoNo ratings yet
- Aplicación de La Metodología 8DDocument17 pagesAplicación de La Metodología 8DAxel Gustavo Delgado PazNo ratings yet
- Ecuaciones Diferenciales No LinealesDocument37 pagesEcuaciones Diferenciales No LinealesAlex Ivan Marca MaqueraNo ratings yet
- 3 - Lamina Gráficos EstadísticosDocument1 page3 - Lamina Gráficos EstadísticosNeisser Arturo Soto FernándezNo ratings yet
- Parametros CromatograficosDocument11 pagesParametros CromatograficosAngelica TorresNo ratings yet
- Power BiDocument35 pagesPower BiArmando CarrilloNo ratings yet