You might also like
- AI.1 - Introduction To AI (1-4)Document71 pagesAI.1 - Introduction To AI (1-4)Le NhatNo ratings yet
- Key Management and DistributionDocument6 pagesKey Management and Distributiongraduation projectNo ratings yet
- Empirical Mode Decomposition: An Analytical Approach For Sifting ProcessDocument5 pagesEmpirical Mode Decomposition: An Analytical Approach For Sifting ProcessPablo LlariaNo ratings yet
- Zhang Miccai 2012Document8 pagesZhang Miccai 2012marcniethammerNo ratings yet
- Image Analysis by Bidimensional Empirical Mode DecompositionDocument8 pagesImage Analysis by Bidimensional Empirical Mode DecompositionhrishikeshanandNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document5 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Work ReportDocument13 pagesWork Reportmorris gichuhiNo ratings yet
- Accuracy of Sine-Wave Frequency Estimation by An Iterative Interpolated DFT AlgorithmDocument6 pagesAccuracy of Sine-Wave Frequency Estimation by An Iterative Interpolated DFT AlgorithmKassaye GizawNo ratings yet
- Article 2d VMD EmmcvprDocument13 pagesArticle 2d VMD EmmcvprJean-ChristopheCexusNo ratings yet
- Research On PD Signals Denoising Based On EMD Method: Yao PEI, Yangang WU, Dacheng JIADocument4 pagesResearch On PD Signals Denoising Based On EMD Method: Yao PEI, Yangang WU, Dacheng JIAThuc VuNo ratings yet
- Adaptive Mixed Norm Optical Flow Estimation Vcip 2005Document8 pagesAdaptive Mixed Norm Optical Flow Estimation Vcip 2005ShadowNo ratings yet
- Image Fusion Using Empirical Mode DecompositionDocument57 pagesImage Fusion Using Empirical Mode DecompositionSakthipriya ShanmughamNo ratings yet
- Abstrac 1Document4 pagesAbstrac 1morris gichuhiNo ratings yet
- Fast Exact Euclidean Distance (FEED) : A New Class of Adaptable Distance TransformsDocument14 pagesFast Exact Euclidean Distance (FEED) : A New Class of Adaptable Distance TransformsMahdi HassanNo ratings yet
- Real Time Ultrasound Image DenoisingDocument14 pagesReal Time Ultrasound Image DenoisingjebileeNo ratings yet
- An Object-Based Method For Rician Noise Estimation in MR ImagesDocument8 pagesAn Object-Based Method For Rician Noise Estimation in MR ImagesRicardo FerrariNo ratings yet
- ArticleDocument12 pagesArticleAbdelkader HoumitaNo ratings yet
- Fast Curvature Matrix-Vector Products For Second-Order Gradient DescentDocument16 pagesFast Curvature Matrix-Vector Products For Second-Order Gradient DescentKitanovic NenadNo ratings yet
- Politecnico Di Torino Porto Institutional RepositoryDocument12 pagesPolitecnico Di Torino Porto Institutional RepositoryMauricio RamosNo ratings yet
- 1 s2.0 S1876610216309729 MainDocument8 pages1 s2.0 S1876610216309729 MainIndir JaganjacNo ratings yet
- IAP Chapter5 2012Document121 pagesIAP Chapter5 2012Nguyễn Duy QuangNo ratings yet
- A Novel Wavelet Based Threshold Selection Technique For Image DenoisingDocument4 pagesA Novel Wavelet Based Threshold Selection Technique For Image DenoisingjebileeNo ratings yet
- Imaging System Fundamentals: Gerald C. HolstDocument11 pagesImaging System Fundamentals: Gerald C. Holstasanamikasingh8No ratings yet
- A Proposed Hybrid Algorithm For Video Denoisng Using Multiple Dimensions of Fast Discrete Wavelet TransformDocument8 pagesA Proposed Hybrid Algorithm For Video Denoisng Using Multiple Dimensions of Fast Discrete Wavelet TransformInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 1 s2.0 S2212017312005476 MainDocument6 pages1 s2.0 S2212017312005476 MainAbdelkader RabahNo ratings yet
- Multidimensional Hybrid Modulations For Ultrahigh-Speed Optical TransportDocument10 pagesMultidimensional Hybrid Modulations For Ultrahigh-Speed Optical TransportKazi Rizwanul HoqNo ratings yet
- 2009 ICNDENuclear Dupond SCCCiva-Athena ENDocument8 pages2009 ICNDENuclear Dupond SCCCiva-Athena ENHyujeii MceNo ratings yet
- Structural and Diffusion Processing MethodsDocument3 pagesStructural and Diffusion Processing Methodsrozo_asterNo ratings yet
- Improved Image Denoising Technique Using Neighboring Wavelet Coefficients of Optimal Wavelet With Adaptive ThresholdingDocument6 pagesImproved Image Denoising Technique Using Neighboring Wavelet Coefficients of Optimal Wavelet With Adaptive ThresholdingjebileeNo ratings yet
- Suresh Kumar Dash: Term Paper - Scientific Computing (MA-579H)Document6 pagesSuresh Kumar Dash: Term Paper - Scientific Computing (MA-579H)suresh dashNo ratings yet
- Wavelet PDFDocument5 pagesWavelet PDFvlsivirusNo ratings yet
- A Gamma-Convergence Applied To Multispectral Image Classification and RestorationDocument6 pagesA Gamma-Convergence Applied To Multispectral Image Classification and RestorationJude AveryNo ratings yet
- EPWTDocument5 pagesEPWTyazeed7079875No ratings yet
- Iris & Face Verification Using Decision Level Fusion TechniqueDocument5 pagesIris & Face Verification Using Decision Level Fusion TechniqueLarbi NouarNo ratings yet
- BEM Methods For Acoustic and Vibroacoustic Problems in LS-DYNADocument8 pagesBEM Methods For Acoustic and Vibroacoustic Problems in LS-DYNAdasfasdNo ratings yet
- Blind Image Seperation Using Forward Difference Method (FDM)Document7 pagesBlind Image Seperation Using Forward Difference Method (FDM)sipijNo ratings yet
- Application of Finite Difference Time Domain To Calculate The Transmission Coefficient of An Electromagnetic Wave Impinging Perpendicularly On A Dielectric Interface With Modified MUR-I ABCDocument8 pagesApplication of Finite Difference Time Domain To Calculate The Transmission Coefficient of An Electromagnetic Wave Impinging Perpendicularly On A Dielectric Interface With Modified MUR-I ABCrymnikskiNo ratings yet
- Directional Dipole For Subsurface Scattering in Translucent MaterialsDocument8 pagesDirectional Dipole For Subsurface Scattering in Translucent Materials汪听No ratings yet
- A Security Enhanced Robust Steganography Algorithm For Data HidingDocument9 pagesA Security Enhanced Robust Steganography Algorithm For Data HidingKristen TurnerNo ratings yet
- FEM - 1 Introduction PDFDocument23 pagesFEM - 1 Introduction PDFwiyorejesend22u.infoNo ratings yet
- An Object Recognition and Identification System Using The Hough Transform MethodDocument4 pagesAn Object Recognition and Identification System Using The Hough Transform Methodover related2No ratings yet
- Discriminant Pattern Recognition Using Transformation Invariant NeuronsDocument16 pagesDiscriminant Pattern Recognition Using Transformation Invariant NeuronssasddasdaNo ratings yet
- Dragomir Et Ski y 2014Document14 pagesDragomir Et Ski y 2014kalokosNo ratings yet
- Silva 2018Document25 pagesSilva 2018Rodrigo VasconcelosNo ratings yet
- (Recursive Sparse, Spatiotemporal Coding)Document6 pages(Recursive Sparse, Spatiotemporal Coding)vanhouten777No ratings yet
- Research On Wavelet Image Threshold De-Noising: Chenggang Zhen Yingmei SuDocument4 pagesResearch On Wavelet Image Threshold De-Noising: Chenggang Zhen Yingmei SujebileeNo ratings yet
- An Efficient High-Order Algorithm For Scattering by Inhomogeneous Penetrable MediaDocument206 pagesAn Efficient High-Order Algorithm For Scattering by Inhomogeneous Penetrable MediaHari Madhavan Krishna KumarNo ratings yet
- Haar WaveletsDocument3 pagesHaar WaveletsMihai DragomirNo ratings yet
- Rudin Osher FatemiDocument10 pagesRudin Osher FatemiSrikant Kamesh IyerNo ratings yet
- Gesture Recognition Using Image Comparison MethodsDocument5 pagesGesture Recognition Using Image Comparison MethodsSiddharth JainNo ratings yet
- Color Video Denoising Using 3D Framelet TransformDocument8 pagesColor Video Denoising Using 3D Framelet TransformInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Upwind Difference Schemes For Hyperbolic Systems of Conservation LawsDocument36 pagesUpwind Difference Schemes For Hyperbolic Systems of Conservation LawsbaubaumihaiNo ratings yet
- Fast Multivariate Empirical Mode Decomposition: IEEE Access October 2018Document18 pagesFast Multivariate Empirical Mode Decomposition: IEEE Access October 2018Rhama DiantoNo ratings yet
- DownloadDocument12 pagesDownloadp29977434No ratings yet
- Research PapersDocument18 pagesResearch PapersMuhammad ShahidNo ratings yet
- An IDL/ENVI Implementation of The FFT-based Algorithm For Automatic Image RegistrationDocument11 pagesAn IDL/ENVI Implementation of The FFT-based Algorithm For Automatic Image RegistrationLavanya_Ashok_9888No ratings yet
- Real Time Ultrasound Image DenoisingDocument8 pagesReal Time Ultrasound Image DenoisingjebileeNo ratings yet
- Neural Networks-Based Backward Scheme For Fully Nonlinear PdesDocument24 pagesNeural Networks-Based Backward Scheme For Fully Nonlinear PdesAman JalanNo ratings yet
- 2015-Estimation of Turbulence Strength Anisotropy Outer Scale and Spectral Slope From An LED ArrayDocument8 pages2015-Estimation of Turbulence Strength Anisotropy Outer Scale and Spectral Slope From An LED ArrayJharlanRiveroNo ratings yet
- Optical Flow: Exploring Dynamic Visual Patterns in Computer VisionFrom EverandOptical Flow: Exploring Dynamic Visual Patterns in Computer VisionNo ratings yet
- Dynamic_clustering_equivalent_model_of_wind_turbinDocument17 pagesDynamic_clustering_equivalent_model_of_wind_turbinkaoutarNo ratings yet
- Implementation_and_Validation_of_an_Adaptive_FuzzyDocument19 pagesImplementation_and_Validation_of_an_Adaptive_FuzzykaoutarNo ratings yet
- 125997044-1Document8 pages125997044-1kaoutarNo ratings yet
- wind-03-00030-v2-1Document3 pageswind-03-00030-v2-1kaoutarNo ratings yet
- 1456-1-6701-1-10-20210323-1Document8 pages1456-1-6701-1-10-20210323-1kaoutarNo ratings yet
- buildings-12-01003-v2-1Document16 pagesbuildings-12-01003-v2-1kaoutarNo ratings yet
- energies-13-04152Document39 pagesenergies-13-04152kaoutarNo ratings yet
- Real Time Eeg Signal Processing Based On Ti S tms320c6713 DSKDocument9 pagesReal Time Eeg Signal Processing Based On Ti S tms320c6713 DSKkaoutarNo ratings yet
- Voltage Sag Mitigation with Repetitive Controlled Dynamic Voltage RestorerDocument69 pagesVoltage Sag Mitigation with Repetitive Controlled Dynamic Voltage RestorerkaoutarNo ratings yet
- Paper 73Document6 pagesPaper 73kaoutarNo ratings yet
- Signal Generation Using TMS320C6713 ProcessorDocument5 pagesSignal Generation Using TMS320C6713 ProcessorkaoutarNo ratings yet
- Opencl 2ppDocument28 pagesOpencl 2ppkaoutarNo ratings yet
- MainPaper PallabDocument6 pagesMainPaper PallabkaoutarNo ratings yet
- Mpsoc Architectures OpenmpDocument35 pagesMpsoc Architectures OpenmpkaoutarNo ratings yet
- Median Filter Using Nios Ii Processor With Sort Hardware AcceleratorDocument87 pagesMedian Filter Using Nios Ii Processor With Sort Hardware AcceleratorkaoutarNo ratings yet
- A Jump Start To Opencl: March 15, 2009 Cis 565/665 - Gpu Computing and ArchitectureDocument74 pagesA Jump Start To Opencl: March 15, 2009 Cis 565/665 - Gpu Computing and ArchitecturekaoutarNo ratings yet
- Citation 221305915Document1 pageCitation 221305915kaoutarNo ratings yet
- Dataset Indonesia Untuk Analisis SentimenDocument7 pagesDataset Indonesia Untuk Analisis Sentimenzulfikry arintoNo ratings yet
- DiscreteOptimization2023 Homework1Document2 pagesDiscreteOptimization2023 Homework1tirelli.aliceNo ratings yet
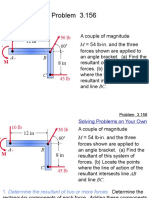
- Problem 3.156: 30 LB 10 LBDocument7 pagesProblem 3.156: 30 LB 10 LBCurt De CastroNo ratings yet
- CONSYSDocument3 pagesCONSYSADITYA MATHURNo ratings yet
- Digital Signal Processing: Chapter 5: IIR Digital Filter DesignDocument156 pagesDigital Signal Processing: Chapter 5: IIR Digital Filter DesignNguyễn Quốc TrungNo ratings yet
- Ciancone Tuning MethodDocument46 pagesCiancone Tuning MethodNazif JaafarNo ratings yet
- 63 General Probability RulesDocument39 pages63 General Probability RulesJoy KathleenNo ratings yet
- Case 10 Taco Bell ProdmanDocument7 pagesCase 10 Taco Bell ProdmanChlover VillanuevaNo ratings yet
- Unit - 6 P, NP, and NP-CompleteDocument26 pagesUnit - 6 P, NP, and NP-Complete21311a1993No ratings yet
- Cryptography and Network Security: Seventh Edition by William StallingsDocument37 pagesCryptography and Network Security: Seventh Edition by William StallingsMillen MarbunNo ratings yet
- Find Out How Many Types of Recursive Algorithm That You Can FindDocument10 pagesFind Out How Many Types of Recursive Algorithm That You Can FindYuyun JoeNo ratings yet
- Reject Allowance Problem - 2 ProblemsDocument17 pagesReject Allowance Problem - 2 ProblemsMaher M. AqrabawiNo ratings yet
- Kuliah 8Document15 pagesKuliah 8Yuriska Destania EncaNo ratings yet
- Partial Differential Equations-IDocument33 pagesPartial Differential Equations-IAnkit ChatterjeeNo ratings yet
- Control Systems UNIT 3 Stability Analysis: Ripal PatelDocument42 pagesControl Systems UNIT 3 Stability Analysis: Ripal PatelPulkit SinghNo ratings yet
- M .Ai A: A I 101 F W - C O AI A Vip Ai 101 C SDocument22 pagesM .Ai A: A I 101 F W - C O AI A Vip Ai 101 C Smehmet nedimNo ratings yet
- BITS Pilani: Digital Signal ProcessingDocument7 pagesBITS Pilani: Digital Signal ProcessingNeha PachauriNo ratings yet
- A Modest Thesis DraftDocument155 pagesA Modest Thesis DraftJonathan ChangNo ratings yet
- Module 8 Inventory Excel TemplateDocument17 pagesModule 8 Inventory Excel TemplateENIDNo ratings yet
- Timetable ILPDocument6 pagesTimetable ILPJimmy López PortilloNo ratings yet
- Process Management (Part 1) : Klara Nahrstedt Spring 2008Document15 pagesProcess Management (Part 1) : Klara Nahrstedt Spring 2008Vijay KumarNo ratings yet
- Spatial Clustering Algorithms - An Overview: Bindiya M VargheseDocument8 pagesSpatial Clustering Algorithms - An Overview: Bindiya M VargheseDiego Ignacio Garcia JuradoNo ratings yet
- Risk Analysis in Capital Budgeting: - Reading: Chapter 9 (Textbook) - Case Study: Sneakers 2013Document31 pagesRisk Analysis in Capital Budgeting: - Reading: Chapter 9 (Textbook) - Case Study: Sneakers 2013SuperGuyNo ratings yet
- Controlling The Solution of Linear Systems - FenicsprojectDocument6 pagesControlling The Solution of Linear Systems - FenicsprojectXu MoranNo ratings yet
- Post Op Weka Data Set Sample PDFDocument8 pagesPost Op Weka Data Set Sample PDFSabaniNo ratings yet
- Top 10 Books On Artificial IntelligenceDocument8 pagesTop 10 Books On Artificial IntelligenceZinny WorldNo ratings yet
- Profit HRDocument369 pagesProfit HRseminarskiiNo ratings yet
- Assignment 5: Unit 7 - Week 5Document6 pagesAssignment 5: Unit 7 - Week 5cse_julieNo ratings yet