You might also like
- Make Her Make MoveDocument32 pagesMake Her Make MoveAlfredo GomezNo ratings yet
- Semantics-Ms. Minh TamDocument15 pagesSemantics-Ms. Minh TamMy Tran100% (2)
- Switching Regression Models and Fuzzy Clustering: Richard CDocument10 pagesSwitching Regression Models and Fuzzy Clustering: Richard CAli Umair KhanNo ratings yet
- The Econometric SocietyDocument16 pagesThe Econometric SocietyAdriana SenaNo ratings yet
- 1 s2.0 S0377042714002775 MainDocument13 pages1 s2.0 S0377042714002775 MainFaria RahimNo ratings yet
- Keywords Ključne Reči: Radetomic@ppt - Co.rsDocument6 pagesKeywords Ključne Reči: Radetomic@ppt - Co.rsmedica101No ratings yet
- A Predator-Prey System Involving Group Defense: A Connection Matrix ApproachDocument15 pagesA Predator-Prey System Involving Group Defense: A Connection Matrix ApproachgrossoNo ratings yet
- Stress Characteristics of Unidirectional Composites With Triple Surface NotchesDocument8 pagesStress Characteristics of Unidirectional Composites With Triple Surface NotchesSarfaraz AlamNo ratings yet
- On Kernel-Target AlignmentDocument7 pagesOn Kernel-Target AlignmentJônatas Oliveira SilvaNo ratings yet
- Institute of Mathematical StatisticsDocument12 pagesInstitute of Mathematical StatisticsSayoni BanerjeeNo ratings yet
- The Asymptotic Covariance Matrix of Maximum-Likelihood Estimates in Factor Analysis: The Case of Nearly Singular Matrix of Estimates of Unique VariancesDocument21 pagesThe Asymptotic Covariance Matrix of Maximum-Likelihood Estimates in Factor Analysis: The Case of Nearly Singular Matrix of Estimates of Unique Variancesadi.s022No ratings yet
- Kronecker ProductDocument10 pagesKronecker ProductIgnacio MolinaNo ratings yet
- Damage 99Document29 pagesDamage 99ing_costeroNo ratings yet
- Quartet Condensation and Isovector Pairing Correlations in N Z NucleiDocument5 pagesQuartet Condensation and Isovector Pairing Correlations in N Z Nucleikibur1No ratings yet
- Sorbom, Dag (1974)Document11 pagesSorbom, Dag (1974)evgtsNo ratings yet
- Jennifer S. K. Chan Anthony Y. C. KukDocument13 pagesJennifer S. K. Chan Anthony Y. C. KukSnow StarNo ratings yet
- Modeling and Mathematical Formulation: 4-1: Finite Element FormulationsDocument24 pagesModeling and Mathematical Formulation: 4-1: Finite Element FormulationsHusseinali HusseinNo ratings yet
- Nemat Nasser Periodic Homogénisation 1981Document17 pagesNemat Nasser Periodic Homogénisation 1981auslenderNo ratings yet
- BEM1Document4 pagesBEM1Andrijana KuharNo ratings yet
- American Statistical Association American Society For QualityDocument8 pagesAmerican Statistical Association American Society For QualityAlbanita MendesNo ratings yet
- A Modified Optimal Sensor Placement Method Based On The Effective Independence MethodDocument8 pagesA Modified Optimal Sensor Placement Method Based On The Effective Independence MethodYenaNo ratings yet
- Nonlinear Least SQ: Queensland 4001, AustraliaDocument17 pagesNonlinear Least SQ: Queensland 4001, AustraliaAbdul AzizNo ratings yet
- The Exact Computation of The Free Rigid Body Motion and Its Use in Splitting MethodsDocument30 pagesThe Exact Computation of The Free Rigid Body Motion and Its Use in Splitting MethodsShierene Mae LabisNo ratings yet
- A Two-Scale Damage Model With Material Length: Cristian DascaluDocument8 pagesA Two-Scale Damage Model With Material Length: Cristian DascaluyycNo ratings yet
- Lógica Fuzzy MestradoDocument15 pagesLógica Fuzzy Mestradoaempinto028980No ratings yet
- Effective Partitioning Method For Computing Generalized Inverses and Their GradientsDocument13 pagesEffective Partitioning Method For Computing Generalized Inverses and Their GradientsVukasinnnNo ratings yet
- 60 B 7 D 51 F 18159 DBBB 1Document21 pages60 B 7 D 51 F 18159 DBBB 1Snow StarNo ratings yet
- Mathematical Association of America Mathematics MagazineDocument4 pagesMathematical Association of America Mathematics Magazine88915334No ratings yet
- Modeling of Large Deformations of Hyperelastic MaterialsDocument4 pagesModeling of Large Deformations of Hyperelastic MaterialsSEP-PublisherNo ratings yet
- Aim:-Study of FEM (Finite Element Method) Finite-Element MethodDocument9 pagesAim:-Study of FEM (Finite Element Method) Finite-Element MethodAshley Silvester AnthonyNo ratings yet
- Data Clustering with Quantum MechanicsDocument17 pagesData Clustering with Quantum MechanicsTaher JelleliNo ratings yet
- Estimation For Multivariate Linear Mixed ModelsDocument6 pagesEstimation For Multivariate Linear Mixed ModelsFir DausNo ratings yet
- v2n220141 14 01Document14 pagesv2n220141 14 01api-239584927No ratings yet
- Gharamani PcaDocument8 pagesGharamani PcaLeonardo L. ImpettNo ratings yet
- Wave Equation Applications in Peridynamic Model: Hisham M. Ali HasanDocument5 pagesWave Equation Applications in Peridynamic Model: Hisham M. Ali Hasansar0000No ratings yet
- American Mathematical SocietyDocument20 pagesAmerican Mathematical SocietyAndrea MaroniNo ratings yet
- Valor T de Dickey PDFDocument34 pagesValor T de Dickey PDFWinckels WidulskiNo ratings yet
- Power Series Method For Solving First Order Stiff Systems On Piecewise Uniform MeshDocument8 pagesPower Series Method For Solving First Order Stiff Systems On Piecewise Uniform MeshInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 2 Finite Element MethodDocument25 pages2 Finite Element MethodShuhang ChenNo ratings yet
- Fast Approximation of The Norm Via Optimization Over Spectral Value SetsDocument29 pagesFast Approximation of The Norm Via Optimization Over Spectral Value SetsarviandyNo ratings yet
- Differential Quadrature MethodDocument13 pagesDifferential Quadrature MethodShannon HarrisNo ratings yet
- Constraint Aggregation Principle Speeds Up Convex OptimizationDocument21 pagesConstraint Aggregation Principle Speeds Up Convex OptimizationCarlos Eduardo Morales MayhuayNo ratings yet
- A Predictive Approach To The Random Effect ModelDocument7 pagesA Predictive Approach To The Random Effect ModelKamal DemmamiNo ratings yet
- EM Based Medical Image SegmentaitonDocument4 pagesEM Based Medical Image SegmentaitonMohAnVinNo ratings yet
- SE3 Feaures NNDocument8 pagesSE3 Feaures NNPp DdNo ratings yet
- Choquet Integral With Stochastic Entries: SciencedirectDocument15 pagesChoquet Integral With Stochastic Entries: SciencedirectKumar palNo ratings yet
- Estimation For Multivariate Linear Mixed ModelsDocument7 pagesEstimation For Multivariate Linear Mixed Modelsilkom12No ratings yet
- Fixed vs. Random Effects Panel Data Models: Revisiting The Omitted Latent Variables and Individual Heterogeneity ArgumentsDocument20 pagesFixed vs. Random Effects Panel Data Models: Revisiting The Omitted Latent Variables and Individual Heterogeneity ArgumentsJoshua PryorNo ratings yet
- On The Sum of Left and Right Circulant Ma 2023 Linear Algebra and Its ApplicDocument24 pagesOn The Sum of Left and Right Circulant Ma 2023 Linear Algebra and Its ApplicSasikalaNo ratings yet
- Buckling Analysis of A Laminate Plate: E. Kormaníková, I. MamuzicDocument4 pagesBuckling Analysis of A Laminate Plate: E. Kormaníková, I. MamuzicIamandei ElenaNo ratings yet
- Analysis of Truss-Cable StructuresDocument9 pagesAnalysis of Truss-Cable StructuresKtk ZadNo ratings yet
- A D-Brane Inspired Trinification Model. G. K. Leontaris and J. RizosDocument12 pagesA D-Brane Inspired Trinification Model. G. K. Leontaris and J. RizosColmain NassiriNo ratings yet
- Fast Generation of Accurate Synthetic MicrodataDocument9 pagesFast Generation of Accurate Synthetic MicrodataJai KhairaNo ratings yet
- Paper 23-A New Type Method For The Structured Variational Inequalities ProblemDocument4 pagesPaper 23-A New Type Method For The Structured Variational Inequalities ProblemEditor IJACSANo ratings yet
- Econometrics: JournalofDocument26 pagesEconometrics: Journalofrano karnoNo ratings yet
- Refined Higher-Order Plate Bending ElementDocument7 pagesRefined Higher-Order Plate Bending ElementVijayraj11No ratings yet
- Properties of A Semi-Discrete Approximation To The Beam EquationDocument11 pagesProperties of A Semi-Discrete Approximation To The Beam EquationjtorerocNo ratings yet
- Continuous Symmetries In: Field TheoryDocument33 pagesContinuous Symmetries In: Field Theoryrebe53No ratings yet
- Inverse Kinematics Algorithms for Protein Structure DeterminationDocument13 pagesInverse Kinematics Algorithms for Protein Structure Determinationulysse_d_ithaqu7083No ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeFrom EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeNo ratings yet
- RBI Mains Exam PaperDocument7 pagesRBI Mains Exam Paperarjun singhNo ratings yet
- Quantitative AbilityDocument15 pagesQuantitative Abilityarjun singhNo ratings yet
- Statistics Pre 2013Document19 pagesStatistics Pre 2013ajay0sharma_1No ratings yet
- Mlelr PDFDocument23 pagesMlelr PDFarjun singhNo ratings yet
- Aptitude Test Question Paper (Eng)Document10 pagesAptitude Test Question Paper (Eng)Parag RathodNo ratings yet
- Maximum Likelihood Estimation of Simultaneous EquationsDocument12 pagesMaximum Likelihood Estimation of Simultaneous Equationsarjun singhNo ratings yet
- Introduction to PCA and FA: Dimension Reduction ToolsDocument29 pagesIntroduction to PCA and FA: Dimension Reduction ToolsPushpaRasnayakeNo ratings yet
- Chapter8 Econometrics HeteroskedasticityDocument15 pagesChapter8 Econometrics HeteroskedasticityAbdullah KhatibNo ratings yet
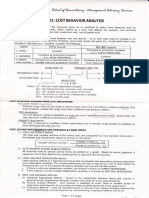
- Cost Behavior Analysis ExplainedDocument4 pagesCost Behavior Analysis ExplainedVince De GuzmanNo ratings yet
- Linkbelt Rough Terrain Crane RTC 8025 II RTC 8030 II Service ManualDocument22 pagesLinkbelt Rough Terrain Crane RTC 8025 II RTC 8030 II Service Manualjilljames090502dze100% (106)
- Perssuasive EssayDocument5 pagesPerssuasive Essayapi-512789628No ratings yet
- Fundamental of Software Engineering: Faculty of Technology Department of Computer Science Debre Tabor UniversityDocument17 pagesFundamental of Software Engineering: Faculty of Technology Department of Computer Science Debre Tabor UniversityBethelhem YetwaleNo ratings yet
- The Cave of Snakes: T D E RPG O: Exotic VistasDocument1 pageThe Cave of Snakes: T D E RPG O: Exotic VistasFabien WeissgerberNo ratings yet
- LS1 - Idioms-WorksheetsDocument2 pagesLS1 - Idioms-WorksheetsMarbz AlsteacherNo ratings yet
- Cryptography AssignmentDocument5 pagesCryptography AssignmentAaron MendozaNo ratings yet
- Sample Professional - Engineer - Summary - StatementDocument5 pagesSample Professional - Engineer - Summary - StatementmrahmedNo ratings yet
- GaurGopalDas ReportDocument3 pagesGaurGopalDas Reportdr.menganeNo ratings yet
- Strategic DissonanceDocument29 pagesStrategic DissonanceDamian Flori AlinaNo ratings yet
- Road To WWII RevisionDocument2 pagesRoad To WWII RevisionAngelWithAShotgun07No ratings yet
- Islcollective Worksheets Preintermediate A2 High School Reading Speaking Adjectives To Describe Personality and Characte 881191338542ea693560488 36713719Document2 pagesIslcollective Worksheets Preintermediate A2 High School Reading Speaking Adjectives To Describe Personality and Characte 881191338542ea693560488 36713719Citra Priski Abadi33% (9)
- The Modernization of Foreign Language Ed-1-2Document148 pagesThe Modernization of Foreign Language Ed-1-2English in Kz HereNo ratings yet
- Flymaster NAV Manual EN v2 PDFDocument52 pagesFlymaster NAV Manual EN v2 PDFRoberto PlevanoNo ratings yet
- All Contracts Are Agreements But All Agreements Are Not ContractsDocument3 pagesAll Contracts Are Agreements But All Agreements Are Not ContractsManimegalai SabarinathanNo ratings yet
- Theme: Is Cell Phone Dangerous? Speaker 1 Positive TeamDocument4 pagesTheme: Is Cell Phone Dangerous? Speaker 1 Positive TeamLILIS ROHAYATINo ratings yet
- Pone 0187798Document20 pagesPone 0187798Aakriti DahalNo ratings yet
- Gupta EmpireDocument9 pagesGupta EmpireYesan SellanNo ratings yet
- St. Paul City Council Legislation TextDocument3 pagesSt. Paul City Council Legislation TextPGurusNo ratings yet
- ESP Test 1 Part 1 AnswersDocument5 pagesESP Test 1 Part 1 Answerschemistry_mwuNo ratings yet
- Chapter 5 Greece Sec 1Document32 pagesChapter 5 Greece Sec 1missseesNo ratings yet
- The Process of Empirical Research A Learning ExperienceDocument13 pagesThe Process of Empirical Research A Learning ExperienceSatyam MishraNo ratings yet
- Gladys PDFDocument4 pagesGladys PDFUNEXPECTEDNo ratings yet
- Research Ni Mang JoshuaDocument1 pageResearch Ni Mang JoshuaAaron Joshua AguinaldoNo ratings yet
- Stage 1 English Curriculum Framework PDFDocument2 pagesStage 1 English Curriculum Framework PDFMangunatun KhasanahNo ratings yet
- Catullus Si LucretiusDocument2 pagesCatullus Si LucretiusAntonia MuraruNo ratings yet
- Prediction of One Repetition Maximal Strength From A A 5-10 Repetition - FemaleDocument6 pagesPrediction of One Repetition Maximal Strength From A A 5-10 Repetition - FemaleOz FalchiNo ratings yet
- Prediction of Return EductorDocument11 pagesPrediction of Return EductorToti TotiNo ratings yet