You might also like
- FULL Download Ebook PDF Hands On Introduction To Labview For Scientists and Engineers 4th Edition PDF EbookDocument42 pagesFULL Download Ebook PDF Hands On Introduction To Labview For Scientists and Engineers 4th Edition PDF Ebookbrandon.alexander48095% (41)
- A Nagoor Kani - SIGNALS AND SYSTEMS-Tata McGraw-Hill (2010) PDFDocument829 pagesA Nagoor Kani - SIGNALS AND SYSTEMS-Tata McGraw-Hill (2010) PDFSumedh Satam87% (15)
- Quantum Particle Swarm Optimization For ElectromagneticsDocument27 pagesQuantum Particle Swarm Optimization For ElectromagneticsbababhoNo ratings yet
- Metrology Ad Measuremet Systems: Index 330930, ISS 0860-8229 WWW - Metrology.pg - Gda.plDocument12 pagesMetrology Ad Measuremet Systems: Index 330930, ISS 0860-8229 WWW - Metrology.pg - Gda.plSiddharthNo ratings yet
- Physics-Informed Deep Generative ModelsDocument8 pagesPhysics-Informed Deep Generative ModelsJinhan KimNo ratings yet
- Power Load Forecasting Based On Multi-Task Gaussian ProcessDocument6 pagesPower Load Forecasting Based On Multi-Task Gaussian ProcessKhalid AlHashemiNo ratings yet
- Stable Fourier Neural Networks With Application To Modeling Lettuce GrowthDocument6 pagesStable Fourier Neural Networks With Application To Modeling Lettuce GrowthToprak AlemNo ratings yet
- Nonlinear Dynamics, Delay Times, and Embedding WindowsDocument13 pagesNonlinear Dynamics, Delay Times, and Embedding WindowsThu TrangNo ratings yet
- Power Load Forecasting Based On Multi Task Gaussia - 2014 - IFAC Proceedings VolDocument6 pagesPower Load Forecasting Based On Multi Task Gaussia - 2014 - IFAC Proceedings VolKhalid AlHashemiNo ratings yet
- 3 Aip 2020Document7 pages3 Aip 2020STAN MARIANo ratings yet
- OSIRIS: A New Code For Ray Tracing Around Compact ObjectsDocument12 pagesOSIRIS: A New Code For Ray Tracing Around Compact ObjectsRafael S. MoraesNo ratings yet
- Compressed SensingDocument34 pagesCompressed SensingLogan ChengNo ratings yet
- Scalable Solvers of Random Quadratic Equations Via Stochastic Truncated Amplitude FlowDocument14 pagesScalable Solvers of Random Quadratic Equations Via Stochastic Truncated Amplitude FlowvidulaNo ratings yet
- Linear SystemDocument13 pagesLinear Systemgina fikriaNo ratings yet
- Marcum Q Cao2016Document4 pagesMarcum Q Cao2016peppas4643No ratings yet
- 2007 Damping EstimationDocument9 pages2007 Damping EstimationdasdreadfefaNo ratings yet
- Phase Retrieval From Coded Diffraction Patterns: Emmanuel J. Cand' Es Xiaodong Li Mahdi Soltanolkotabi November 7, 2013Document23 pagesPhase Retrieval From Coded Diffraction Patterns: Emmanuel J. Cand' Es Xiaodong Li Mahdi Soltanolkotabi November 7, 2013jennyjhlee0621No ratings yet
- A Starting Point Strategy For Nonlinear Interior Methods: Applied Mathematics LettersDocument8 pagesA Starting Point Strategy For Nonlinear Interior Methods: Applied Mathematics LettersValentino LunardiNo ratings yet
- Huynh Khac TuanDocument12 pagesHuynh Khac TuanfredyNo ratings yet
- Seismic Source Inversion Using Discontinuous Galerkin Methods A Bayesian ApproachDocument16 pagesSeismic Source Inversion Using Discontinuous Galerkin Methods A Bayesian ApproachJuan Pablo Madrigal CianciNo ratings yet
- A Cell-Vertex Multigrid Method For The Navier-StokDocument42 pagesA Cell-Vertex Multigrid Method For The Navier-StokludokellypNo ratings yet
- Identification Uncertainty of Close Modes in Operational Modal AnalysisDocument7 pagesIdentification Uncertainty of Close Modes in Operational Modal AnalysisManuel AndresNo ratings yet
- Chaos in Delay Differential Equations WithDocument13 pagesChaos in Delay Differential Equations WithMDARQUAMNo ratings yet
- Cite453High Res Radar Via CSDocument10 pagesCite453High Res Radar Via CSNag ChallaNo ratings yet
- Nonlinear Time-Series Analysis: Ulrich ParlitzDocument31 pagesNonlinear Time-Series Analysis: Ulrich ParlitzFranklin Peña PoloNo ratings yet
- Proceedings Letters: Section DiscontinuedDocument2 pagesProceedings Letters: Section DiscontinuedMs AghamiriNo ratings yet
- Refer Guide REDIM 2005 2Document43 pagesRefer Guide REDIM 2005 2elnaqa176No ratings yet
- Applied Mathematics and Computation: Alper Korkmaz, Idris Da GDocument12 pagesApplied Mathematics and Computation: Alper Korkmaz, Idris Da GLaila FouadNo ratings yet
- Modelica-Based Modeling and Simulation of Satellite On-Orbit Deployment and Attitude ControlDocument9 pagesModelica-Based Modeling and Simulation of Satellite On-Orbit Deployment and Attitude ControlGkkNo ratings yet
- Quantum Moment Hydrodynamics and The Entropy Principle: P. Degond and C. RinghoferDocument34 pagesQuantum Moment Hydrodynamics and The Entropy Principle: P. Degond and C. RinghofersoibalNo ratings yet
- Machine Learning For Quantitative Finance: Fast Derivative Pricing, Hedging and FittingDocument15 pagesMachine Learning For Quantitative Finance: Fast Derivative Pricing, Hedging and FittingJ Martin O.No ratings yet
- Thiebaut 2008 MarseilleDocument12 pagesThiebaut 2008 MarseilleAnonymous FGY7goNo ratings yet
- Long-Term Prediction of Time Series Using State-Space ModelsDocument11 pagesLong-Term Prediction of Time Series Using State-Space ModelsMurilo CamargosNo ratings yet
- A Pseudospectral Method For The One Dimensional Fractional Laplacian On RDocument31 pagesA Pseudospectral Method For The One Dimensional Fractional Laplacian On RRocher FerreroNo ratings yet
- Computing Room Acoustics With CUDA - 3D FDTD Schem PDFDocument4 pagesComputing Room Acoustics With CUDA - 3D FDTD Schem PDFLavkeshKumarNo ratings yet
- Proper Orthogonal DecompositionDocument10 pagesProper Orthogonal DecompositionradheNo ratings yet
- Heat Transfer 2003Document15 pagesHeat Transfer 2003kaies02No ratings yet
- Particle Filter TutorialDocument39 pagesParticle Filter TutorialJen RundsNo ratings yet
- An Adaptive Nonlinear Least-Squares AlgorithmDocument21 pagesAn Adaptive Nonlinear Least-Squares AlgorithmOleg ShirokobrodNo ratings yet
- A Comparative Study of Mathematical Modeling MethodsDocument7 pagesA Comparative Study of Mathematical Modeling MethodsJauilson CrisostomoNo ratings yet
- D. Dimitrijevic, G.S. Djordjevic and Lj. Nesic - Ultrametric Extradimensions and Tachyonic CosmologyDocument14 pagesD. Dimitrijevic, G.S. Djordjevic and Lj. Nesic - Ultrametric Extradimensions and Tachyonic CosmologyTuoma2No ratings yet
- Multisensor Target Tracking With Delayed StatesDocument5 pagesMultisensor Target Tracking With Delayed StatesAnindha ParthyNo ratings yet
- Global Well-Posedness For A System of QuasilinearDocument43 pagesGlobal Well-Posedness For A System of QuasilinearAzer TyuiopNo ratings yet
- BME I5100 Biomedical Signal Processing: Lucas C. Parra Biomedical Engineering Department City College of New YorkDocument34 pagesBME I5100 Biomedical Signal Processing: Lucas C. Parra Biomedical Engineering Department City College of New YorkparrexNo ratings yet
- Resolvent-Based Reduced-Order Modeling of Turbulent FlowsDocument4 pagesResolvent-Based Reduced-Order Modeling of Turbulent FlowsugurkarbanNo ratings yet
- Algorithm For Electromagnetic Power Estimation in Radio Environment MapDocument18 pagesAlgorithm For Electromagnetic Power Estimation in Radio Environment MapTilalNo ratings yet
- Ewins GleesonDocument23 pagesEwins Gleesonalexandre ramosNo ratings yet
- Large-N Gauge TheoriesDocument69 pagesLarge-N Gauge TheoriesJohn BirdNo ratings yet
- 1 s2.0 0029549381901722 Main (1981)Document9 pages1 s2.0 0029549381901722 Main (1981)Prabath PzNo ratings yet
- A Jacobian-Free Newton-Krylov Method For Time-Implicit Multidimensional HydrodynamicsDocument17 pagesA Jacobian-Free Newton-Krylov Method For Time-Implicit Multidimensional HydrodynamicsAndres MargonariNo ratings yet
- Journal of Statistical SoftwareDocument25 pagesJournal of Statistical Softwarecarles1972mmNo ratings yet
- Intelligent Expert System For Protection Optimization Purposes in Electric Power Distribution SystemsDocument21 pagesIntelligent Expert System For Protection Optimization Purposes in Electric Power Distribution SystemsYume YumeNo ratings yet
- SinhaDu16 PDFDocument20 pagesSinhaDu16 PDFÜmit AslanNo ratings yet
- Frkdiric: Blind Separation of Dependent Sources Using The "Time-Frequency Ratio of Mixtures" ApproachDocument4 pagesFrkdiric: Blind Separation of Dependent Sources Using The "Time-Frequency Ratio of Mixtures" ApproachAli KHALFANo ratings yet
- A Tutorial On Particle Filtering and Smoothing: Fifteen Years LaterDocument41 pagesA Tutorial On Particle Filtering and Smoothing: Fifteen Years LaterNabiha ReyhanNo ratings yet
- JIFS179551Document12 pagesJIFS179551safiouss12No ratings yet
- Evolving Neural Network Using Real Coded Genetic Algorithm (GA) For Multispectral Image ClassificationDocument13 pagesEvolving Neural Network Using Real Coded Genetic Algorithm (GA) For Multispectral Image Classificationjkl316No ratings yet
- A Kendall Correlation Coefficient Between Functional Data: Dalia Valencia Rosa E. Lillo Juan RomoDocument21 pagesA Kendall Correlation Coefficient Between Functional Data: Dalia Valencia Rosa E. Lillo Juan RomoLawranceNo ratings yet
- Report4 Density Estimation AllDocument63 pagesReport4 Density Estimation AllJohnNo ratings yet
- Assessing The Significance of The Correlation Between Two Spatial ProcessesDocument13 pagesAssessing The Significance of The Correlation Between Two Spatial ProcessesJoão Pedro CaetanoNo ratings yet
- New Constructions of Sonar Sequences: Diego F. Ruiz, Carlos A. Trujillo, and Yadira CaicedoDocument5 pagesNew Constructions of Sonar Sequences: Diego F. Ruiz, Carlos A. Trujillo, and Yadira CaicedoGarudaOzoNo ratings yet
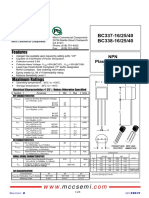
- BC337 - 338 (To 92) 276712 PDFDocument5 pagesBC337 - 338 (To 92) 276712 PDFJuan EstradaNo ratings yet
- Peace, Be Still: - Text: Mary Ann Baker Music: H.R. PalmerDocument1 pagePeace, Be Still: - Text: Mary Ann Baker Music: H.R. PalmerJuan EstradaNo ratings yet
- Multispectral Oximetry Imaging Readings With Associated Healing TrajectoryDocument6 pagesMultispectral Oximetry Imaging Readings With Associated Healing TrajectoryJuan EstradaNo ratings yet
- JBO 19-1-010901 Medical Hiperspectral Imaging ReviewDocument24 pagesJBO 19-1-010901 Medical Hiperspectral Imaging ReviewJuan EstradaNo ratings yet
- Application of Fourier AnalysisDocument5 pagesApplication of Fourier AnalysisMuhammad Ubaid RazaNo ratings yet
- Cs2403 DSP Nov 2011 QPDocument3 pagesCs2403 DSP Nov 2011 QPvijayshankar743No ratings yet
- 15.pipelined Parallel FFT Architectures Via Folding TransformationDocument14 pages15.pipelined Parallel FFT Architectures Via Folding TransformationFathima SabiNo ratings yet
- The Fractional Fourier Transform and Application1Document7 pagesThe Fractional Fourier Transform and Application1ceroja_chanNo ratings yet
- LabDocument15 pagesLabVinitKharkarNo ratings yet
- Zero PaddingDocument15 pagesZero Paddingsum1oruNo ratings yet
- Sample MCQ Unit IIDocument6 pagesSample MCQ Unit IINikhil MathurNo ratings yet
- McNamaraBuland BSSADocument12 pagesMcNamaraBuland BSSAStageof WinangunNo ratings yet
- BioPhone Physiology Monitoring From Peripheral Smartphone MotionsDocument4 pagesBioPhone Physiology Monitoring From Peripheral Smartphone Motionsbhuiyan1No ratings yet
- Norma D 6000 Norma D 6000 Norma D 6000 Norma D 6000 Norma D 6000Document12 pagesNorma D 6000 Norma D 6000 Norma D 6000 Norma D 6000 Norma D 6000Johan MorenoNo ratings yet
- 1-Image Forgery Detection - Final ReportDocument76 pages1-Image Forgery Detection - Final ReportAli Maarouf67% (3)
- Fourier Analysis Using A Spreadsheet: Articles You May Be Interested inDocument5 pagesFourier Analysis Using A Spreadsheet: Articles You May Be Interested inVigneshwaran KandaswamyNo ratings yet
- DSP01Document14 pagesDSP01Shaista NazNo ratings yet
- P4 Villoria Quiñones Pablo AlbertoDocument2 pagesP4 Villoria Quiñones Pablo AlbertoVilloria AlbertoNo ratings yet
- Program TMS320LF2407ADocument107 pagesProgram TMS320LF2407AgsmsbyNo ratings yet
- Airbag Fall ProtectionDocument9 pagesAirbag Fall ProtectiondeviNo ratings yet
- IJARCSSEDocument6 pagesIJARCSSEErtuğrul Eren DurakNo ratings yet
- An Improved Immersed Boundary Method by Coupling of The Multi Direct Forcing and Fourier Pseudo Spectral MethodsDocument23 pagesAn Improved Immersed Boundary Method by Coupling of The Multi Direct Forcing and Fourier Pseudo Spectral Methodslynettelmx111No ratings yet
- Fractional Fourier Transform PDFDocument22 pagesFractional Fourier Transform PDFroitnedurpNo ratings yet
- 1994 Draine Discrete DipoleDocument9 pages1994 Draine Discrete DipoleAkanksha VermaNo ratings yet
- DSP 2 MarksDocument20 pagesDSP 2 MarksSanthosh SandyNo ratings yet
- Corrections For Frequency, Amplitude and Phase in A Fast Fourier Transform of A Harmonic SignalDocument11 pagesCorrections For Frequency, Amplitude and Phase in A Fast Fourier Transform of A Harmonic SignalIgnacio Daniel Tomasov SilvaNo ratings yet
- CH 4 FFT PDFDocument57 pagesCH 4 FFT PDFArundhati ChaudhariNo ratings yet
- Saboor SNS Lab 10Document6 pagesSaboor SNS Lab 10Khalid MehmoodNo ratings yet
- Experiment 2: Fourier Series and Fourier Transform: I. ObjectivesDocument8 pagesExperiment 2: Fourier Series and Fourier Transform: I. ObjectivesJomarCalacagNo ratings yet
- MEL G642-Compre Solution - 2 2016-17Document9 pagesMEL G642-Compre Solution - 2 2016-17Gaurav PatilNo ratings yet
- Signal Processing in MATLABDocument3 pagesSignal Processing in MATLABRadu VancaNo ratings yet
- ME Operating Men, I Think All Agree Have Harmonics. I Ull Agree ThatDocument7 pagesME Operating Men, I Think All Agree Have Harmonics. I Ull Agree ThatJohn WNSNo ratings yet