You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Taekwondo StancesDocument2 pagesTaekwondo StancesHaider Usman100% (1)
- 5 - Playthrough ExamplesDocument34 pages5 - Playthrough Examplesjoel lealNo ratings yet
- ACI Packet Forwarding Deep Dive ELAMDocument32 pagesACI Packet Forwarding Deep Dive ELAMras aNo ratings yet
- 28 Societe Produits Nestle S.A. v. Dy Jr.Document2 pages28 Societe Produits Nestle S.A. v. Dy Jr.Rain HofileñaNo ratings yet
- Analogies 1 Six Types of AnalogiesDocument43 pagesAnalogies 1 Six Types of AnalogiesJohn Louis Amil100% (2)
- NAFFCOInert Catalogue PDFDocument16 pagesNAFFCOInert Catalogue PDFMac ShaikNo ratings yet
- The Snow: C. Alice Elgar Edward Elgar, 026Document12 pagesThe Snow: C. Alice Elgar Edward Elgar, 026Kyle M. VillarinNo ratings yet
- Lecture in TTCSCOLDocument33 pagesLecture in TTCSCOLLaleth Mendoza OjalesNo ratings yet
- 7E Lesson Plan ChemistryDocument2 pages7E Lesson Plan ChemistryGeralyn CosmeNo ratings yet
- Powersso-24 Mechanical Data: Dim. Mm. Min. Typ MaxDocument1 pagePowersso-24 Mechanical Data: Dim. Mm. Min. Typ MaxDan EsentherNo ratings yet
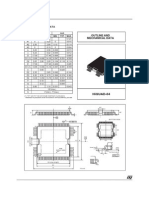
- Powerso16: Outline and Mechanical DataDocument1 pagePowerso16: Outline and Mechanical DataDan EsentherNo ratings yet
- Powerso-10 Mechanical Data: Dim. Mm. Inch Min. Typ Max. Min. Typ. MaxDocument1 pagePowerso-10 Mechanical Data: Dim. Mm. Inch Min. Typ Max. Min. Typ. MaxDan EsentherNo ratings yet
- Powerso-20 Mechanical Data: Dim. Mm. Inch Min. TYP Max. Min. Typ. MaxDocument1 pagePowerso-20 Mechanical Data: Dim. Mm. Inch Min. TYP Max. Min. Typ. MaxDan EsentherNo ratings yet
- Hiquad 64Document1 pageHiquad 64Dan EsentherNo ratings yet
- PSSO-12 Mechanical Data: Dim. Mm. Min. TYP MaxDocument1 pagePSSO-12 Mechanical Data: Dim. Mm. Min. TYP MaxDan EsentherNo ratings yet
- Multipowerso-30 Mechanical Data: Dim. Mm. Min. Typ MaxDocument1 pageMultipowerso-30 Mechanical Data: Dim. Mm. Min. Typ MaxDan EsentherNo ratings yet
- Fully Integrated H-Bridge Motor Driver: VNH3SP30Document26 pagesFully Integrated H-Bridge Motor Driver: VNH3SP30Dan EsentherNo ratings yet
- Ppak Mechanical Data: Dim. Min. TYP MaxDocument1 pagePpak Mechanical Data: Dim. Min. TYP MaxDan EsentherNo ratings yet
- VND830PEP-E: Double Channel High Side DriverDocument13 pagesVND830PEP-E: Double Channel High Side DriverDan EsentherNo ratings yet
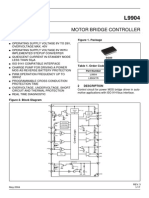
- L9929Document3 pagesL9929Dan EsentherNo ratings yet
- Lin Bus Transceiver: 1 FeaturesDocument14 pagesLin Bus Transceiver: 1 FeaturesDan EsentherNo ratings yet
- 10022Document262 pages10022Dan EsentherNo ratings yet
- Octal Configurable Low/High Side Driver: DescriptionDocument18 pagesOctal Configurable Low/High Side Driver: DescriptionDan Esenther100% (1)
- 10302Document4 pages10302Dan EsentherNo ratings yet
- 9432Document18 pages9432Dan EsentherNo ratings yet
- Quad Smart Power Solid State Relay For Complete H Bridge ConfigurationsDocument20 pagesQuad Smart Power Solid State Relay For Complete H Bridge ConfigurationsDan EsentherNo ratings yet
- 9019Document17 pages9019Dan Esenther100% (1)
- VN800S VN800PT: High Side DriverDocument21 pagesVN800S VN800PT: High Side DriverDan EsentherNo ratings yet
- Everybody Loves A Good Drought Book ReviewDocument3 pagesEverybody Loves A Good Drought Book ReviewAbatis ThokalathNo ratings yet
- Rguhs Dissertation AyurvedaDocument5 pagesRguhs Dissertation AyurvedaBestOnlinePaperWritersBillings100% (1)
- DMH Auditors Management Letter 1998Document38 pagesDMH Auditors Management Letter 1998williamblue100% (2)
- Ramesh PTE PreperationDocument6 pagesRamesh PTE Preperationdarpan.groverNo ratings yet
- 1) IntroductionDocument62 pages1) IntroductionSanjay RagupathyNo ratings yet
- Online Billing System Thesis PDFDocument4 pagesOnline Billing System Thesis PDFykramhiig100% (2)
- CV M Haekal Jimi FariziDocument1 pageCV M Haekal Jimi FariziFariz QintharaNo ratings yet
- MP CJ Paper IV (Phaseiv)Document14 pagesMP CJ Paper IV (Phaseiv)Mohd SuhailNo ratings yet
- Lead-Acid Battery Catalogue 20220930Document18 pagesLead-Acid Battery Catalogue 20220930Michael SiaNo ratings yet
- JSPL Investor PresentationDocument60 pagesJSPL Investor PresentationRatish Kumar mishra100% (1)
- Big Data JosssDocument18 pagesBig Data JosssErika MaulanaNo ratings yet
- Legitimacy Theoryand Its Relationshipto CSRDisclosures ALiterature ReviewDocument18 pagesLegitimacy Theoryand Its Relationshipto CSRDisclosures ALiterature ReviewKhadija OutaNo ratings yet
- Curriculum Development RFPDocument21 pagesCurriculum Development RFPcasederallNo ratings yet
- Oct 2023 Ent530 GuidelineDocument19 pagesOct 2023 Ent530 Guideline2023189791100% (1)
- Biological Stain Analysis: DNA: Fourth EditionDocument88 pagesBiological Stain Analysis: DNA: Fourth Editionccondeiu1No ratings yet
- Claraboias DesenfumagemDocument2 pagesClaraboias DesenfumagemPaulo CostaNo ratings yet
- Automotive-Presentation-I.A.-AS1 20231013 193844 0000Document90 pagesAutomotive-Presentation-I.A.-AS1 20231013 193844 0000Renz Moyo ManzanillaNo ratings yet
- Parche Leon Estudio CapseinaDocument2 pagesParche Leon Estudio CapseinaGerson ReynosaNo ratings yet
- Quadrilaterals: It Came From The Latin Word "Quadri" Which Means Four and "Latus" Which Means SidesDocument2 pagesQuadrilaterals: It Came From The Latin Word "Quadri" Which Means Four and "Latus" Which Means SidesGeneroso SiaNo ratings yet
- ReportDocument63 pagesReportSabarish SampathkumarNo ratings yet
- Financial Statement Analysis: - FocusDocument12 pagesFinancial Statement Analysis: - FocuspfeNo ratings yet