You might also like
- Linear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionFrom EverandLinear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionNo ratings yet
- Common Phase Error Estimation and Suppression in OFDMDocument5 pagesCommon Phase Error Estimation and Suppression in OFDMemadhusNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Equalization MotionDocument10 pagesEqualization MotionMahmud JaafarNo ratings yet
- Basic Digital Signal Processing: Butterworths Basic SeriesFrom EverandBasic Digital Signal Processing: Butterworths Basic SeriesRating: 5 out of 5 stars5/5 (1)
- Review & Analysis of Interference & BER Analysis For MC-CDMADocument4 pagesReview & Analysis of Interference & BER Analysis For MC-CDMAerpublicationNo ratings yet
- Forced Convergence Decoding of LDPC Codes - EXIT Chart AnalysisDocument8 pagesForced Convergence Decoding of LDPC Codes - EXIT Chart Analysisapi-3851401No ratings yet
- ECTE301: Digital Signal Processing: The Z-Transform: Forward Transform & PropertiesDocument41 pagesECTE301: Digital Signal Processing: The Z-Transform: Forward Transform & PropertiesSaad KamranNo ratings yet
- Reducing Papr of Ofdm Signal by Iterative Companding and Filtering TechniqueDocument18 pagesReducing Papr of Ofdm Signal by Iterative Companding and Filtering TechniquepriyankaNo ratings yet
- BER Comparison Between Turbo, LDPC, and Polar CodesDocument7 pagesBER Comparison Between Turbo, LDPC, and Polar CodesGkhn MnrsNo ratings yet
- 3-Discrete Cosine Transform PDFDocument87 pages3-Discrete Cosine Transform PDFHiteshNo ratings yet
- 5G Wavework Ofdm and FBMC ComparisonDocument17 pages5G Wavework Ofdm and FBMC ComparisonPavika Sharma100% (1)
- PLL Design Cjhallenges 1677700685860Document12 pagesPLL Design Cjhallenges 1677700685860somswydNo ratings yet
- A Turbo Codes TutorialDocument9 pagesA Turbo Codes TutorialvmaizNo ratings yet
- FLW by BoukampDocument10 pagesFLW by BoukampaalexgNo ratings yet
- A FREQUENCY DOMAIN DIRECTION FINDERDocument4 pagesA FREQUENCY DOMAIN DIRECTION FINDERcatalloNo ratings yet
- CH 10Document45 pagesCH 10hjhjhj ghhjhNo ratings yet
- WCC Mod - 5Document12 pagesWCC Mod - 5Robin MishraNo ratings yet
- Direct Time-Domain Channel Impulse Response Estimation For OFDM-based SystemsDocument5 pagesDirect Time-Domain Channel Impulse Response Estimation For OFDM-based SystemsGabriel SantosNo ratings yet
- FPGA Implementation of Parallel FIR FiltersDocument10 pagesFPGA Implementation of Parallel FIR FiltersasfsfsafsafasNo ratings yet
- Joint Compensation of IQ Imbalance and Frequency Offset in OFDM SystemsDocument4 pagesJoint Compensation of IQ Imbalance and Frequency Offset in OFDM SystemsSandeep SunkariNo ratings yet
- Sampling, Reconstruction, and Elementary Digital Filters: R.C. MaherDocument21 pagesSampling, Reconstruction, and Elementary Digital Filters: R.C. MaherPVL NARASIMHA RAONo ratings yet
- Performance Analysis of ConcatenatedDocument4 pagesPerformance Analysis of ConcatenatedNawrasNo ratings yet
- MDFT PDFDocument4 pagesMDFT PDFMayank GangwarNo ratings yet
- Shanthi Pavan - Chopped N-Path CT DSM With FIR - TCAS 2018Document5 pagesShanthi Pavan - Chopped N-Path CT DSM With FIR - TCAS 2018Saleh Heidary ShalmanyNo ratings yet
- FBMC-OQAM in Doubly-Selective Channels: A New Perspective On MMSE EqualizationDocument5 pagesFBMC-OQAM in Doubly-Selective Channels: A New Perspective On MMSE EqualizationPushpa KotipalliNo ratings yet
- Digital Demodulator For BFSK Waveform Based Upon Correlator and Differentiator SystemsDocument9 pagesDigital Demodulator For BFSK Waveform Based Upon Correlator and Differentiator SystemsdabajiNo ratings yet
- Chirp Generators For Millimeter-Wave FMCW RadarsDocument15 pagesChirp Generators For Millimeter-Wave FMCW RadarsEşref TürkmenNo ratings yet
- Efficient Realization of Sigma-Delta Kalman Lowpass Filter in Hardware Using FPGADocument11 pagesEfficient Realization of Sigma-Delta Kalman Lowpass Filter in Hardware Using FPGACharoensakNo ratings yet
- RFID Radio Circuit Design in CMOSDocument46 pagesRFID Radio Circuit Design in CMOSpelikanul2004No ratings yet
- FIR FILTERS IMPLEMENTATION APPROACHES REPORTDocument14 pagesFIR FILTERS IMPLEMENTATION APPROACHES REPORTH052 Rajesh Komaravalli ECENo ratings yet
- Adaptive Estimation/Compensation Scheme of IQ Imbalance With Frequency Offset in Communication ReceiversDocument10 pagesAdaptive Estimation/Compensation Scheme of IQ Imbalance With Frequency Offset in Communication ReceiversRACHID1988No ratings yet
- The Delta-Sigma Modulator: A Circuit For All SeasonsDocument6 pagesThe Delta-Sigma Modulator: A Circuit For All SeasonsSohaib AkhtarNo ratings yet
- Lecture 13 - Analog Communication (II) : James Barnes (James - Barnes@colostate - Edu)Document12 pagesLecture 13 - Analog Communication (II) : James Barnes (James - Barnes@colostate - Edu)raheem shaikNo ratings yet
- Ericmario 2010Document4 pagesEricmario 2010Phạm ĐăngNo ratings yet
- A_4-port-inductor-based_VCO_coupling_method_for_phase_noise_reductionDocument4 pagesA_4-port-inductor-based_VCO_coupling_method_for_phase_noise_reductionSai GaganNo ratings yet
- Wireless Communication Lecture 6Document10 pagesWireless Communication Lecture 6Ashish Nautiyal100% (1)
- Analysis of Doppler Spread Perturbations in OFDM (A) Systems: Special IssueDocument8 pagesAnalysis of Doppler Spread Perturbations in OFDM (A) Systems: Special IssueHarith1986No ratings yet
- Iir Filter PythonDocument11 pagesIir Filter Pythongosaitse seaseoleNo ratings yet
- Lecture 6Document9 pagesLecture 6Hussain NaushadNo ratings yet
- DSD 2019 Regular PaperDocument2 pagesDSD 2019 Regular Paperneha yarrapothuNo ratings yet
- Design and Implementation of IIR FilterDocument45 pagesDesign and Implementation of IIR FilterSaurabh Shukla67% (3)
- Effect of Various Dither On Quantization Errors of Ideal A/D ConvertersDocument6 pagesEffect of Various Dither On Quantization Errors of Ideal A/D ConvertersKier SinghNo ratings yet
- A Robust Baud Rate Estimator For Noncooperative Demodulation PDFDocument5 pagesA Robust Baud Rate Estimator For Noncooperative Demodulation PDFSorin GoldenbergNo ratings yet
- Analytical Calculations of CCDF For Some Common PAPR Reduction Techniques in OFDM SystemsDocument4 pagesAnalytical Calculations of CCDF For Some Common PAPR Reduction Techniques in OFDM SystemsDr-Eng Imad A. ShaheenNo ratings yet
- H.264 MPEG 4 Part 10 White PaperDocument47 pagesH.264 MPEG 4 Part 10 White PaperkukucoNo ratings yet
- IIR FILTER DESIGN TECHNIQUESDocument17 pagesIIR FILTER DESIGN TECHNIQUESBelachew AyaliewNo ratings yet
- Papr Reduction Ofofdm Signal by Using Hadamard Transform in Companding TechniquesDocument4 pagesPapr Reduction Ofofdm Signal by Using Hadamard Transform in Companding Techniquesdeepa2400No ratings yet
- Rijhun 1Document9 pagesRijhun 1amit kumarNo ratings yet
- A/D and D/A Converter FundamentalsDocument18 pagesA/D and D/A Converter FundamentalskarkeraNo ratings yet
- CarrierFrequencyoffsetDocument9 pagesCarrierFrequencyoffsethung kungNo ratings yet
- SDR Paper 1Document6 pagesSDR Paper 1Weiluo YieNo ratings yet
- IJEART05407Document4 pagesIJEART05407erpublicationNo ratings yet
- A Novel Iq Imbalance Compensation SchemeDocument6 pagesA Novel Iq Imbalance Compensation SchemepbabuNo ratings yet
- Lec8 - Transform Coding (JPG)Document39 pagesLec8 - Transform Coding (JPG)Ali AhmedNo ratings yet
- 77 GHZ ACCradarsimulationplatformDocument7 pages77 GHZ ACCradarsimulationplatformCORAL ALONSO JIMÉNEZNo ratings yet
- Maximizing Signal-to-Noise Ratio of Fixed-Point Digital FiltersDocument16 pagesMaximizing Signal-to-Noise Ratio of Fixed-Point Digital FiltersAthanasios MargarisNo ratings yet
- NTF - Design - For - Coeffiecents - in Practical - OTA - Systematic - Design - Centering - of - Continuous - Time - Oversampling - ConvertersDocument5 pagesNTF - Design - For - Coeffiecents - in Practical - OTA - Systematic - Design - Centering - of - Continuous - Time - Oversampling - Convertersbhargav nagarajuNo ratings yet
- E S (T) (Cos: LZDGDocument4 pagesE S (T) (Cos: LZDGSatya NagendraNo ratings yet
- Book Math Cutland ComputabilityDocument258 pagesBook Math Cutland ComputabilityKarl AnderssonNo ratings yet
- Tutorial Pytorch Best CommandsDocument8 pagesTutorial Pytorch Best CommandsRonaldo BenitezNo ratings yet
- On Probability Theory &stochastic ProcessDocument101 pagesOn Probability Theory &stochastic ProcessmohanNo ratings yet
- API 111 Solutions 7Document8 pagesAPI 111 Solutions 76doitNo ratings yet
- MIMO Fuel CellDocument7 pagesMIMO Fuel Cellchevy94No ratings yet
- DSP-Lec 07-Frequency Analysis of Signals and SystemsDocument40 pagesDSP-Lec 07-Frequency Analysis of Signals and SystemsthienminhNo ratings yet
- (Christian Gourieroux (Auth.) ) ARCH Models and FiDocument233 pages(Christian Gourieroux (Auth.) ) ARCH Models and FiMomo HalidouNo ratings yet
- 04 PagerankDocument64 pages04 PagerankHuyền Trang TrầnNo ratings yet
- I SucceedMath10thStandardCh2Document2 pagesI SucceedMath10thStandardCh2hritikaray4475No ratings yet
- Discrete Wavelet TransformDocument10 pagesDiscrete Wavelet TransformVigneshInfotechNo ratings yet
- SOA IssuesDocument2 pagesSOA IssuesDustin GaoNo ratings yet
- Clustering Colors in Images Using PythonDocument30 pagesClustering Colors in Images Using PythonFgpeqwNo ratings yet
- Wireless Security: Analysis and Improvement For IEEE 802.11 WLAN StandardDocument12 pagesWireless Security: Analysis and Improvement For IEEE 802.11 WLAN StandardThanavit CheevaprabhanantNo ratings yet
- Chapter 5: Simplification of Switching Functions: Minimization of Logic (Boolean) ExpressionsDocument12 pagesChapter 5: Simplification of Switching Functions: Minimization of Logic (Boolean) ExpressionsAffo AlexNo ratings yet
- Quicksort On Singly Linked List 14. Iterative Quick Sort 15. Merge Sort For Linked ListDocument21 pagesQuicksort On Singly Linked List 14. Iterative Quick Sort 15. Merge Sort For Linked ListPRE-GAMERS INC.No ratings yet
- Crypto Assignment 2019Document3 pagesCrypto Assignment 2019Ankit BagdeNo ratings yet
- Artificial Intelligence in Medicine Book - 2022 - 1Document18 pagesArtificial Intelligence in Medicine Book - 2022 - 1pedroNo ratings yet
- Speed Control of DC Servo Motor Using PIDocument26 pagesSpeed Control of DC Servo Motor Using PIUjjawal DarvaikarNo ratings yet
- QM LecNotes 02Document121 pagesQM LecNotes 02Rithish BarathNo ratings yet
- Linear ProgrammingDocument20 pagesLinear ProgrammingRamirez Mark IreneaNo ratings yet
- A New Hybrid K-Means and K-Nearest-Neighbor Algorithms For Text Document ClusteringDocument7 pagesA New Hybrid K-Means and K-Nearest-Neighbor Algorithms For Text Document Clusteringputri dewiNo ratings yet
- DE Using Laplace TransformDocument19 pagesDE Using Laplace TransformAllen CastorNo ratings yet
- Standard Normal Distribution and Z-Scores ExplainedDocument18 pagesStandard Normal Distribution and Z-Scores ExplainedAidan OsborneNo ratings yet
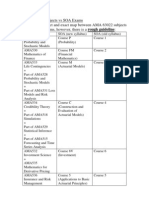
- SRI KRISHNADEVARAYA UNIVERSITY ANANTAPUR TIME TABLE FOR PG EXAMSDocument12 pagesSRI KRISHNADEVARAYA UNIVERSITY ANANTAPUR TIME TABLE FOR PG EXAMSYashwanth JvNo ratings yet
- New Frontiers in Graph TheoryDocument526 pagesNew Frontiers in Graph TheorySheshera Mysore100% (1)
- Mat 083 TheoryDocument3 pagesMat 083 Theorymustafa sertNo ratings yet
- What Is Chatgpt Doing ... and Why Does It Work - Stephen WolframDocument72 pagesWhat Is Chatgpt Doing ... and Why Does It Work - Stephen Wolframcyberman_770% (1)
- PID and Open vs Closed Loop SystemsDocument2 pagesPID and Open vs Closed Loop SystemsGabriel GabuyaNo ratings yet
- FINALDocument20 pagesFINALLokesh ChowdaryNo ratings yet
- Concepts of Value and ReturnDocument28 pagesConcepts of Value and ReturnDolly Garg0% (1)
- Blockchain Basics: A Non-Technical Introduction in 25 StepsFrom EverandBlockchain Basics: A Non-Technical Introduction in 25 StepsRating: 4.5 out of 5 stars4.5/5 (24)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceFrom EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNo ratings yet
- Clean Code: A Handbook of Agile Software CraftsmanshipFrom EverandClean Code: A Handbook of Agile Software CraftsmanshipRating: 5 out of 5 stars5/5 (13)
- Python Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)From EverandPython Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)Rating: 5 out of 5 stars5/5 (1)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.From EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Rating: 5 out of 5 stars5/5 (34)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- Android Studio Iguana Essentials - Kotlin EditionFrom EverandAndroid Studio Iguana Essentials - Kotlin EditionRating: 5 out of 5 stars5/5 (1)
- Linux: The Ultimate Beginner's Guide to Learn Linux Operating System, Command Line and Linux Programming Step by StepFrom EverandLinux: The Ultimate Beginner's Guide to Learn Linux Operating System, Command Line and Linux Programming Step by StepRating: 4.5 out of 5 stars4.5/5 (9)
- ITIL 4: Digital and IT strategy: Reference and study guideFrom EverandITIL 4: Digital and IT strategy: Reference and study guideRating: 5 out of 5 stars5/5 (1)
- HTML, CSS, and JavaScript Mobile Development For DummiesFrom EverandHTML, CSS, and JavaScript Mobile Development For DummiesRating: 4 out of 5 stars4/5 (10)
- SQL QuickStart Guide: The Simplified Beginner's Guide to Managing, Analyzing, and Manipulating Data With SQLFrom EverandSQL QuickStart Guide: The Simplified Beginner's Guide to Managing, Analyzing, and Manipulating Data With SQLRating: 4.5 out of 5 stars4.5/5 (46)
- Software Development: BCS Level 4 Certificate in IT study guideFrom EverandSoftware Development: BCS Level 4 Certificate in IT study guideRating: 3.5 out of 5 stars3.5/5 (2)
- The Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!From EverandThe Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!Rating: 4.5 out of 5 stars4.5/5 (2)
- Monitored: Business and Surveillance in a Time of Big DataFrom EverandMonitored: Business and Surveillance in a Time of Big DataRating: 4 out of 5 stars4/5 (1)
- Introducing Python: Modern Computing in Simple Packages, 2nd EditionFrom EverandIntroducing Python: Modern Computing in Simple Packages, 2nd EditionRating: 4 out of 5 stars4/5 (7)
- The Ultimate Python Programming Guide For Beginner To IntermediateFrom EverandThe Ultimate Python Programming Guide For Beginner To IntermediateRating: 4.5 out of 5 stars4.5/5 (3)
- Excel VBA: A Comprehensive, Step-By-Step Guide on Excel VBA Programming Tips and Tricks for Effective StrategiesFrom EverandExcel VBA: A Comprehensive, Step-By-Step Guide on Excel VBA Programming Tips and Tricks for Effective StrategiesNo ratings yet