You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- BS Iso 7401-2011 - (2020-11-09 - 12-15-00 PM) PDFDocument34 pagesBS Iso 7401-2011 - (2020-11-09 - 12-15-00 PM) PDFdenizinakNo ratings yet
- Automatic Control ExerciseDocument140 pagesAutomatic Control Exercisetaile1995No ratings yet
- Power Control SystemDocument29 pagesPower Control SystemJames XgunNo ratings yet
- Seli Yuli AntinaDocument8 pagesSeli Yuli AntinaSeliyuli AntinaNo ratings yet
- Tuning of Type-1 Servo System Using Swarm Intelligence For SIMO ProcessDocument4 pagesTuning of Type-1 Servo System Using Swarm Intelligence For SIMO ProcessAnonymous WkbmWCa8MNo ratings yet
- Analog Integrated Circuit Design: Nagendra KrishnapuraDocument26 pagesAnalog Integrated Circuit Design: Nagendra KrishnapuraAnkit Bhoomia0% (1)
- Set6 PDFDocument8 pagesSet6 PDFNITISH KUMARNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological Universitymanish_iitrNo ratings yet
- PTCH9353Document2 pagesPTCH9353suganthNo ratings yet
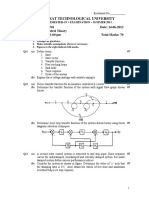
- Control Theory Summer 2013 CTDocument2 pagesControl Theory Summer 2013 CTvisupinuNo ratings yet
- PLL ManualDocument33 pagesPLL Manualmarcos78arNo ratings yet
- Temperature Control System and Its Control Using PID ControllerDocument3 pagesTemperature Control System and Its Control Using PID Controllerinty vacaNo ratings yet
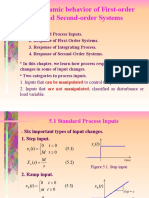
- Ist and 2nd Order ResponseDocument22 pagesIst and 2nd Order ResponseDeep SinojiyaNo ratings yet
- Tutorial 5.1 (Questions)Document4 pagesTutorial 5.1 (Questions)Sabrina AzharNo ratings yet
- Session1 SC16B047Document7 pagesSession1 SC16B047riyazuddin shaikNo ratings yet
- 1997 pachterQFTDocument18 pages1997 pachterQFTCumhur ÖzbaşNo ratings yet
- Ece 429 Control Systems Lab ManualDocument29 pagesEce 429 Control Systems Lab ManualZelalem GirmaNo ratings yet
- Modelling NoteDocument43 pagesModelling NoteMuzammil IqbalNo ratings yet
- Control Lab 05Document16 pagesControl Lab 05Zia Ayub100% (1)
- Lab Manual 11Document3 pagesLab Manual 11Shahroz MalikNo ratings yet
- Ball and BeamDocument8 pagesBall and BeamIonel MunteanuNo ratings yet
- Motor Control Systems Analysis Design and Optimization StrategiDocument75 pagesMotor Control Systems Analysis Design and Optimization Strategipeter vanderNo ratings yet
- Exp 1 CsecoverDocument5 pagesExp 1 CsecoverramsvsjbNo ratings yet
- Experiment-1 Sample and Hold Circuit Using OpampDocument45 pagesExperiment-1 Sample and Hold Circuit Using OpampSavita Kiran BNo ratings yet
- DC Motor ControllerDocument28 pagesDC Motor ControllerOmar MohamedNo ratings yet
- Second Order System LibreDocument16 pagesSecond Order System LibrePaul ShineNo ratings yet
- « Introduction to Biomedical Engineering»: СourseDocument5 pages« Introduction to Biomedical Engineering»: СourseEbrahim Abd El HadyNo ratings yet
- Time Response of Second Order SystemsDocument5 pagesTime Response of Second Order Systemsاحمد حافظNo ratings yet
- Final 03Document11 pagesFinal 03Luis AntonioNo ratings yet