You might also like
- Additional Exercises SolDocument632 pagesAdditional Exercises SolWasimHassanAwan80% (10)
- Homework #5: MA 402 Mathematics of Scientific Computing Due: Monday, September 27Document6 pagesHomework #5: MA 402 Mathematics of Scientific Computing Due: Monday, September 27ra100% (1)
- ISyE/Math/CS/Stat 525 - Linear Optimization AssignmentDocument9 pagesISyE/Math/CS/Stat 525 - Linear Optimization AssignmentNengke LinNo ratings yet
- Stanford University CS 229, Autumn 2014 Midterm ExaminationDocument23 pagesStanford University CS 229, Autumn 2014 Midterm ExaminationErico ArchetiNo ratings yet
- FEM For 2D With MatlabDocument33 pagesFEM For 2D With Matlabammar_harbNo ratings yet
- Problem Solving SeriesDocument7 pagesProblem Solving Seriesshraban dasNo ratings yet
- Combinatorial Optimization: Sheet 1Document2 pagesCombinatorial Optimization: Sheet 1Diany Pau T HNo ratings yet
- homework1Document3 pageshomework1Anh HoangNo ratings yet
- 6.854J / 18.415J Advanced Algorithms : Mit OpencoursewareDocument8 pages6.854J / 18.415J Advanced Algorithms : Mit OpencoursewarejhdmssNo ratings yet
- Na August 2018Document3 pagesNa August 2018Djaafer MezhoudNo ratings yet
- 05 Lecture - ILP-and-dualityDocument8 pages05 Lecture - ILP-and-dualityshimaNo ratings yet
- Notes FourierDocument18 pagesNotes FourierSakthiVelMNo ratings yet
- BV Cvxbook Extra ExercisesDocument237 pagesBV Cvxbook Extra ExercisesWilian GuamánNo ratings yet
- Additional Exercises for Convex Optimization ProblemsDocument232 pagesAdditional Exercises for Convex Optimization ProblemsShy PeachDNo ratings yet
- Additional Exercises for Convex OptimizationDocument117 pagesAdditional Exercises for Convex OptimizationAsif AhmedNo ratings yet
- MIT18 102s21 Lec1Document7 pagesMIT18 102s21 Lec1vladimirNo ratings yet
- MIT18 102s21 Full LecDocument125 pagesMIT18 102s21 Full LecProNo ratings yet
- hw03 1 02 SolutionsDocument3 pageshw03 1 02 SolutionsranvNo ratings yet
- Density Matrix SolutionsDocument21 pagesDensity Matrix SolutionsAnirbanMandal100% (1)
- Introduction To Partial Differential Equations 802635S: Valeriy Serov University of Oulu 2011Document122 pagesIntroduction To Partial Differential Equations 802635S: Valeriy Serov University of Oulu 2011henNo ratings yet
- Stability and Convergence of The Wavelet-Galerkin ...Document19 pagesStability and Convergence of The Wavelet-Galerkin ...Luu KhoaNo ratings yet
- Hw5 SolutionDocument4 pagesHw5 SolutionbrsbyrmNo ratings yet
- Function SpacesDocument20 pagesFunction SpacesGiovanni PalomboNo ratings yet
- MIT8 04S16 ps6 2016Document5 pagesMIT8 04S16 ps6 2016Sagar SwarupNo ratings yet
- dm_ms205 (4)Document14 pagesdm_ms205 (4)Doente PedroNo ratings yet
- Problem Set 7Document4 pagesProblem Set 7clouds lauNo ratings yet
- Midterm SolutionDocument8 pagesMidterm SolutionranvNo ratings yet
- Honsanalworkshop9sol CMPLT PDFDocument5 pagesHonsanalworkshop9sol CMPLT PDFSomeoneNo ratings yet
- Additional Exercises for Convex OptimizationDocument152 pagesAdditional Exercises for Convex OptimizationSoumitra BhowmickNo ratings yet
- Singular Subelliptic Equations and Sobolev InequalDocument19 pagesSingular Subelliptic Equations and Sobolev InequalАйкын ЕргенNo ratings yet
- Gary Chamberlain Econometric SDocument152 pagesGary Chamberlain Econometric SGabriel RoblesNo ratings yet
- Additional Exercises for Convex OptimizationDocument116 pagesAdditional Exercises for Convex OptimizationQuoc Viet PhamNo ratings yet
- This Study Resource Was: CS191x Assignment 1 SolutionsDocument5 pagesThis Study Resource Was: CS191x Assignment 1 SolutionslolnationNo ratings yet
- Problem Set 6Document5 pagesProblem Set 6clouds lauNo ratings yet
- Matching Polytope and Total Dual IntegralityDocument4 pagesMatching Polytope and Total Dual IntegralityDavid HassonNo ratings yet
- Convex Optimization and System Theory: Kees Roos/A.A. Stoorvogel E-Mail: UrlDocument26 pagesConvex Optimization and System Theory: Kees Roos/A.A. Stoorvogel E-Mail: UrlAnonymous N3LpAXNo ratings yet
- SC 99 44Document51 pagesSC 99 44Deepak KushwahaNo ratings yet
- Weighted Residual Method for Solving Linear Elastic ProblemsDocument10 pagesWeighted Residual Method for Solving Linear Elastic ProblemsHuma BaigNo ratings yet
- Additional Exercises for Convex OptimizationDocument192 pagesAdditional Exercises for Convex OptimizationThe DudeNo ratings yet
- Set6b SolDocument9 pagesSet6b SolNikhil GargNo ratings yet
- MIT NoteDocument140 pagesMIT NoteWidmungNo ratings yet
- dg1 hw5 SolutionsDocument11 pagesdg1 hw5 Solutionschristophercabezas93No ratings yet
- Additional Exercises for Convex Optimization TopicsDocument152 pagesAdditional Exercises for Convex Optimization TopicsnudalaNo ratings yet
- The Finite Element Method For 2D Problems: Theorem 9.1Document47 pagesThe Finite Element Method For 2D Problems: Theorem 9.1Anita RahmawatiNo ratings yet
- Additional Exercises For Convex Optimization PDFDocument187 pagesAdditional Exercises For Convex Optimization PDFCliffordTorresNo ratings yet
- Midterm 2014Document23 pagesMidterm 2014Zeeshan Ali SayyedNo ratings yet
- AlgcombDocument6 pagesAlgcombSanjeev Kumar DasNo ratings yet
- Numerical Root-FindingDocument44 pagesNumerical Root-FindingABUBAKAR ALINo ratings yet
- Notes On The Lebesgue Integral: Revised, 9/5/2021Document10 pagesNotes On The Lebesgue Integral: Revised, 9/5/2021MRNo ratings yet
- Theorist's Toolkit Lecture 12: Semindefinite Programs and Tightening RelaxationsDocument4 pagesTheorist's Toolkit Lecture 12: Semindefinite Programs and Tightening RelaxationsJeremyKunNo ratings yet
- AYESIAN DECISION THEORY ProblemsDocument15 pagesAYESIAN DECISION THEORY ProblemsmohamadNo ratings yet
- Discrete Optimization Lecture Notes 5Document3 pagesDiscrete Optimization Lecture Notes 5BertvdvenNo ratings yet
- Kendall RoyDocument9 pagesKendall RoyEdward Aris FajardoNo ratings yet
- BÀI TẬP GT LỒIDocument127 pagesBÀI TẬP GT LỒIkhongtinNo ratings yet
- Vectors Notes IDocument14 pagesVectors Notes IJpricarioNo ratings yet
- 1 Review of Key Concepts From Previous Lectures: Lecture Notes - Amber Habib - December 1Document4 pages1 Review of Key Concepts From Previous Lectures: Lecture Notes - Amber Habib - December 1Christopher BellNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- 1) 30" (2) 1) D (2) (3) 5. (1) Direction Q) Directions (4) (L) 6 (Q) (3) Oderef 'Document1 page1) 30" (2) 1) D (2) (3) 5. (1) Direction Q) Directions (4) (L) 6 (Q) (3) Oderef 'Subhash KorumilliNo ratings yet
- Precision machining processes and toolsDocument1 pagePrecision machining processes and toolsSubhash KorumilliNo ratings yet
- T, L) Tuo": 5" 5 Q) Soot5Document1 pageT, L) Tuo": 5" 5 Q) Soot5Subhash KorumilliNo ratings yet
- Bs Od6: 3cD Scs IsDocument1 pageBs Od6: 3cD Scs IsSubhash KorumilliNo ratings yet
- Img 20201016 0002Document1 pageImg 20201016 0002Subhash KorumilliNo ratings yet
- Img 20201016 0006Document1 pageImg 20201016 0006Subhash KorumilliNo ratings yet
- Img 20201016 0001Document1 pageImg 20201016 0001Subhash KorumilliNo ratings yet
- Calculating Area FormulasDocument1 pageCalculating Area FormulasSubhash KorumilliNo ratings yet
- TL) ) Ss - : ,: 5: - I0. (1t RL'::: - 3 5u-Rlr IDocument1 pageTL) ) Ss - : ,: 5: - I0. (1t RL'::: - 3 5u-Rlr ISubhash KorumilliNo ratings yet
- Img 20200608 0002Document1 pageImg 20200608 0002Subhash KorumilliNo ratings yet
- Img 20201016 0004Document1 pageImg 20201016 0004Subhash KorumilliNo ratings yet
- How MOSFETs can be used in enhancement modeDocument1 pageHow MOSFETs can be used in enhancement modeSubhash KorumilliNo ratings yet
- Ri) Il T"-Fu'o F" 'Document1 pageRi) Il T"-Fu'o F" 'Subhash KorumilliNo ratings yet
- Img 20201016 0002Document1 pageImg 20201016 0002Subhash KorumilliNo ratings yet
- Img 20200706 0002 PDFDocument1 pageImg 20200706 0002 PDFSubhash KorumilliNo ratings yet
- Img 20200706 0001 PDFDocument1 pageImg 20200706 0001 PDFSubhash KorumilliNo ratings yet
- Img 20200706 0001 PDFDocument1 pageImg 20200706 0001 PDFSubhash KorumilliNo ratings yet
- Customer Receipt: Tag Account No. Licence Plate No. Vehicle Class Amount (RS.)Document1 pageCustomer Receipt: Tag Account No. Licence Plate No. Vehicle Class Amount (RS.)Subhash KorumilliNo ratings yet
- DinchakDocument1 pageDinchakSubhash KorumilliNo ratings yet
- Ade RojuDocument1 pageAde RojuSubhash KorumilliNo ratings yet
- Calculating loan interest and principal amountsDocument1 pageCalculating loan interest and principal amountsSubhash KorumilliNo ratings yet
- TestDocument1 pageTestjkwascomNo ratings yet
- How to safely store important documents onlineDocument1 pageHow to safely store important documents onlineSubhash KorumilliNo ratings yet
- TestDocument1 pageTestjkwascomNo ratings yet
- ICE Solved ProblemsDocument6 pagesICE Solved ProblemsRyan Christian RagasajoNo ratings yet
- Formulae for screw jack calculationsDocument24 pagesFormulae for screw jack calculationsNaw AzNo ratings yet
- A Simple PDFDocument2 pagesA Simple PDFJaheer MakalNo ratings yet
- Ce 371 Homework 4 1) A Plug in The Bottom of A Pressurized TankDocument4 pagesCe 371 Homework 4 1) A Plug in The Bottom of A Pressurized TankSubhash KorumilliNo ratings yet
- TestDocument1 pageTestjkwascomNo ratings yet
- Dummy PDFDocument1 pageDummy PDFSubhash KorumilliNo ratings yet
- Efficient Implementation of Superquadric Particles in DiscreteDocument18 pagesEfficient Implementation of Superquadric Particles in DiscretedavidusachNo ratings yet
- Problem Solvingusing Search - (Single Agent Search)Document18 pagesProblem Solvingusing Search - (Single Agent Search)Asim Arunava SahooNo ratings yet
- CIRCLESDocument3 pagesCIRCLESAswinNo ratings yet
- LEC2 Failure PatternsDocument18 pagesLEC2 Failure Patternsأحمد دعبسNo ratings yet
- Shortest Path Algorithms GuideDocument94 pagesShortest Path Algorithms GuideZryan MuhammedNo ratings yet
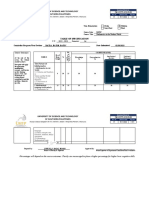
- FM-USTP-ACAD-08 Table of Specification (MMW - MIDTERM EXAM)Document2 pagesFM-USTP-ACAD-08 Table of Specification (MMW - MIDTERM EXAM)Cheryll PagalNo ratings yet
- Speed Time and DistanceDocument4 pagesSpeed Time and DistancePUNISHERNo ratings yet
- VISHVESHDocument21 pagesVISHVESHsnowNo ratings yet
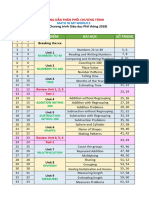
- Math in My World 3 - Phân Phối Chương Trình (Syllabus)Document2 pagesMath in My World 3 - Phân Phối Chương Trình (Syllabus)Luân Đỗ Thành LuânNo ratings yet
- Stability Analysis of Systems Using Routh-Hurwitz CriterionDocument32 pagesStability Analysis of Systems Using Routh-Hurwitz CriterionUmer AbbasNo ratings yet
- Trigonometry: Trigonometry (From Greek Trigōnon, "Triangle" and Metron, "Measure"Document4 pagesTrigonometry: Trigonometry (From Greek Trigōnon, "Triangle" and Metron, "Measure"praveen_449No ratings yet
- Test PaperDocument16 pagesTest Papersudhir_kumar_33No ratings yet
- Proving The Pythagorean TheoremDocument21 pagesProving The Pythagorean TheoremCarmen FloresNo ratings yet
- Solving Word Problems Using Quadratic EquationsDocument3 pagesSolving Word Problems Using Quadratic EquationsAnoop SreedharNo ratings yet
- Papert - 1993 - Rethinking School in The Age of The Computer-AnnotatedDocument30 pagesPapert - 1993 - Rethinking School in The Age of The Computer-AnnotatedElisângela Christiane Pinheiro LeiteNo ratings yet
- Mesl Elements 1Document7 pagesMesl Elements 1Backup Review Files YbanezNo ratings yet
- Math 10 1ST Quarter Exam 2023-24Document10 pagesMath 10 1ST Quarter Exam 2023-24ronnie.sisonNo ratings yet
- CMR College ECE Course File on Probability Theory and Random ProcessesDocument162 pagesCMR College ECE Course File on Probability Theory and Random Processesniharikarllameddy.kaNo ratings yet
- 10.1515 - Spma 2020 0125Document5 pages10.1515 - Spma 2020 0125Leng RyanNo ratings yet
- ECE133A Additional ExercisesDocument103 pagesECE133A Additional Exercisesmemex1100% (1)
- Determinants (Practice Question) PDFDocument9 pagesDeterminants (Practice Question) PDFAditya SanjayBoobNo ratings yet
- 2ndannual PMWC Team Test 1998 PDFDocument5 pages2ndannual PMWC Team Test 1998 PDFirwan syahNo ratings yet
- TARUC ELEMENTARY SCHOOL THIRD PERIODICAL TEST MATHEMATICS 4Document4 pagesTARUC ELEMENTARY SCHOOL THIRD PERIODICAL TEST MATHEMATICS 4Roxieth Comendador BokingkitoNo ratings yet
- AIR Basic Calculus Q3 W6 - Module 6Document19 pagesAIR Basic Calculus Q3 W6 - Module 6bonifacio gianga jrNo ratings yet
- Analyse FonctionnelleDocument193 pagesAnalyse Fonctionnelleantonio3141592No ratings yet
- Aerospace Engineer BiographiesDocument132 pagesAerospace Engineer BiographiesAviation/Space History LibraryNo ratings yet
- Rational Algebraic ExpressionsDocument11 pagesRational Algebraic ExpressionsApple Jean Yecyec Alag83% (6)
- Lecture Notes in Empirical Finance (MSc, PhDDocument360 pagesLecture Notes in Empirical Finance (MSc, PhDjamilkhannNo ratings yet
- PROBABILITY AND STATISTICS PROJECT REPORTDocument9 pagesPROBABILITY AND STATISTICS PROJECT REPORTSyamimi AtirahNo ratings yet
- PSQT Tutorial 1: Probability, Sample Space & SAS SoftwareDocument79 pagesPSQT Tutorial 1: Probability, Sample Space & SAS Softwarekowshik emmadisettyNo ratings yet