You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Vauxhall Zafira 'A' Owners ManualDocument283 pagesVauxhall Zafira 'A' Owners ManualKeetykat0% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Manual Ford Ranger Complete PDFDocument140 pagesManual Ford Ranger Complete PDFMiguel Angel Perez100% (4)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- CCJ The Air Brake Book 9th Edition PDFDocument100 pagesCCJ The Air Brake Book 9th Edition PDFAnthonyNo ratings yet
- 2012 MINI Cooper Clubman PDFDocument212 pages2012 MINI Cooper Clubman PDFLeonardo VieiraNo ratings yet
- 2016 Nissan Titan - Brake Control SystemDocument168 pages2016 Nissan Titan - Brake Control Systemcarlos cNo ratings yet
- Livable Streets: Through A Walkable InterventionDocument15 pagesLivable Streets: Through A Walkable InterventionDivyah RatheeshNo ratings yet
- Development of Variable Cooling System Aimed at Fuel Economy Improvement of Air-Cooled Engine For ScootersDocument8 pagesDevelopment of Variable Cooling System Aimed at Fuel Economy Improvement of Air-Cooled Engine For ScootersSam JacobNo ratings yet
- CRV 2019 ManualDocument769 pagesCRV 2019 ManualJuan In Nippon0% (1)
- Piston Engine 1 2017Document4 pagesPiston Engine 1 2017Training Manager SOA100% (1)
- MRT Phase 2Document47 pagesMRT Phase 2hilmihilmi100% (1)
- Towing and Impounding FAQDocument4 pagesTowing and Impounding FAQGeorge JR BagsaoNo ratings yet
- 90 To Springfield MemoDocument7 pages90 To Springfield MemoJarred JohnsonNo ratings yet
- JGP650P5 Jgp700e5 PDFDocument875 pagesJGP650P5 Jgp700e5 PDFAya JiboNo ratings yet
- 33611B SUV & Light Truck Manufacturing in The US Industry ReportDocument38 pages33611B SUV & Light Truck Manufacturing in The US Industry ReportSubhash BabuNo ratings yet
- Touareg 2011 Chassis and Four Wheel DriveDocument60 pagesTouareg 2011 Chassis and Four Wheel DriveAntónio Fernandes100% (1)
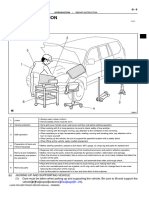
- Repair Instruction: PrecautionDocument18 pagesRepair Instruction: PrecautionJosemar AgostinhoNo ratings yet
- SFC FormatDocument39 pagesSFC FormatAnil SuryawanshiNo ratings yet
- Isbt ChandiGarh SECTOR 17Document3 pagesIsbt ChandiGarh SECTOR 17Ubaid Khan0% (2)
- Test Results of Gradation For WMM: Lab ID: GCS-TR-02-40602-010 04.06.2014 DateDocument7 pagesTest Results of Gradation For WMM: Lab ID: GCS-TR-02-40602-010 04.06.2014 DateKartik KandangkelNo ratings yet
- Traffic Road SafetyDocument23 pagesTraffic Road Safetyjingky SallicopNo ratings yet
- Car Suspension SystemDocument17 pagesCar Suspension SystemDheeraj Kashyap100% (1)
- 03 6720169 EL 200216 enDocument137 pages03 6720169 EL 200216 enhoiNo ratings yet
- Typical Cross SectionDocument8 pagesTypical Cross SectionAmit PhadatareNo ratings yet
- Three-Phase Induction Motors PDFDocument32 pagesThree-Phase Induction Motors PDFDimitriu CarmenNo ratings yet
- CAT 3208-TroubleshootingDocument8 pagesCAT 3208-TroubleshootingMiguel Angel SanchoNo ratings yet
- Wheel Slide ProtectionDocument23 pagesWheel Slide ProtectionÀnkit MishràNo ratings yet
- ES CE - Civil Engineering Orientation Lecture Notes - 6Document3 pagesES CE - Civil Engineering Orientation Lecture Notes - 6Mae TadaNo ratings yet
- Bus Rapid TransitDocument13 pagesBus Rapid TransitNur AtierahNo ratings yet
- Touch Up Paint & Body Paint Color Number Chart: ToyotaDocument16 pagesTouch Up Paint & Body Paint Color Number Chart: ToyotaSurya FratamaNo ratings yet
- Model 35R68 (14D) Rigid Planetary Axle: Rigorous Structure For Mining Trucks and Mining Load Haul DumpersDocument2 pagesModel 35R68 (14D) Rigid Planetary Axle: Rigorous Structure For Mining Trucks and Mining Load Haul DumpersMarek WyszatyckiNo ratings yet