You might also like
- The Concise 48 Laws of Power PDFDocument203 pagesThe Concise 48 Laws of Power PDFkaran kamath100% (1)
- Baath Arab Socialist Party - Constitution (Approved in 1947)Document9 pagesBaath Arab Socialist Party - Constitution (Approved in 1947)Antonio de OdilonNo ratings yet
- Nutrition and Diet Therapy ExaminationDocument8 pagesNutrition and Diet Therapy ExaminationIrwan M. Iskober100% (3)
- Dispeller of Obstacles PDFDocument276 pagesDispeller of Obstacles PDFLie Christin Wijaya100% (4)
- 1 s2.0 S0141635912001407 MainDocument9 pages1 s2.0 S0141635912001407 Mainİsmail KoçNo ratings yet
- 2014 Ferroscan Probabilistic NDT Data Fusion of FerroscDocument5 pages2014 Ferroscan Probabilistic NDT Data Fusion of Ferroscalcides seguraNo ratings yet
- 1 s2.0 S1000936120304520 MainDocument20 pages1 s2.0 S1000936120304520 MainFlávia de Souza BastosNo ratings yet
- Design and Fabrication of Tensegrity StructuresDocument10 pagesDesign and Fabrication of Tensegrity StructuresNguyễn Đình PhongNo ratings yet
- Balaji Et Al. - 2021 - Reduced Order Modeling For The Dynamics of JointedDocument38 pagesBalaji Et Al. - 2021 - Reduced Order Modeling For The Dynamics of JointedNidish NarayanaaNo ratings yet
- Transiton BoundariesDocument13 pagesTransiton BoundariesShoaib MalikNo ratings yet
- Generalized Finite Element Formulation of Fiber Beam Elements For Distributed Plasticity in Multiple RegionsDocument18 pagesGeneralized Finite Element Formulation of Fiber Beam Elements For Distributed Plasticity in Multiple RegionsVictoriawan MuhammadNo ratings yet
- Alternative View On Geotechnical Parameters ForDocument14 pagesAlternative View On Geotechnical Parameters ForbrodieNo ratings yet
- 1 s2.0 S0263822321003755 MainDocument9 pages1 s2.0 S0263822321003755 MainMusic TrapsNo ratings yet
- Stress-Based Tool-Path Planning Methodology For Fused Filament FabricationDocument13 pagesStress-Based Tool-Path Planning Methodology For Fused Filament FabricationRancho vonNo ratings yet
- Fussl Et Al (2018)Document14 pagesFussl Et Al (2018)jferreiraNo ratings yet
- Engineering C61 PutersDocument17 pagesEngineering C61 PutersMirceaNo ratings yet
- 07 - Chapter 2Document17 pages07 - Chapter 2Libu GeorgebabuNo ratings yet
- Acta Materialia: Wentao Yan, Wenjun Ge, Ya Qian, Stephen Lin, Bin Zhou, Wing Kam Liu, Feng Lin, Gregory J. WagnerDocument10 pagesActa Materialia: Wentao Yan, Wenjun Ge, Ya Qian, Stephen Lin, Bin Zhou, Wing Kam Liu, Feng Lin, Gregory J. WagnerkishoreNo ratings yet
- 1 s2.0 S1359836821007496 MainDocument17 pages1 s2.0 S1359836821007496 Maincm.torvergataNo ratings yet
- Influence of Choice of Flac and Plaxis PDFDocument11 pagesInfluence of Choice of Flac and Plaxis PDFCharles RuizNo ratings yet
- Formulation and Application of SMUDocument31 pagesFormulation and Application of SMUAndrea GennaroNo ratings yet
- PaperID 2237Document8 pagesPaperID 2237Makelo AlvarezNo ratings yet
- Composite Structures: Van-Nam Hoang, Phuong Tran, Van-Tuyen Vu, H. Nguyen-XuanDocument13 pagesComposite Structures: Van-Nam Hoang, Phuong Tran, Van-Tuyen Vu, H. Nguyen-Xuanezbai Aparicio SandovalNo ratings yet
- Comparative Analysis of Strut-And-Tie Models Using Smooth Evolutionary Structural OptimizationDocument11 pagesComparative Analysis of Strut-And-Tie Models Using Smooth Evolutionary Structural OptimizationMohammad AshrafyNo ratings yet
- An Energy-Based Vibration Model For Beam Bridges With Multiple ConstraintsDocument14 pagesAn Energy-Based Vibration Model For Beam Bridges With Multiple ConstraintsGogyNo ratings yet
- SimAUD-2018 Shilova MurugeshDocument8 pagesSimAUD-2018 Shilova MurugeshElena ShilovaNo ratings yet
- Zhao 2021Document20 pagesZhao 2021Nandeesh SreenivasappaNo ratings yet
- Validation of 3d FE Piled RaftDocument15 pagesValidation of 3d FE Piled RaftAndersonNo ratings yet
- Hybrid Modeling of Complex Surfaces Using Catia V5Document4 pagesHybrid Modeling of Complex Surfaces Using Catia V5babrolNo ratings yet
- 17 05 HierarchSpaceStructDocument10 pages17 05 HierarchSpaceStructBenjamin JenettNo ratings yet
- A Simulation Model For Spatial Scheduling of Dynamic Block Assembly in ShipbuildingDocument10 pagesA Simulation Model For Spatial Scheduling of Dynamic Block Assembly in Shipbuildingmahmoud hosnyNo ratings yet
- Deformable Model Fitting by Regularized Landmark Mean-Shift: Simon Lucey Jeffrey F. CohnDocument16 pagesDeformable Model Fitting by Regularized Landmark Mean-Shift: Simon Lucey Jeffrey F. CohnasoidjaodijsaNo ratings yet
- Near Optimum Selection of Module Configuration For Efficient Modular ConstructionDocument10 pagesNear Optimum Selection of Module Configuration For Efficient Modular ConstructionIan MannNo ratings yet
- Engineering Structures: Mohsen Zaker Esteghamati, Madeleine M. FlintDocument14 pagesEngineering Structures: Mohsen Zaker Esteghamati, Madeleine M. FlintANUBHAV CHAUDHARYNo ratings yet
- Topological Optimization of Beam Cross Section by Employing Extrusion ConstraintDocument11 pagesTopological Optimization of Beam Cross Section by Employing Extrusion ConstraintGogyNo ratings yet
- Constraint EsDocument8 pagesConstraint EsGetachew MekuriawNo ratings yet
- Studies of Refinement and Continuity in IsogeometrDocument25 pagesStudies of Refinement and Continuity in IsogeometrJorge Luis Garcia ZuñigaNo ratings yet
- Computers and Geotechnics: Shaoqun Dong, Lianbo Zeng, Peter Dowd, Chaoshui Xu, Han CaoDocument12 pagesComputers and Geotechnics: Shaoqun Dong, Lianbo Zeng, Peter Dowd, Chaoshui Xu, Han CaoDiego Tafur LópezNo ratings yet
- Evolutionary Design of Mechanical Linkages: Amanda Ghassaei Ghassaei@mit - Edu Joy Ming Jming@college - Harvard.eduDocument12 pagesEvolutionary Design of Mechanical Linkages: Amanda Ghassaei Ghassaei@mit - Edu Joy Ming Jming@college - Harvard.eduAndy ReynoldsNo ratings yet
- 1 s2.0 S0045794917300639 MainDocument15 pages1 s2.0 S0045794917300639 MainkgapuNo ratings yet
- Learning From Demonstration For Autonomous Navigation in Complex Unstructured TerrainDocument32 pagesLearning From Demonstration For Autonomous Navigation in Complex Unstructured Terrainezamora1981No ratings yet
- Modal Pushover-Based Scaling of Two Components of Ground Motion Records For Nonlinear RHA of BuildingsDocument7 pagesModal Pushover-Based Scaling of Two Components of Ground Motion Records For Nonlinear RHA of Buildingsmajid heidariNo ratings yet
- Combined Method of Datum Transformation Between Different Coordinate SystemsDocument6 pagesCombined Method of Datum Transformation Between Different Coordinate SystemsHtoo WaiNo ratings yet
- J 31 Qian SureshDocument30 pagesJ 31 Qian Sureshcombatps1No ratings yet
- 1 s2.0 S1359836817304985 Main PDFDocument14 pages1 s2.0 S1359836817304985 Main PDFGustavo Jordi Juarez TrujilloNo ratings yet
- Modal Identification of High-Rise Buildings Under EarthquakeDocument18 pagesModal Identification of High-Rise Buildings Under Earthquakezhengyifu138No ratings yet
- Design and Fabrication of Periodic Lattice-Based Cellular StructuresDocument13 pagesDesign and Fabrication of Periodic Lattice-Based Cellular StructuresYusuf YamanerNo ratings yet
- 1 s2.0 S0022509623001862 MainDocument29 pages1 s2.0 S0022509623001862 Main231147132No ratings yet
- Finite Elements in Analysis and Design: Mariano Victoria, Osvaldo M. Querin, Pascual MartıDocument9 pagesFinite Elements in Analysis and Design: Mariano Victoria, Osvaldo M. Querin, Pascual MartıNikNo ratings yet
- Journal of Terramechanics: Yaron Franco, Michal Shani, Gilad Gat, Itzhak ShmulevichDocument11 pagesJournal of Terramechanics: Yaron Franco, Michal Shani, Gilad Gat, Itzhak ShmulevichJose Garcia NovoaNo ratings yet
- Finite Element Model Updating Multiple AlternativesDocument7 pagesFinite Element Model Updating Multiple AlternativesIamzura AbdullahNo ratings yet
- Feart 11 1112105Document16 pagesFeart 11 1112105Lucas GusmaoNo ratings yet
- 3 Kief PRS-Neoweb-Structural Pavement Design With Geocells-Geo2015aDocument10 pages3 Kief PRS-Neoweb-Structural Pavement Design With Geocells-Geo2015aJose FernandoNo ratings yet
- Interactive 3D CAD Generation of Tensegrity Structures by Charalambides, LiapiDocument6 pagesInteractive 3D CAD Generation of Tensegrity Structures by Charalambides, LiapiTensegrity WikiNo ratings yet
- Prediction and Design of Mechanical Properties of Origami-Inspired Braces Based On Machine LearningDocument21 pagesPrediction and Design of Mechanical Properties of Origami-Inspired Braces Based On Machine LearningAnh NguyễnNo ratings yet
- Applsci 13 08971Document29 pagesApplsci 13 08971shastry_vishNo ratings yet
- 3D FEA of Railway Track-IIT DelhiDocument4 pages3D FEA of Railway Track-IIT DelhiSajid IqbalNo ratings yet
- Sensors 23 00221Document16 pagesSensors 23 00221Nilton Rodrigues CantanhêdeNo ratings yet
- Engineering Structures: Jingzhou Xin, Yan Jiang, Jianting Zhou, Liuliu Peng, Shuoyu Liu, Qizhi TangDocument16 pagesEngineering Structures: Jingzhou Xin, Yan Jiang, Jianting Zhou, Liuliu Peng, Shuoyu Liu, Qizhi TangSérgio CustódioNo ratings yet
- Computational Simulation and Optimization of Functionally Graded Auxetic Structures Made From Inverted TetrapodsDocument7 pagesComputational Simulation and Optimization of Functionally Graded Auxetic Structures Made From Inverted TetrapodsRodrigoNo ratings yet
- Variation Simulation For Deformable Sheet Metal Assemblies Using Finite Element MethodsDocument7 pagesVariation Simulation For Deformable Sheet Metal Assemblies Using Finite Element MethodsCesar de la LuzNo ratings yet
- Conceptual Design of Modular Bridges Including Layout Optimization and Component ReusabilityDocument13 pagesConceptual Design of Modular Bridges Including Layout Optimization and Component Reusabilitypraveen kumarNo ratings yet
- Integrated Imaging of the Earth: Theory and ApplicationsFrom EverandIntegrated Imaging of the Earth: Theory and ApplicationsMax MoorkampNo ratings yet
- Basic Structured Grid Generation: With an introduction to unstructured grid generationFrom EverandBasic Structured Grid Generation: With an introduction to unstructured grid generationNo ratings yet
- Developments in Unmanned Powered Parachute Aerial Vehicle: A ReviewDocument15 pagesDevelopments in Unmanned Powered Parachute Aerial Vehicle: A ReviewLalit BholaNo ratings yet
- Worksheet For Jocko Willink - Why Discipline Beats Motivation Every Time (Episode 15)Document12 pagesWorksheet For Jocko Willink - Why Discipline Beats Motivation Every Time (Episode 15)Lalit BholaNo ratings yet
- Manisha Bhola: Business ExecutiveDocument2 pagesManisha Bhola: Business ExecutiveLalit BholaNo ratings yet
- National Lnformatlon: LlnicriDocument26 pagesNational Lnformatlon: LlnicriLalit BholaNo ratings yet
- Aero-Structural Analysis of Corrugated Morphing Wing With Spanwise Camber ChangeDocument9 pagesAero-Structural Analysis of Corrugated Morphing Wing With Spanwise Camber ChangeLalit BholaNo ratings yet
- Baccha PartyDocument1 pageBaccha PartyLalit BholaNo ratings yet
- 2 07-ModalDocument12 pages2 07-ModalLalit BholaNo ratings yet
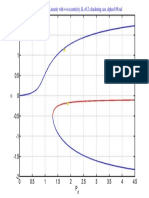
- Case 1: Cubic Non-Linearity With +ve Eccentricity, K: 0.2 A Hardening Case, Alpha 0.08 RadDocument1 pageCase 1: Cubic Non-Linearity With +ve Eccentricity, K: 0.2 A Hardening Case, Alpha 0.08 RadLalit BholaNo ratings yet
- From The SAGE Social Science Collections. All Rights ReservedDocument8 pagesFrom The SAGE Social Science Collections. All Rights ReservedLalit BholaNo ratings yet
- Spectral Finite Element Analysis of Buckling in Delaminated BeamDocument1 pageSpectral Finite Element Analysis of Buckling in Delaminated BeamLalit BholaNo ratings yet
- Case 1: Cubic Non-Linearity With +ve Eccentricity, K: 0.2 A Hardening Case, Alpha 0.08 RadDocument6 pagesCase 1: Cubic Non-Linearity With +ve Eccentricity, K: 0.2 A Hardening Case, Alpha 0.08 RadLalit BholaNo ratings yet
- Contemporary Watchdogs Domesticated: Conduct of Punjabi Print Media in Punjab During The Assembly Elections of 2007Document20 pagesContemporary Watchdogs Domesticated: Conduct of Punjabi Print Media in Punjab During The Assembly Elections of 2007Sarban MalhansNo ratings yet
- ECON2100 CO Abdool W21Document5 pagesECON2100 CO Abdool W21Imran AbdoolNo ratings yet
- Modern Prometheus Editing The HumanDocument399 pagesModern Prometheus Editing The HumanHARTK 70No ratings yet
- Chanakya National Law UniversityDocument23 pagesChanakya National Law Universityshubham kumarNo ratings yet
- GEHealthcare Brochure - Discovery CT590 RT PDFDocument12 pagesGEHealthcare Brochure - Discovery CT590 RT PDFAnonymous ArdclHUONo ratings yet
- Adobe Voice Assessment Tool-FinalDocument1 pageAdobe Voice Assessment Tool-Finalapi-268484302No ratings yet
- Classroom Management PaperDocument7 pagesClassroom Management PaperdessyutamiNo ratings yet
- Procedures: Step 1 Freeze or Restrain The Suspect/sDocument5 pagesProcedures: Step 1 Freeze or Restrain The Suspect/sRgenieDictadoNo ratings yet
- Unilateral Lower Limb SwellingDocument1 pageUnilateral Lower Limb SwellingLilius TangNo ratings yet
- EAM Appendices ICARDocument914 pagesEAM Appendices ICARsumankumarm869833No ratings yet
- Functions of Communication Oral Communication PDFDocument12 pagesFunctions of Communication Oral Communication PDFKrystle Francess Barrios0% (1)
- RECAP Lecture 7: FA of EVEN EVEN, FA Corresponding To Finite Languages (Using Both Methods), Transition GraphsDocument23 pagesRECAP Lecture 7: FA of EVEN EVEN, FA Corresponding To Finite Languages (Using Both Methods), Transition GraphsMuhammad EahteshamNo ratings yet
- NB-CPD IR 4r1 - Guidance For SGs On Their Role and Working MethodsDocument19 pagesNB-CPD IR 4r1 - Guidance For SGs On Their Role and Working MethodsmingulNo ratings yet
- RARC Letter To Tan Seri Razali Ismail July 26-2013Document4 pagesRARC Letter To Tan Seri Razali Ismail July 26-2013Rohingya VisionNo ratings yet
- Adjective Clauses: Relative Pronouns & Relative ClausesDocument4 pagesAdjective Clauses: Relative Pronouns & Relative ClausesJaypee MelendezNo ratings yet
- 5909 East Kaviland AvenueDocument1 page5909 East Kaviland Avenueapi-309853346No ratings yet
- Gamify Your Classroom - A Field Guide To Game-Based Learning, Revised EditionDocument372 pagesGamify Your Classroom - A Field Guide To Game-Based Learning, Revised EditionCuong Tran VietNo ratings yet
- 4.1 Genetic Counselling 222Document12 pages4.1 Genetic Counselling 222Sahar JoshNo ratings yet
- "International Finance": A Project Submitted ToDocument6 pages"International Finance": A Project Submitted ToAkshay HarekarNo ratings yet
- CH 13 ArqDocument6 pagesCH 13 Arqneha.senthilaNo ratings yet
- Crim Pro Exam Sheet at A Glance.Document5 pagesCrim Pro Exam Sheet at A Glance.Heather Kinsaul Foster80% (5)
- Nurse Implemented Goal Directed Strategy To.97972Document7 pagesNurse Implemented Goal Directed Strategy To.97972haslinaNo ratings yet
- BRP 40k Second Edition 2col PDFDocument54 pagesBRP 40k Second Edition 2col PDFColin BrettNo ratings yet
- Equal Protection and Public Education EssayDocument6 pagesEqual Protection and Public Education EssayAccount YanguNo ratings yet
- Subject: Animal Breeding and Genetics - II Course Code: ABG-301Document2 pagesSubject: Animal Breeding and Genetics - II Course Code: ABG-301Hamid Ali AfridiNo ratings yet
- Your ManDocument5 pagesYour ManPaulino JoaquimNo ratings yet