You might also like
- Challan Form-21-05-2014 PDFDocument1 pageChallan Form-21-05-2014 PDFAila DarNo ratings yet
- Challan FormDocument1 pageChallan FormFurqan ButtNo ratings yet
- Challan FormDocument1 pageChallan FormFurqan ButtNo ratings yet
- Regime Hydraulic Concepts and Equations Klang River Malasiya PDFDocument11 pagesRegime Hydraulic Concepts and Equations Klang River Malasiya PDFAhsan MurtazaNo ratings yet
- Challan FormDocument1 pageChallan FormFurqan ButtNo ratings yet
- Usman Ahmad: Work Experience Soft SkillsDocument1 pageUsman Ahmad: Work Experience Soft SkillsAhsan MurtazaNo ratings yet
- 317 671 1 PB PDFDocument7 pages317 671 1 PB PDFshahqazwsxNo ratings yet
- 1-Roughness Evaluation ShotcreteDocument18 pages1-Roughness Evaluation ShotcreteAhsan MurtazaNo ratings yet
- 317 671 1 PB PDFDocument7 pages317 671 1 PB PDFshahqazwsxNo ratings yet
- 317 671 1 PB PDFDocument7 pages317 671 1 PB PDFshahqazwsxNo ratings yet
- RoughnessDocument7 pagesRoughnesssptbalaNo ratings yet
- Schedule of DrawingsDocument4 pagesSchedule of DrawingsAhsan MurtazaNo ratings yet
- RoughnessDocument7 pagesRoughnesssptbalaNo ratings yet
- Blaney Criddle Example Data PDFDocument23 pagesBlaney Criddle Example Data PDFAhsan MurtazaNo ratings yet
- Balochistan PPRA RulesDocument42 pagesBalochistan PPRA RulesKhan FahadNo ratings yet
- Gradually Varied FlowDocument8 pagesGradually Varied FlowjoseNo ratings yet
- Total Score: 400: Entry Test 2019 StatisticsDocument3 pagesTotal Score: 400: Entry Test 2019 StatisticsabdullahriazNo ratings yet
- Project Cost Estimate (@ Dec 2016 Price Level)Document1 pageProject Cost Estimate (@ Dec 2016 Price Level)Ahsan MurtazaNo ratings yet
- Balochistan PPRA RulesDocument42 pagesBalochistan PPRA RulesKhan FahadNo ratings yet
- Total Score: 400: Entry Test 2019 StatisticsDocument3 pagesTotal Score: 400: Entry Test 2019 StatisticsabdullahriazNo ratings yet
- Total Score: 400: Entry Test 2019 StatisticsDocument3 pagesTotal Score: 400: Entry Test 2019 StatisticsabdullahriazNo ratings yet
- World Environmental Day 2019 ProgramDocument2 pagesWorld Environmental Day 2019 ProgramAhsan MurtazaNo ratings yet
- Sedimennt Transport Technology in PakDocument65 pagesSedimennt Transport Technology in PakAhsan MurtazaNo ratings yet
- Urdu Computing Standards: Urdu Zabta Takhti (UZT) 1.01Document6 pagesUrdu Computing Standards: Urdu Zabta Takhti (UZT) 1.01Ahsan MurtazaNo ratings yet
- GHE-08-Tariq-Ch-08 Hydrogeologic Investigations For GroundwaterDocument14 pagesGHE-08-Tariq-Ch-08 Hydrogeologic Investigations For GroundwaterAhsan MurtazaNo ratings yet
- 2.1 L-05 BoundaryInitialDocument33 pages2.1 L-05 BoundaryInitialRon BalbedinaNo ratings yet
- A Review of Water HammerDocument28 pagesA Review of Water HammerAhsan MurtazaNo ratings yet
- Assignment#02 Energy CurvesDocument31 pagesAssignment#02 Energy CurvesAhsan MurtazaNo ratings yet
- Assignment#02 Energy CurvesDocument31 pagesAssignment#02 Energy CurvesAhsan MurtazaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 2304 Tubing ASTM A789 / ASME SA789 S32304 1.4362 Duplex Steel TubeDocument13 pages2304 Tubing ASTM A789 / ASME SA789 S32304 1.4362 Duplex Steel TubeGonzalo MazaNo ratings yet
- Iso 679 2009Document12 pagesIso 679 2009HanifNo ratings yet
- LSL Beam and HeaderDocument36 pagesLSL Beam and HeadersteveNo ratings yet
- PP Aaa PP1 105Document21 pagesPP Aaa PP1 105Rabah AmidiNo ratings yet
- 2301 Woodward Speed ControlDocument4 pages2301 Woodward Speed ControlManuel Otero100% (1)
- Tensile & Elongation PVC Compound VC 8500 BKR VC 8751 BKI VC 8751 GRI - 15102019Document1 pageTensile & Elongation PVC Compound VC 8500 BKR VC 8751 BKI VC 8751 GRI - 15102019Vinh DuongvanNo ratings yet
- Hwang Et All Analytical Model For Predicting Shear Strengths of Interior Reinforced Concrete Beam Column Joints For Seismic PDFDocument14 pagesHwang Et All Analytical Model For Predicting Shear Strengths of Interior Reinforced Concrete Beam Column Joints For Seismic PDFEduardo MarquesNo ratings yet
- Refluxing Condensation Systems (Dephlegmators)Document21 pagesRefluxing Condensation Systems (Dephlegmators)jdgh1986100% (1)
- Intermot - Iam Complete CatalogueDocument111 pagesIntermot - Iam Complete CatalogueChristian StalinNo ratings yet
- Series 4300 Vertical In-Line: SubmittalDocument2 pagesSeries 4300 Vertical In-Line: SubmittalBrianNo ratings yet
- F56449 and F56450 Recommended Parts Per Maintenance IntervalDocument31 pagesF56449 and F56450 Recommended Parts Per Maintenance Intervalanwar sadatNo ratings yet
- Power Industry Appl GuideDocument38 pagesPower Industry Appl GuidePetrovich1No ratings yet
- Selva - Expert'STips, Cleaning Mechanical MovementsDocument2 pagesSelva - Expert'STips, Cleaning Mechanical MovementsFeelxxNo ratings yet
- Wild Well Technical Data Book - Technical-Data-BookDocument79 pagesWild Well Technical Data Book - Technical-Data-Booksharafudheen_sNo ratings yet
- Sheetpile CalculationDocument2 pagesSheetpile CalculationTeddy TPNo ratings yet
- Transmotauto 2015Document107 pagesTransmotauto 2015zoragiNo ratings yet
- Astm E111-97Document7 pagesAstm E111-97Uri Sterin100% (2)
- Ǘǚǟǚǜǚǧǒ Ǘnjǝǘnj Engine Oils: Ambra Mastergold HSP 10W-30 Ambra Mastergold HSP 15W-40Document38 pagesǗǚǟǚǜǚǧǒ Ǘnjǝǘnj Engine Oils: Ambra Mastergold HSP 10W-30 Ambra Mastergold HSP 15W-40Orkhan Manouchehri-LaleyiNo ratings yet
- Glean AirDocument2 pagesGlean AirMan CangkulNo ratings yet
- Air Cooler Cleaner (Acc) Is A Liquid Blend of Highly Active CleaningDocument5 pagesAir Cooler Cleaner (Acc) Is A Liquid Blend of Highly Active CleaningAbdul AnisNo ratings yet
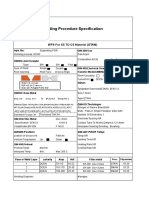
- Welding Procedure Specification: WPS For SS TO CS Material (GTAW)Document1 pageWelding Procedure Specification: WPS For SS TO CS Material (GTAW)Lipika GayenNo ratings yet
- Uav Introduction 4Document10 pagesUav Introduction 4Vijayanandh RNo ratings yet
- TV 20 2013 1 59 64 PDFDocument6 pagesTV 20 2013 1 59 64 PDFEduardo Caldas da RochaNo ratings yet
- Ex Motor Manual ML WebDocument156 pagesEx Motor Manual ML WebVíctor Josemaria Rivero DunoNo ratings yet
- Centrifugal PumpDocument6 pagesCentrifugal Pumpkadar AhmedNo ratings yet
- XE55DA: Hydraulic ExcavatorDocument2 pagesXE55DA: Hydraulic Excavatorproject adminNo ratings yet
- Bombas Vácuo PDFDocument199 pagesBombas Vácuo PDFMarcos Roberto Cardoso0% (1)
- E PR 491Document41 pagesE PR 491aizzuan_1No ratings yet
- DokwegII - Auxiliary - Maintenance Oil SystemDocument51 pagesDokwegII - Auxiliary - Maintenance Oil SystemCarlin BabuchasNo ratings yet