You might also like
- Nonlinear Traction Control Design for Parallel Hybrid VehiclesFrom EverandNonlinear Traction Control Design for Parallel Hybrid VehiclesNo ratings yet
- Xu Min 201709 MASc PDFDocument164 pagesXu Min 201709 MASc PDFanam abbasNo ratings yet
- Flight Control and Hardware Design of Multi-Rotor SystemsDocument123 pagesFlight Control and Hardware Design of Multi-Rotor Systemsapurva kumar singhNo ratings yet
- Model-Based Design For Automotive Control UnitDocument78 pagesModel-Based Design For Automotive Control UnitMohammed UvaisNo ratings yet
- Model-Based Design of A Satellite With OrthogonalDocument59 pagesModel-Based Design of A Satellite With Orthogonalsoros4No ratings yet
- Secure Vehicle Transportation using IoT SensorsDocument52 pagesSecure Vehicle Transportation using IoT Sensorspunam gavaliNo ratings yet
- A State of The Art Vehicle Study Mechatronics Focusing On Cable Systems Author Daniel Frede, Mohammad Khodabakhshian, Daniel MalmquistDocument67 pagesA State of The Art Vehicle Study Mechatronics Focusing On Cable Systems Author Daniel Frede, Mohammad Khodabakhshian, Daniel MalmquistAaron NyirendaNo ratings yet
- Quadrotor Trajectory Generation and Control for Transporting PayloadsDocument137 pagesQuadrotor Trajectory Generation and Control for Transporting PayloadsFENIL DESAINo ratings yet
- Design and Implementation of a Low-Cost SCARA RobotDocument52 pagesDesign and Implementation of a Low-Cost SCARA RobotMustafaMir100% (2)
- Preliminary Design of An Automatic Guided Vehicle (AGV) SystemDocument68 pagesPreliminary Design of An Automatic Guided Vehicle (AGV) SystemDanil KhardniNo ratings yet
- TesiDocument90 pagesTesikishor sahuNo ratings yet
- Digital Contract Management System Using BlockchainsDocument43 pagesDigital Contract Management System Using Blockchainswavhal maheshNo ratings yet
- SafetyDocument235 pagesSafetyRinda Purwanto IMM BontangNo ratings yet
- 7CEMM721 Final MSC (Dist) Thesis Report (Michael M. Wijetunge de Silva) Distribution VersionDocument64 pages7CEMM721 Final MSC (Dist) Thesis Report (Michael M. Wijetunge de Silva) Distribution VersionMichael M. W. de SilvaNo ratings yet
- Nonlinear Control of Mechatronic SystemsDocument134 pagesNonlinear Control of Mechatronic SystemsanuplonkarNo ratings yet
- Ceppi Thesis 2020Document163 pagesCeppi Thesis 2020Wanderson TeotonioNo ratings yet
- 2022 Next Generation Integrated Vehicle Dynamics and ControlsDocument209 pages2022 Next Generation Integrated Vehicle Dynamics and Controls杨旸No ratings yet
- Main PDFDocument96 pagesMain PDFbhushan_dhamdhere01No ratings yet
- Mobility Evaluation of Wheeled All Terrain Robots Metrics and ApplicationDocument130 pagesMobility Evaluation of Wheeled All Terrain Robots Metrics and Applicationtid_scribdNo ratings yet
- Licenta MecanicaDocument98 pagesLicenta MecanicaIonel AlexandruNo ratings yet
- R147isbn9512284170 PDFDocument81 pagesR147isbn9512284170 PDFSureshNo ratings yet
- Toyota Recalls Revealing The Value of SeDocument138 pagesToyota Recalls Revealing The Value of SeMohamed BayoumyNo ratings yet
- I001256219 ThesisDocument71 pagesI001256219 ThesisaliramezanidehajNo ratings yet
- Vorbach-cvorbach-meng-eecs-2022-thesisDocument84 pagesVorbach-cvorbach-meng-eecs-2022-thesisNungki SelviandroNo ratings yet
- Chalmers MPCDocument119 pagesChalmers MPCAyesha HameedNo ratings yet
- Bhagya Report FinalDocument73 pagesBhagya Report FinalRohan KashyapNo ratings yet
- Gilberto Mendoza - Final Thesis - 071716 PDFDocument114 pagesGilberto Mendoza - Final Thesis - 071716 PDFPhạm Văn HuyNo ratings yet
- Ohiou1174932976 PDFDocument252 pagesOhiou1174932976 PDFChristian Camilo Romero VeraNo ratings yet
- ReportDocument83 pagesReportKushal PrasadNo ratings yet
- Algorithmic SkeletonsDocument114 pagesAlgorithmic SkeletonsVijia VanNo ratings yet
- Thesis JLFDocument74 pagesThesis JLFensarkutukNo ratings yet
- Lu11PhD PDFDocument219 pagesLu11PhD PDFVijay KumarNo ratings yet
- Machine Learning For Well Rate Estimation: Integrated Imputation and Stacked Ensemble ModelingDocument118 pagesMachine Learning For Well Rate Estimation: Integrated Imputation and Stacked Ensemble ModelingAbdoo DadaNo ratings yet
- Bachelor of Technology: Magic Body ControlDocument29 pagesBachelor of Technology: Magic Body ControlTech DudeNo ratings yet
- Driver DrowinessDocument20 pagesDriver DrowinessSruthi ReddyNo ratings yet
- Controller Design and Experimental Validation For Connected Vehicle Systems Subject To Digital Effects and Stochastic Packet DropsDocument197 pagesController Design and Experimental Validation For Connected Vehicle Systems Subject To Digital Effects and Stochastic Packet DropsAditya NehraNo ratings yet
- Implementation of Brake-By-Wire System Using Flexray: ThesisDocument63 pagesImplementation of Brake-By-Wire System Using Flexray: ThesisabrishNo ratings yet
- AdaptiveCruise ModellingDocument91 pagesAdaptiveCruise ModellingVikram ReddyNo ratings yet
- Highspeedrobot WaterlooDocument114 pagesHighspeedrobot Waterloorajmeet singhNo ratings yet
- ASCET V6.4 Getting StartedDocument143 pagesASCET V6.4 Getting StartedcqlNo ratings yet
- Report Multiprocessor Scheduling Algorithm Implementation Using Genetic AlgorithmsDocument98 pagesReport Multiprocessor Scheduling Algorithm Implementation Using Genetic Algorithmstanmaya1991No ratings yet
- THESIS - M Civita - Integrated Modeling and Robust Control For Full-Envelope Flight of Robotic Helicopters PDFDocument133 pagesTHESIS - M Civita - Integrated Modeling and Robust Control For Full-Envelope Flight of Robotic Helicopters PDFhplchagasNo ratings yet
- Final ReportDocument42 pagesFinal Reportyash9022280080No ratings yet
- Automated Vehicle Electronic Control Unit (ECU) Sensor Location UDocument62 pagesAutomated Vehicle Electronic Control Unit (ECU) Sensor Location UAung Hlaing MinNo ratings yet
- Optimization of Hypersonic Airbreathing Propulsion Systems through Mixed Analysis MethodsDocument122 pagesOptimization of Hypersonic Airbreathing Propulsion Systems through Mixed Analysis MethodsSaraNo ratings yet
- Hcci EngineDocument155 pagesHcci Engineriyaz ahmedNo ratings yet
- Delft University of Technology: Design, Integration and Verification of The Delfi-n3Xt Reaction Wheel SystemDocument292 pagesDelft University of Technology: Design, Integration and Verification of The Delfi-n3Xt Reaction Wheel SystemMaman de AnisNo ratings yet
- Vehicle models for autonomous driving testsDocument118 pagesVehicle models for autonomous driving testsLiviu MihonNo ratings yet
- 20AE60R05 Nitin Sharma MTP-ReportDocument34 pages20AE60R05 Nitin Sharma MTP-ReportsayanNo ratings yet
- Modeling and Simulation of Mechatronic Systems Using SimscapeDocument42 pagesModeling and Simulation of Mechatronic Systems Using SimscapePavaniNo ratings yet
- A Reservation-Based Smart Parking SystemDocument62 pagesA Reservation-Based Smart Parking SystemzeljoydicangNo ratings yet
- Design of An Active-Assistance Balancing Mechanism For A BicycleDocument74 pagesDesign of An Active-Assistance Balancing Mechanism For A Bicyclebertan dağıstanlıNo ratings yet
- D14 ReportDocument40 pagesD14 ReportDhruv KhuranaNo ratings yet
- Four Wheel Stering SystemDocument59 pagesFour Wheel Stering Systemsamadhan khaireNo ratings yet
- Dynamic Identification of A Mitsubishi PA-10 Robotic ManipulatorDocument46 pagesDynamic Identification of A Mitsubishi PA-10 Robotic ManipulatorVu Khac KhaNo ratings yet
- Masters Thesis MonashDocument97 pagesMasters Thesis Monashmohit sonawaneNo ratings yet
- Clugston PDFDocument295 pagesClugston PDFdangthutqmNo ratings yet
- Model-Based Calibration of Automated TransmissionsDocument165 pagesModel-Based Calibration of Automated TransmissionsShivam KohliNo ratings yet
- Electro-Hydraulic Actuation Systems Design, Testing, Identification and ValidationDocument70 pagesElectro-Hydraulic Actuation Systems Design, Testing, Identification and ValidationAkbarmoradiNo ratings yet
- Report Template For Major Project For B Dot Tech SRM Institute of Science and TechnologyDocument22 pagesReport Template For Major Project For B Dot Tech SRM Institute of Science and TechnologyMm ImraanNo ratings yet
- Automotive Front Lightining Future MobilityDocument37 pagesAutomotive Front Lightining Future MobilityMm ImraanNo ratings yet
- I28 Kshitij Soni RA1411011010111 - Project Report - 2 PDFDocument53 pagesI28 Kshitij Soni RA1411011010111 - Project Report - 2 PDFMm ImraanNo ratings yet
- I28 Kshitij Soni RA1411011010111 - Project Report - 2 PDFDocument53 pagesI28 Kshitij Soni RA1411011010111 - Project Report - 2 PDFMm ImraanNo ratings yet
- NEWSDocument229 pagesNEWSМарат АлексеевNo ratings yet
- Tensor Flow Installation Guide PDFDocument41 pagesTensor Flow Installation Guide PDFMm ImraanNo ratings yet
- 2D Drawing Practise SolidworksDocument3 pages2D Drawing Practise SolidworksMm ImraanNo ratings yet
- Tensor Flow Installation Guide PDFDocument41 pagesTensor Flow Installation Guide PDFMm ImraanNo ratings yet
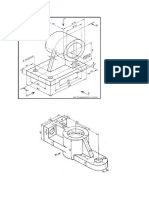
- 3D Drawing Practise by SolidworksDocument3 pages3D Drawing Practise by SolidworksMm ImraanNo ratings yet
- 3D Drawing Practise by SolidworksDocument3 pages3D Drawing Practise by SolidworksMm ImraanNo ratings yet
- How To Troubleshoot The ABS - Honda FIT - JAZZ 1G GD 2002-2007 DIY Repair GuideDocument11 pagesHow To Troubleshoot The ABS - Honda FIT - JAZZ 1G GD 2002-2007 DIY Repair GuidesozeNo ratings yet
- Turbocharger Principles and Components for Marine EngineersDocument14 pagesTurbocharger Principles and Components for Marine EngineersDodi SuhendraNo ratings yet
- The rebuild of a 1974 Kawasaki Z1A begins with dismantlingDocument4 pagesThe rebuild of a 1974 Kawasaki Z1A begins with dismantlingpraveshkutowarooNo ratings yet
- Ret VR123Document100 pagesRet VR123John AcunaNo ratings yet
- Tata Motors Entered The Passenger Vehicle Segment in The Year 1991 and Sierra Was Its First Offering in The Indian MarketDocument8 pagesTata Motors Entered The Passenger Vehicle Segment in The Year 1991 and Sierra Was Its First Offering in The Indian MarketLokanath ChoudhuryNo ratings yet
- Linked PDFDocument18 pagesLinked PDFroparts clujNo ratings yet
- Yanmar Models YSM8-R YSM8-Y YSM12-R YSM12-Y Marine Diesel EnginesDocument197 pagesYanmar Models YSM8-R YSM8-Y YSM12-R YSM12-Y Marine Diesel EnginesHal PalmerNo ratings yet
- Seat SuspensionDocument1 pageSeat SuspensionaliNo ratings yet
- Alfa Romeo Selespeed transmission systemDocument63 pagesAlfa Romeo Selespeed transmission systemDavid Felipe Lazo Libano85% (20)
- Parts and Working of Four Stroke Petrol EngineDocument6 pagesParts and Working of Four Stroke Petrol EngineHafeez AliNo ratings yet
- Honda Accord SRS - 10086206-2280Document6 pagesHonda Accord SRS - 10086206-2280tong SaetungNo ratings yet
- Press Release ENG Rear Axle RS1360Document2 pagesPress Release ENG Rear Axle RS1360Marko VujosevicNo ratings yet
- Backhus A30Document2 pagesBackhus A30Leo ManciniNo ratings yet
- Montesa Specification Sheets IndexDocument27 pagesMontesa Specification Sheets IndexpepmaesNo ratings yet
- 2009 Mack Granite Series (GU) Operator's ManualDocument300 pages2009 Mack Granite Series (GU) Operator's Manualsengottaiyan100% (6)
- EPRST1110Document4 pagesEPRST1110Joenet DarmawanNo ratings yet
- Cat 320Document16 pagesCat 320Achmad PrayogaNo ratings yet
- Timing Belt Installation - Skoda Octavia 14 TsiDocument1 pageTiming Belt Installation - Skoda Octavia 14 TsiMihai IonescuNo ratings yet
- XJ450 Workover Rig Technical SpecificationDocument8 pagesXJ450 Workover Rig Technical SpecificationADM MTC100% (1)
- QL-T4÷7 - Rev3 - Use & MaintenanceDocument62 pagesQL-T4÷7 - Rev3 - Use & MaintenanceJose ValeroNo ratings yet
- Electrical Component LocatorDocument20 pagesElectrical Component Locatorvixentd100% (1)
- 18 SOP For Heavy VehiclesDocument1 page18 SOP For Heavy Vehiclespabitra pandaNo ratings yet
- Service Training 3412-3625 - EngineDocument1,192 pagesService Training 3412-3625 - EngineTuan Pham100% (2)
- Engine Coolant 2 PDFDocument3 pagesEngine Coolant 2 PDFvictoverNo ratings yet
- I Read ..... I Learn: Discover Dts-Si Training Notes Dealer Development CenterDocument57 pagesI Read ..... I Learn: Discover Dts-Si Training Notes Dealer Development Centermayerly ariza50% (4)
- Electrical Component LocationsDocument59 pagesElectrical Component Locationsdanieldario33No ratings yet
- f2013-013 CASE N SBDocument11 pagesf2013-013 CASE N SBVictor PinedoNo ratings yet
- Form 20Document4 pagesForm 20Rohit JainNo ratings yet
- Dodge Chrysler Eagle 1993 1996 Parts CatalogDocument20 pagesDodge Chrysler Eagle 1993 1996 Parts Catalogcrystal100% (45)
- IRacing Car Setup GuideDocument22 pagesIRacing Car Setup GuideJonathan Perl GarridoNo ratings yet