You might also like
- Robotics LAB MANUAL MAEDocument24 pagesRobotics LAB MANUAL MAEIsh Shilp100% (2)
- Design, Simulation, and Analysis of A 6-Axis Robot Using Robot Visualization SoftwareDocument10 pagesDesign, Simulation, and Analysis of A 6-Axis Robot Using Robot Visualization Softwareswag bucksNo ratings yet
- Marcin SZAREK, Gözde ÖZCAN (Biped Robot)Document13 pagesMarcin SZAREK, Gözde ÖZCAN (Biped Robot)Mspavan RaoNo ratings yet
- Ee Assignment 1Document13 pagesEe Assignment 1Aman AnandNo ratings yet
- PPP P PPP P PP PP P PPPPPPP PP PPPPPPP PPP PPPPPPP PPP PP PP PPPPP PPPPPDocument8 pagesPPP P PPP P PP PP P PPPPPPP PP PPPPPPP PPP PPPPPPP PPP PP PP PPPPP PPPPPHanani HasniNo ratings yet
- Design and 3D Print of An Explorer RobotDocument11 pagesDesign and 3D Print of An Explorer RobotAnonymous LO5DSEUNo ratings yet
- How To Make A Humanoid RobotDocument9 pagesHow To Make A Humanoid RobotC SYAHBANANo ratings yet
- Moon Lander SimulatorDocument20 pagesMoon Lander SimulatorB T ShashankNo ratings yet
- 06025563Document4 pages06025563Muhammad AbkaNo ratings yet
- GoodBoy 3D Printed Arduino Robot DogDocument22 pagesGoodBoy 3D Printed Arduino Robot DogLowell WhiteheadNo ratings yet
- How To Make A 3d Printed Model RocketDocument12 pagesHow To Make A 3d Printed Model Rocketapi-354933597100% (1)
- Two Wheel Self Balancing RobotDocument7 pagesTwo Wheel Self Balancing RobotTuấn AnhNo ratings yet
- 3D-Odometry For Rough Terrain - Towards Real 3D Navigation: Pierre Lamon and Roland SiegwartDocument7 pages3D-Odometry For Rough Terrain - Towards Real 3D Navigation: Pierre Lamon and Roland SiegwartTrương Đức BìnhNo ratings yet
- Delta Robot ThesisDocument5 pagesDelta Robot Thesisgj9vq5z0100% (2)
- CATIA Advanced Interview QuestionsDocument22 pagesCATIA Advanced Interview QuestionsPrasad ParkheNo ratings yet
- Self Balancing Robot ProposalDocument8 pagesSelf Balancing Robot ProposalbhanuNo ratings yet
- Spirobot: Spirographs SpirographDocument10 pagesSpirobot: Spirographs Spirographవారణాసిరవిసత్యలక్ష్మీనరసింహ. శాస్త్రిNo ratings yet
- RoboAnalyzerUserManual PDFDocument22 pagesRoboAnalyzerUserManual PDFOscar AvilesNo ratings yet
- Cad Cam - 22.12.15-1 PDFDocument87 pagesCad Cam - 22.12.15-1 PDFGuru MaheshNo ratings yet
- Sdh-2 Multi-Finger Gripper and Kuka Robot Animations For Real-Time Simulations of Robot-Hand-Control Strategies Using Open Source Software BlenderDocument9 pagesSdh-2 Multi-Finger Gripper and Kuka Robot Animations For Real-Time Simulations of Robot-Hand-Control Strategies Using Open Source Software BlenderGkkNo ratings yet
- Model Based DesignDocument4 pagesModel Based DesignSami H. O. SalihNo ratings yet
- Netshort DefinitionDocument6 pagesNetshort DefinitionLê ChíNo ratings yet
- AutoCAD Plant 3D System Tools VariablesDocument19 pagesAutoCAD Plant 3D System Tools VariablesAob April100% (4)
- Labcomp Part1 MdsDocument13 pagesLabcomp Part1 MdsPham LongNo ratings yet
- Autocad Plant 3D: Link LinkDocument1 pageAutocad Plant 3D: Link Linkaateka02No ratings yet
- GoodBoy 3D Printed Arduino Robot DogDocument27 pagesGoodBoy 3D Printed Arduino Robot Dogfran manNo ratings yet
- Color Based 6 DOF Sorting Robot With Real-Time Object DetectionDocument3 pagesColor Based 6 DOF Sorting Robot With Real-Time Object DetectionAli AzharNo ratings yet
- Chessbot - Final PaperDocument6 pagesChessbot - Final PaperSandeep KumarNo ratings yet
- Segway ProjectDocument12 pagesSegway ProjectNorzawani Md AkhirNo ratings yet
- Homebuilt: A Glove-Operated Robot: by Gaurav GautamDocument4 pagesHomebuilt: A Glove-Operated Robot: by Gaurav GautamAtakan GolNo ratings yet
- DEC50122 - PW5 (Procedure)Document5 pagesDEC50122 - PW5 (Procedure)keerthana murugeswaranNo ratings yet
- Catia Important Interview QuestionsDocument40 pagesCatia Important Interview QuestionsHarshwardhan Singh0% (1)
- How To Express Design Intent in Rhino 3D: White Paper November'09Document17 pagesHow To Express Design Intent in Rhino 3D: White Paper November'09fareed majeedNo ratings yet
- Solidworks Tutorial08 Bearingpuller English 08 LR PDFDocument39 pagesSolidworks Tutorial08 Bearingpuller English 08 LR PDFCarla BeardNo ratings yet
- Expressed in Terms of ParameterDocument4 pagesExpressed in Terms of ParameterRidaNo ratings yet
- Project Delta RobotDocument27 pagesProject Delta RobotRobert KodraNo ratings yet
- Parametric Modeling and Drafting of Knuckle Joint by APIDocument6 pagesParametric Modeling and Drafting of Knuckle Joint by APIabc defNo ratings yet
- Six-Servo Robot Arm Six-Servo Robot Arm 1Document19 pagesSix-Servo Robot Arm Six-Servo Robot Arm 1ahmad_medo1989yahooNo ratings yet
- Schematic From NetlistDocument12 pagesSchematic From Netlistyoucef88No ratings yet
- UT Austin Villa 2008: Standing On Two LegsDocument18 pagesUT Austin Villa 2008: Standing On Two LegsOvidiu-Marian PetrilaNo ratings yet
- ESP32 Small Robot Dog: Features FeaturesDocument12 pagesESP32 Small Robot Dog: Features FeaturesSidharth BeheraNo ratings yet
- MOTUS Open Source 3D Printed Robotic ArmDocument35 pagesMOTUS Open Source 3D Printed Robotic Armاقْرَأْ وَرَبُّكَ الْأَكْرَمُNo ratings yet
- Balancing Robot: SelfDocument17 pagesBalancing Robot: SelfsheshankNo ratings yet
- MOTUS Open Source 3D Printed Robotic ArmDocument34 pagesMOTUS Open Source 3D Printed Robotic ArmTF Escritório MGNo ratings yet
- LAB 3 - Verilog For Combinatorial Circuits: GoalsDocument7 pagesLAB 3 - Verilog For Combinatorial Circuits: GoalsJoey WangNo ratings yet
- Final ReportDocument17 pagesFinal ReportCan VarolNo ratings yet
- Lab 9Document21 pagesLab 9Nizar TayemNo ratings yet
- SUMO RobotDocument20 pagesSUMO RobotMatt's Santouz CchildNo ratings yet
- 20 Sim Reference 43Document1,064 pages20 Sim Reference 43fercho72169No ratings yet
- Kachow Finaldesignreport-1Document19 pagesKachow Finaldesignreport-1api-541885234No ratings yet
- Optimal State Feedback Control (Ball and Beam) : by Carion PeltonDocument20 pagesOptimal State Feedback Control (Ball and Beam) : by Carion PeltonRaushan KumarNo ratings yet
- Experiment - 01: Denvit and Hartenberg (DH) ParametersDocument6 pagesExperiment - 01: Denvit and Hartenberg (DH) ParametersManthan SinghNo ratings yet
- Final Report-2Document17 pagesFinal Report-2api-528480778No ratings yet
- Guide PDFDocument2 pagesGuide PDFNiraj TrivediNo ratings yet
- Kine Record1Document39 pagesKine Record1Abdul AneesNo ratings yet
- Presentation 40x16 LED SCROLLDocument15 pagesPresentation 40x16 LED SCROLLChiran AdhikariNo ratings yet
- Principales Teorias Comercio InternaconalDocument9 pagesPrincipales Teorias Comercio InternaconalTito HerreraNo ratings yet
- Dreamcast Architecture: Architecture of Consoles: A Practical Analysis, #9From EverandDreamcast Architecture: Architecture of Consoles: A Practical Analysis, #9No ratings yet
- Chapter 10 - Text AnalyticsDocument13 pagesChapter 10 - Text AnalyticsanshitaNo ratings yet
- Chetan PrakashDocument48 pagesChetan PrakashpatrickNo ratings yet
- Piston Vibrator BrochureDocument3 pagesPiston Vibrator BrochuregemagdyNo ratings yet
- Bernoulli Vs Newton: Lift Vs DragDocument4 pagesBernoulli Vs Newton: Lift Vs DragABHIJEETNo ratings yet
- Daily Practice Problems 2 PDFDocument2 pagesDaily Practice Problems 2 PDFFUN 360No ratings yet
- Setting Calculation of Oc and Ef RealyDocument1 pageSetting Calculation of Oc and Ef RealyManishPandya67% (3)
- Stratego AlgorithmsDocument74 pagesStratego AlgorithmsbobertstokesNo ratings yet
- Gating System Design (HPDC) - C3P SoftwareDocument6 pagesGating System Design (HPDC) - C3P SoftwareIndra Pratap SengarNo ratings yet
- Microsoft Excel Beginner'S Tutorial: Parts of The SheetDocument10 pagesMicrosoft Excel Beginner'S Tutorial: Parts of The Sheetdenmark de veraNo ratings yet
- Simplex Algorithm - WikipediaDocument20 pagesSimplex Algorithm - WikipediaGalata BaneNo ratings yet
- Polarization WavesDocument37 pagesPolarization WavesNil TaiiayNo ratings yet
- Handbook of Industrial Engineering Equations, Formulas and CalculationsDocument8 pagesHandbook of Industrial Engineering Equations, Formulas and CalculationsartustNo ratings yet
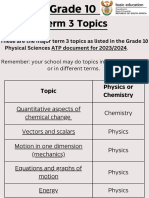
- Grade 10 Term 3 TopicsDocument10 pagesGrade 10 Term 3 TopicsOwamiirh RsaNo ratings yet
- Lesson Plan in Mathematics 10 I. Weekly Objectives: Voice RelayDocument6 pagesLesson Plan in Mathematics 10 I. Weekly Objectives: Voice RelayMark Kevin GeraldezNo ratings yet
- Manual For Instructors: TO Linear Algebra Fifth EditionDocument7 pagesManual For Instructors: TO Linear Algebra Fifth EditioncemreNo ratings yet
- MathDocument5 pagesMathvickimabelli100% (1)
- CodeVisionAVR Revision History 20051208Document20 pagesCodeVisionAVR Revision History 20051208letanbaospkt06No ratings yet
- Game Theory and Business Strategy: Individual Assignment 2Document2 pagesGame Theory and Business Strategy: Individual Assignment 2PKNo ratings yet
- AkosidogiewowoDocument20 pagesAkosidogiewowoGerald CerenoNo ratings yet
- Statistics MCQ QuestionsDocument16 pagesStatistics MCQ Questionsmanish78% (9)
- Length Power Dynamic Viscosity Heat FluxDocument19 pagesLength Power Dynamic Viscosity Heat FluxWilson UmaliNo ratings yet
- Engineering Drawing Form 4 - Figure of Equal AreaDocument13 pagesEngineering Drawing Form 4 - Figure of Equal AreaDo The CuongNo ratings yet
- Short - Notes Complex Numbers - pdf-59Document10 pagesShort - Notes Complex Numbers - pdf-59aditya devNo ratings yet
- Attenuation and DispersionDocument92 pagesAttenuation and Dispersionscribd01No ratings yet
- Practical Research 2: Quarter 1 - Module 3Document51 pagesPractical Research 2: Quarter 1 - Module 3bernadette domoloanNo ratings yet
- Mit SyllabusDocument2 pagesMit SyllabusKarnan ArjunNo ratings yet
- Array RotationDocument3 pagesArray RotationAnshulNo ratings yet
- Capital Budgeting QuestionsDocument3 pagesCapital Budgeting QuestionsTAYYABA AMJAD L1F16MBAM0221100% (1)
- Lebanese International University: CSCI 250 - Introduction To Programming - TEST-2: Student Name: Student IDDocument5 pagesLebanese International University: CSCI 250 - Introduction To Programming - TEST-2: Student Name: Student IDralf tamerNo ratings yet
- Compiler Construction NotesDocument16 pagesCompiler Construction NotesApoorva BhattNo ratings yet