You might also like
- Weak Light Performance and Spectral Response of Different Solar Cell TypesDocument4 pagesWeak Light Performance and Spectral Response of Different Solar Cell Typesimrock1234No ratings yet
- Synergie EindrapportDocument67 pagesSynergie EindrapportKostas GorgogetasNo ratings yet
- Materialstoday-June2006-p42-Flexible Solar Cells For ClothingDocument9 pagesMaterialstoday-June2006-p42-Flexible Solar Cells For ClothingKostas GorgogetasNo ratings yet
- Dynamics Equation SheetDocument2 pagesDynamics Equation SheeterpuhlNo ratings yet
- Higher Algebra - Hall & KnightDocument593 pagesHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- TG SkripsiDocument138 pagesTG SkripsiYudanto SetyoNo ratings yet
- Thrust Bearing CalculationsDocument162 pagesThrust Bearing Calculationslahiru1983100% (1)
- (17417899 - Reproduction) Understanding The Regulation of Pituitary Progesterone Receptor Expression and PhosphorylationDocument9 pages(17417899 - Reproduction) Understanding The Regulation of Pituitary Progesterone Receptor Expression and Phosphorylationتقوى اللهNo ratings yet
- 5990-3781en Analisis de BiodieselDocument8 pages5990-3781en Analisis de BiodieselAlexis A.González San MartínNo ratings yet
- CO2 Dosing and Generation SystemDocument344 pagesCO2 Dosing and Generation SystemABAID ULLAHNo ratings yet
- Typescript Cheat Sheet: by ViaDocument2 pagesTypescript Cheat Sheet: by ViapbecicNo ratings yet
- Section 1 Atoms, Molecules and StoichiometryDocument27 pagesSection 1 Atoms, Molecules and Stoichiometryapi-3734333100% (2)
- TC 1800 QI 1 1 0 (User Manual)Document25 pagesTC 1800 QI 1 1 0 (User Manual)Emman JimenezNo ratings yet
- Akvola Technologies MicroGas S Technical Specifications - Web PDFDocument2 pagesAkvola Technologies MicroGas S Technical Specifications - Web PDFHardik VavdiyaNo ratings yet
- 2023-RegisterBook Version 202212Document95 pages2023-RegisterBook Version 202212Moin AltafNo ratings yet
- Sejarah Unsur Kimia Bumi PDFDocument449 pagesSejarah Unsur Kimia Bumi PDFJon WheelerNo ratings yet
- Unit2.SP - Mill.setting and ImbibitionDocument15 pagesUnit2.SP - Mill.setting and ImbibitionHari kantNo ratings yet
- Alexander DisciplineDocument7 pagesAlexander DisciplinePatricia TagartaNo ratings yet
- Dynamic Programming Algorithm Explained in ECE 551 LectureDocument11 pagesDynamic Programming Algorithm Explained in ECE 551 Lectureadambose1990No ratings yet
- Poynting OMNI A0098 BrochureDocument2 pagesPoynting OMNI A0098 BrochurekaminareNo ratings yet
- Blockchain Technology For Cloud Storage - A Systematic Literature ReviewDocument33 pagesBlockchain Technology For Cloud Storage - A Systematic Literature ReviewNgocNo ratings yet
- GMAT Practice QuestionsDocument8 pagesGMAT Practice QuestionswithraviNo ratings yet
- Custom Objects, Fields, Tabs, Related Lists, List ViewsDocument7 pagesCustom Objects, Fields, Tabs, Related Lists, List ViewsAjay GhugeNo ratings yet
- Ug1085 Zynq Ultrascale TRMDocument1,158 pagesUg1085 Zynq Ultrascale TRMLeandros TzanakisNo ratings yet
- Software Test MetricsDocument8 pagesSoftware Test MetricscmarrivadaNo ratings yet
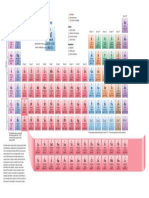
- Periodic TableDocument1 pagePeriodic TableChemist MookaNo ratings yet
- Structural Design of Penstock - Criteria: Indian StandardDocument21 pagesStructural Design of Penstock - Criteria: Indian StandardAlok KumarNo ratings yet
- Chapter 7 MCDADocument26 pagesChapter 7 MCDARosmira Natasha Binti RosleeNo ratings yet
- Aqa MM1B W QP Jun07Document8 pagesAqa MM1B W QP Jun07Annan_Faridi_517No ratings yet
- Redirection & PipingDocument16 pagesRedirection & PipingPraveen PatelNo ratings yet
- Filter 7Document480 pagesFilter 7Pranjal TripathiNo ratings yet
- Dynamic Analysis of Motor Floor: Structure DataDocument6 pagesDynamic Analysis of Motor Floor: Structure Datap_ignatiusNo ratings yet
- 3dsmax2013 PU06 Readme0Document6 pages3dsmax2013 PU06 Readme0Divad Zoñum CostaNo ratings yet
- LEMBARAN KERJA BI TAHUN 4 (m7-10) PDPRDocument9 pagesLEMBARAN KERJA BI TAHUN 4 (m7-10) PDPRnurulwaznahNo ratings yet
- Basic Chromatography Notes 1Document27 pagesBasic Chromatography Notes 1Aufa InsyirahNo ratings yet