You might also like
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsFrom EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsRating: 3 out of 5 stars3/5 (2)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsFrom EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNo ratings yet
- Radiant Energy Moray 1945Document16 pagesRadiant Energy Moray 1945Carlos MarighellaNo ratings yet
- Power Supply Theory of OperationDocument6 pagesPower Supply Theory of OperationsaeidraminaNo ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- The Art of Electronics Solutions Chapter 1Document20 pagesThe Art of Electronics Solutions Chapter 1James BanandoNo ratings yet
- DCpower SuplyDocument12 pagesDCpower Suplymm30973097No ratings yet
- Voltage To Frequency ConverterDocument7 pagesVoltage To Frequency ConverterRodfer SorianoNo ratings yet
- Standard HV Test XLPE CableDocument6 pagesStandard HV Test XLPE Cableari_pras100% (1)
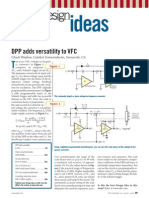
- EDN Design Ideas 2007Document146 pagesEDN Design Ideas 2007chag1956100% (2)
- EDN Design Ideas 2004Document155 pagesEDN Design Ideas 2004chag1956100% (2)
- Uc3842 Provides Low-Cost Current-Mode Control: Application NoteDocument16 pagesUc3842 Provides Low-Cost Current-Mode Control: Application NoteLeonardo Ortiz100% (1)
- CapacitorsDocument55 pagesCapacitorsedyzm3104No ratings yet
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- IPS-MBD21907-In-506 - Datasheet of Pressure Transmitter - ADocument7 pagesIPS-MBD21907-In-506 - Datasheet of Pressure Transmitter - ANikhil KarkeraNo ratings yet
- SCADADocument57 pagesSCADAkailasamvv100% (1)
- 19 Current ControlDocument5 pages19 Current ControlZeshan LatifNo ratings yet
- L6219DSDocument12 pagesL6219DSaminotepNo ratings yet
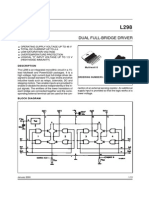
- Dual Full-Bridge Driver: DescriptionDocument13 pagesDual Full-Bridge Driver: DescriptionBaher Bassem MorkosNo ratings yet
- Infineon-Using The Current Sensing IR212x Gate Driver ICs-An-V01 00-EnDocument7 pagesInfineon-Using The Current Sensing IR212x Gate Driver ICs-An-V01 00-Enquang nguyenNo ratings yet
- Dsa 289591 PDFDocument18 pagesDsa 289591 PDFIordan Dan FfnNo ratings yet
- VNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverDocument26 pagesVNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverIan LuksNo ratings yet
- Service Manual: 17-Inch LCD Monitor AL1702Document38 pagesService Manual: 17-Inch LCD Monitor AL1702Abhilash VamanNo ratings yet
- Obsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)Document15 pagesObsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)teomondoNo ratings yet
- ZXSC410 420Document12 pagesZXSC410 420Catalin TirtanNo ratings yet
- LB1845 DDocument9 pagesLB1845 DFernando LizarragaNo ratings yet
- Application Note An-1052: Using The Ir217X Linear Current Sensing IcsDocument7 pagesApplication Note An-1052: Using The Ir217X Linear Current Sensing IcsLullaby summerNo ratings yet
- I CL 8013 Data SheetDocument9 pagesI CL 8013 Data SheetSebastian FossNo ratings yet
- Imprimir Datasheet 1Document14 pagesImprimir Datasheet 1Randy Siancas VelezNo ratings yet
- Irams 10 Up 60 ADocument17 pagesIrams 10 Up 60 AricwerNo ratings yet
- Float DriveDocument24 pagesFloat DriveEdy AchalmaNo ratings yet
- Viper22a Equivalent PDFDocument16 pagesViper22a Equivalent PDFXande Nane Silveira0% (1)
- MAX1702EDocument5 pagesMAX1702ERafael HurtadoNo ratings yet
- Two-Phase Stepper Motor Driver: DescriptionDocument19 pagesTwo-Phase Stepper Motor Driver: DescriptionDan EsentherNo ratings yet
- L4972ADocument23 pagesL4972ARICHIHOTS2No ratings yet
- Saa1042v PDFDocument7 pagesSaa1042v PDFVinny TukNo ratings yet
- DiDocument5 pagesDiByron DamaniaNo ratings yet
- An-978 HV Floating MOS Gate DriversDocument21 pagesAn-978 HV Floating MOS Gate DriversPeter RueNo ratings yet
- Chapter Three2Document12 pagesChapter Three2Fuh ValleryNo ratings yet
- Chapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerDocument48 pagesChapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerOdebunmi NathanielNo ratings yet
- MC33883Document21 pagesMC33883Nguyen TuanNo ratings yet
- Principles Applications ICL7660Document10 pagesPrinciples Applications ICL7660Juan F. RamosNo ratings yet
- Ncl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsDocument10 pagesNcl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsKhúc Hành QuânNo ratings yet
- Motor Controller Data SheetDocument13 pagesMotor Controller Data Sheetapi-284769767No ratings yet
- SVAR Power FactorDocument5 pagesSVAR Power FactorRyan HarrisNo ratings yet
- Ijecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)Document10 pagesIjecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)IAEME PublicationNo ratings yet
- Raychem Instruction ManualDocument17 pagesRaychem Instruction ManualjaikolangaraparambilNo ratings yet
- CD 00003131Document24 pagesCD 000031314131etasNo ratings yet
- MB39A132Document60 pagesMB39A132Krum BumbarovNo ratings yet
- LB 1845Document7 pagesLB 1845Nacer MezghicheNo ratings yet
- 10884Document13 pages10884karthikeidNo ratings yet
- Simple PWM Boost Controller: Power Management Features DescriptionDocument11 pagesSimple PWM Boost Controller: Power Management Features DescriptionJoe MiguelNo ratings yet
- Ug 0601Document8 pagesUg 0601kijoNo ratings yet
- Ca 3524Document20 pagesCa 3524rmsharma1970No ratings yet
- Undervoltage / Overvoltage Lockout: DC-DC Converter UV/OV Lockout CircuitDocument9 pagesUndervoltage / Overvoltage Lockout: DC-DC Converter UV/OV Lockout CircuitsathyaeeeNo ratings yet
- DC-DC Boost Converter For Custom Application by LeenaDocument4 pagesDC-DC Boost Converter For Custom Application by LeenaRekhamtrNo ratings yet
- Synchronous Rectification DC/DC Converter IC For Charging Li-Ion BatteryDocument56 pagesSynchronous Rectification DC/DC Converter IC For Charging Li-Ion BatterydigenioNo ratings yet
- An 18Document12 pagesAn 18teomondoNo ratings yet
- Sames: Three Phase Power / Energy IC With SPI InterfaceDocument12 pagesSames: Three Phase Power / Energy IC With SPI InterfaceArjun NivassNo ratings yet
- HP 2630 Optocuplu PDFDocument21 pagesHP 2630 Optocuplu PDFIon MoldoveanuNo ratings yet
- HP 2509m Flat Panel Monitor DesarmadoDocument27 pagesHP 2509m Flat Panel Monitor DesarmadoEdwin EliasNo ratings yet
- NE6188C NE6188C NE6188C NE6188CZ Z Z Z: CompressorDocument7 pagesNE6188C NE6188C NE6188C NE6188CZ Z Z Z: CompressorJesus GrilletNo ratings yet
- Z Source Inverter and Its Application.Document12 pagesZ Source Inverter and Its Application.handyenggNo ratings yet
- Gate Ee - 2001Document15 pagesGate Ee - 2001Johnfinn CaddickNo ratings yet
- 32 LB 5650Document70 pages32 LB 5650woeismaxNo ratings yet
- AozDocument16 pagesAozAndreNo ratings yet
- The RC Oscillator CircuitDocument6 pagesThe RC Oscillator CircuitNishanthi BheemanNo ratings yet
- 2SK 2645-01MR - Fuji Electric PDFDocument2 pages2SK 2645-01MR - Fuji Electric PDFStevenNo ratings yet
- SBS 1.1-Compliant Gas Gauge and Protection Enabled With Impedance Track™Document20 pagesSBS 1.1-Compliant Gas Gauge and Protection Enabled With Impedance Track™Rafael Roel Robles BaezNo ratings yet
- +2 Phy Complete Material E.MDocument320 pages+2 Phy Complete Material E.Mrahmansadik643No ratings yet
- Pertigas Care and MaintenanceDocument20 pagesPertigas Care and Maintenancejuanete29No ratings yet
- 50 Kvar 400 VPowerLogic PFC Capacitors - BLRCH500A000B40Document3 pages50 Kvar 400 VPowerLogic PFC Capacitors - BLRCH500A000B40Piter DavidNo ratings yet
- Firing Circuits of Thyristor or SCRDocument10 pagesFiring Circuits of Thyristor or SCRdivakar r vlNo ratings yet
- CL1000 Digital Clamp Meter InstructionsDocument6 pagesCL1000 Digital Clamp Meter InstructionsEdsson MendozaNo ratings yet
- Capacitance of Two-Dimensional Titanium Carbide (MXene) and MXenecarbon Nanotube Composites in Organic ElectrolytesDocument6 pagesCapacitance of Two-Dimensional Titanium Carbide (MXene) and MXenecarbon Nanotube Composites in Organic Electrolytessj hNo ratings yet
- ASCO-Avtron Catalog 608 RevA-11-3-15 PDFDocument10 pagesASCO-Avtron Catalog 608 RevA-11-3-15 PDFBedulNo ratings yet
- Bee Pec 2019Document26 pagesBee Pec 2019j deenNo ratings yet
- Minor Project ReportDocument30 pagesMinor Project ReporthimanshuNo ratings yet
- HTRYDocument7 pagesHTRYسعيد ابوسريعNo ratings yet
- Power Factor - The Basics: AnalogyDocument7 pagesPower Factor - The Basics: AnalogySudipto GhoshNo ratings yet
- AOP605 Complementary Enhancement Mode Field Effect TransistorDocument7 pagesAOP605 Complementary Enhancement Mode Field Effect TransistorfrancicciusNo ratings yet
- x3 Hybrid g2 User Manual enDocument42 pagesx3 Hybrid g2 User Manual enEngr Mohammad Asim KhanNo ratings yet
- PR1001/L - PR1005/L: 1.0A Fast Recovery RectifierDocument2 pagesPR1001/L - PR1005/L: 1.0A Fast Recovery RectifieracwindNo ratings yet
- PiddocsDocument50 pagesPiddocsscribsunilNo ratings yet