You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Blazing A Trail Insect-Inspired ResourceDocument10 pagesBlazing A Trail Insect-Inspired Resourceaskjdbq2eNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Development of A Robot For Paving Floors With Ceramic TilesDocument4 pagesThe Development of A Robot For Paving Floors With Ceramic Tilesaskjdbq2eNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- 2847 Off Road Obstacle Avoidance Through End To End LearningDocument8 pages2847 Off Road Obstacle Avoidance Through End To End Learningaskjdbq2eNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Dynamic Model With Slip For Wheeled For Omni Directional RobotsDocument9 pagesDynamic Model With Slip For Wheeled For Omni Directional Robotsaskjdbq2eNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- 6731 PDFDocument9 pages6731 PDFaskjdbq2eNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Dynamic Model With Slip For Wheeled For Omni Directional RobotsDocument9 pagesDynamic Model With Slip For Wheeled For Omni Directional Robotsaskjdbq2eNo ratings yet
- FPC Question BankDocument6 pagesFPC Question Bankaskjdbq2eNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Dynamic Model With Slip For Wheeled For Omni Directional RobotsDocument9 pagesDynamic Model With Slip For Wheeled For Omni Directional Robotsaskjdbq2eNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- SAM-GB-GL-1997-3 - 307.7155.3.0 Libretto Solaris IngDocument187 pagesSAM-GB-GL-1997-3 - 307.7155.3.0 Libretto Solaris IngPatrik KNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Como Desmontar o Painel Do AzeraDocument8 pagesComo Desmontar o Painel Do AzeraRicardo MeloNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Manitou ES5 GPF (EN)Document4 pagesManitou ES5 GPF (EN)ManitouNo ratings yet
- John Deere Service CodesDocument19 pagesJohn Deere Service CodesPablo Dalia CuevasNo ratings yet
- Audi A7 Brochure enDocument12 pagesAudi A7 Brochure enHari SeldonNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- MERLINS EcuFLASH EVO 7-8-9 TUNING GUIDEDocument165 pagesMERLINS EcuFLASH EVO 7-8-9 TUNING GUIDEDavid BNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Steering Hubs Product Listing and PricingDocument1 pageSteering Hubs Product Listing and PricingВиталий ЧерновNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- ATX960Document2 pagesATX960Ahmet Bedirhan ÖzelNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Cables Bujias Chevrolet: Stock PedirDocument15 pagesCables Bujias Chevrolet: Stock PedirEduardo AndradeNo ratings yet
- Synopsis-Lower Control ArmDocument5 pagesSynopsis-Lower Control ArmAkshay bypNo ratings yet
- Cap 13 Landing Gear System-15-16Document2 pagesCap 13 Landing Gear System-15-16Fidel Molina RojasNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- ABS Service Manual Chapter SummariesDocument38 pagesABS Service Manual Chapter SummariesJesus AlfonzoNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Tesla Motors January 2014 Investor PresentationDocument33 pagesTesla Motors January 2014 Investor PresentationotteromNo ratings yet
- Yamaha Fazer 1000 Service Manual PartsDocument74 pagesYamaha Fazer 1000 Service Manual PartsIgor MajksnerNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Baotian BT50 QT-9 Scooter Parts Diagram ManualDocument38 pagesBaotian BT50 QT-9 Scooter Parts Diagram ManualSkuter Servis Crveni KrstNo ratings yet
- Tesmec Trenchers Catalogue 2018 1075 BW enDocument2 pagesTesmec Trenchers Catalogue 2018 1075 BW enandy LiiNo ratings yet
- PMDG B737NG Checklist BritishAvgeek V3Document2 pagesPMDG B737NG Checklist BritishAvgeek V3Pili SimonNo ratings yet
- RS 182 Clio spark plug change picture guideDocument14 pagesRS 182 Clio spark plug change picture guideCraig Tomlinson100% (1)
- Permanent-Magnet Starter Motor (Automobile)Document3 pagesPermanent-Magnet Starter Motor (Automobile)prasad100% (1)
- Trelleborg T 900 ImperialDocument2 pagesTrelleborg T 900 ImperialIrineuNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- XC100Document46 pagesXC100Cristian CernaNo ratings yet
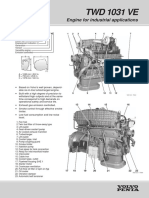
- Twd1031ve Twd1031veDocument2 pagesTwd1031ve Twd1031veHamtaro Animation75% (8)
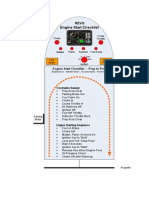
- REVO ChecklistsDocument4 pagesREVO ChecklistsAllison NolanNo ratings yet
- Auto Shipping Service, Best Car Shipping Company InfographicDocument1 pageAuto Shipping Service, Best Car Shipping Company InfographicAbc Auto ShippingNo ratings yet
- RCX Constructopedia Beta 1.0Document418 pagesRCX Constructopedia Beta 1.0shirleyangNo ratings yet
- The Ford Model-T, The Assembly Line, & The Failure of FordlandiaDocument27 pagesThe Ford Model-T, The Assembly Line, & The Failure of FordlandiaSanthoshAnvekarNo ratings yet
- 2460-4153 - Q - XL4100 EPA - Gradall - Parts - 7-16Document361 pages2460-4153 - Q - XL4100 EPA - Gradall - Parts - 7-16PhilNo ratings yet
- Chassis Components GuideDocument90 pagesChassis Components GuideLuis Fernando Vasquez RamosNo ratings yet
- Manuals Scooty Zest 110 PDFDocument68 pagesManuals Scooty Zest 110 PDFFidel CapistranoNo ratings yet
- Honda Accord WagonDocument7 pagesHonda Accord WagonMichael Fel0% (1)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)