You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Ebook Economics 12Th Edition Michael Parkin Solutions Manual Full Chapter PDFDocument34 pagesEbook Economics 12Th Edition Michael Parkin Solutions Manual Full Chapter PDFodilemelanie83au100% (12)
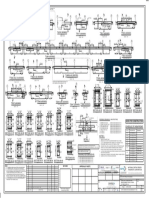
- Good For Construction: Approval by NCRTC QR CodeDocument1 pageGood For Construction: Approval by NCRTC QR CodeZaid HussainNo ratings yet
- Roti MakerDocument1 pageRoti MakerinasapNo ratings yet
- Lab 4Document7 pagesLab 4HEMANILASHINII A P R THARMALINGAMNo ratings yet
- Mini ProjetDocument4 pagesMini ProjetgangshNo ratings yet
- China Pakistan Economic Corridor Secretariat/Support Project (Cpecsp)Document1 pageChina Pakistan Economic Corridor Secretariat/Support Project (Cpecsp)Nauman IrfanNo ratings yet
- Qsen Competencies 2Document4 pagesQsen Competencies 2api-2691700450% (1)
- Assessment Intervention TeachingDocument3 pagesAssessment Intervention Teachingcha0706360No ratings yet
- Hot Cracking2Document470 pagesHot Cracking2Ashish PatelNo ratings yet
- VCP-NV 6.2 - ExampsDocument45 pagesVCP-NV 6.2 - ExampsvipertheheroNo ratings yet
- 2017-03-31 CEG To DOJ (Anti-Magnitsky FARA Violations)Document106 pages2017-03-31 CEG To DOJ (Anti-Magnitsky FARA Violations)Andrew JordanNo ratings yet
- ACN-part 1Document3 pagesACN-part 1aarohiNo ratings yet
- What Is The Difference Between A1, A2, B1 EtcDocument1 pageWhat Is The Difference Between A1, A2, B1 EtcGlory-Beast JrNo ratings yet
- Sinclair ZX Spectrum: 30 Years of Amusement and Learning: Josetxu Malanda 16th June 2012 Nonick 012, BilbaoDocument46 pagesSinclair ZX Spectrum: 30 Years of Amusement and Learning: Josetxu Malanda 16th June 2012 Nonick 012, BilbaoCirlugea DorinNo ratings yet
- Setting Up A Tissue Culture Lab:: Transfer AreaDocument6 pagesSetting Up A Tissue Culture Lab:: Transfer AreaAjay KumarNo ratings yet
- 2017 MMFX PresentationDocument38 pages2017 MMFX PresentationaljaycruzadoNo ratings yet
- An Introduction To The Indian Stock MarketDocument7 pagesAn Introduction To The Indian Stock MarketsandystaysNo ratings yet
- 04 Manual G Code Programming-1Document79 pages04 Manual G Code Programming-1Dado Maja ArseninNo ratings yet
- Signs, Signals and SymbolsDocument14 pagesSigns, Signals and SymbolsObaiah JamakalaNo ratings yet
- SimpleTech Duo-Pro-User-Guide-11012007Document21 pagesSimpleTech Duo-Pro-User-Guide-11012007cmoore2342No ratings yet
- Latin American InstrumentsDocument3 pagesLatin American InstrumentsVictoria Reenna CañeteNo ratings yet
- Saksham Samiksha Updated Logins MasterDocument39 pagesSaksham Samiksha Updated Logins MasterSarvan KhokkharNo ratings yet
- Distraksi Menonton Efektif Menurunkan Nyeri Ringan Pasien: Congestive Heart Failure (CHF)Document7 pagesDistraksi Menonton Efektif Menurunkan Nyeri Ringan Pasien: Congestive Heart Failure (CHF)Devy YahyaNo ratings yet
- VOCAB LIST Topic 1 HolidaysDocument1 pageVOCAB LIST Topic 1 HolidaysSylvia FanjulNo ratings yet
- Completed Unit II 17.7.17Document113 pagesCompleted Unit II 17.7.17Dr.A.R.KavithaNo ratings yet
- Educadores Ejovem SQLDocument8 pagesEducadores Ejovem SQLAlessandro FeitozaNo ratings yet
- How To Be A Pilot Junior WebDocument16 pagesHow To Be A Pilot Junior WebNextgen AviationNo ratings yet
- IUMCC FactsDocument5 pagesIUMCC FactsSwayam SambhabNo ratings yet
- Gr12 EnglishJIT P1 2020Document53 pagesGr12 EnglishJIT P1 2020NhlanhlakaziNo ratings yet
- Full Strategies For Teaching Learners With Special Needs 11Th Edition Polloway Test Bank PDFDocument25 pagesFull Strategies For Teaching Learners With Special Needs 11Th Edition Polloway Test Bank PDFadam.walton721100% (21)