Aaron D. Deutschman
Walter J. Michels
Charles E. Wilson
Newark College of Engineering
New Jersey Institute of Technology
Diseno
de Maquinas
Teoria y Practica
UNIVERSIOND OE RCIA
ON 0000
3971
COMPASIA EDITORIAL CONTINENTAL, S.A. DE C.V., MEXICO
DISTRIBUIDORES,
ESPANA-ARGENTINA-CHILE: VENEZUELA-COLOMBIA-PERU
Bolivia - Brasil - Costa Rica - Dominicana - Ecuador - El Salvador
Estados Unidos - Guatemala - Honduras - Nicaragua - Panama
Paraguay - Portugal - Puerto Rico - Uruguay
“Tau orignal en ingles:
MACHINE DESIGN Theory and Practice
Traducid por
JOSE ARMANDO GARZA CARDENAS M. en C.
Profesos Tala del Departamento de Ingenieria Mecca
del Insta Teenldgin de Estudio Supeniores de Monterey Monterrey, N.L
Ecicon autorizada por
MACMILLAN PUBLISHING CO., INC.
Copyright ® 1975, Macmillan Pubshing Co, Ine
brary of Congsess Cataloging in Publication Data
ISBN 002 32900055 (Teta)
Segunda impresion
febrero de 1987
Reservados todos los derechos, Ni todo el libro ni parte de él pueden ser
reproducidos, archivados o transmitidas en forma alguna o mediante al-
‘gun sistema electronico, mecénico de fotorreproducci6n, memoria 0
cualquier otro, sin permiso por escrito del editor
ISBN 968-26-0600-4
Derechos Resersados © en Lengua Espanola-/985. Primera Publcacin
COMPANIA EDITORIAL CONTINENTAL, S. A. DEC. V.
‘CALZ. DE TLALPAN NUM. 4620, MEXICO 22, D. F.
MIEMBRO DE LA CAMARA NACIONAL DE LA INDUSTRIA EDITORIAL
Registro Nim. 43
IMPRESO EN MEXICO PRINTED IN MEXICO
Contenido
Prefacio 11
Introduccion 13
El diagrama de flujo en el diseflo 14. Analisis del diseno
20. Factor de seguridad 20. Confiabilidad 23.
Costo 25. Seguridad 26. Conclusion 27. Referencias 28,
Propiedades metalargicas de los materiales
de ingenieria 29
Fractura fragil y dictil 29, Mejoramiento de la resistencia de
los materiales 30. El diagrama hierro-carbono 37. Hierro
forjado 35. Hierro vaciado 36, Tratamiento térmico de aceros
43. Diagramas de transformacion isotérmica 45,
‘Templabilidad 51. Definiciones en tratamientos térmicos
57. Términos metalirgicas suplementarios 66. Elementos de
aleacién en el acero y sus funciones 57. Clasificacién de los
aceros 70, Designaciones de la AISI-SAE para acero forjado
78. Aleaciones de aluminio forjado 80. Aleaciones de
‘aluminio vaciado 82. Cobre y aleaciones de cobre 84
‘Aleaciones de magnesio 85. Niquel y aleaciones de Niquel
86, Plasticos 87. Elasiémeros 88. Problemas 90.
Referencias 92,
Propiedades mecdnicas de los materiales
de ingenieria 93
Propiedades mecdnicas de los materiales 94, Homogeneidad %.
Elasticidad 94. Isotropia 95. Plasticidad 95. Resistencia a lx
tension 96. Esfuerzo 96, Deformacién 97. Resistencia a la
fractura 97. Limite de proporcionalidad 97. Limite elastico
97, Esfuetzo de prueba 98, Punto de cedencia 98, Médulo
|
6 Contenido
de elasticidad /0/. Ley de Hooke /0/. Resistencia a corte
directo 101. Punto de cedencia a corte 103. Ductilidad
103. Maleabilidad 104, Modulo de resiliencia /04. Médulo
de tenacidad (06. Dureza 107. Resistencia debida a carga
ciclica 1/2, Esfuerzo limite de fatiga 116. Efecto de ta
variacion del material-factor de confiabilidad 123. Influencia
del tamafio-factor debido al tamano 123. Efecto de los
métodas de fabricacién-factor por acabado de la superficie 125
Efecto de la concentracion de estuerzo /28. Una ecuacion de
trabajo para esfuerzos por fatiga 13, Efecto de algunos
factores importantes no cuantitativos 135.
Deslizamiento 149. Crras propiedades de los materiales
sensibles a la temperatura (50. Desgaste 153. Efectos de la
radiacion 155, Problemas (56. Referencias /6/
Procesos de fabricacion y disefio 163
Inteoduccién 144. Procesos primarios (64. Formado de
plastico /83. Soldadura 187. Procesos secundarios de
produccién 197. Dimensiones y dibujos en ingenieria 204.
Definiciones de términos det dimensionamiento
206. Clases de ajustes 209, Tolerancias selectivas 2/2.
Dimensiones vagas y superfluas 220. Acumulacion y no
acumulacion de tolerancias 22/. Acumulacion de la
tolerancia 222. Determinacion estadistica de las tolerancias
222. Dimensionamiento y toleranciamiento geometricos 224.
Calidad de ia superficie 225, Sugerencias para disefiar
229, Problemas 248, Referencias 251 ‘
Anélisis de esfuerzo y desplazamiento 253
EI modelo analitico 253, La relacion aproximada entre “la
teoria exacta” y la “resistencia de materiales" 254. La
naturaleza del esfuerzo y deformacion 255. Esfuerzos
flexionantes en miembros de maquinas. 260. Dellexion de
miembros de maquinas debido a flexion 268. Esfuerzo de corte
y deflexion por corte debido a cargas laterales-centro de corte
278. Torsion 283, Esfuerzo térmico 293. Métodos de
energia-teorema de Castiiano 297. Estabilidad elastica
301. Métodos numéricos 310. Problemas 314. ,
Referencias 319.
‘Teorias de falla usadas on el disefio de elementos
de maquinas 321
Esfuerzo en un punto y esfuerzo combinado 322. Teoria det
csfuerzo maximo normal 326, La teoria de corte maximo
Contenido 7
4329, Teoria de las energias de deformacién y distorsién 332.
Falla por fatiga y el criterio de Soderberg 334. Dato
acumulado 345. Problemas 346. Referencias 350.
Flechas, cufias y acoplamientos 351
Materiales para flechas 353. Momentos flexionantes ¥ par de
torsion actuando en flechas 354. Diseito de flechas sujetas a
cargas fluctuantes basadas en la teoria de falla de corte maximo
338, Diseflo de Mechas sujetas a cargas fluctuantes basadas en
Ja teoria de falla de energia de distorsion 360, Comparacion
centre las teorias de falla de corte maximo y energia de distorsion
aplicadas al diseno de flechas 367. Ecuaciones para disefio de
fechas para cargas fluctuantes y de choque 36/. Didmetro de la
fecha para el Ej. 7-1 363. Deflexién de la flecha para el Ej. 7-1
366. Diseno de flechas por computadoras 373. Velocidad
critica en flechas 374, Rigidez torsional 378. Torsion de
fechas de varias secciones transversales 380. Cufias
380. Ranuras 394, Acoplamientos 399. Juntas universales
411. Sistema de flecha exible 416. Problemas 417.
Referencias 425.
’ Chumaceras y lubricacion 427
Inteoducciéa 428, Tipos de chumaceras 429. Ley de Newton
de flujo viscoso (viscosidad) 43/, Ley de Hagan-Poiseuille
(flujo a través de tubo capilar) 433. Dispositivos para medicién
de la viscosidad 436, Efecto de la temperatura en la viscosidad
437. Ley de Petrof 440. Lubricacion hidrostatica 441.
Lubricacion hidrodinamica 443. Graficas para diseflo
447, Balance de calor en chumaceras 454. Métodos de
lubricacion 459, Materiales de las chumaceras
460. Consideraciones de disefio 462. Probiemas 463,
Referencias 465.
Cojinetes 0 baleros de rodamiento 467
Nomenclatura de los cojinetes y tipos de baleros de bolas
469. Baleros de rodillos 483. Diversas configuraciones de
baleros 492. Dimensiones estandar para baleros o cojinetes de
rodamiento 492. Tolerancias en los baleros 502, Materiales
para baleros de rodamiento 503. Friccion en baleros de
Fodamiento 505. Fundamentos de las fallas en los baleros
506, Vida, vida nominal y capacidad de carga basica 506.
Carga equivalente 508, Supervivencia de baleros con
probabilidades mayores al 90% 517. Factores de ajuste de vida
por materiales $19, Factor de ajuste de vida segtin las
8 Contenido
condiciones de aplicacién 512, Resumen de factores de ajuste
de vida 520, Baleros de rodamiento sujetos a cargas variables
520, Lubricacién de cojinetes de rodamiento 523,
Limitaciones de la velocidad de los cojinetes 0 baleros de
rodamiento $28, Sellos 532. Ensambles tipicos de baleros
535, Seleccign de baleras de rodillos cbnicos 538,
Problemas 539. Referencias 541.
Engranes rectos 543,
Terminologia del engrane recto 544, Juego entre dientes 0
hhuelgo 548. Ley fundamental de engranamiento y relacion de
velocidad 54%, Engranes con diente involuta 549, AcciOn del
diente del engrane 550. Longitud y relacién de contacto
553. Interferencia 535. Sistemas de dientes estandar
‘557. Métodos comunes de fabricacin de engranes 558. Ot
mmétodos de produecién de engranes 560. Métodos para
acabados de engranes 563. Cargas en el diente 564,
Resistencia como viga de los dientes del engrane recto
568, Concentracién de esfuerzo 577. Ecuacién de ta AGMA
578, Durabilidad de la superficie de los engranes rectos
588. Ecuacion de desgaste de la AGMA 593. Disefio del
fengrane 606, Control del hueigo entre dientes 6/1
Lubricaci6n del engrane 6/4. Materiales para los engranes
615. Engranes no metalicos 617. Diseto de la pieza a
formarse engrane 6/7. Trenes de engranes 6/8. Problemas
620, Referencias 625,
Engranes helicoidales, de gusano, conicos y otros
tipos de engranes 627
Engranes helicoidales 628. Cargas en el diente de un engrane
helicoidal 629, Terminologia de los engranes helicoidales
633, Numero formativo o virtual de dientes 438. Carga
dinamica en engranes helicoidales 638, Resistencia a la flexion
‘en engranes helicoidales 639. Durabilidad de la superficie de
engranes helicoidales 642, Engranes helicoidales cruzados
646, Engranes de gusano 650. Terminologia de los engranes
de gusano 651. Resistencia de los engranes de gusano
653, Carga dinamica 653, Ecuacién de la carga admisible al
esgaste 654. Eficiencia de los engranes de gusano 655.
Capacidad térmica del conjunto de engranes de gusano
638, Proporciones y estandares para engranes de gusano
639. Engranes conicos 663. Engranes cénicos rectos
663. Niimero formativo o equivalente de dientes 668.
Resistencia de Jos engranes cénicos de acuerdo a la ecuacion de
Lewis modificada 669. Carga dinmiea en engranes cénicos
POLITECNICA Ce SAATAS'
BIBL! Comenido 9
671. Carga admisible al desgaste en engranes cénicos
672. Método de la AGMA para disefio de engranes
cénicos 672, Cargas en el diente de engranes conicos rectos
678. Engranes conicos ZEROL 679. Engranes conicos
helicoidales 680. Engranes hipoidales 68/, Problemas
682. Referencias 686.
“Transmisiones con banda y cadena 687
> ransmisiones con banda 690. Transmisiones con cadena
698. Problemas 703. Referencias 705.
Fronos y embragues 707
7 Embragues de contacto positive 707. Embragues de disco 711
Embragues de cono 728, Otros tipos de embragues
720. Frenos 724. Consideraciones de energia y potencia 724.
Frenos de banda 726, Frenos de banda diferencial 728. Frenos
de disco 729. Freno de Bloque de zapata corta 730. Frenos de
bloque de zapata externa larga 73/. Frenos de zapata larga
interna 735. Materiales para frenos 737. Frenos eléctricos
738. Actuacién del freno 739. Consideraciones de disefto
740. Problemas 741. Referencias 747.
Resortes 749
Barras a torsion 749, Resortes helicoidales bajo cargas estaticas
y dinamicas 757, Pulsaciones en resortes helicoidales
760. Flexion y pandeo en resortes helicotdales 763. Resortes a
tension 766, Resortes de hoja 768. Resortes a torsion
771. Montajes sobre hule 774, Resortes neumaticos
776, Problemas 778, Referencias 780.
Tornillos de potencia 781
Formas de la rosca en los tornillos de potencia 782. Algunas
definiciones 789, Ecuacién del para tornillos de potencia
790. Descenso de cargas sin aplicacion de fuerza 794
Eficiencia del tornillo 794, Consideraciones de esfuerzo en
tornillos de potencia 798, Tornillos de bolas 303. Problemas
805. Referencias 808.
Sujetadores 809
Remaches cargados axialmente 809. Modos de falla en
remaches 81/. Uniones traslapadas y a tope 8/4. Remaches
cargados excentricamente 82/. Sujetadores de tornillo
827. Roseas de tornillos estandarizadas 827. Diferentes tipos
Ue tornillos, pernos y otros sujetadores 833. Analisis de
10. Contenido
18
csfuerzo en tornillos y pernos 839. Materiales para tornitlos y
pernos 847, Precarga y par tensor en pernos 849. Anilisis
‘lastico y cargado a fatiga 851. Analisis cuando se usan
empaques entre las partes que van a unirse 856. Problemas
857, Referencias 86s.
Juntas soldadas y adhesivas 865,
Soldadura por arco 867. Disefio de soldaduras cargadas,
simétricamente 868, Juntas cargadas excéntricamente 871
Juntas adhesivas 877. Problemas 882. Referencias 885,
Problemas con simetria de eje en el disenio
de mAquinas 887
El cilindro de pared gruesa 887. Ajustes por interferencia
991, Esfuerzos y desplazamientos en discos giratorios 893,
Energia almacenada an volantes $95. Disefto basado en analisis
plastico 896, Miembros inicialmente curvos 900. Problemas
901. Referencias 903,
Apéndices 905
Indice 958
Prefacio
Este libro fue escrito para estudiantes interesados en empezar el estudio del arte y la
ciencia del disero de elementos mecanicos. Los autores suponiendo que el lector ha
cubierto los cursos de ingenieria basica y de matematicas, demuestran como son
aplicados los fundamentos de ingenierta al disefio mecinico. En este curso se emplea
cl conocimiento de muchas disciplinas y el libro est4 orientado hacia los principios
practicos de ingenieria, que muestran como se pueden lograr soluciones funcionales
y econémicamente factibles a través del disefio adecuado. Se incluyen conceptos
analiticos modernos mediante los cuales puede analizarse lo esencial de las teorias
Los primeros cuatro capitulos constituyen no solamente un repaso importante
de propiedades de los materiales y véenicas de fabricacién sino, lo més importante.
comprender como el conocimiento de estas disciplinas afecta al disefio. Los autores
reconocen que muchas escuelas de ingenieria ofrecen aiin cursos formales de cienciz
de los materiales, metalurgia y procesos de manufactura. Sin embargo. tambien es
cierto que muchas instituciones preferentemente lo hacen con enfoque a la ciencia de
la ingenieria, reduciendo, por consiguiente, la importancia de los mismos o han el-
minado casi dichos cursos del plan de estudios. Por lo mismo, estos primeros
capitulos constituyen una introduccion al disefio mecanico, un repaso razonable-
mente comprensivo de tdpicos antes estudiados, los cuales se aplicardn al desarrollo
de sistemas mecnicos. Dependiendo de las bases cequeridas para este curso, esté
material puede ser estudiado a fondo, superficialmente o como repaso. Para el caso
de que no se requiera o disponga de cursos referentes a propiedades de fos materiales
y teonicas de fabricacion, el estudio de los primeros cuatro capitulos prepara al est
ddiante a leer para entender y comprender cazonablemente la informacion dada en los
iltimos eapitulos referente a elementas especificos de maquinas.
Los capitulos restantes tratan lo referente a métodos de esfueraos y analisis de a
deflexion y téenicas involucradas en el diseio y seleccion particular de partes mecd-
nieas. Ademés, se enfatiza en las habilidades del ingeniero para resolver problemas
importantes concernientes a sistemas mecanicos. Los capitulos que tratan lo referen-
tea elementos especificos de maquinas y que constituyen lo primordial del libro, son
muy independientes uno del otro. Esto le da gran campo de accion al profesor y hace
de este libro lo suficientemente exible para ser utilizado en una gran variedad de
ccursos ya existentes haciendo resimenes sin muchas modificaciones.
12 Prefacio
‘Aun cuando el libro ha sido disefado principalmente para estudiantes de inge-
nieria mecanica, lo escrupuloso de la presentacion es tal que sera una referencia muy
buena para el profesional o diseriador industrial. Muchos de los diseRos involueran
mas de un simple método para la solucion de un problema especifico, por lo que se
jntenta dar otras alternativas de solucién. Algunos métodos no cubiertos en el texto,
se resuelven por computadora al final del capitulo,
Se emplean procedimientos analiticos muy bien definidos en la solucion de
problemas de ejemplos seleccionados cuidadasamente. El libro también contiene pro-
blemas iustrativos resueltos por métados modernos, por ejemplo, emplea metodos
rhuméricos, graficos y digitales. Los métodos han sido seleccionados para aplica-
ciones en general, de modo que el lector pueda usar dichas técnicas para resolver
problemas no tratados en el libro
‘Los autores desean expresar su agradecimiento al profesor Altred K. Holowen-
ko de Purdue University, al profesor Barton L. Jenks de Penn State University y al
profesor L. J. Powers de Texas Tech, quienes leyeron, criticaron con mucha rele
ign e hicieron sugerencias muy utiles para mejorar el manuscrito original. Sus co-
entatios muy meditados (tanto en pro como en contra) dieron como resultado una
‘mejoria sustancial al libro, Apreciamos su valiosa ayuda. Deseamos tambien exter
der nuestro sincero agradecimiento al Sr. John J. Beck, editor técnico de Macmillan,
por su gran tarea para la organizacion del material iustrativo y mecanografiado que
dio como resultado la impresion det libro. Estamos muy agradecidos por su paciente
y bondadosa actitud de trabajo para con nosotros. Los autores invitan a estudiantes,
profesores e ingenieros de la industria, a que es escriban en caso de que tengan algu-
‘ha pregunta que formularles, Seran muy apreciados todos sus comentarios y suge-
A.D.D.
WIM.
CEW.
Introduccion
simBoLos
IN, = Factor de seguridad basado
en esfuerzo de cuptura
Factor de seguridad basado
en esfuerzo de cedencia
EL objeto de la ingenieria es proporcionarle a la sociedad lo que la civilizacién moder.
ra requiere. Por tanto, la ingenieria se transforma en el eslabon que une y converte
los regalos naturales necesarios para el hombre. Es de todos conocidos la evolucién
tenida desde que el primer hombre en la Tierra produjo fuego con et frotamiento de
piedras o con la primer punta de flecha construida. La ingenieria no se limita sola
‘mente a la observacion de realidades naturales. Esto en primer lugar le corresponde
al cientifico. En ver de esto, le corresponde entender los principios cientificos y apl
carlos para llegar a una meta designada. En este sentido, la ingenieria debe ser consi
derada como una ciencia aplicada,
‘Como ciencia aplicada, la ingenieria usa el conocimiento cientifico para lograr
un objetivo especifico. El mecanismo mediante el cual una necesidad es convertide
en un plan funcional y significativo es llamado disefio. En otras palabras, disefo e:
Ja formulaciéa de un plan, esquema o método para trasladar una necesidad a un dis-
positivo que funcionando satisfactoriamente cubra la necesidad original. Por ejem-
plo, la construccion de supercarreteras deben seguir los planes de disetio de los inge-
nieros. También los fabricantes de maquinaria de extrusion de plastico deben seguit
los planes de disefio de los ingenieros. De hecho, practicamente todas las funciones
tenicas dependen del disefto para el funcionamiento satisfactorio.
Los planes de estudio en las escuelas de ingenieria tienden a dar énfasis muy
marcado a cursos de ciencias de la ingenieria y matematicas, y asi el estudiante los
estudia desde el principio hasta el final de cada curso. En realidad estos cursos solo
son herramientas para el proceso del disefto. El estudiante debe comprender que as
‘como “todos los caminos conducen a Roma”, todas las disciplinas ingenieriles con-
ducen al disefo. Aun aquellos estudiantes que dedican su tiempo estudiando algunos
aspectos de la ingenieria que no es disefio, deben entender que en alguna forma estan
involucrados en el diseno. Es por canto ventajoso para los ne6fitos familiarizarse
con la ingenieria del disefto para tener éxito en su profesion como ingenieros.
El resto del capitulo se concentrara en el proceso del diseo y en aquellos aspec:
tos que contribuyan al diseno satisfactorio.
14 Disero de méquinas—teora y prctica
SECCION 14
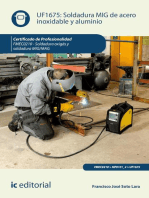
El diagrama de flujo en el disenio
La Fig. I-I es una forma tipica de diagrama de ‘lujo para diseflo. Pueden obtener
se otf0s tipos en el material publicado en [I 2, 3]! los cuales resultan ser muy nu-
merosos para mostrarios aqui. Sin embargo, independientemence de la referencia
“analizada casi todos los diagramas de flujo contienen alguno o todos los aspectos
‘mostrados en la Fig. 1-1, dependiendo del producto a disenarse y del procedimiento
particular de la compatia.
Para entender completamente todo lo que debe considerarse en el proceso del
disefio, procederemos explicando las caracteristicas de cada uno de los apartados de
Ia Fig. Ft
Reconocimiento de una necesidad
Este aspecto del disello puede tener su origen en un aimero cualquiera de causas
Los reportes de los clientes sobre el funcionamiento y la calidad del producto pueden
obligar a un redisefio. Esta causa esté indicada por la retroalimencacién indicada en
Ia Fig, I-1 que sale del apartado del producto relevado. En los negocios, la compe-
tencia industrial esté constantemente forzando la necesidad de diseftar equipo
‘nuevo, procesos y maquinaria. Por ejemplo, la maquinaria de linotipia provista de
‘airices que funde los caracteres pot lineas completas, formando cada una un solo
bloque esta siendo reemplazada por impresores de tipo fotografieo de alta velocidad
controlado por computadora. Otro ejemplo es el caso de maquinas herramienta de
talleres mecanicos equipadas con controles quméricos a traves de cintas y en las
Cuales deben Fabricarse cantidades grandes de piezas complicadas a dimensiones
txactas, Otza fuente de necesidades lo constituye el desarrollo de patentes de un de-
terminado producto o de su incorporacion a un disefo ya establecido,
Entre los grandes generadores de necesidades estan las diferentes agencias del
gobierno. Son necesidades corrientes tipicas el mejorar los servicios para manejo
Gel correo, lo cual tltimamente ha conducido a la automatizacion de las oficinas
postales desarrollando una variedad de dispositivos y sistemas de proteccién para la
Seguridad nacional, de toda clase de equipo contra la contaminacién para control y
mejoramiento ambiental. Esta sltima area constituye en si misma una cantidad
trande de necesidades secundarias y terciarias para los alos que siguen.
El lector podra pensar en muchas otras necesidades que hagan resurgir proble-
‘mas de disefo en ingenieria. independientemente de la causa, un aspecto importante
fe reconacer gue existe la necesidad de usar la experiencia y sentido comin, todo en-
focado a la necesidad para justificar su recompensa y obtener toda la informacion
posible que concierne a dicha nevesidad.
Especificaciones y requisites
Habiéndose definido la necesidad, sus requisitos deberdn estudiarse con mucho
cuidado. En el diagrama de flujo se indica a este paso como especificaciones y re~
Introduccion 15
Fig. 1-1 Disefo del diagrama de fu
‘0 con retornas de etroaiimentacién.
quisitos. Muchas organizaciones ingenicriles designan a esta area como disefto y requi-
sitos para su realizacién, Con frecuencia la parte inicial de un proyecto result
terrumpida en este punto debido a que las especificaciones estan dadas en términos
‘muy generales, indicando con esto que el cliente (por ejemplo, departamento de ven-
tas, consumidor, ete), dene s6lo una idea vaga de lo que reaimente desea.
Por otra parte, varias agencias locales, estatales y federales (en particular milita-
res y la Comision de Energia Atomica) y una variedad de clientes muy sofisticados
téenicamente (por ejemplo. compadias que sostienen su propio personal de
16. Disato de méquinas— tora ypréctica
ingenieia)presentanespeciiacionsesritas con macho detalle donde tanto cl dss:
ingejo os requsits de realizacion son cuidadosamente eiaborados. De hecho,
0 eerando aplican requisitos eferentes ala salud, seguridad o algin cédigo legal,
sag requisites forman parte de la especificacion original. Ademas, los extandares
Ghoernameatales, comerciales eindustriales (por ejemplo, Unified Standar Thread,
eitonal Electrical Manufacturers Association Standards para alambrado, motores,
ee American Iron and Steel Institute Material Standard y muchas otras) forman in-
ceviablemente parte de una especificacion. Con bastante frecuencia, las especifica-
Mones son elaboradas para satisfacer Ia produccion, competencia y capacidad de la
‘compania motriz
Estudio de posibilidades
Después de que las especificaciones han sido preparadas, aceptadas y sometidas a
Consideraciones, el siguiente paso en el flujo del disefto es hacer um estudio de posibi-
fidades, La tinalidad de este estudio es verificar el posible éxito o falla de una pro-
puesta tanto desde el punto de vista tecnico como evondmico. Se debe dar respuesta
eivarias preguntas. (1) gSe va en contra de alguna fey natural? (2) ;Algunas especifi-
aciones van mas alla de fo que técnicamente se dispone en el presente? (3) :Hay al
una dependencia con respecto a materiales dificiles de obtener? (8) :El costo del
producto final sera tan alto como para eliminar completamente al producto en un
futuro?
No debe matinterpretarse al estudio de posibilidades pensando que su finalidad
es acabar con et producto. Sin embargo, es cierto que el “‘entusiasmo"” que ponga el
Gepartamento de ventas o miembros de [a administracin podran superar serias difi-
Galades técnicas, tales que eviten muchas horas-hombre de tiempo de disefo.
Pueden también emplearse muchas horas de tiempo por parte de los ingenieros que
constantemente estan buscando perfeccion en el disefio, esto a expensas del costo del
proveto. Esto no quiere decir que cualquier cosa que alarguc el proyecto esté por
Pompleto dentro dela disribucion de ciempo y costo. Esto simplemente indica que
se debe hacer 430 del juicio y de la experiencia para determinar que se han obtenido
Jos objetivos del diseno a través de la buena préctica de ingenieria y que este esfuer2o
sera realizado en forma econdmica.
Es aparente que las personas responsables de hacer el estudio de posibilidades
sean ingenieros muy experimentados en el disefio, con conocimientos de la ciencia de
la ingenieria y con un gran conocimiento del uso de los materiales, métodos de pro-
duccién y necesidades del departamento de ventas. De hecho, las personas respon-
ables del estudio de posibilidades seran los mismos ingenieros que en dlkima instan-
‘ia serin los responsables del disefto del proyecto final
Con bastante frecuencia, como resultado del estudio de posibilidades, se hacen
cambios en las especificaciones y requisites, con el fin de que el proyecto tenga una
snayor probabilidad de éxito. Esta accion est indicada en la Fig. 1-1 teniéndose asi
lina retroalimentacion al regresarse del apartado del estudio de posibilidades al de
espeeificaciones y requisites,
Introduccién 17
Después de haber analizado las facilidades del disefto, continia el diagrama de Flujo
del diseno hacia el siguiente paso indicado en la Fig. 1-1, al que se le llama sintesis de
diseo creativo. Esta fase constituye un reto siendo una parte muy interesante del di-
seflo. A menos de que se tengan restricciones, el diseflador podra actuat como inge-
hiero, inventor y artista, codo a la vez, a esto se le llama crear,
La creatividad puede definirse como la sintesis de varias ideas nuevas y/o anti-
aguas y de conceptos de tal manera que con ello se produzca una idea completamente
nueva (al menos para su creador), Hasta ahora, psicdlogos y educadores no han idea
do un método para la ensefanza dela creatividad, aunque a través de algunos méto-
dos se ha tratado de estimularla, La creatividad es un aspecto del comportamiento
humano que sigue siendo investigado por Ins psicdlogas, teniéndose aiin grandes ca-
rencias en su comprensin, Sin embargo, estamos de acuerdo en que todos tenemos
la habilidad de creacion en diferentes niveles. La creatividad involucra meditacion y
cierto ¢s que todos en mayor o menor grado tenemos capacidad para meditar. En es-
te aspeeto, una preparacidn de educacién adecuada puede mejorar el proceso creat
vo, sin embargo, debe recordarse que independientemente det tipo psicologico tien-
den a disminuir la capacidad de pensamiento logico y estuerzo creativo [veanse las
Referencias de 4 10 inclusive)
Disefio preliminary desarrollo
Después de que se ha completado el proceso de sintesis de disefo creativo, habra uno
© varios disenos que satisfagan al conjunto dado de especificaciones y requisitos. Es
necesario decidir cual de las ‘‘soluciones"” se usara para el disefo preliminary de-
sarrollo, esto constituye el siguiente paso en el diagrama de flujo del diseho. Las ba-
ses para formular decisiones son muchas y muy variadas. El conjunto de técnicas
para “fijar las bases" concempla procedimientos complicados que involueran tablas
de matrices, teoria de probabilidad, etc. Un andlisis completo de las véenicas para
hhacer decisiones puede obtenerse en las Referencias (9] hasta la (15).
‘Al haber escogido una solucién entramos al dominio llamado disefo preliminar
y desarrollo. En este paso, se hacen dibujos mostrando maquina o sistemas separa-
dos para determinar la configuracin total y para establecer relaciones funcionales
entre las diferentes partes de la maquina 0 sistema. Estos dibujos deben tener todas
las dimensiones y notaciones importantes asi como también vistas seccionales auxi-
liares que expliquen completamente el disefo propuesto. Ademas, se hacen estudios
cinematics que incluyen dibujos completos de la maquina y los diagramas del ciclo.
de la maquina. Obsérvese que este paso concierne principalmente en detallar los re-
sultados de la sintesis del diseno creativo mediante dibujos con objeto de validar los
requisitos de tamaio y funcionalidad de las especificaciones.
Durante esta fase raramente se logran todas las especificaciones y requisitos,
por tanto, regresando a la Fig. I-1, se observa la retroalimentacion que sale del apar~
{ado diseto preliminar y desarrollo hasta el apartado de especificaciones y requisi-
tos, indicando con esto la necesidad de reducir algunas especificaciones (si esto es
posible) a fin de efectuar el disento completo.
18 Diseto de méquinas—teorl y préctica
‘Ademés, mientras se elaboran los bosquejos para el disefio pretiminar, se puede
trabajar en probar la idea, determtinar algunas propiedades de los materiales, para
Jat al dispostivo, 0 bien, para determinar alin pardmetro desconocido, basa
o-en ciertas t2enicas de informacion o en la experiencia. Por lo mismo, cieras areas
Gel diseno preliminar podran dejarse pendientes en su desarrollo de acuerdo a los da-
tos tenidos, De hecho, el desarrollo del trabajo toma lugar durante el siguiente paso
en el diagrama de flujo.
Diseo detallado
El diseno detallado se refiere al aparejo actual y dimensionamiento de todos los
Componentes individuales, tanto de los fabricados como de los comprados, que
Sonsvituyen el producto total, dispositivo o sistema. Se elaboran por separado dibu-
jos detallados de cada uno de los componentes, mostrando todas las listas necesarias
$ todas las dimensiones y tolerancias, el material y el tratamiento térmico (silo re-
{quiere la cantidad de cada uno de los componentes por ensamble, ef nombre de tos
cOmponentes y quizt el nmero del dibujo del ensamble donde va a usarse Ia parte
componente, Muchas compafias y agencias del gobierno siguen un conjunto de nor-
thas y procedimientos de dibujo que incluyen mas datos que ios antes mencionados
Sin embargo, e criterio principal es que la informaci6n dada en los dibujos debe ser
tal que ene aller se sepa especificamente cémo va a fabricarse la pieza. Es aparente
Gus las dimensiones no pueden ser de ninguna manera redundantes, porque entonces
qroperador al hacer la pieza tendria que escoger dimensiones y la decision que haga
podra estar equivocada, Tambien sino se tienen las dimensiones o la informacion
Pecesatia hard imposible la fabricacion de la pieza. En el Cap. 4, Secs. 4-6 a 414
Inclusive, se expone un breve estudio referente a dimensionamiento
‘Gensralmente un dibujante o un estudiante de ingenieria hace los dibujos bajo
ta supervision del ingeniero de disefto, quien a su vez debe proporcionarle esquemas,
dates y 1a informacion necesaria. A fin de obtener esta informacion, el ingeniero de
ddiseno, trabajando con sus esquemas preliminares, debera dimensionar las partes,
escoger los materiales, especificar las Componentes comerciales, et., basado en las
feenicas analiticas adecuadas y en su experiencia. Esto indica que debera utilizar sus
SSrocimientos de! matematicas, mecinica, resistencia de materiales, mecanica de
Sluigos cinematica, vibraciones, metalurgia y procesos de taller, A la vez podra te
rer la asistencia de expertos en areas especializadas. Como antes se indic6, la mayor
parte de ese libro se dedica a aplicar las téeicas para seleccionar los elementos de
maquinas que comprenden un disefo.
Construccién del prototipo y pruebas
Después de haber completado todos los detalles, debera enviar al taller tos dibujos
de subensambles y ensambles, incluyendo los materiales y lista de tas partes del dise-
Tpsarese que cl ingeniero de diseno a dnicamente se ivolura en proesas novedosos;cmbién nese
cero tear es roda su educacon genie Aparentemente puede considerase que fingeieria
Serer sel tosces del aaj ingen. La persona gue rabae en esta area es de experarse que ete
bien prepara tanto on matematias como eh encase ingens
Introduccion 19
‘ho completo para la fabricacién del modelo o prototipo. De acuerdo a la Fig. 1-1 el
disefio completo esté listo para construirse y probar el prototipo.
En esta etapa, se fabrican las partes, se compran los componentes comerciales ¥
la maquina o sistema despues del ensamble esta lista para su evaluacién y prueba. Al
final del periodo de prueba se podriin o no conocer los datos que requieran cambios
‘9 modificaciones en el diseRio preliminar 0 de un area especifica del diseo. Esta po-
Sibilidad esta indicada en la retroalimentacion mostrada en la Fig. 1-1. Después de
haber efectuado los cambios y/o modificaciones necesarios, se incorporan los
huevos componentes en el ensamble del prototipo para continuar con las pruebas y
evaluaciones. Este procedimiento de hacer continuas revisiones y mejoras al diseno
se repite hasta que el ingeniero del disefio quede satisfecho y de que se cumpla con
las especificaciones estipuladas. En este punto, se envian todos los dibujos, partes y
listas de materiales al departamento de ingenteria de la produccion donde los dibujos
son modificados de modo que el teayecto completo pueda ser disefiado para su pro-
duccion,
Diseiio para produccién
[Ahora se analizarén los cambios sugeridos en el disefio, con el fin de tener los mejo-
res (a veces el mas econémico) métodos de produeci6n. Utilizando nomenclatura
moderna a esto se le llama analisis de valores [véase las Referencias I y 12] yen con-
sideracion que esta adquiriendo cada vez més importancia en el disefto. Por ejem.
plo, el ingeniero encargado de la produccién podra considerar que una parte a fa-
bricar podra lograrse mediante estampado, vaciado o quiza forjado. Si se van a
fabricar cantidades grandes, cualesquier de estos procesos resultara mas economico
‘que el maquinado de cada pieza en lo particular. Desde luego que al hacer una
descripeion deberan considerarse los costos de toda la herramienta necesaria la cual
puede amortizarse de acuerdo a la cantidad de partes a producir.
‘Otro ejemplo que el ingeniero de la produccién debe considerar, es la posibili-
dad de combinar varias partes fabricadas en una sola o la de reemplazar algunas par~
tes con equivalentes comerciales disponibles. También el ingeniero de la produccién
podra considerar el reemplazo de algun de los materiales con equivalentes satisfac-
torios por otro de menor precio. Cuando se han terminado de hacer los dibujos para
la produccin debern enviarse al departamento de produccién para considerar los
productos desechables.
Producto desechable
Por lo general se hacen prototipos para produccién, los cuales son probados y cual-
uier mal funcionamiento que no pueda corregirse facilmente es regresado al depar-
tamento de diseno y desarrollo preliminar o al de diseno detallado para su modifica
cidn. Este proceso se indica con la vuelta de retroalimentacion en la Fig. 1-1
La descripcin anterior, no esta descrita en todos sus detalles, asi como también
no es [a dnica trayectoria a seguir en el disefio de un producto, dispositive o sistema.
Sin embargo, para apreciar en forma total la descripcién mencionada del proceso de
diseno, sera necesario involucrarse diariamente con el procedimiento utilizado.
20. Disefo de mBquinas—teora y préctce
SECCION 12
Anilisis del disefio
Una vez que se ha seleccionado un diseto, se hacen disefios detallados preliminares y
subsecuentes como se muestra en a Fig. 1-1. En esta etapa es necesario hacer dibu-
jos de planos mostrando los detalles, resultados de la prueba, hacer los cdlculos
nevesarios, ec., o que en tltima instancia dara como resultado el disefto del prototi-
po. En esta parte, el disefiador deberd especificar dimensiones, seleccionar compo-
rentes y materiales y en general considerar algunos aspectos tales como método de
fabricacion, costo, confiabilidad [véanse las Refs. 13 y 14], utlidad y seguridad. Et
disetador debe confiar en su habilidad analitica y entrenamiento en la ciencia de la
ingenieria para lograr sus abjetivos.
En este punto del estudio es muy necesario entender que el modelo escogido y
ccalculos subsecuentes son realmente hechos en forma aproximada. Por tanto, debe
completamente conocerse las diferentes suposiciones y limitaciones (por ejemplo, li-
realidad, homogeneidad, etc.), que se hicieron en la obtencion de las ecuaciones
uusadas en el estudio de la ciencia de la ingenieria. El disehador, en su afan de aplicar
las ecuaciones adecuadas a su modelo matematico, podra hacerle grandes simplifica-
clones que realmente no representen el caso real
Por tanto, ¢s muy importante tener en mente que un buen diseno esta basado en
tuna buena teoria, como al mismo tiempo enfatizasido que los niumeros resultantes al
aplicar la teoria son meramente ““parque de bala’, le proporcionaré al ingeniero de
disefo bases racionales muy importantes para su trabajo. Infortunadamente n0 0-
ddos los sopicos en el diseio tienen bases analiticas firmes para el trabajo que hacen,
En tales casos, dependen de enfogues semirracionales o empiricos para la seleccion
de un problema o seleccidn de un elemento de disefto
SEccion 13
Factor de seguridad
fa luz de lo expuesto en la seccién anterior referente a modelos analiticos, resulta
‘azonable suplir las incertidumbres asociadas con cualquier disefio basado en tales
modelos. Ademis, el disetador deberd considerar en cualquier tiempo las siguientes
incertidumbres adicionales:
1. Variaciones en las propiedades en los materiales. Debido a que dos coladas en
un horno no son exactamente iguales, y que algunos materiales pueden tener
inclusiones, etc, las propiedades de resistencia de los materiales dadas en las
tablas son por lo general valores promedio. Si el valor es el dado por el fabri-
cante lo mas probable es que se cefieran al valor minimo.
2. Efecto del tamafio con respecto a las propiedades de resistencia del material.
Las tablas de propiedades, a menos que se indique otra cosa, listan los valores
de la resistencia basados en prucbas de especimenes de + pig. Por lo general,
Componentes mayores fallan a esfuerzo menor que componentes menores
hhechos de! mismo material
POLITECNICA CE CARTAGENA
BIBLIOTECA Introduccion 21
3. Tipo de carga. Una carga estitica simple es facil de reconocer, pero .qué
puede decirse con respecto a cargas por impacto y a cargas sabitamente aplica-
das? {Como se debe tomar en cuenta la carga de fatiga por ocasion aplicada y
combinada con algunas cargas de choque (por ejemplo levas, eslabones 0 iste
‘mas de alimentacién)?
4. Efecto del maquinado o procesos de formacién. Estas operaciones en la pr
duccign pueden, y generalmente ocurre, dar lugar a intraducir concentracién,
de esfuerzo y a esfuerzos residuales.
5. Efecto del tratamiento térmico com respecto a las propiedades fisicas del mate-
rial. Un tratamiento térmico inadecuado puede producir esfuerzos residuales y
agrietamientos. Ademas el esfuerzo de cedencia real puede ser muy diferente
de la usada en los célculos efectuados para el disefio.
6. Etecto del desgaste con respecto a las funciones y vida de un miembro de una
maquina. El constante rozamiento sin la lubricacién adecuada puede reducir
apreciablemente la vida de trabajo, por lo que debe tomarsele en cuenta.
7. Efecto del tiempo y ambiente en que se espera vaya a trabajar el dispositivo.
Deben tomarse muchas precauciones cuando los componences van a trabajar
fen regiones radiactivas o atmOsferas corrosivas. Deben tomarse las debidas
precauciones para el caso de esperarse que un material esté sujeto a desliza-
miento (0 sea, miembro cargado a temperatura elevada mediante un periodo
largo de tiempo). También debe considerarse la condiciOn a temperaturas me-
ores que la normal.
8. Requisitos especificos para vida y confiabilidad. Por ejemplo, una ametralla-
dora debe ser contiable, pero por lo general tiene vida infinita. Sin embargo,
ciertas maquinas podran cener vida casi infinica sin ser completamente con-
ables, pero que puede esperarse el que periddicamente puedan repararse.
9. Todo lo referente a seguridad humana. Todos los disenos deben considerar la
seguridad del operario y de las demas personas cercanas o en contacto con
la maquina o dispositivo. Sobrecargas subitas inesperadas pueden causar rotu-
ras o dao considerables.
Con el fin de tomar en cuenta en el disefio la lista de incertidumbres fos ingenieros
‘emplean lo que se llama factor de seguridad. (Algunos ingenieros piensan que d
biera llamarse “factor de ignorancia”".)
Estamos seguros que en el pasado el lector ha empleado o calculado un factor de
seguridad. Por ejemplo, dividiendo el esfuerzo en el punto cedente entre el esfuerzo
calculado da como resultado un factor de seguridad. Esto parece ser un procedi-
miento muy simple y correcto a seguir; infortunadamente las cosas no siempre son
tan simples. El disefador deberd estar por completo seguro del significado cuando
cefectiia sus célculos con tal factor o cuando &l fundamenta su disefio en tal factor. El
uso inadecuado de un “factor de seguridad” puede resultar en ciertos casos, en des-
zgaste innecesario del material 0 en otros casos en una falla operacional. Por tanto,
debe definir el significado del uso del factor de seguridad.
Para materiales dictiles se supone que los esfuerzos iltimo a tensién y compre-
sin tienen el mismo valor, 0 sea
22 Disefo de méquinas tear y préctica
esfuerzo Gitimo Ls
N.ldiseho) = Siaeraa de trabajo 0 de dis a
N,(aiseno) = x Stuette decedent a2
Siuerzo de trabajo 0 de disefio
Con frecuencia, se usa la Ee, 1-2 porque el equipo mecdnico es frecuentemente
considerade como no funcional si algunas componentes importantes tienen ceden-
cia. Un ejemplo tipico podra ser la cedencia permanente local que puede sar causada
por el seguidor de una leva sobre [a superficie de Ia leva.
Siun elemento de maquina o componente mecanico ha sido dimensionado (0
sea, que sus dimensiones son conocidas), entonces el factor de seguridad esta defini-
do como
3)
esfuerzo de cedencia aa
N (real) = “fuerza calculado
ara tipos de problemas no lineales, tales como columnas 0 rodillos sujetos
{alla por pandeo no deben usarse esfuerzos mayores al de cedencia y al tltimo, En su
ugar se utiliza la carga real de falla como base para determinar el factor de seguri
dad. Por tanto, se tiene
carga de fal
arga calculada
ae
Nireal) =
Para componentes mecanicos que estan sujetos a cargas continuamente varian
‘0, €l factor de seguridad se basa en el limite de ruptura para carga ciclica del mate-
rial uilizado. Sin embargo, debido a que se tienen cargas cilicas y estavicas, la defi
icin depende del andlisis de fatiga de Soderberg, lo cual se estudia en el Cap. 6,
Seo. 65.
Joseph P. Vidosic [15] sigue los siguientes razonables factores de seguridad. Es-
tos factores estan basadas en la resistencia a la cedencia.
1. N= 1.25 — 1.5 para matetiales excepcionalmente confiables usados bajo
‘condiciones controladas y sujetos a carga y esfuerzos que pueda determinarse
con exactitud. Una consideracion muy importante es que casi siempre se usan
para pesos pequeiios.
2. N = 1.5 —2 para materiales bien conocidos, para condiciones de medio am-
biente razonablemente constantes sujetos a carga y esfuerzos que puedan cal-
cularse con facilidad,
aN '5 para materiales promedio que trabajen en condiciones de medio
ambiente ordinarias y sujetos a carga y esfuerzos que puedan calcularse
4. N= 2.5 — 3 para materiales poco experimentados o para materiales fragiles
‘en condiciones promedio de medio ambiente, carga y esfuerzo.
5. N = 3—4 para materiales no experimentados usados para condiciones pro-
medio de medio ambiente, carga y esfuerz0
6. N= 3 —4 debera también usarse con materiales mejor conocidos que vayan
‘a usarse en condiciones amblentales inciertas u sujetos a esfuerzos inciertos.
Introdueci6n 23,
7. Cargas repetidas: son aceptables los factores indicados en los puntos I al 6 pe-
+0 debe aplicarse el limite de ruptura por carga ciclica o esfuerzo de fatiga en
lugar del esfuerzo de cedencia dei material.
8. Fuerza de impacto: son aceptables los factores dados en los puntos 3 al 6, pero
debera incluirse un factor por impacto.
9. Materiales fragile: si se considera ala resistencia iltima como la mitxima teo-
rica, los factores indicados en los puntos 1 al 6 deberan multiplicarse por 2.
10. Para el caso deseable de tener factores elevados, deberd efectuarse un andlisis
muy completo del problema antes de decidir sobre su uso.
En algunos casos, la seleccion del factor de seguridad esta estipulado por un c6.
digo 0 por requisitos va fijados. Por ejemplo, la ASME? Linfired and Fired Pressure
Vessel Code, la ASME Pressure Vessel Code para recipientes nucleares, varios codi-
0S de construccién y valores especificos que estan estipulados en contratos tanto
para civiles como gubernamencales.
Resulta aparente que la seleccion del factor de seguridad apropiada es empirica
y depende mucho de las personas y experiencia industrial acumulada. Cuando un
producto 0 dispositivo ciene mucho tiempo de usirsele, los factores referentes a st
comportamiento son confiables. De hecho se puede depender de tales datos aunque
se hayan tenido modificaciones en el diseio y en los materiales.
También se han empleado métodos estadisticos (16, 17] para obtener el factor
de seguridad. Esto toma en cuenta la variacién tanto en dimensiones como en la re:
sistencia de la componente mecanica. Con este enfoque resulta un factor de seguri-
dad que, por lo general, es menor que el basado en un juicio puro. Sin embargo, en
este método se requiere también hacer una estimacién de las variaciones de la carga y
resistencia. Sin embargo, el enfoque estadistico es tan s6lo de interés pasajero para
los disehadores modernos, sobre todo en aquellas areas en las que para ciertos com-
Ponentes se tienen muchos datos experimentales acumulados. Ademas, este metodo
permite el uso de factor relativamente bajo, si se acepta tener un porcentaje de falla
Pequefto. Infortunadamente las limitaciones de espacio no permiten tener un estudio
mas detallado, pero el lector puede leer en las referencias dadas.
SECCION 14
Confiabilidad
Los productos de consumo, maquinaria industrial y equipo militar son intensamente
evaluados en confiabilidad de operacion y vida esperada. Aun cuando los usuarios
particular, industrial y “militar” (por ejemplo, plantas de fuerza; tanto como para
combustible fésil, como nuclear) siempre siguen ciertos programas de confiabilidad,
los productos de consumo reciben la mayor atencién y publicidad. Una de las bases
mas importantes para la confiabilidad del praducto es su disenio y es Logico que el di-
sefiador debera conocer algunas pautas 2 seguir
ak Disefio de maquinas~teoria y préctice
En el articulo titulado “A Manual of Reliability" [13] se da la siguiente defini-
ion de confiabilidad: “confiabilidad es la posibilidad de que un dispositivo ejecute
Sin fallas una funcion especifica bajo ciertas condiciones dadas por un periodo de
tiempo conocido”. De esta definicién, nas damos cuenta que un analisis completo y
cabal de confiabilidad, involucra estudios de estadistica y de teor
Je probabilidad.
Debido a las limitaciones de espacio, no es posible entrar en un estudio detallado de
esta materia, Sin
‘Como guia para ayudar al ingeniero de disefo en la produccién de un producto
bargo, recomendamos las Refs. (13) y [14].
contiable, Tangerman (13) sugiere las siguientes recomendaciones:
A
Requisito det producto
1. gEstan especificados todo lo referente a funcionalidad, confiabilidad y
Dtros requisitos?
2, ;Cudles son los requisitas ambientales? {Son razonabies, basados en la ex-
periencia? {Estan basados en mediciones o en conjecuras?
43. {Cuales son los requisitos de contiabilidad? ;Son muy estrictos 0 no lo son?
2Son consistentes?
Diseno preliminar
1. Qué experimentacion en el disefio puede satisfacer los requisitos de fun-
cionalidad?
2. {Qué componentes estindar y ensamblados pueden ser usados?
3, [Como afecta un cambio ambiental a los factores 1 y 2?
4. ;Cudinta extrapolacion ambiental es necesaria?
5. Hay disponibilidad de dictamen de expertos?
‘Analisis del disenio
1, iCual es el comportamiento de cada componente y material respecto al me
dio ambiente?
2. {Qué tan confiable son los datos de vida disponibles?
3, {Puede calcularse la contiabilidad con los datos disponibles? ;Faltan da-
tos? Si faltan datos, gpueden éstos suplirse?
{Pueden completarse unidades para hacer pruebas?
{ Cues son los eslabones mas débiles en el disefio?
{Es la confiabilidad suficientemente alta o lo indicado es un rediseno?
Accibn correctiva
1. iHay ayuda de asistencia técnica de expertos?
2. {Puede darse un dictamen de fabricacion o control de calidad?
5, Esa la confiabilidad basada en uno o dos componentes? Si asi es, 18¢
pueden redisefiar, desbaratarse o hay redundancia en la respuesta?
4, ;Puede cambiarse la condicién ambiental al haber cambios por calenta-
thiento-enfriamiento, montaje para condiciones de choque, proteccién?
5, Un redisento es lo indicado?
(Los pasos C y D pueden repetirse varias veces.)
Diseno final
1. ¢Pueden produccidn, inspeccién o compras ayudar a escribir las especifica-
2. gPueden escribitse las especificaciones para asegurar el 100% en prucbas €
inspeccién?
Introduccion 25
3, 2Si las caracteristicas de los componentes no pueden ser 100% probadas,
Son estos adecuados para fabricarse de acuerdo a los procedimientos de
control y calidad?
44. iQué componentes pueden ser subcontratados o comprados? ;Se tiene lista
aprobada de vendedores?
‘Pueden tenerse procedimientos para inspe
partes defectuosas antes de su fabricacion?
6. ,Cual es el nlimero minimo de pruebas e inspecciones que deben hacerse en
cada etapa? ;Deben probarse todas las caracteristicas?
7. gCon la prueba de “hacer caer sacudiendo’” se puede mas ficilmente elimi-
har unidades subestindar?
8, ;Cuantas pruebas con seguridad podran efectuarse sin,
mente la vida del producto?
F. Rediseando después de correr pruebas piloto,
Deben hacerse regresando al Paso C.
ny prueba para rechazar
fectar apreciable-
SECCION 1-5
Costo
‘Sin lugar a dudas, el costo es un factor extremadamente importante en casi todos (si
no én todos) los disefos. La realizacion de un disefto econémico depende de la expe-
riencia del disetador, del conocimiento, ingenuidad y habilidad para “‘cambala-
chear” el parametro de un disefo por otros parametros del diseno.
De hecho, el deseo de lograr el “‘valor cabal de! dinero que se paga por algo"” se
ha desarrollado en una nueva metodologia llamada analisis de valores atribuida ori-
ginalmente a L, D. Miles, y las diversas técnicas empleadas son explicadas en su
libro Techniques of Value Analysis and Engineering [11], Brevemente, analisis de
valores es el procedimiento organizado de reduccién del costo que cubren las fases
del disefio, produccién, materiales y distribucion manteniendo la confiabilidad del
producto, Aun cuando no podemos entrar con detalles en los aspectos del analisis de
‘valores, un ejemplo ilustrativo servira para transmitirnos sus objetivos y mostrarnos
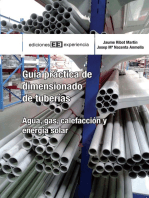
Ja aplicacion de sus téenicas, La ménsula de la Fig. 1-2 muestra los resultados antes ¥
Fig. 12 Antes y después del anaisis de valores (RN. Mooney: Savings through use of va
lue analysis techniques in engineering. ASME Paper No. 63-DE-14, 198. |
25 Disefio de méquinas—tworte y préctica
esputs del andlisis de valores y fue tomado de artcul escrito por R- N- Mooney
U2).
__ aman cn ie ae
Eltipo de objetividad involucrado en el andlisis de valores debe estar presente en
la “mente del buen diseftador”, Eso significa que es posible lograr un disefto satis-
factorio y funcional con un minimo de materiales caros y que sea consistente con la
vida y desgaste de las partes y del medio ambiente en que se le use. Ademés, otras
consideraciones de costos deben ser evaluadas para cada diseito tales como el méto-
do de fabricacion, tolerancia, uso de componentes estindar comercialmente dispo-
nibles, método de ensamble, trabajo herramental, cantidad a producir y finalmente
simpiicidad de mantenimiento. Por Ultimo, debe hacerse un intento por conservar &
uun minimo el némero de componentes que consticuyen un ensamble
seccion 18
Seguridad
‘Como en el caso de confiablidad, el equipo y la maquinaria deben estar disehados
de tal manera que sean seguros tanto para el operador como para la comunidad que
lo rodea.
ara recipientes a presion expuestos 0 no expuestos al fuego el cédigo de la ASME
proporciona el minimo estandar de seguridad requerido. En el campo de potencia
huclear y areas relacionadas, las demandas de la AEC* especifican los requerimien-
tos de seguridad, tanto para disefo como para operacion. En mineria el Bureau of
Mines tiene requisitos de seguridad muy rigidos, a veces estos requisitos no se
cumplen por carecer de una inspeccion adecuada. Recientemente, la industria auto-
mocora ha estado siendo requerida para disefio de automdviles seguros, aunque las
rormas del gobierno permanecen en estado de flujo. Tampoco deberd olvidarse que
{os servicios militares requieren que se sigan determinadas especifiaaciones en el su-
ministro de su equipo, La American National Standards Institute en New York, la
National Safety Council en Chicago, la Bureau of Mines, ia Bureau of Labor Statis-
"Atom Enerey Commision
BIBLIOTECA
Introduccién 27
tics y la National Bureau of Standards, todas localizadas en Washington, D. C., son
Dbuenas fuentes de informacion sobre seguridad y estadistica
Sin embargo, el enorme complejo industrial estadounidense tiene desde hace
tiempo el punto de vista del hombre comin referente al problema general del equipo
y seguridad en maquinaria, en lo que respecta al operario y al empleado de la planta.
El diseRador puede jugar un papel exiremadamente importante en proporcionar se-
guridad adecuada al trabajador proporcionandole los medios necesarios para su
seguridad en las posibles etapas del diseft.
Una lista breve de puntos que el diseRador debe considerar para darle seguridad
al operario de equipos, es la siguiente.
1. Se deben proporcionar cubiertas 0 protecciones a fos componentes en movi-
‘miento préximos al operario.
2. Las partes que puedan causar dafo al operario (por ejemplo, indumentaria
ue pudiera engancharse en algo) no deberan ser lanzadas por el equipo.
3. El disetio debe ser tal que para cualquier tipo de ajuste, lubricacion o manteni-
miento general pueda realizarse con poea dificultad o peligro.
4. El equipo 0 maquinaria deberd estar sin trabajar hasta en tanto, manos, pies,
brazos 0 alguna otra parte de su cuerpo del operario esté en la zona de trabajo
(por ejemplo, el area de trabajo de una prensa).
5. Deben evitarse esquinas y orillas puntiagudas.
6. El equipo eléctrico debe estar adecuadamente protegido y aterrizado,
7. Debera proporcionarse (si se requiere) ventilacion natural o forzada en caso de
que la atmosfera este contaminada con humos, olores u otras particulas.
8. Deberdn tomarse precauciones para evitar exponerse a varias formas de a
diacion (0 sea, rayos X, ultravioleta, materiales radiactivos, etc.)
Esta lista indica solamente una pequeita parte de los riesgos que un disefiador
debe evitar para proporcionar seguridad adecuada, Para cada disenio especifico el
ingeniero debera instruirse asi mismo con respecto a las peculiaridades singuiares de
su problema refiriéndose a los codigos y/o estandares apropiadas.
SECCION 17
Conclusion
En este capitulo hemos dado una descripcién breve de la metodologia en el disefio y
varios aspectos importantes. A través de la practica y ia experiencia, poniendo em-
pefio se logra tener profesionalismo y madurez. Algo de lo cual puede lograrse en un
curso de proyectos de diseflo de méquinas. Desgraciadamente por limitaciones de es-
pacio no es posible ahondar mas en algunos aspectos del diseno. Sélo esperamos que
con esta introduccion y las referencias citadas sean de ayuda al estudiante para pen-
sar con mejor ldgica en los procedimientos del diseno.
EE resto del libro se concentrara en la fase del disefio de maquinas, que propor-
cione al estudiante conocimiento suficiente para seleccionar adecuadamente varios
elementos de maquinas, asi como también para habilitarlo para realizar el andlisis del
28. Disato de maquinas—teori y préctica
diseno, Sin embargo, por la experiencia tenida en la ensefianza del disefio de mé-
Guinas, nos indica que para muchos de ls estudiances es muy dul un repaso de mate-
Fjales de ingenieria, métodos de fabricacion y resistencia de materiales. Por tanto,
algunas partes de los Caps. 2, 3,4 5 se presentan con este punto de vista en mente.
REFERENCIAS
1) M. Asimow: fntruduevion o Design, Prentice-Hall, Ine, Englewood Clifs. NJ
1962
Joseph P.Vidosi’ Elements of Design Engineering. The Ronald Press Co. New
York. 1969
51 Edel Se ted: hvrouetion o Cevatice Design. Prentice-Hall ne. Englewood
Ci. N'T.I96"
4) NL. Munn: Psschiology. Houghton Miffin Co.. Boston, 1946
5) M §, Allen: Morphological Crestcty. Preaie-Hal, Ine. Englewood Clif. NJ
1962,
4) Eusene Rawdsepp: Forcing ideas with syneties. Mach. Des. pp 134-139 1Oetober
16, 1969).
John &, Arnold: Useful
Stuntord University. 1959
8} A. F.Osborn: Applied fmagiution. Chas, Serioner’s Sons. New York, 1963.
9} Lao Spector (e4.); Denovale, Mach. Des. pp 20-28 Apri 5. 1969)
Dt. Marples: The Decision of Enginering Design. Te Institution of Er
signers. London, England, July 1960
115 Le ©. Miles: Technigues of Vatue Analssis and
Co, New York, 196
1) RN, Mooney: Savings through use
#546 Paper Number 98-DE-45, 1968
E.G. Tangerman (ed.): A manual of reliability. Prod, Eng. pp 63-96 (May 16,
1360,
1) Robert Lusser: A study of methods for achieving reliability of guided missiles
Technical Report No. 75, US. Naval Ait Misile Test Cente. July 10, 1980.
Joseph P. Vidosic: Machine Design Projets. The Ronald Press, New York, 198
ay C. Johnson Optimum Design of Mechanical Ements. John Wiley and Sons,
Inc. New York, 1961
17) Hsuan-Loh Sw: Design by quanttacive factor of satety. Trans. ASME. J. Eng. Ind
p37 (Nov. 1960)
ive techniques. Creare Engineering: Seminar
wineering. MeGraw-Hill Book
iques ia ensineering
ESCUELA UNI
POLITECNICA UE CARTAGEN:
BIBLIOTECA
Loewe
Propiedades Metalurgicas
de Materiales de Ingenieria
sIMBOLoS
= resistencia dltima, tb/ ple ASTM = American Society for Testing
Sy = esfuerzo limite de faiga Materials
tn especimenes pulidos, Ib/plg? BH = Nimero de dureza Brinell
‘American Iron and Steel SAE = Society of Automotive
Tnsticure Engineers
[ASM = American Society for Metals
Als
En este capitulo se hard una revision de los materiales ferrosos y no ferrosos, de los
fundamentos del tratamiento térmico y de los plasticos desde el punto de vista del di-
setador, al lector le ser& muy ameno tratar con las diversas propiedades de los mate-
riales que por su resistencia son importantes en el clculo de las dimensiones de los
‘elementos de las maquinas.
El diseRador joven con frecuencia prefiere darle un enfoque mas analitico al di-
sefio subestimando la seleccion del material, tanto desde el punto de vista funcional
como econémico. Por lo mismo, un repaso det material presencado en este capitulo
servira para enfatizar como puede lograrse un disefto viable y econdmico.
SECCION 21
Fractura fragil y dictil
La fractura de los metales ocurre de una de estas dos formas: (1) fractura fragil y (2)
fractura diictil. La fractura frail ocurre cuando virtualmente no se tiene flujo plas-
tico o reduccién de frea, la separacion toma lugar a lo largo de pianos clave y apare-
ce como una superficie granular brillante. En la fractura fragil se muestra que los.
planos de la fractura son perpendiculares (0 casi) 2 la linea de accién de la fuerza de
tensiOn. Ademas, el esfuerza normal sobre el plano de a fractura sera mayor que en
cualquier otro plano. También de acuerdo al tipo del material, las cargas dinémicas
y temperaturas bajas pueden también ser la causa de la fractura frégil,
En la fractura dict hay flujo plastico tomando lugar la separacion en la direc:
cign del esfuerzo cortante de valor mas alto. En ia prueba a tension de tales metales
20 Diseio de méquinas—teoda y practice
se produce un combado y fracturas en forma de cono, y la apariencia en el punto de
fa fractura es suave y lisa. A las fracturas de este tipo se les lama fracturas transcris-
talinas porque dan lugar a deslizamientos dei grano,
SECCION 22
Mejoramiento de la resistencia de los materiales
asicamente hay cinco maneras de incrementar la resistencia de los metales: (1)
aumentando el tamafo de la fibras metalicas, (2) disminuyendo el tamafo del grano,
{G) endurecimiento por deformacién, (4) aleacion y (5) tratamiento térmico,
1, Con un aumento de tamato del espécimen, se tiene una mayor tendencia a cener
cristales con detectos. Por lo mismo, habra una uayor posibilidad de falla a rezisten
tia menor. En poco tiempo més se har mucha investigacion con respecto a fibras
rmetalicas producidas en ei laboratorio. Estas fibras metilieas son una especie de
filamentos de cristal en forma de aguja de unos pocos milimetros de largo y de 1a
0 m de diamerro, al ser de menor tamafo, estarin libres de efectos y su resistencia
sera aproximadamente igual alos valores calculados en teoria. Por ejemplo, la resisten-
cia a tension del hierro producido de manera comerciales alrededor de 100 000 Ib/pig?
(100 kIb/9lg}). Sin embargo, con fibras de hierro producidas en i laboratorio se han
tenido valores de 200 000 Ib/pie? (200 klb/pig}). Los resultados obtenidos en el labo-
ratorio referente a muchos metales han sido Sorprendentes. Sin embargo, se requiere
de mucho estudio e investigacion para que este método sea comercialmente factible.
2, La resistencia de un metal se mejora al disminuir ef tamatio del grano propor~
cionando ademas una trayectoria mas complicada de las lineas transversales de la
microestructura, El método més importante para control del tamatio del grano es
‘mediante el control de la velocidad a la cual el metal es enfriado. Un enfriamiento
rapido produce grano fino, En cambio se produce grano grueso con enftiamiento len-
to. Existen varias formas para el control deta velocidad del enfriamiento, Por ejem-
plo, el vaciado de un metal en un molde de arena (pieza fundida en arena) permite
Que el aire frio produzca granos relativamente grandes. Por otra parte el vaciado de
tun metal en un molde metilico producira un grano fino al enfriarse. Puede propor-
cionatse enfriamiento rapido haciendo circular agua o aceite de enfriamiento a cra-
vés del molde (fundicion a troquel). Este procedimiento produce estructura granular
muy fina.
3. El endurecimiento por deformacién (llamado también trabajo en frio) por me-
dios mecdnicos, produce grano pequeno, Una operacién tipica de esto, lo constituye
el proceso de rolado en frio de barras de acero al carbon hasta un diametro de valor
‘especificado en un tren de laminar. El material es forzado a deformarse de acuerdo
con el sistema de destizamiento antes explicado. Sin embargo, su resistencia al desti-
zamiento aumenta a medida que continia et proceso de detormacion. Con esto se
obtiene un grano de menor tamafo, un aumento en la dureza y resistencia a la ce-
ddencia pero, una pérdida de tenacidad y ductilidad. La pérdida de ductilidad y tena-
cidad debidas al endurecimiento por deformacion, pueden recuperarse por in proce-
so llamado de recocido el cual seré tratado en la See. 2-9.
Es posible en un trabajo en caliente reducir el tamao del grano de un metal y
ademés evitar las perdidas de ductilidad y tenacidad atribuidas al trabajo en (vio. En
Propiedades metalirgicas de materioles de ingenieria 31
‘este proceso, el metal es perfilado y formado cuando se encuentra arriba de cierta
temperatura conocida como temperatura de recristalizacion. Un ejemplo tipico de
abajo en caliente es el forjado de partes de acero (por ejemplo, ejes, flechas,
cuchilleria, piezas en forma de herradura, etc.). Con un control adecuado de las car~
gas y de la temperatura del forjado puede obtenerse wn metal que sea resistente y tenaz.
4. El agregado intencional de cantidades pequenas de un metal o metales al metal
base, es lo que se llama aleaclén. Estos agregados se hacen no solo con el fin de
aumentar la resistencia del metal base mediante un tratamiento térmico, sino tam.
bien para mejorar la resistencia a la corrosion, propiedades eléctricas, ductilidad,
maquinabilidad, tenacidad, etc. Cuando a un metal aleado no se le ha dado trata-
rmiento térmico, simplemente 8é le llama aleacién.
Existen tres formas de composiciones de aleacion. Estas son mezclas metalicas,
soluciones sdlidas y compuestas intermetalicos. (a) Cuando dos metales no son so
lubles en sus estados sélidos, forman una mezcla mecinica. Este tipo de aleaci6n se
ccaracteriza porque cada uno de los metales componentes retienen su propias pro-
piedades y estructura cristalina. (b) Cuando dos metales son solubles en sus estados
Solidos forman una aleacion llamada solucidn sélida. En la formacién de una solu-
cién sélida los atomos de la aleacion pueden reemplazar al azar a los atomos de la
estructura del metal base. A esto se le llama solucion sustitucional. Es también po-
sible que la localizacién de los atomos de la aleacion queden dispuestos al azar
dentro de la estructura del metal base. A este tipo de solucion se le llama solueién in-
tersticial. (c) Cuando os atomos de la aleacion reemplazan en cantidades propor-
cionales a los étomos del metal base y estan localizados en forma regular en vez del
azar, a dicha aleacion se le lama compuesto intermetilico. Aleaciones de este tipo
seneralmente son de alta resistencia a la tension, son menos ductiles que sus consti-
tuyentes y tienden a ser mas resistentes a la deformacion que sus constituyentes.
5, La forma mas importante de aumentar la resistencia de un metal es por twata-
miento térmico. Tratamiento térmico se define como un calentamiento controlado y
subsecuente enfriamiento de un metal o una aleaciOn. Se le usa para obtener pro-
piedades deseables en una aplicacién particular. El tema de tratamiento térmico es
tan importante que se le dedicardn las Secs. 2-6 a 2-10 inclusive para su estudio de-
tallado.
seccion 23
El diagrama hierro-carbono
El diagrama de equilibrio hierro-carbono es la representacin més importante de un
sistema de aleacién que podra encontrar un diselador. Proporciona un cuadro
completo de las relaciones fase, y temperatura para el conocimiento nevesario del
tratamiento térmico del acero. Ademés, claramente se indica en el mismo la division
entre acero y hierro vaciado, dependiendo del contenido de carbono. En la Fig. 2-1
se muestra un diagrama de hierro-carbono completo con la nomenclatura exacta
aceptada y con letreros en varios puntos, al diagrama debiera llamarsele mas correc
tamente diagrama hierro-hierro carburo porque el carbon en equilibrio no aparece
‘como carbon libre sino en la forma de carburo de hierro (Fe\C) conocido como ce-
mentite. Sia embargo, es comén llamarla diagrama hierro-carbono.
42 Diseio de miquinas~teori y préctca
Fig. 2-1 & dagrama de equilbrio hierro-carbono
Haciendo una rigurosa inspeccion a la Fig. 2-1 se observa que et hierro puro (0
2a, 0M de carbon) tiene diferentes formas alotropicas. A la temperatura ambiente,
cl hierro tiene cuerpo de estructura citbica centrada que tiene propiedades magnéti-
cas. A esta forma se le llama hierro alfa (a). A medida que la temperatura se aumen-
‘a hasta 1414 °F, la estructura cristalina permanece sin cambiar, pero el hierto pier-
de sus propiedades magnéticas.? Si se aumenta la temperatura hasta 1670 °F el
hiierro cambia a una estructura cibica de fase centrada, que permanece siendo no
‘magnética. Esta forma es estable hasta la temperatura de 2552 °F, punto.en el cual
toma lugar o:ro cambio. El hierro nuevamente toma la forma de estructura cilbica
"Es ia propiedad que tienen ciettos elementos quimicos de exit en dos 0 ms formas diferentes,
® algunos metalrgisas aman a esta forma de hiro, hero bea) pero nototros cntinsaremas re
slendonos 31a region (ex eve, OPC em ln Fg. 2-1) coma Mero ala
Propiedades metalirgicas de materiales de ingenienla 33
centrada y es llamado hierro delta (4). Finalmente cuando la temperatura se auimen-
ta hasta 2802 °F, el hierro delta se funde y se vuelve liquido,
EI hierro puro es importante porque cada forma tiene capacidad diferente para
mantener al carbon en soluciones sOlidas. Estas capacidades distintas para retener al
carbon son las bases para el tratamiento térmico del acero. Industrialmente, el
hierro delta tiene poca importancia y por tanto, no se le considerara en lo que sigue.
‘Como el lector podra observar en la Fig. 2-1, el carbon es soluble en el hierro al-
fa hasta un maximo de 0.025% a 1333 °F (punto P) y solo 0.008% a la temperatura
ambiente. El resultado es una solucién s6lida intersticial con carbon disuelto. El
hierro alfa es cominmente llamado ferrta, Este es el mas suave de todos los mate-
riales del diagrama.
"A la temperatura de 2066 °F, el carbon es soluble en’! hierro gama (¥) en un
maximo de aproximadamente 2.0% (punto £ de la Fig. 2-1). El uomibre comanmen-
te dado a esta solucién sélida intersticial es austenita.
Bajo condiciones de equilibrio, el carbon esta en la forma de carburo de hierro
(Fe,©) llamado cementita. Este material contiene 6.67% de carbon y determina el
limite del diagrama de equilibrio en la parte derecha. Es fragil, débil a tension, resis-
tente a compresidn, y es el mas duro de cualesquier de los materiales en el diagrama
de equilibrio.
El punto C, en la Fig. 2-1 es un punto eutéctico* contiene 4.3% de carbon y con-
siste de una mezcla de austenita y cementita conocida como ledeburita, Este material
tno es observable porque le austenita es inestable a la temperatura ambiente (excepto
para ciertas condiciones especiales) y continiia cambiando con enfriamiento.
De significado especial es el punto S, en el cual el hierro tiene 0.8% de carbon a
1333 °F. A este punto se le llama eutectoide® y es el punto mas bajo en el diagrama
cen el cual la austenita desaparece cuando ¢s enfriada lentamente. El material forma
do en este eutectoide se le Hama perlita. La perlita es una mezela mecanica de ferrita
y cementita. Vista en un microscopio la mezcia se ve como capas laminares de ce-
mentita dentro de tn campo de ferrita blanca. El nombre de perlita tiene sit origen.
por el hecho de que la microestructura se asemeja a una perla,
I diagrama hierro-carbono se divide en dos secciones principales (véase la Fig. 2-1).
‘Aleaciones que tienen menos de 2% de carbon (en alguna de las literaturas se especi-
fica 1.7%) son llamados aceros; las aleaciones que contienen mas de 2% de carbon
son llamadas hierro vaciado, Ademas, la clasificacion de los aceros est también di-
Vidida en dos secciones. Aceros que tienen menos de 0.8% de carbon (en cierta lite
ratura se especifica 0.834) llamados aceros hipoeutectoides; aquellos que tienen més
TB raided, a solcion af dbiea lamarel lf Feria para disinguila del dela fornia es dei,
(ert deka 42522 °F) Sin embargo, ade errno stan importante en la metaurgi, aa alfa fer
{simplemente ele ama ferris
ex puna euetico 6s un punto sobre et diagrams de equiva en el cual dos metlesconstiuyentes se
soldiian simutaneamente 4a misma temperatura. También ese punt ene calla aleasion tiene la
temperatura més taja de congas (9. fuse) de cualquier otra combinasio aleada (punto S en
la Fig. 2-0
Uncutetolde cs dfinido en Vol | de Meteis Handbook come “una reacciin iotérmicareveribie en
tual una solucin sida es convertia por enfriamiento en dos 0 mis slidos mezcladosinimamente
iinimera de sldos a formarse es igual al nimero de components del sistema.
(a)
BS
Ne:
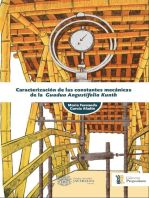
Fig. 22 Cambio en la microestructura del acero con el cambio en ol contenido de carbén. (al
Prdcticarsentehierolibe Ge carbén x 100. (b) Acero con 0.25% de carbon. Ferita blanca}
Y perita Inegral x 100. {c) Acero con 0.48% de carbon. Ferita (bianca) y perita (negra),
100, {d) Acero con 0.85% de carbén. Todo es patita, x 100. (e] Acero con 1.10% de car.
on. Perita (oscuro) y cementita (bianca), x 100. (fh Peta muy sumentada, mostrando
Sects lamina, Fra (lance) y cements nea, «2500; (Cones de U.S. Stes
Propiededes metalirgicas de materiales de ingenieria 35
d¢0.8% son llamados aceros hipereutectoides. En la Fig. 2-2 se muestra el efecto de
tas diferentes cantidades de carbon en la microestructura de aceros enfriados lenta-
mene.
SECCION 24
Hierro forjado
El hierro forjado es una mezcla de hierro puro y de 1-38 de escoria. También con-
tiene trazas de carbon manganeso, silice, fostoro y azufte. El hierro forjado se ob
tiene vaciando la escoria fundida del horno Siemens-Martir en recipientes que con-
tienen hierro. La mezela final después de quitarle el exceso de escoria es vaciada en
Tingotes para pasar luego al tren laminador. Los lingotes pueden ser recalentados pa-
ra formar barras, tubos, placas, perfiles estructurales, piezas forjadas, clavos, re-
iaches, alambre de pias, accesorios, etc. El hierro forjado es dictil y suave, es £&-
cilmente forjable y soldable. Ademas de ser dictl, resiste ala corrosion por la capa
de oxido que rapidamente se forma cuando esta expuesto en un medio ambiente
corrosivo. En la Fig. 2-3 se muestra una microfotografia de la secci6n transversal y
longitudinal de una muestra de hierro forjado
Debido a ia laminacién que recibe, el hierro forjado tiene mas resist
iteccibn longitudinal (0 sea, la direccion de la laminacidn) que en fa direccidn trans
versal. La resistencia del hierro forjado puede aumentarse mediante una aleacién.
‘Como aleacidn tipica se le puede agregar de 1.5 a 3.5M de niquel, La resistencia diti-
‘ma del hierso forjado puede aumencarse mediante trabajo en frio” y envejecimiento
Subsecuente. 4 continuacion se listan las propiedades dei hierro forjado sin aleacion.
y-con 34% de niquel -
Los esfuerzos de Fatiga en flexin y direccidn axial son 19 000-23 000 Ib/ pla? ¥
11 000-16 000 Ib/ ple, respectivamente. Las pruebas de impacto indican un valor de
Charpy de 5 pies/Ib para secciones transversales “‘granulares” y de 18 pies-tb para
secciones longitudinales “granulares”. Para temperaturas inferiores a cero, el hierro
Forjado al niquel muestra gran resistencia en mantener su resistencia al impacto. A
ia temperatura de 700 °F el hierro forjado disminuye su resistencia a la tension y @
900 °F su resistencia disminuye a la mitad de la que ie corresponde a la temperatura
ambiente
c CUELA UN
Tne Cap. in seis varias propiedad metic, | UNIVERSITARIZ
‘ease a Sec, 2 OLITECNICA SE CARTAGENA
Bistioreca |
36 Disero de méquinas—teoria y préctica
Fig. 23. Microestructura del hierro ford. Escoria en una matiz feria. (a) Seccién trans:
versal. [b} Seccion longitudinal. Grabado en Nital 2%. [Cortesla de Buehler Ld. ]
SECCION 25,
Hierro vaciado
Tal como se indica en la Fig. 2-1, cuando el contenido de carbon del sistema hierro-
carbono esté entre los limites de 2 a 6.67% la aleacién resultante es hierro fundido
La mayoria de los tipos comerciales de hierro vaciado o fundido contienen entre 2.5
y 4% de carbén. Resulta obvio que, con tal contenido de carbon el material resultan-
te sera muy fragil y que tendra ductlidad baja. En consecuencia, el hierro vaciado
ro puede ser trabajado en frio. Debido a que el hierro vaciado en estado liquido flu-
ye Facilmente, éste podra ser vaciado en moldes de forma maquinada y podran ma-
uinarse después de enfriarse y transcurrido un cierto tiempo. Aunque el hierro va-
ciado es relativamente débil a la tension, tiene mucha resistencia a la compresién
Ademas las propiedades de hierro vaciado pueden variar considerablemente agre
gandole metales de aleaciOn y con tratamiento térmico adecuado,
Se tienen cuatro tipos principales de hierro vaciado: (1) fundicion blanca, (2)
fundion maleable, (3) fundicin gris y (4) fundicién nodular. Pueden ademas consi-
derarse dos tipos mas, los cuales son hierro vaciado acerado y hierro vaciado aleado.
Ep launas referencias se considera hiro vasado cuando a onteno de carbon es de 1.7% 0 més
Propiedades metalirgicas de materiales de ingenierla 37
Fundici6n blanca
La fundicion blanca consiste de perlita (0 sea, austenita transformada) en una
matriz de cementita blanca (véase la Fig. 2-4a). Para esta microestructura practica-
mente todo su contenido de carbon esta en forma de cementita. La fundicion blanca
¢ dificil sino imposible de maquinarla por ser extremadamente dura y frigil, A este
erro vaciado se le lama fundicion “blanca” debido a su apariencia blanca de la
ractura
El uso de la fundicion blanca est muy limitado, aunque se emplea en aplica-
ciones tales como molinos de bolas, dados de extrusion y en algunas lineas para
mezcladoras de cemento. Las maquinas de estos tipos necesitan tener las propieda-
des de resistencia al desgaste que la fundicion blanca posee.
Fundicién maleable
El principal uso que tiene la fundicin blanca es en la produccion de fundicién malea-
ble, Si la fundicion blanca se mantiene a 1600 °F por un periodo largo de tiempo
¥y después es enfriada rapidamente,"° la cementita tendré pérdidas de carbono
r Fe + C). Cuando esta sustancia es enfriada a temperatura ambiente, la
microestructura resultante consiste de nddulos de carbon libre en un mar de ferrita
Gig. 2-46).
‘La fundieién blanca tiene propiedades mecdnicas que son superiores a la fundi-
cin gris (que se trataré en seguida) excepto para con el desgaste. El material es facil
mente maquinable y se le usa muy bien con secciones relativamente delgadas (por
ejemplo, +a 2 pla). Este material tiene gran aplicacion en la fabricacion de equipos
para las industrias automovilistica, petrolera, agricultura y ferrocarriles. Especifica
‘mente, la fundieion blanca se usa para cubiertas de engranes, pedales de frenos er
automoviles, colgaderas de resorte, partes de tractores,
‘Si se agrega manganeso, la fundicion maleable puede retener mas carbon combi
nado y cuando es enfriado lentamente hasta la temperatura normal se formara hierro
de perlita maieable. Ei hierzo de perlita maleable puede también obtenerse por calen
tamiento de una fundicién maleable ferritica por encima de su temperatura critica
inferior, seguido después por un enfriamiento rapido por la inmersion en un medio
(por ejemplo, aire, aceite). La microestructura resultante se muestra en la Fig. 2-4b,
El revenido de la fundicin maleable perlita después de que ha sido templado este.
roidiza' a la perita.
‘También es posible agregar metales de aleacién a la fundicion maleable para
modificar sus propiedades mecénicas. Las aleaciones frecuentemente usadas som
cobre o cobre y molibdeno al mismo tiempo. El agregado cobre mejora la resistencia
ala corrosion, la resistencia a la tension, la resistencia a la cedencia y reduce la ducti-
lidad. La combinacién de cobre y molibdeno mejora la resistencia a la corrosion ya
10 Er procedimintodecalentar y mantener un metal eta temperatura por un geriodo de empo ¥ de
pues dork eutamianta velocidad contol, es lamado revende. Cuando et proceso se aplica a
funcicion blanca por fazoes obvias 3 le lama maleabilzaion.
Exferidiaacin os clentamiento y enfriamieno para producir una forma globular de carburo en
38 Disefo de miquinas—teoria y préctica
Fundicion gris 150 x
US, Steel Corporation.
Fig. 2-4 (a). Funcicin blanca 100 x
{bl Fundicion maleabie 100 x. (cl.
[Conesia de
Propiededes metalirgicas de matersles de ingenieria 39
ta tension. En la siguiente tabla se hace una comparacién de las propiedades mectni-
cas de Ia fundicion maleable ferrita, perlita y cobre-molibdeno,
SS
ee
Dos tipos de fundicion maleable muy usadas son la ASTM A47-52 grado 32.510
y la Ad7-32 grado 35 O18, En la Tabla A-t del Apéndice A ve dau las propiedades
Imecdnicas de estos dos materiales.
Fundici6n gris
De todos los hierros vaciados la fundicion gris es la mas ampliamente usada. De
hecho, es muy comin referisse a fundicion gris cuando se habla de hiierro vacia
do. Esta contiene de 2-S a 4% de carbon y cominmente poco mas de 2% de silicio.
Después de la solidificacién, la cementita se vueive inestable descomponiéndose ex
‘ustenita y grafito llamado carbon grafitico. El silcio acta como gratitizador. E
grafito aparece como laminillas de forma irregular, lo cual da a la fundici6n gris su
apariencia de color gris cuando ocurre fractura,
‘A la temperatura ambiente la estructura de (a aleacién resultante queda bastante
afectada por la cantidad de grafito en la matriz. Por una parte, ia cementita preeu-
tectoide” y la cementita eutéctica separada dan como resultado una matriz perlita y
sgrafito. Por otra parce, una cantidad grande de silicio causara que la cementita se se
pare dela perlia, reduciéndose con ello la resistencia del material resultante. La re
Sistencia de la fundicion gris est& deverminada por la variacion de la composicion de
fa perlita en la matrz, desde diferentes mezclas de perlta y ferrita hasta tener tebr\-
camente ferrita pura. Lo mas resistente y duro corresponde a la fundicion aris
perlitica. Lo més debil y suave corresponde a uta mezcla grafito-ferita de Fundicion
pris que tenga el contenido minimo de carbon. La resistencia y la dureza se aumer-
fan al aumentar el contenido de carbon. En la Fig. 2-4c se muestra una microfote-
srafia de una fundicion gris.
En la especificacion A48-46 de la ASTM clasifica siete diferentes clases de fundi-
cidn gris: nlmeros 20, 25, 30, 35, 40, 50 y 60. Cada ntimero de clase indica ta resisten-
Sia minima a tension. Por ejemplo, la fundicion gris clase 20 tiene una resistencia mk
hima a la cension de 20 000 Ib/pig la clase 25 de 25 000 1b/is* etc. En la Table Al
del Apéndice A, se da una lista completa de las propiedades mecanicas de la fundi
ion aris,
pa comentta form antes que la frmacién del euecode, por lo que ee hama cementita proce
ride, ava a cementite formada en lari comprendida etre a ines Aa sy. Wessel Fig, 21
40 Disafo de méquinas—teorl y prbctce
‘Ala fundicion gris se le usa con frecuencia como soporte de cimentacion de ma-
quinaria y estructuras, debido a su alta resistencia de compresion y a sus buenas ca
racteristicas de amortiguamiento. También se le usa en la fabricacion de cigheales
por su capacidad de amortiguamiento, su resistencia de corte por alto par torsional
¥ por su baja sensibilidad a la muesca, La facilidad que tiene su vaciado y sus exce-
lentes propiedades al desgasce permiten su uso extenso (exclusivo en algunos casos)
en la fabricacién de monobloques de motores, tambores para freno, superficies de
deslizamiento en maquinas, engranes, cubiertas de engranes, etc.
En aquellos casos donde resulta apropiado usar fundicion gris y no se le consi-
dere por tenerse esfuerzos de tensién significativamente altos, podré usarse una fun-
dicion gris de grado alto, Por ejemplo, en la fabricacion de valvulas, accesorios ©
tuberias y sus conexiones, se debe especificar fundicion gris clase 40, 50 0 60. Sin
‘embargo, el disetador deberd poner mucha atencion al factor costo ya que una fun-
dicion gris clase 60 cuesta de 2.5 a 3 veces lo que una de clase 30.
El diseftador antes de hacer sus calculos debera ser cuidadoso para seleccionar el
valor de E (médulo de elasticidad). Debido a que la curva esfuerzo-deformacién pa-
a hierros vaciados no es lineal, el médulo de elasticidad no es constante. Por lo mis
‘mo, se obtiene un valor arbitrario trazando una linea desde el origen de la curva
esfuerzo-deformacion hasta el punto correspondiente de resistencia de tension igual
a la cuarta parte de la resistencia de tension. La pendiente de esta linea se considera
que ¢s el valor de £.
Los hierros vaciados (de toda clase) no son facilmente soldables. Sin embargo,
mediante una adecuada preparacion (0 sea, precalentamiento, preparacion de la su-
perficie, seleccién del método de soldadura y varilla de soldadura) podré ser posible
Dbtener soldaduras. Debera tenerse cuidado con el calentamiento y enfriamiento
subsecuentes de secciones no uniformes para no causar la rotura del vaciado.
Fundici6n nodular
La fundicion nodular (también llamada hierro dei) consiste de un grafito de forma.
esferoidal dentro de una matriz de acero. El grafito de forma esferoidal es debido a
la adicién de cantidades pequefias de magnesio (por ejemplo, en forma de aleacion
de niquel-magnesio) o de cesio a un hierro de sulfurizado fundido antes de efectuar
cf vaciado. En contraste con la fundicién maleable, la fundicion nodular se forma
durante la solidficacion y no requiere de templado.
La matriz puede ser predominantemente ferrtica 0 mezclas de ferrita y hierro
perlita. La fundicién nodular con no més de 10% de perlita se le llama hierro ferri-
tico. Es un hierro tenaz, dictil con buena maquinabilidad. Las estructuras matri-
ciales que son predominantemente perlticas se les lama hierro nodular perltico y
pueden ser obtenidas por vaciado 0 por tratamiento térmico." También es posible
‘obtener una matriz que sea martensitica"* por calentamiento y despues templado (0
Alvearamiento térmico aqui usados le lama normalized 1 procedimiento consis en dar un cle
tamieno hasta avba dla nea A ¥ desputs un ensamienc en ace (Vase la Fig, 2.)
"Cristal en forma de aguas dspuestas al azar que son durasy restates. Tal mari una solve
Propiedades metalirgicas de materiales de ingenieria 41
sea, enfriamiento répido) en aceite o en agua. Las estructuras martensiticas son mas
Tesistentes y duras que las de hierro ferritico 0 perlitico. Sin embargo, el hierto per-
litico aunque no es tan ductil como el ferritico, es mucho mas resistente.
Se puede obtener una matriz austenitica agregando cierios elementos de alea-
ign, Tales estructuras exhiben buena resistencia a la corrosion y deslizamiento para
temperaturas elevadas,
La fundicion nodular es mas resistente, mas duct, tenaz y menos porosa que la
fundicién gris. Se le usa en la fabricaciOn de cigiefiales, pistones, cabezas de ci-
lindro, rodillos de formacion, poleas, dados formadores, etc. En la Fig. 2-5 se mues-
tala microestructura de una fundicion nodular ferritica y de una fundicién nodular
perlitica. Las propiedades mecanicas de la fundicin nodular pueden obtenerse en la
‘Tabla A-I del Apéndice A.
ado
El hierro vaciado acerado se obtiene colocando “*barras aceradas"” metalicas dentro
del molde pero cerca a su superficie. A medida que el metal fundido es vaciado, la
parte del vaciado en contacto con las barras aceradas se enfria mas rapido. Esto pro-
Guce una superficie de fundicién blanca la cual es predominantemente cementita y
pot tanto, es muy dura, Abajo de esta superficie el material es fundicion gris, Et
hierro vaciado acerado solo puede maquinarse con rueda esmeriladora y se le usa en
dados para estampado, molinos y rodillos para trituracién, ruedas de ferrocarril,
atc.
Hierro vaciado ai
Hierro vaciado al
‘Ademas de los tipos comunes de hierros vaciados antes mencionados hay varios ti-
pos de hierros vaciados aleados. Estos hierros contienen diferentes elementos de
aleacidn."* Si se controla la rapidez de grafitizacion, estos elementos pueden desarro-
llar algunas caracteristicas especiales, tales como propiedades mecanicas mejores,
mejoramiento de la resistencia al calor, corrosién, desgaste o fracturas frésiles,
‘También con la aleacion pueden mejorarse las propiedades tanto de fundicién come
de maquinabilidad de los vaciados. Algunos elementos de aleacién comunes son
niquel, cobre, cromo, molibdeno y vanadio. Muchos hierros vaciados aleados sor.
materiales patentados de diferentes compailias. Por ejemplo, Ni-Resist que es une
aleacion de niquel, cromo y manganeso, es un producto de la International Nicke!
Company. El hierro vaciado Methanite, producido bajo proteccion de patente, s¢
hace con la adicion de aleaciones de calcio-silicio. Se producen varios grads de Me:
ehanite, Véase la Tabla A-l en el Apéndice A para propiedades de algunos hierros
aleados.
"Et ecor ao deberdsonfundirimpurezas aes como manganeso, Fosfor so
tos dea slat, Los process para produccin en masa de aero, hero vaciado, materiales n0 fer
Son, st, no estin disehados para soprimie completamente :oas las impureas
Fig. 2.8 Microestuctura de (a) Fun:
ieee nodular fortica 128 x y (b
Fundicion nodular peritica $00 x
[Contesia de The international Nickel
Company in|
Propiedades metalirgicas de mat-riales de ingeniera 49
SeCciON26
Tratamiento térmico de aceros
Se define al tratamiento térmico como un calentamiento y enfriamiento de un metal
de aleacién para alterar sus propiedades mecanicas. Estas alteraciones son muy va-
rladas y tienen diferentes abjetivos. Por ejemplo, un tratamiento térmico pudiera ser
para darle més resistencia y endurecimiento a un metal, relevando sus esfuerzos in~
fernos o solo para endurecimiento de su superficie o et recocido de una pieza estirada
en frio 0 para mejorar su maquinabilidad por esferoidizacion,
‘La parte mas importante del diagrama hierro-carbono para el tratamiento tér-
mico del acero, es la que involucra la transformacion de la austenica de la region,
pot abajo de ia temperatura critica inferior (véase la Fig. 2-1). La transformacion de
Eustenita, con enfriamiento lento, principia en la linea de temperatura witica supe
rior 4,0 4., realmente fa transformacion tal vez empiece a alguna temperatura me
ror coma antes se indicé en la Sec. 2-3). En esta linea e! hierro gamma es transfor
mado a alfa con una cantidad pequena de carbon intersticial (que es ferrita). me-
ddida que la temperatura continda bajando a través de la region de transformacion.
se precipita mas carbon fuera de la solucién formando cementita (Fe,C) porque el
hierro alfa no puede retenet tanto carbon como el hierro gamma,
'A medida que transcurre el enfriamiento la linea critica inferior produce un ace-
ro hipoeutectoide (perlita ferrita) o un acero hipereutectoide (perlita y cementita) 0
tun acero euteccoide (perlita), El acero que eventualmente se produzca dependera so-
lo del contenido de carbén.
‘Sin embargo, sila Velocidad del enfriamiento es tal que la temperavira de trans
formacion (Aro Ar,,) 5 mucho menor que la de transformacion de equilibrio, hara
{que se reduzea fuertemente el tiempo necesario para que el carbon se propague fuera
de la solucion. Como resultado de esto, el hierro gamma en realidad no puede trans-
formarse a hierro alfa porque el carbon permanece ain en la solucién. En conse
cuencia se formaré una solucion solida supersaturada de carbon. Esta estructura 6
flamada martensita (también conocida como martensita fresea) y se muestra en la
Fig. 26. La estructura de la martensita tiene un arreglo al azar de especie de agujas
blaneas y es muy dura ¢ inestable. Es importante notar que el cambio de austenita &
‘martensita involucra un aumento de volumen. *
Resulta obvio que la velocidad a la cual toma lugar la transformacion de la aus-
tenita a marcensita es muy significativa para prevenir la formacién de constituyentes
suaves, Entonces para un acero de composicion quimica fija y tamaito conocido de
trano de austenita (o sea, temperatura de la austenita), hay una velocidad de en-
friamiento que transforma toda la austenita a martensita. Esta es la llamada veloc-
dad critica de enfriamiento, Si por alguna razon se suspende el enfriamiento durante
ta transformacion, entonces no podra continuar la transformacion. La temperatura
ala cual la martensita empieza por primera vez a formarse se le designa por M,. La
temperatura a la cual se ha formado completamente la martensita se le designa por
M, Sin embargo, para una aleacion cualquiera, la velocidad del enfriamiento no
scenitacstin mts densamente empacados que ls tomes dela
'© Ea er debido & que fos Somos de
4M Disefo de maquinas—tworl y préctca
ai
finite Sy
Sas ae:
is
tendra efecto sobre la temperatura M, 0 en el impedimento de la formacion de mar-
tensita.
[La martensita es el agente que contribuye a la dureza del acero. Resuita aparente
que debe tenerse snficiente carbon para producir suficiente martensita. Entonces, el
limite hasta ef cual un acero puede ser endurecido, dependera solo del contenido de
carbon, Aceros con menos de 0.35% de carben no se consideran comercialmente
templables.'” Aceros con contenido de carbén de 0.35—0.70% (son los llamados
aceros carbon promedio) proporcionan los porcentajes mas altos de incrementos en
urezas, Como resultado de esto, los aceros carbén promedio son los que general-
mente se consideran en los elementos de las miquinas, porque éstos pueden ser en-
durecidos conservando a su vez su ductilidad.
Los aceros de alto contenido de carn son templables, pero debido a la distor~
sidn, aladeo o agrietamiento que resulta de un enfriamiento rapido, su uso se limita
sélo a casos especiales.
{Al proceso de enfriamiento ¢s llamado templado y la rapidez a a cual el calor es
eliminado depende del medio en que se efectie el templado. Un buen medio para
"No debe pasate pr at qu a martensta alfa a pesar de togo por formarse con una velocidad de
entnamieno my sveds
Propindadles meralirgicas de materoles de ingeniena 45
templar permitiré inicialmente un enfriamiento muy rapido y después reduciendo la
velocidad del enfriamiento a temperaturas bajas hard que se minimice la distorsion,
Con el fin de disminuir el efecto de la distorsion y el agrietamiento son muy usados
los siguientes medios para templar: (1) agua con una solucion de 10% de sal, (2)
simplemente agua, (3) sales liquidas, (4) aceite soluble y agua, ($) aceite y (6) aire.
‘Después del templado, la martensita esta tan dura y frigil que resulta ser de po-
co uso practico. Para relevar los esfuerzos internos por consecuencia del templado,
al acero se le da un tratamiento llamado revenido con lo que se reduce la dureza y se
‘mejora tanto la tenacidad como la ductilidad. EI proceso de revenido involucra un
recalentamiento de la martensita inestable a una temperatura inferior a cy, mante-
riendose en esta temperatura mediante un periodo fijo de tiempo (por ejemplo, +h
y después se hace enfriar al acero en aire, hasta la temperatura ambiente, Por
ejemplo, un recalentamienio de 150-400 °F, relevara los estuerzos pero reducira 1a
ddureza en una cantidad pequeta.' Cuando se aumente la temperatura del revenido
se obtiene un acero con mayor facilidad de deformacién, menor dureza y mayor
ductilidad.
En la Fig. 2-7 se muestran esquematicamente los posibles cambios de varias
estructuras micrograficas de revenido a diferentes niveles de temperatura. También
se muestra en la Fig. 2-7 que si un acero endurecido es revenido hasta un punto in-
mediatamente abajo de Ac, y se mantiene alli por un tiempo grande, la cementita
toma forma globular o esferoidal. A esta estructura se le conoce como esferoidita.
Esto es producido no solo como una secuencia en el ciclo endurecimiento-revenido
antes descrito, sino que es un método ya establecido de recocido (que se tratard des~
pués). Para ilustracion del efecto de revenido en un acero, refiérase a la Tabla At
del Apéndice A. En esta tabla puede observarse, que al aumentar la temperatura del
revenido, disminuye la resistencia a tension y 1a dureza mientras que se aumenta la
reducci6n del Area, alargamiento e impacto Izod.
f ] serene areas
1
sare
| carmen
ig. 2:7 Diagrama de flujo exquematico para endurecimiento y revenido de un acero. La mar
tensita afa (2) 28 inestable y'a martensita beta (J) es estab.
T BOO 7, la martensita mestable (sea, martensita fra), e welve marensca stale. A est aeunas
46 Disefio de maquinas—teoria y préctica
SECcION 27
Diagramas de transformacion isotérmica
El estudio realizado en la Sec. 2-6, es un repaso breve del cambio de fase que toma
jugar cuando la austenita es transformada a martensita mediante un remplado r4pi-
do bajo condiciones de equilibrio. Sin embargo, la combinacién tiempo-temperatu-
ra ia oval la austenita es transformada, puede marcadamente afectar la estructura
esultante para esa temperatura, Por lo mismo, pudiera suceder que no se ogre el
‘bjetivo principal del tratamiento térmico (obtener las propiedades mecinicas de-
Seadas). En otras palabras, podemos preguntarnos, ;cual sera la estructura final y
sus propiedades mecénicas, si dejamos que la transformacion empiece a temperatu-
fas menores que [a del equilibrio (o sea, a temperaturas subcriticas) y después se cem-
pla el metal?
Esta pregunta se contesta mejor mediante el uso de los diagramas de transfor-
macidn isotérmica (I-T) (tambien conocidos como diagramas TTT 0 S).""La Fig. 2-8
‘nuestra un diagrama tipico I-T, Estos diagramas se obtienen corrando especimenes
pequetos de una barra de acero con un contenido especifico 0 de una aleacion deter-
fuinada, La primera curva S de la izquierda es donde empieza la transtormacion y la
Curva extrema derecha corresponde al final de las transformaciones. La forma de to-
dos los diagramas es muy parecida excepto para un acero eutectoide al carbon para
1 cual se pierde la linea gruesa del centro en la parte superior del diagram.
‘Salvo pocas excepeiones los diagramas se desvian ala derecha (o sea, aumentan-
dose el tiempo) al aumentarse el contenido de la aleacidn o el tamao del grano de ia
fustenita a temperaturas mayores de alrededor de 900 °F. Este es el punto donde se
flexiona la curva sobre si misma teniéndose un retroceso que se le llama la ““rodi
lta" o la “naria” de la curva de inicio. Las partes punreadas de las curvas indican
cierta incertidumbre con respecto a fa exactitud dela curvatura, Mp Mioy Mog signi-
fican respectivamente el principio de la formacion de martensita, el $0% de forma
sion de martensita y el 90% de formacion de martensita. Nétese que no todos los
diagramas I-T tienen los valores calculados para el porcentaje de martensita forma-
dda. Muchos diagramas tienen valores de M basados en experimentaciones,
Empezando por la parte superior de la Fig. 2-8 observamos que a medida que
disminuye el valor de la temperatura subcritica, se ceduce también el tiempo al cual
ta transformacion empieza junto con el tiempo de la transformacion. El tiempo mas
corto de iniciacion y completado de la transformacién esta en la “rodilla” de la cur-
‘va. Con una mayor reduccion de la temperatura subcritica, se aumenta tanto el ini
Go de la transformacion como el tiempo para la ransformacion. En la parte derecha
de la Fig. 2-8 se muestra Ia estructura a la cual la austenita cambia y los limites de va-
Jores de temperatura a los cuales ocurre el cambio. Esta informacion normalmente
no aparece en los diagramas I-T pero se puso solo para fines de aclaracion. Real-
mente en los diagramas se indica al constituyente de cada fase por una letra y leyen-
da apropiada tal como puede observarse en la Fig. 2-8. Obsérvese que las curvas [-T
TTTPT apni las sigs de tempo-temperaturaransfrmasin, Se wa tambien el crn digrama S
porque acura cel diagrams se parece la era S, Un juego excelente y completo deexascuras puede
DShlenerse dela U.S. See Corporation.
Propiedades metalirgicas de materiales de ingenierla 47
ration. ]
48 Diseio de méquinas—teoria y préctice
son asintoticas ala linea de 1333 °F. Esto implica que se requiriré de un tiempo inf
ito para convertr austenita a perlita. Este concepto esta en completo acuerdo con
drerterio de transformactin de las (ransformaciones establecidas en el diagrama
hierro-carbono, 0 sea, existen las condiciones de equilibro.
TRecuérdese que la austenita, una vez que se ha transformado completamente @
tuna temperatura particular, no formaré ninguna otra fase al ser enfriada @ una tem-
peratura menor. Si por ejemplo, deseamos formar bainita® o martensita con el ace-
Po 1062 en la Fig, 28, ¢s obvio que [a austenita debe enfriarse rapidamente hasta
‘proximadamente 500 °F en 0.75 sy permanecer a esta temperatura mediante apro-
Nimadamente 1 h para asegurar la transformacion completa. Para cualquier tiempo
qaferior a Ih se dara por terminada la transformacion en la region A + F + C. En-
tonees al enfriarse hasta la temperatura ambiente se cambiard un porcentaje (depen-
ddiendo del tiempo en la region A + F + C) deaustenita a martensita completa y el
restance menor 2 bain.
Para este ejemplo surgen dos preguntas. (1) “Como es posible tener
enfriamiento desde, digamos, 1500 a $00 °F en un tiempo de 0.75 52” (2) ““aNo es
Thun tiempo muy grande para esperar a que se tenga la transformacion completa?"”
La respuesta a estas preguntas es principalmente una decision de diseno. Si el mate-
ral es muy delgado (por ejemplo, agujas de un rodamiento de agujas) y se tiene un
medio para templado muy rapido tal como agua de hielo o salmuera helada, si sera
posible templar hasta 500 °F en 0.75 s. El templado répido (para el acero 1062) es
Recesario para evitar tocar fa ““rodilla"” o pasar a 950 °F en Ia curva del diagrama
[oT Sila curva de enfriamiento toca la “‘rodilla” (o entra a la region A + F + ©)
se formara algo de perlta. Esto no es deseable si se requiere solo formar bainita y
marensita
‘Si un componente grande va a endurecerse hasta el rango de la bainita-
martensita, esto sera dificil de lograrlo sin Ia formacion de algo de perlta. En caso
dde que las propiedades mecanicas sean satisfactorias para el diseador, éste tendra
{que hacer su decisin después de considerar muchos factores.* La respuesta a la pre-
funta de mantenerse a 500 °F durante 1 h depende del equipo disponible y de si el
tiempo se ve afectado de acuerdo al ritmo de la produccién. Un aspecto que el dise-
fador puede investigar para suavizar tales problemas es investigar otro acero al car-
bon 0. si es necesario un acero de aleacion donde la “‘rodilla”” del diagrama [-T
‘quede mas ala derecha sobre la escala del tiempo. Por tanto, los diagramas I-T pro-
porcionan al disefador un gran campo para escoger los aceros que tengan la resis-
fencia y tenacidad para satisfacer las necesidades del disefto.
‘Debido a que realmente podemos medir las coordenadas temperatura-tiempo de
tun espécimen de acero cuando se esta enfriando (independiente del medio en que se
haga el templado), es posible construir un diagrama [-T muy adecuado y descripti~
‘yo. Todo lo que debera hacerse es superponer los valores de temperatura-tiempo de
niriamiento sobre el diagrama [-T. En la Fig. 2-9 se muestra la superposicién sobre
3 [abana formalment ama coos se forma ene 90 y 700 °F ye parecida al evita En es:
ta reponse lama basta pumosa 9 superior. En an rango menor de 700 500° ala ransformacion
‘ele llama Santa ascular 9 menor y empieza = parestiea la marten
5) esutenca, cst, aplenton, condiciones ambentals, contidad producia, ee
Propiedades metalirgicas de moteriaes de ingeniera 49
Fig, 2.9 Diagrama hipotétice LT de un acara eutectoide con curvas de entriamiento super
puestas. Los nmeros en circulos son para distinguir ls diferentes velocidades de enfriamien-
to y las Sineas crvzadas indican la wansformacién. (Cortesia de S. H. Avner: Introduction to
Physics Metallurgy. McGraw-Hill Book Co., Ine., New York, 1964
un diagrama hipotético -T. Las curvas de enfriamiento estin umeradas del | al7 y
cada una representa diversas velocidades de enfriamiento.
‘La curva I, tiene la mas baja velocidad de enfriamiento, empieza su transforma-
cin en x,y la completa en x, Aunque et cambio de temperatura durante la trans-
formacién fue pequeho, el tiempo de transformacion fue relativamente grande. La
estructura del material transformado es perlta gruesa (material suave y dictil) y ésta
podra reener su estructura a medida que sea enfriada de x{ hasta la temperatura am-
Diente independiente de la velocidad de enfriamiento. La curva 1 es tipica de un re-
cocido convencional. La curva 2es también un proceso de recocido. Sin embargo. el
material es primero enfriado més rapidamente hasta la temperatura seleccionada,
2 y permanece dentro del rea de transformacién con un pequefio cambio de tem-
perature. Como rena desta s dbtene algo de err peri fin ir
Lacurva 3 es tipica de lo que se lama normalizacion®la cual es realizada a una
velocidad de enfriamiento algo mayor que para un recocido (curva 1). La estructura
ste wring es exleado ef Se. 29.
50. Disefio de méquinas—teorle y prbctica
resultante ¢s una perlita media, La curva 4 tiene velocidad de enfriamiento mayor
fque la curva 3, produce una estructura perltia fina
La curva $ es de mucho interés porque resulta una mieroestructura mixta y tiene
una pendiente de 25% con respecto a la finea A + F + C dentro de la region de
transformacion, En x. empieza a formarse la perlita fina y completa su transfor
tnacion en x, En este punto, sdlo el 254% de la austenita inestable ha sido transfor-
tmada a periita fina. Queda un 75% @ transformarse. Una inspeccion del punto
1 abajo de la Tinea sombreada indica que la curva de enfriamiento son lineas de cor-
we tno mostradas en la Fig. 2-9) con menos de 25% de perlita. Por tanto, no se tendr
‘as teansformacidn abajo del punto x; hasta que el enfriamiento llegue a.x3 en cuyo
onto el 73% dela austenita empezar’ a converse en martensita completandose su
Pambio nla linea M La estructura resultante consiste de 25% de pertita dentro de
tina matriz marcensita de 75%
[a curva 6 representa un templado extremadamente rapido en la que se muestra
que la microesteuctura cotal es martensitica. La curva 7, que es tangente a 18 '*ro-
dilla”" de la curva de la transformaci6n, representa Ja velocidad de enfriamiento
limite para producir estructura martensitica completa. Esta velocidad limite de en
ftiamiento es la velocidad critica de enfriamiento mencionada al principio de esta
secelon. Una mejor explicacion y estudio con més detalles de los diagramas I-T, ve
Tocidades de enftiamiento, ete., pueden obtenerse en la Ref. {2}, Es de importancia
tmencionar que las curvas de enfriamiento 4 5, 6y 7 generalmente se usan en el reve:
nido para relevacion de esfuerzos internos.
Martomper y austemper
Con la ayuda de los diagramas I-T es posible “‘proyectar” nuevas trayectorias para
tratamientos termicos. Dos de tales trayeccorias se conocen como martemper y aus
temper, En las Figs. 2-10 y 2-1] se muestran exquematicamente dichos procesos
Ten el martemper, el acera es templado (por lo regular, en un bafio de sal fundi-
da) a una temperatura ligeramente mayor a M, Este permanece en el baflo hasta que
todas las secciones transversales del acero estén a la temperatura del bao. Después
ve saca el acero del baAo, se le deja enfriar en are hasta que se forme la martensita, y
después es revenida como se muestra en la Fig, 2-10. La finalidad del martemper es
prevenir [a distorsion y cualquier tendencia a producir agrietamiento por el temple
Bo. Las piezas grandes de acero que deban templarse a durezas altas estn muy pro-
peasas a quedar con estas caracteristicas indeseables. Sila velocidad del templado no
Pro suficientemente rapida, pudiera no pasar por completo la “rodilla", con el re
Sultado de tener algo de bainita en la estructura final. Sin embargo, la distorsion ¥
tendencia a agrietarse serdn grandemente minimizadas.
‘Austemper es un proceso de endurecimiento donde la microestructura resuleante
es dura y tenaz (bainita) y no se tiene [a necesidad del revenido. Con referencia a la
Fig. 211, vemos que de nuevo el acero es enfriado arriba de la linea Ae, mediante un
templado rapido en un bafio de sal fundido hasta una temperatura justo arriba de
‘M, Mientras se permanezca en el baft el acero, es isotérmicamente transformado
fen bainita, después de lo cual se le deja entriar en aire. La bainita resultante es desde
Iuego dura, pero no tan tenaz como la marvensita. Al seleceionar la temperatura iso-
Propiedades metalirgices de materiales de ingenierla 51
Si S
=
I\\\\\
Fig. 2.10 Gites esquemstica que muestra la elacin de martmper hata
I-T. [Cortesia de U.S. Steet Corporation.) ern 1" dsrame doce
térmica, sera posible lograr tener una variedad de combinaciones dureza-tenacidad
sin hacer el revenido. Generalmente, el proceso se limita a piezas de poco diametro
porque la temperatura del bao retarda |a velocidad del enfriamiento.
Templabilidad
Se puede definir la templabilidad como la caracteristica de un acero que determina
su profundidad y uniformidad de la dureza resultado del templado. Como aprendi-
‘mos en la seccién anterior, la transformacion isotérmica puede retardarse (0 sea, la
tendencia de mover las curvas [-T a la derecha) por la adicién de un(os) agente(s) de
aleacién o al aumentar el tamatto de grano de la austenita. Entonces, aun con veloci-
dades de enfriamiento relativamente bajas puede producirse una estructura marten-
sitica completa a la temperatura ambiente, Por lo general, no son recomendables
52. Diseio de mBquinas—teoria y préctica
\
KD
Fig. 2-11 Grifica asquemdtica que muestra ia relacion de austemper a un diagrema tipico IT.
[Cortesia de U.S. Steel Corporation.
|granos de tamafo grande, porque los aceros endurecidos pierden tenacidad con los
templados subsecuentes. También los granos grandes estin propensos a agrieta-
miento o distorsion en el templado.
Hasta este punto se ha analizado a la templabilidad (incluyendo a las secciones
previas) en términos de diversas transformaciones requeridas para obtener diferen-
tes niveles de durezas, ;Pero qué con respecto a Ja profundidad de fa dureza en un
cespécimen de acero? Si todo es igual, :podemos esperar que se tenga la misma dure-
aa través de la seccién transversal de dos barras de acero de didmetros diferentes
‘cuando ambas tienen tratamiento térmico igual” jLa respuesta a esperarse es no! De
hecho, debido a que para cada grado de acero al carbén o de aleacion se puede tener
variacion en su composicién quimica especificada, muchas barras del mismo
didmetc y sujetas a tratamiento térmico idéntico tendran diferentes valores de dure-
22 tanto en sus superficies como en los interiores.
‘Otros factores que afectan la templabilidad son las relaciones tamaito forma del
‘componente y la condicion de su superficie. En realidad las operavivucs de templado
Propiededes metaldroicas de materiales de ingenierio 62
son un fendmeno de transferencia de calor; por lo tanto, la velocidad a la cual es
extraido el calor dependerd de la masa del Area superficial de la conductividad del
metal, del coeficiente de transferencia de calor superficial, y de la diferencia de tem:
peratura entre el metal y el medio del templado. Obviamente, el calor sera extraido
con més rapidez de esos componentes si se tienen relaciones altas de masa a superti-
ce y no hay incrustaciones que actiien como aislantes,
La prueba de Jominy (3)
Para un diseRador, le resulta problemstico la tarea de especificar la dureza conside-
rando los periles complicados y la variedad de aceros que se tienen. Por fo menos
debe estar razonablemente seguro de las estipulaciones obtenidas. Por tanto, se han
disenado varias pruebas para medicion de la templablidad. Hay una prueba entre
‘muchas, que tiene amplia aceptacién. Esta es la llamada prueba de Jominy {3] (co-
nocida también como prucba dela templabilidad, tempieen un extremo) que ha sido
estandarizada por la ASTM (por ejemplo, A2S5-481), Ia SAE y la AISI. En la
prueba, los parimetros que afectan la profundidad de fa durea son constantes de
an espécimen a otro. Debido a que la Unica variacion en los especimenes es la com=
posicion quimica, la templabilidad solamente puede ser indieada por la profundidad
det endurecimiento.
El espécimen de la prueba es una barra de | pig de didmetro, 4 ple de largo,
teniéndose un diametro mayor en un extremo con el fin de poderio colgar vertical
mente en un sostén fio.” La barra es calentada hasta na temperatura adecuada de
austenizacién en una atomosfera inerte (para evitar la formacion de cascarilas), es
sacada del horno y colgada verticalmente cn un sostenfijo. Se e pasa una corrente
de agua a 75:15 °F en el extremo inferior delespécimen colgado. El diametro dela
tobera es + plg y la presi es tal que se puede desarrollar una columna de agua de
24 plg con la tobera en posicion vertical. Cuando el aparato haya sido ensamblado,
la parte inferior del espécimen queda + pig arriba de fa tobera. Como resultaco de
esto, después del choque en el extrema inferior del espécimen, el agua que fuyefor-
sma una figura esérica. En la Fig. 2-12 se muestra ala barra puesta en el sostén y que
esta siendo templada
Después de 10 min de remplado la barra es quitada del sostén y se le hacen dos
planos paralelosiongitudinales en lados opuestos. La operacion de esmerilado se ha
cehasta una profundidad de 0,015 pg. Se mide la dureza Rockwell vease la Sec. 2
¢n los planos esmerlados a distancias de fp en el extremo templado, Se traza una
curva de os valores de las durezas contra fa distancia medica desde el extremo de
ta barra, En la Fig. 2-13 se mucstran varias curvas representativas para diferentes,
aceros.
Un acero con buena templabilidad es aquel para el cual el valor de las durezas
no bajan muy rapidamente con respecto @ las distancias medidas en el extremo
templado, Tal aera es llamado acera de "endurecimiento profundo”, mientras que
1 4620 obviamente no puede ser clasificado como tal. Por tanto, el 4620 es llamado
acero de “endurecimiento no profundo’”. Porque el espécimen probado experimen-
3 Nozese que todos os espeimenes denen elacions jas de masa asuper
smenes son ae ales dimensiones.
ya que odes los espe
54 Diseio de mBquinas—teoria y préctica
Fig. 2:12 Prueba de templabiidad term
pada en un extreme, barra en el sostén
pera sfectuar el terplado. (Cortesia de
U'S, Steel Corporation.
18 una degradacion de velocidades de enfriamiento alo largo de la barra de templa-
do rapido en el extremo, donde se aplicé el agua con respecto del otro extremo en
{gue cl enfriamiento se realiz6 con aire, y debido a que la velocidad de enfriamiento
cs independiente del tipo (0 sea, la composicion) de acero, es posible convertir la dis-
fancia y durezas del extremo templado @ la misma dureza en el centro de una barra
de acero de diametro equivalente sujeta a un medio de templado diferente." Como
resultado de los datos de la prueba de Jominy® podemos con confianza especificar
fa dureza de una pieza més grande con el fin de selescionar econémicamente un acero.
Debido a que los resultados de la prueba Jominy han probado ser reales, resulta
posible seleccionar tn acero por templabilidad con parametros igual que para el caso
de composicién quimica, tamaio de granos, etc, fo cual hace que esto iltimo sea
menos importante. La AISI y la SAE mancomunadamente han establecido bandas
de templabilidad para casi todos los aceros de aleacion. Estas bandas son curvas
de templabilidad Jominy minimas y maximas y han sido determinadas en cientos de
‘watamientos térmicos hechos para cada acero de diferentes grados. Los aceros que
son espeeificados y comprados sobre esta base son designados por la letra H. En la
Fig 213 se muestra al acero 4140 H el cual puede comprarse sobre la base de banda
de templabilidad. Los aceros H estan garantizados para satisfacer la templabilidad
‘minima y maxima. Estos aceros con las posibles variaciones de tempiabilidad mini-
sma y maxima no deben confundirse con los aceros que estan definidos de acuerdo a
Jos limites de su composicién quimica. En la Fig. 2-14 se muestra esta distincion para
el acero 4140,
Br mtoda de conversion estado en la Ref
% vease USS. Cailoy Sets, The Urted Stats Stet Corporation, Pesburg, Pa
Propiedades metalirgicas de materiales de ingenierla 65
Fig. 2-13 Curvas de tempiabilidad. Los materiales mostrados fueron seleccionados para
mostrar ia ciferencas, Notese que la dureza del AISI 4240 no cambia con ta profuniad, que
11 et des ato Contrada de carbon tone fa super ms endure, que om acoas
Sigua concn ce carvan 940713, teren pebtcamerto mona sues seperica a
Spot awl 509 Ge ines boosie do atone auimente S795 Ccosae anes
Fe oer beret arent ety Sane hive eet
pen re epee opin pore opetieptl atop ution
tate aero: une nara dl 46 Ge 2g elas an wee ton como un aoa
i" "ones de Bationen San Corportan |
Fig. 2-14 Las lineasllenas son para acero banda H. Las ineas de puntos son para acero 40
bbasado de acuerdo ala composicion quimica. (Metals Handbook, Ba Ed. Vol 1. American So-
ciety of Metals, Metals Pack, Ohio, 1981.)
56. Disefo de miquinas tears y prbctica
Fig, 218 Durezas minimas de terplado para obtener las
mejores propiedades después del revenico, de acuerdo
Gon al contenido ce carbon, (Cortesa de U.S. Steet
Corporation
Para usar las curvas de la Fig. 2-14, es necesario conocer la dureza en algiin pun-
to interno de alguna barra de acero en particular. Estas curvas también pueden usar~
Se para determinar el contenido de carbon (usando la relacion entre carbon y dureza)
de un acero satisfactoriamente templado y revenido. Se disponen de series completas
ie grafieas" para otros materiales diferentes a los mostrados en la Fig, 2-14. Tam-
bién hay graficas de dureza Rockwell contra contenido de carbon para diferentes
porcentajes de formacion de martensita. La Fig. 2-15 es representativa de dichas
raficas y quiza sea la de mayor ilidad, Esta podra ser usada por diseftadores inex-
pertos para hacer la seleccian de un acero de suficiente dureza después del templado
J revenido con el fin de lograr propiedades Sptimas de cedencia. Nos referimos al
Bj, 24 para ilustrar el uso de la grafic.
emplo 2-1 Debio a qu odo al material de aceo de que capone en forma de bare ie
Fame enters y cota 134, matral de una Neca principal va cambiar
ers esca Scala an ako slash ura deo mata La eth
{hut sara estonam ia sual vara coninaamete de 02 $0000
penta dmv atin de cha endure yu za
Solucién: Para dar una solucién, aniciparemos algunas de las ecuaciones y datos de
las Sees. 3.22 y 3.24, Por tanto, tenemos
2)
5, = 500 x Nimero de dureza Brinell (BHN)
5, = 058, oy
5, = (25084)
Propiedades metalirgicas de materisles de ingenierla 57
donde S;, esfuerzo de ruptura por fatiga en Ib/pig? y S, resistencia ultima en Ib/plg*.
Deranterano sabe quel dameto ea lechs no debra ser mayor 4+ pe, debe-
ti aplzane un fator de correciin por tamafo ciyo valores 0.5 (vee a Se. 3-26)
Entonees tendremes
Sy = (085)250)BHN) « 215 BHN.
Sisuponemos un factor de seguridad de 50% (véase la Sec, 1-3), el esfuerz0 de rupee
+a por fatign sera
1.89, «215 BHN
Despejando BN se obtiene
pun — 15 #50000)
Dela Fig, 3-17 obtenemos un nimero de dureza Rockwell Cde alrededor de 38 para
BHN = 349, Regresindonos ahora 2 la Fig. 2-15, observamos que un acero con
contenido de carbon no menor que 0.18% producita la dureza deseada después de
templado y revenido. De la Fig. 2-13 puede verse que si usamos acero 1340, éte exce:
era ls requistos minimos de 0.18% de carbon. Tambien con flecha de 1; pig de
didmetro vemplaca en aceite y flecha de 1+ pig de didmetro templada en agua se tie
ne dureza Rockwell C de 38. @
Es importante aclarar en este punto que los problemas referentes a diametro de fle-
cha y esfuerzo no han sido debidamente analizados en el Ej, 2-1. Lo que se hizo fue
solo demostrar lo facil que es determinar a través de una dureza Rockwell C = 38
dos didmetros posibles de flecha de acero 1340, Es muy interesante observar que de
acuerdo a la Fig. 2-13 el acero de aleaciéri 4620 no satisface los requisitos de este
problema.
SECCION 29
Definiciones en tratamientos térmicos*
Con el proposito de tener un mejor enlace, se tiene en esta seccidn la definicion de
los siguientes términos referentes al tratamiento térmico. Algunos de éstos ya han si-
do mencionados, pero auevamente se presentan para completar su definicién. Algu-
19S otros términos son explicados por primera vez.
Envejecimiento. Es el cambio en un metal mediante el cual su estructura se recu-
pera de una condicion inestable producida por un templado (envejecimiento del
templado) 0 por un estirado en frio (envejecimiento por deformacion). El cambio en
la estructura es debido a la precipitacidn de uno de los constituyentes de una solu-
TEI simbolo @ indica fin de a solcion.
% Aigunas de las defiicones¥ descripcones extn basadas ee material contenido en el Machinery's
Handbook. Todos eto termings han so adoptados por la American Foundrymen's Association
(AFA), la American Society for Meale (ASM), la American Society for Testing Materials (ASTMO y la
Sovity of Attomoive Fngneer (SAF)
58 Disefo de méquinas—teora y prictice
cin sélida saturada, cesultando con ello un macerial mas resistente ¥ duro, pero por
fo general menos dUctl, Est tipo de envejecimiento toma lugar lentamenté ala tem.
erstura ambiente; podra acelerarse mediante un igero ineremento dela temperate
Py AI proceso entonces se le lama endurecimiento por precipitacion. (Véase ram-
bien relevado de esfuerz0s.)
Endurecimiento por envejecimiento. Es lo mismo que para envejecimiento
Recocido. Es un proceso que involucra calentamiento y enfriamiento que se usa
para indueir ablandamiento. Este término tambien se usa para cubrirtratamientos
tn los que se intenteeliminar esfuerzos, alterar propiedades [isicas 0 mecdnicas, pro-
Geir una microestructura definida y eliminar gases. Ciertos tratamientos térmicos
specficos de hierro de aleaciones base respaldados por el trmino recocido son re-
Seeido negro, azul, en cofie, brilante, complet, grafitizcién, maleabilizacion
recocid por tratamiento.
IReeoeido negro. Es un proceso de recocido en cofre de laminas de aleacion de
hierro-base, despues del rolado en caliente, corce y baflo quimicos para su lim-
lado.” El proceso no imparte color negro al producto que en siya lo tiene, El
Pombre se origind por la apariencia del material rolado en caliente antes del reco-
cido y del bafto quimico.
Recocido azul. Es un proceso de ablandamiento de aleaciones de hierro-base
en la forma de lamina colada en caliente, en el cual la lamina es calentada en hor-
fo abierto hasta una temperatura comprendida dentro del rango de transform:
Gin y enfriada después en aire. Es incidental la formacién de éxido azuloso sobre
su superficie.
IReeoeido en cofre. Es un proceso de recocido en el cual, para prevenir la oxi-
dacion, el metal ¢s sacado y colocado en un deposito cerrado con o sin empaca-
siento, Por lo general, la carga es apenas calentada hasta una temperatura menor,
pero algunas veces arriba o dentro de imite de Ia temperatura de transformacion
J después se le deja enfriar lentamente. A esto también sel lama recocido cerrs
‘do o recocido en olla.
‘gecoeido brillante. Es un recocido que por lo general se efecta en un horno
de atméstera controlada de tal modo que se reduce un minimo la oxidacion en
[a superficie y ésta queda relativamente brillante,
TRecoeido a la flama. Es un proceso de recocido en el cual la superficie de una
aleacion de hierro-base ¢s ablandada mediante calor aplicado por flama de tem-
peratura elevada en alguna parte localizada de la pieza.
‘Recocido completo. Es un tratamiento térmico andlogo al de endurecimiento
por precipitacidn, generalmente se aplica al hierro fundido para aumentar su du-
reza y resistencia.
‘Recocido por tratamiento, Es un procedimiento térmico que se usa con obje-
to de ablandar una pieza trabajada en frio en aquellos casos donde ¢l trabajo pre
vio en irio haya causado esfuerzos muy intensos y fragilidad, La aleacion de
hierro-base es caientada hasta una cemperatura proxima, pero menor a la que
corresponde al limite inferior del limite de transformacion y después es subse-
Ehiminaci de oxide del superficie metlica sumergindola en una slucon de reactivosauiisos ©
pot metodo eleeromecanicos.
Propiedades metalirgices de materiales de ingenieria 59
cuentemente enfriada, Este proceso produce menos costras que un recocido
completo
‘Austemper. Es un proceso de endurecimiento que consiste en templar una alea-
cidn de hierro-base por arriba del limite de transformacién en un bao isotérmico de
sales, para el cual las temperaturas pueden ser de 300 hasta 1100 °F. La temperatura
del bato dependera de los materiales y es mantenida ligeramente arriba de la tempe~
ratura M, de formacién de la bainita. El proceso por Jo general se aplica para piezas
pequetas.
Pavonado. Es un tratamiento superficial que se da @ las aleaciones de hierr«
base por Jo general en forma de laminas o tiras, en et cual por la accion de una c
rriente de aire a una temperatura adecuada, da lugar a la formacién de una pelicula
de Sxido azul sobre Ia costra libre que inicialmente se tiene en la superficie con el
fin de mejorar la apuriencia y la vesistencia ala corrosion. Este término también se le
usa para denotar un cratamiento térmico a resortes después de su fabricacién con el
fin de reducir el esfuerzo interno originado por el enfriamiento y el formado,
‘Acero cocido. Es un término aplicado a metales permanentemente dantados por
tun calentamiento proximo al punto de fusion o por la oxidacion intergranular. Este
dafo algunas veces es causado por un esmerilado incorrecto, el cual da como resul-
tado una decoloracion de la pieza de trabajo debido al calor.
‘Carbonitruracién, Es un proceso de endurecimiento superficial (vease endureci
miento superticial).
Endurecimiento superficial. Es un proceso donde la capa superficial (0 Ia cu-
bierta) de una aleacién de hierro-base es hecha sustancialmente mas dura que el
nicleo interior del metal, El endurecimiento superficial puede dividirse en dos cta-
ses. La primera, la cual incluye carburizacién, aitruracion, carbonitruracién y cia
nuracion, esta basada en la difusi6n del carbon o gas amoniaco hasta cierta profun-
didad de la superficie del acero. La segunda clase consiste de un endurecimiento por
lama o endurecimiento por induccién. Aqui, el cambio de temperatura superficial
se compara con la del nicleo, sin el agregado de otros materiales y enfriamiento sub-
secuente, se endurece la cubierta y no el nticleo del acero. En la Fig. 2-16 se hace una
comparacign de las variaciones posibles en profundidad por los dstintos métodos de
difusion.
Carburizacion. Es un proceso en el que se agrega carbon a la aleaci6n hierro
base sélida siendo ésta calentada alrededor de 1600-1700 °F estando en contacto
con el material carbonoso, el cual puede ser sblido, iquido o gas. La profundidad.
del endurecimiento depende del tiempo de exposicin en la atmosfera de carbon.
Después de un periodo de tiempo suficiente, el metal es templado y luego reveni-
do (por ejemplo, 300-450 °F) para producir el endurecimiento a la profundidad
deseada y la tenacidad en el nucleo. No todos los aceros pueden carburizarse.
‘Aceros con menos de 0.20% de carbon (hay uno o dos con aproximadamente
10,30-0.32% C) pueden ser tratados. Tales aceros son conocidos por sus grados de
carburizacion. (Véase en la Tabla A-3 del Apéndice A, una lista parcial de aceros
dde acuerdo a sus grados de carburizacion. En la tabla también se indican las pro-
piedades de la superficie y del nicleo.) La estructura de la superficie es hipe-
Teutectoide, mientras que ia del nucleo cambia de un acero eutectoide a la de un
acero hipoeutectoide a medida que la profundidad se aumenta.
60. Disefo de méquinas—teoria y préctca
l
(Tee mee
eee |
=
free ae ore ea
Fig. 2:16 Profundiaad del posible endurecido por diferentes
métodos de endurecimiento superfcal. [R. W. Bolz; roduc
tion Processes, Their influence an Design. The Penton Pub
shing Co,, Cleveland, Ohio, 1858.)
La carburizacion de metal encerrado (0 en cofre) toma lugar en piezas de ace-
ro que estan en contacto con materiales carbonosos tales como carbon vegetal,
quemado de huesos de animales, de durazno, coque, carbon mineral, ete
‘La carburizacion dei gas toma lugar cuando la pieza es calentada en una at
mosfera gaseosa similar a la del mecano (gas natural), propano, etano 0 butano
El proceso que se realiza en un horno rotatorio horizontal, por lo general, se usa
para producciones elevadas. El método se adapta muy bien para piezas pequetias
tales como bolas y rodillos de rodamientes, eslabones de cadena, ejes prquenos,
tornillos, ec.
La carburizacién liquida requiere que las piezas sean colocadas en un horno
de sales fundidas (por ejemplo, cianuro de sodio) donde el acero absorbe carbon
en su superficie; nuevamente, la profundidad de absorcion depende del tiempo de
inmersién. Las ventajas del bafto liquido incluyen una accion rapida, carburiza-
cién uniforme, distorsion minima y la eliminacién del empacado y desempacado
ue se utiliza con las mezclas carbonosas. En una carburizacion selectiva, las par-
tes de las piezas que no vayan a ser carburizadas se cubren con placas de cobre.
‘La earburizaci6n por lo general se hace en piezas tales como engranes, levas,
escantillones, ete., las cuales estan sujetas a desgaste. La principal desventaja de
Ja carburizacin es que las piezas por lo comiin tienden a torcerse. Sin embargo,
cLesfuerzo de ruptura por Fatiga esté usualmente afectado en forma positiva (véa-
se la See. 3-30, Carburizacién).
Nitruracion. Es un proceso en el cval las piezas ya maquinadas y tratadas tér
rmicamente son colocadas en una atmasfera de nitrogeno (gas amoniaco) dentro
de una caja hermética al aire y calentada de 950-1000 °F. Después de un perio~
do de exposicion al amoniaco se deja enfriar lentamente al acero. La superficie es
‘endurecida por el nitruro de hierro, el cual es formado al soltarse el nitrogen
combinarse con el hierro. Como resultado de lo anterior, no se requiere det
emplade y por lo mismo los aceros nitrurados no estin propensos a torcerse
Propiededes metairgices de materiaes de ingeniera 61
La nitruracion se aplica principalmente a ciertos aceros de aleacion que con.
tienen elementos tales como aluminio, cromo, molibdeno o vanadio. Estos aceros
aleados nitruran mejor que los aceros al carbono. Acero Nitralloy es el nombre
ue se le da a un grupo especial de aceros (por ejemplo, Nitralloy N, es un pro-
ducto de la Nitralloy Corporation). Sin embargo, también podran ser tratados al-
jgunos aceros al carbon (por ejemplo, 4340). Las propiedades del niicleo de la
pieza a la que se le va a dar el tratamiento térmico previo no resultan afectadas
por las temperaturas dadas hasta menos de 950 °F. Los aceros Nitralloy son ma-
{quinables tanto para el caso de tratamiento térmico como de un estado de recoci-
do. Antes de la nitruracién, la pieza debe ser recocida para relevar los esfuer20s
debidos a la laminacién, forja o maquinado. Las piezas que no requieran de tra-
tamiento térmico deberan maquinarse hasta las dimensiones requeridas,
‘La nitruracién produce una superficie extremadamente dura (por ejemplo,
Nitralloy N nitrurado a 970 °F tiene una dureza de 780 en la escala Brinell) y es
excelente para resistir al desgaste. El proceso tiene también efectos benéficos
sobre el esfuerzo de Tutiga de la pieza tratada (véase la Sec. 3-30, nitruracién) y
rmejora la resistencia a la corrosion y a la rozadura (0 sea, al agarre).
La nitruracion tiene algunas desventajas: el costo elevado del material, el
procedimiento es mas critico que para otros, el recocido de las piezas antes de la
nitruracion y la limitacion de maquinado a slo esmerilado (es un procedimiento
no recomendable a menos que sea realizado con mucho cuidado).
‘Algunas aplicaciones tipicas para nitruracion son levas, arbol de levas, cami-
sas interiores de cilindros y bombas, engranes, espigas, pemios de pistones, pisto-
nes, ejes de bombas, asientos de valvulas, piezas con ranuras o planos, placas su-
jetas 2 desgaste, rodillos para estirado de alambre, etc.
Carbonicruracién. Es un proceso de endurecimiento superficial para aleacio-
nes de hierro-base en las cuales canto el earb6n como el nitrogeno son simulténea-
mente absorbidos mediante el calentamiento en una atméstera gaseosa de com-
posicién adecuada (por ejemplo, hidrocarburos y nitrdgenos o mezclas de sales
fundidas que contengan materiales carbonosos y nitruros). Esto es lo que general-
mente se hace en cualquier templado o enfriamiento lento segin se requiera. Por
ejemplo, en una atmésfera que contenga 15% de amoniaco en el gas de la carbu-
rizacion puede obtenerse el endurecimiento sin necesidad del templado. Con
aumentos pequetios de amoniaco (por ejemplo, 1%) se requiere del templado.
‘Cianurizacién. Es un proceso de endurecimiento de piezas de acero maquina-
das por la absorcién simultanea de carb6n y nitrogeno en un bao de cianuro. La
temperatura del bafo esta entre 1450 y 1650 °F y el batto consiste de cianuro de
sodio (NaCN) en una mezcls liquida de sal. El porcentaje de cianuro varia en una
‘gama amplia, dependiendo del acero tratado y de las proporciones requeridas.
Sin embargo, la composicign mas frecuentemente usada consiste de 30% de
cianuro de sodio, 40% de carbonato de sodio (Na.CO,) y 30% de cloruro de so-
dio (NaC). Esta mezcla es muy estable y puede usarse para una operacién conti-
‘nua, Después de la inmersin en el bafo de cianuro, durante el periodo de tiempo
adecuado, la pieza debe templarse en un medio apropiado. El proceso produce en
aceros de bajo carbén una superficie de mucha dureza y de espesor muy pequeno.
La dureza es conocida como dureza superficial y debido a que la superficie se
[ 62 Disefo de méquinasteora y prictca
vuelve muy fragil, no puede resistir cargas de choque alto. Sin embargo, se pro-
‘duce una capa muy delgada de superficie muy resistente al desgaste.
“Endureeimiento a la flama. Es wn proceso de endurecimiento superficial dei
acero calentindolo hasta una temperatura superior a la temperatura de transfor
macién por medio de una flama de temperatura elevada y después se hace ¢l
templado en un medio caistico, salmuera, agua, aceite o aire. El medio usado en
¢§ templado es por lo general rociado sobre la superficie, pero en algunos casos la
pieza es introducida en e! medio. Este método de endurecimiento ¢s especialmente
itiizado en piezas grandes (por ejemplo, aceros forjados y vaciados, los cuales
deben maquinarse antes del sratamiento térmico) o bien de piezas que tienen
mano o forma irregular que no pueden realmente colocarse en un horno o en. un
Sano. fa fuente de calor es un soplete oxiaeztlénico con el cual se calienta rpi-
damente la superficie de la pieza de acero. El soplete puede tener boquillas mil-
tiples y tambien estar equipado con agujeros para la atomizacion del medio usado
en al templado
Extrictamente este método no es de endurecimiento superficial ya que no se
tiene ninguna difusion. Con este método pueden endurecerse aceros de bajo y me-
dio porcentaje de carbon. Ls aceros con contenido de carbon entre 0.40 y 0.45%
adquieren nucleo de propiedades excelentes después de este tratamiento. Aceros
de carbon alto (por ejemplo, mayor que 0.60%) también pueden endurseerse por
flama pero debe tenerse mucho cuidado después del templado para no producir
agrietamiento. Para cantidades grandes de produecidn, tales como endurevimien-
to de engranes, de piezas ranuradas, ces, et., se usan maquinas especiales
Endurecimiento por induccién. En este procedimiento de endurecimiento, 'a
pieza es colocada en un campo cléctrico de alta frecuencia que puede ser variada
esd 500 hasta 15 000 000 cps (ciclos por segunda) con esto se logra calentar 1a
pieza hasta arriba del limite de transformacion para una profundidad determina-
fa, La pieza después es remplada en aceite 0 en agua, pero también puede usarse
Salmuera cdustica o aire. El endurecimiento por induecion es particularmente
propiado para piezas que requieran un endurecimiento localizado o de wn con-
trol de la dureza a determinada profundidad y resulta asimismo muy adecuado
para piezas de forma irregular, tales como levas, dientes de engrane o flechas que
fequieran un endurecimiento de superficie uniforme alrededor de sus contornos:
El método se aplica sobre todo para aceros al carbon de 0.35-0.55%. Los hierros
vaciados y maleables pueden tambien con este méodo tener endurecimiento en su
superficie.
Las ventajas del endurecimiento por induccion son: (1) ciclo de calentamien-
to y templado cortos, (2) ausencia de la tendencia a produeir oxidacion o decar
burizacion, (3) control del area y profundidad dei endurecimiento, (4) regula-
cidn cerrada del grado de dureza, (5) minimo alabeo y distorsién y (6) la posibili-
ddad de reemplazar acero de aleacion de costo elevado con aceros al carbon. En la
Fig. 2-17 se muestra cdmo puede ser controlada ia profundidad del endurecimien-
toen el diente de un engrane.
Enfriamiento controlado. Es un término usado para describir un proceso me
dliante el cual una pieza de acero es enfriada desde una temperatura elevada. Por lo
igeneral, ot enfrlamiento es desde el final dela operacion de formado en caliente y es
Propiedades metalrgicas de materiales de ingeniera 63
Fg 217 Sern on en praesent ene pont, Cs
Tiers es alors de as duane préximes aa suparfisyos qe est coca ce cart
ORES TUR ence moor inan on rel foan aslo een
son Reckwel ©. {Conese da Tocto Dh, Pak Ono Industries!
realizado en una forma predeterminada para eitarendretimientoo agtetamiento
‘icles. (1) Esa pare interior de un acero ol ual después del endurecimiento
de a caberta, 5 sustancilmente mis suave que ls capa perils o que ack
Dieta (¥daseendureinieno supertiia trina nile ambien sel usa para
designar la parte central relativamente mas suave de siertas heramientas de acto
endures
Glanorizcin, Veaseendursimieno superficial
Destarburiain. Es Ta peda de carbon dea superficie de un acero debidoal
calemamento en una amosfera (por eemplo, drogen, oxgen0) que reacciona
cone! carn, Esta tsdila puede ceurtr durante el ratamient tric, (a lamina
Sion en calene oe forjado, La devcarburiacion puede prjoicar de dos manetas,
la primera, esque nose puede logar obtener la Gureza maxima mediante un wat
miento ernie. La segunda, de mayor impotancia ex que un acero con superficie
Secarbuzad ene propedadco muy pobre de essen la fatga 9 fstmente
povién devarollarse gets sobre so super.
Ta fuente mayor de deserburizacion del acto ocurre durante su proceso de
Iabricacin on os molincs, Para corgi sa defconi, en mashas fbrens de 22
64. Disafo de miquinas—teara y préctica
ro stministran barras carburizadas com las cuales se restaura el carbon superficial,
testo como una parte del proceso final. Este remedio puede también ser adoptado por
tlconsumidor. Algunas veces ‘la cascarilla” es eliminada por medio de un esmerila-
ddo, pero un subsecuente tratamiento térmico puede de nuevo causar desearburiza-
‘ign'a menos que el tratamiento sea realizado en una atmésfera controlada no oxi
dante. Ademas, los efectos del esmerilado pueden ser también nocivos para aceros
sujetos a fatiga, sin embargo, ya se han citado algunas mejorias. Por ejemplo, los re-
sortes de hoja de automéviles que conservando superficie descarburizada fallan
‘cuando estan sujetos a cargas repetidas entre 50 000 y 75 000 Ib/plg?, dependiendo
del acabado de [a superficie, Por otra parte, resortes que han estado con stperficies
muy desearburizadas, después de un cuidadoso pulido han resistido esfuerzos repeti-
dos de 125 000 th/nlg® nor tiempo indefinido (61. Esta misma referencia cita un es-
fuerzo de fatiga a torsion por valor de 30 000 Ib/plg? y de 115 000 Ib/plg* cuando se
hha eliminado la capa descarburizada,
‘Regulacién del temple por recalentamiento.* Es sindnimo de revenido,** siendo
ésta la terminologia preferida, También puede confundirsele con ei estirado de un
metal a través de un dado. Por tanto, se prefiere el término revenido para evitar con-
fusiones.
‘Endurecimiento por flama, Es un proceso de endurecimiento superficial (véase
endurecimiento superficial)
‘Grafitizacién. Es un proceso de recocido aplicado a algunas aleacion¢s de hie-
rro-base, tales como hierro vaciado y algunos aceros de alto contenido de carbon y
silieio en el cual el carbén completa 0 parcialmente se precipita de la soluci6n en nd-
dulos esféricos como carbon libre o grafitico a esto también se le llama carbon de
temple.
'Homogeneizacién. Es un proceso de tratamiento térmico con el que se intent
liminar 0 disminuir por difusion la segregacion guimica.
Maleabilizacién. Es un proceso de recocido de la fundicion blanca en el cual el
carbon combinado es completa o parcialmente transformado a grafito o carbon
libre. En algunos casos el carbon es por completo eliminado,
‘Martemper. Es un proceso de endurecimiento donde el acero es templado en un
bao de sales fundidas a temperaturas justamente arriba de la cual la martensita em-
pieza a formarse. Se mantiene a esta temperatura hasta que ocurre la igualacién de
temperatura en toda la pieza, después de lo cual es enfriada por aire.
Nitruracin, Es un proceso de endurecimiento superficial (véase endurecimiento
superficial).
Normalizacién, Es un proceso de ablandamiento en el cual el acero es calentado
hasta aproximadamente 100 °F arriba de la temperatura critica superior y después se
fe deja enfriar en aire tranquilo hasta la temperatura ambiente. Con este procedi-
‘miento se pretende producir acero a una condicién uniforme no esforzada, de grano
dde tama pequetto y refinamiento que permita responder en formaadecuada a los
siguientes tratamientos térmicos. La normalizacion es particularmente importante
para aceros forjados que van a recibir tratamientos vérmicos. Dependiendo de la
Em ingles ex “drawing”. (N. del T)
En ings es “tempering”. (N-det
Propiedades metalirgicas de materiales de ingenieria 65
composicién del material, la normalizacién podra 0 no dejar al acero lo suficiente-
mente suave para que sea maquinado con las herramientas disponibies. Algunas ve~
ces, un cecocido para maquinabilidad es preferido por una normalizacion. Este tra
tamiento combinado frecuentemente llamado recocido doble, produce un resultado
muy superior al de recocido simple.
Sobrecalentado. Un metal es sobrecalentado si ha sido expuesto indebidamente
fauna temperatura elevada y desarrolla un grano grueso indeseable pero no dafino.
La estructura del grano puede corregirse mediante un tratamiento térmico adecuado
© por trabajo mecénico o por una combinacién de ambos. En este aspecto esto es di-
ferente de un metal quemado.
Precalentamiento. (1) Es un tratamiento usado para describir un calentamiento
preliminar para después efectuar un tratamiento térmico (por ejemplo, soldadura) 0
mecanico. (2) Si se aplica a aceros de herramienta, el termino prevalentaniento
describe un proceso en el cual el acero es calentado lenta y uniformemente por abajo
de la temperatura de endurecimiento para después ser transferido a un horno donde
fa temperatura sustanciaimente est& arriba de la temperatura d= precalentamiento.
Endurecimiento por precipitacién. Es un proceso de endurecimiento de una alea-
cién en el cual precipita el constituyente de una solucion supersaturada, Véase tam-
bign envejecimiento,
“Templado. Es un enfriamiento rapido de un metal que esta @ temperatura eleva
da mediante el rociado de un medio adecuado para efectuar el remplado hasta el
sncremento de dureza propuesta, (Véase también austemper y martemper.) Si solo
ciertas partes de la pieza van a ser endurecidas, entonces debe usarse un templado di-
ferencial.
Esferoidizacion. Es un proceso de calentamiento o enftiamiento que produce un
carburo de forma globular o estérico. La esferoidizacion para aceros de bajo carbon
se efectia con objeto de obtener ciertos requisitos de resistencia antes de tn subse-
Ccuente tratamiento térmico, Los aceros de alto carbon son esferoidizados para mejo~
rar la maquinabilidad, especialmente en operacién de cortado continuo, tales como
en tomnos y en maquinas para haver coscas. Los aceros de herramienta también
pueden ser esferoidizados. Esto se hace calentandolo hasta una temperatura ligera-
‘mente superior a la temperatura critica manteniéndoto en esta temperatura mediante
tun periodo de tiempo y después se le deja enfriar en ei horno. La esferoidizacién
tiende también a mejorar la resistencia @ la abrasion y esto es deseable cuando el ma-
terial va‘a ser fuertemente trabajado en frio (por ejemplo, extrusion, Flexion, estira
do 0 acortado)
Relevacidn de esfuerzos. Es un tratamiento térmico diseftado para relevado de
esfuerzos residuales internos inducidos por trabajado en frio, maquinado, soldado,
vaciado, normalizado 0 templado. La relevacion de esfuerzos es un recocide
subcritico, donde el acero es calentado hasta una temperatura abajo de Ac, perma
hhece a esta temperatura de 1 a3 h, La pieza despues se deja enfriar poco a poco en
aire, Esto ¢s particularmente efectivo para evitar la distorsion después de las opera:
ciones del maquinado.
'Revenido. Es un proceso de recalentamiento de un acero endurecido o normali
zado hasta una temperatura inferior a la del limite de temperatura de transforma
ion seguido por un enfriamiento a cierta velocidad deseada,
85 Disefo de miquinas— teoria y prbctce
Gama de transformacién, Para aleaciones ferrosas, es la gama de transforma
ion dentro de la cual se forma austenita con calentamiento 0 desaparece con en-
friamiento.
SECCION 210
Términos metaliirgicos suplementarios
La siguiente terminologia, alguna de la cual ya ha sido previamente mencionada en:
‘este texto, se lista en forma separada de la Sec, 2-9 que define términos referentes al
tratamiento térmico, se hace de ésta manera porgue los términos listados estricta-
mente 0 pueden ser clasificados en la nomenclatura de tratamiento térmico.
“Aleacion. Es un material de ciertas propiedades metalicas que consiste de dos 0
mas elementos, uno de los cuales es el metal base.
Elementos de aleacién. Es un elemento o varios elementos deliberadamente
agregados al metal con el objeto de alterar las propiedades mecénicas o fisicas del
metal.
‘Anisotropia. Es la caracteristica de un material el cual manifiesta diferentes va-
tores de una propiedad en direcciones diferentes con respecto a un conjunto de ejes
de referencia. Por ejemplo, valores de la propiedad ““con el grano”” como compara
do con el valor de la misma propiedad “transversal al grano””
‘Quebradizo en frio. Es la fragilidad que tienen algunos metales a temperaturas
menores @ su temperatura de recristaizacién.
Capacidad de amortiguamiento. Es Ia habilidad det metal para disipar la energia
vibratoria 0 de esfuerzos ciclicos por medio de friccion interna. Algunos materiales
tales como el plomo poseen una gran capacidad de amortiguamiemto. El hierro va-
ciado tiene una buena caracteristica de amortiguamiento, sin embargo, el acero tiene
caracteristicas pobres de amortiguamiento.
‘Quebradizo, Quebradizo es la pérdida de ductilidad de un metal, esta pérdida
puede ser causada por cambios fisicos 0 quimicos,
‘Deseascaramiento. Después de haber sido trabajado el acero en caliente se pro-
ducen esfuerzos causados por transformacion local y solubilidad por la reduccion de
hidrégeno mientras que el enfriamiento produce microgrietas internas y fracturas por
‘descascaramiento”. Este fendmeno adverso es conocido como descascaramiento ¥
puede ser corregido mediante un ciclo de enfriamiento por lo menos hasta los 600 °F
antes del enfriamiento en aire
Homogeneidad. Se dice que un material es homogéneo cuando tiene las mismas
propiedades en toda su extension. Por ejemplo, el acero con sus cristales de diferen-
tes tamatos y material en los limites del grano, no es material homogéneo.
Deseascaramiento debido al hidrogeno. Es la baja ductlidad de un metal causa-
do por la absorcién del hidrogeno,
Tsotropia, Se dice que un materiales sotrdpico cuando tiene propiedades idénti-
«as en todas las direcciones.
‘Acero calmado. Es un acero que ha sido desoxidado con un fuerte agente deso-
xidante tal como silicio o aluminio. Tal oxidacion reduce el contenido de oxigeno
libre hasta el punto donde ei carbin av pueda oxidarse a medida que se solidifica el
Propiedades metalirgcas de materivies de ingenieria 87
‘acero, El acero calmado tiene poco gas en sus cavidades, esta caracteristica ayuda
para un mejor forjado y rolado de secciones.
‘Quebradizo al calor. Esta fragilidad de un acero y la tendencia al agrietamiento
‘a temperaturas altas causado por la formacién de sulfuro de hierro.
"Acero encerrado. Es el caso de acero de bajo carbon que no ha sido completa-
mente desoxidado. El lingote se solidifica con superficie externa compacta (0 sea, la
parte mas externa), pero el nicleo contiene burbujas las cuales sern eliminadas en el
subsecuente rolado y formado de tiras de acero.
‘Acero semicalmado. Es un acero que habiendo estado parcialmente desoxidado
aiin contiene suficiente oxigeno para reducir la contraccion en el fingote por 1a for
‘macién de mondxido de carbono.
Fragilldad del temple. Es la fragilidad resultante por permanecer ciertos aceros
dentio de una temperatura paricular abajo de Ia del mite de transformacion 0 por
tun enfriamiento lento a traves de dicho limite. La fragilidad se presenta a temperatu-
12 ambiente 0 menor
SECCION 2.411
Elementos de aleacion en el acero y sus funciones'
Un elemento de aleacion es deliberadamente agregado al metal para alterar sus propie-
dades fisicas 0 mecinicas. El acero al carbon contiene cantidades que no son suficien-
tes para alterar el efecto basico del carbon. Por tanto, se le agregan varios elementos
ide aleacion de acero al carbon en cantidades més o menos grandes para producir uno
fo mis de jos siguientes efectos: (1) aumencar la resistencia, (2) mejorar la templabili-
dad, ® mejorar las propiedades a baja o alta temperatura, (4) mejorar la resistencia la
corrosin, (5) mejorar la maquinabilidad y (6) mejorar la resistencia al desgaste.
La Tabla 2-1, obtenida del Merals Handbook edicion 1948 Ref. (4] es un cesu-
men de efectos de los principales elementas de aleacién para el acero. Ademas de ios
‘lementos indicados en la tabla se agregan otros cinco elementos a algunas aleacio-
hes para mejorar determinadas propiedades en particular. Estos son cobre, boro,
lomo, telurio y azufre.
‘Cobre, Es un elemento usado principalmente como agente de aleacion para me-
jorar la resistencia a la corrosion del acero cuando est@ expuesto a fa atmosfera. La
‘icin del cobre mejora también la fuidez del acero en la colada. Por lo general, se
agrega en cantidades de 0.10 a 0.40%. Cuando se agrega el cobre en mas de 0.75%,
el acero puede endurecerse por precipitacién.
Boro, Es un elemento no metalico, que cuando se agrega al acero en cantidad
que no exceda a 0.003% resulta muy eficaz porque hace que se aumente la termplabi-
Tidad de acero de bajo y medio carban. El boro no tiene efecto sobre la resistencia
del acero a la tensi6n.
Plomo. El agregar plomo al acero no forma aleacion. Mejora la maquinabili-
dad, el plomo no tiene ningiin efecto sobre las propiedades mecanicas del acero. Las
propiedades de autolubricacion del plomo, reducen la friceion en las herramientas
No confundir exe termina con duteza (véas a Sex, 28)
VE9SITARIA
ATAGENA
58. Diseio de miquinas—teora y préctica
so1osyo 6
r
ing A 07800 ju UgFee ap SOAUELIOL] LZ BIAEL
70. Diseio de méquinas—teorta y practice
decorte, por lo que mejora la maquinabilidad. La cantidad de plomo depende de ea:
dda acero en particular y varia de 0.15 2 0.35%.
Telurio. Cuando este elemento ¢s agregado a un acero con plomo produce mejo~
ramiento en la maquinabilidad del acero, E] aumento de telurio depende det conteni-
do de plomo y varia de 0.03 a 0.05%.
Azufre. Es no metal, se considera indeseable tener impurezas de azufre en el
cero por Ia formacion de sulfuro de hierro, el cual puede ocasionar agrietamientos.
‘Sin embargo, en la presencia de una cantidad apropiada de manganeso, éste forma
sulfuro de manganeso, ef cual mejora la maquinabilidad del acero. El contenido de
azufre puede variar entre 0.06 y 0.30%.
SECCION 212
Clasificacion de los aceros
Las categorias de los aceros son: (1) acero al carbén, (2) acero de aleacion baja, re-
sistencia aita, (3) acero estructural de baja aleacion, (4) acero vaciado, (5) acero ino~
idable, (6) acero para herramienta y (7) acero para algtin fin especial
Acero al carbon
El acero al carbén esta dividido en tres grupos. (1) Acero de bajo carbon, tiene con-
tenido de carbin entre 0.05 y 0.30%. (2) Acero de carbon medio, tiene contenido de
carbon entre 0.30 y 0.50%. (3) Acero de alto carbén, tiene arriba de 0.50% de carbon.
‘Acero de bajo earbén, Se le usa en una gran variedad de productos industriales
y también en la industria dela construction. Tipicamente se le usa en tuberias, cons-
trucciones, tanques de almacenamiento, carros de ferrocarril, armazones de auto-
moviles, tuercas, tornillos, carrocerias de automoviles, laminas de acero y galvaniza-
dda. Cuando este acero tiene un alto contenido de azufre se le llama acero de tallada
Teil y se le usa muy extensamence en maquinas de fabricar tornillos. En muchas
aplicaciones industriales se usa este tipo de acero ya sea rolado en caliente o en frio,
El rolado en frio mejora la resistencia det acero, la maquinabilidad y es mas acx
sible a tenerlo en almacenes por su dimensionamiento. Cuando se requiera de super-
ficies resistentes al desgaste, este acero puede recibir endurecimiento superficial
"Acero de medio carbén, puede ser templado y revenido por los métodos de tra-
tamiento convencionales. Por tanto, pueden usarse en aplicaciones que requieran
gran resistencia al desgaste. Como productos tipicos que sean Fabricados con acero
de contenido medio de carbén son forjados, vaciados, ejes, flechas, ciguefales,
bielas y cualquier parte maquinada que requiera una resistencia superior a la que
pueda obtenerse con un acero de bajo carbon.
‘Acero de alto carbén. Se le usa en donde un producto deba tener resistencia al-
ta, dureza y buena resistencia al desgaste, Es obvio que este acero debe ser tratado
térmicameate para lograr las propiedades deseadas. Con frecuencia, se le compra en
la condicion de recocido y el producto acabado ¢s tratado térmicamente para darle
la dureza adecuada, Los aceros de alto carbon se usan en forjados y en una amplia
variedad de herramienta, tales como barrenas, macho de tarraja o de roscar, rimas,
dados y hertamientas de mao. Se le usa también para fabricacion de productos que
Propiedades metalirgicas de materiales de ingenieria 71
requieran tener esquinas cortantes (por ejemplo, cuchilleria, buriles, cuchillas de
corte, herramientas de cepillo, etc), para alambre de resorte y para alambre de
cable.
El uso del acero de alto carbon deber ser cuidadosamente considerado debido @
las pérdidas de resistencia y dureza que experimenta a temperaturas elevadas. Estas
son caracteristicas indeseables para ciertas herramientas de corte y para operaciones
de formado en caliente. Ademas, cuando este acero es templado, queda muy pro-
penso a distorsion, alabeo y agrietamiento. Por iitimo, el acero de alto carbon tiene
Ta desventaja de poca profundidad, de endurecimiento que no seria inconveniente
si la pieza es relativamente delgada. Hasta este punto, no se ha obtenido un benefi-
completo del tracamiento térmico para acero de alto carbon.
Acero d
aci6n baja, de resistencia alta
Ei acero de aleacién baja y de resistencia alta es usado en la condicion de "‘asi como
esta” otras condiciones son recocido y normalizado o se trata térmicamente para de~
sarrollar y mejorar sus propiedades mecanicas. Para ser usado ‘*asi como esta”, los,
tlementos de aleacion se agregaron principalmente para fortalecer {a ferrita, para la
cual las propiedades mecanicas no estan por completo desarrolladas. Cuando el ace~
ro de baja aleacion y resistencia alta se le sujeta a varios tratamientos érmicos se
mejoran propiedades tales como resistencia, dureza-profundidad, ductiidad, rena-
cidad, etc.
Acero estructural de aleacién baja
Ej acero estructural de aleacién baja fue desarrollado principalmente para usarse en
Jas areas de transporte y construcci6n. Si a este acero no se le aplica algin tratamien-
to térmico, gran parte de las propiedades deseadas dependerin de la mezcla ade~
ccuada de Ios elementos de aleacion y del contenido de carbon. Un acero estructural
tipico de aleacion baja tiene resistencia de cedencia de aproximadamente 50 000
Ib/plg? y esfuerzo iiltimo a tension de 70 000 Ib/plg. Este acero es facilmente sol-
dable y no se endurece en el aire. Para tener un acero de resistencia alta, el contenido
de carbén debe de aumentarse hasta cerca de 0.30%. Sin embargo, la resistencia alta
se logra en las expensas de la ductilidad, formabilidad y soldabilidad.
Acero vaciado
El acero vaciado tiene composicion quimica parecida @ la del acero forjado excepto
por las cantidades grandes de silicio y manganeso como agentes desoxidantes y des-
gasificantes, Estos agregados se ponen cuando el acero esta vacidndose en el mole.
Con acero vaciado se Fabrican coniponentes muy complicados con propiedades me:
canicas muy parecidas a las del acero forjado a un costo menor que el de los otros
métodos de Fabricacién. Aunque los aceros vaciados tienen propiedades mecinicas
superiores a las del hierro vaciado, éstas resultan ser inferiores a las de composi
ciones de acero forjado equivalente. Sin embargo, pueden emplearse procedimientos
de tratamiento térmico estindar para ajuste de las propiedades mecanicas a fin de
satisfacer los requisitos especiticados.
72. Diseio de mdquinas—teore y prictca
Debido a que las propiedades mecdnicas del acero vaciado son similares alas del
acero forjado, el acero vaciado, puede salvo pocas excepciones ser usado para las
‘hismas aplicaciones. Por tanto, se encuentran vaciados de acero usados en equipo
de ferrocarril, molinos de laminacion, maquinacia de mineria, maquinaria eléctrica,
equipo-automotor, equipe marino, maquinas herramientas, etc
‘Be tienen 3 clases de vaciados para aceros comerciales. Estas son: (1) acero de
bajo carbin donde ef contenido de carbén es menor 0.2%, (2) acero de medio car-
‘bon conteniendo de 0.20 hasta 0.50% de carbon, (3) acero de alto carbon, con con-
tenico de carbén arriba de 0.50%, (8) acero de baja aleacidn, con contenido total de
aleacion de 8% y (8) acero de alta aleacion, con un contenido total de aleacion mayor
a1 8%. Los vaciados de acero de aleacion son composiciones parecidas a las del ace-
To forjado, inoxidabies constituyen un grupo que son del tipo resistentes al calor 0
esistentes a la corrosion. Con mucha diferencia, el mayor nlimero de vaciados de
[cero producidos son de acero al medio carbén. Las clasficaciones de acero de bajo
y alto carbon son consideradas especiales porque muchas de éstas son formuladas
para productos y aplicaciones particulares
‘Casi todos los vaciados de acero son efectuados con base en las especificaciones
de ia ASTM, que virtualmente cubren todas las clases y tipos de vaciado de acero.
En la Tabla A-l del Apéndice A, se lstan las propiedades mecinicas de vaciado de
cero al carbén, Los grados de resistencia menores tales como clase 60 000 y 70 000
stan espesificados por la ASTM A27-58. Los aceros vaciados de resistencia alta, ta-
Jes como clase 80 000, 85 000, etc, estan especificados por la ASTM A148-S8.
Acero inoxidable
Se tienen tres tipos de acero inoxidable: (1) austenitico, (2) ferritico y (3) martensiti-
co. Todos estos aceros poseen un diferente grado de propiedades resistentes @ la
corrosion, dependiendo principalmente dei contenido de cromo. El acero inoxi-
able, en particular el tipo austenitic, su acabado es pulido y de gran lustre. Como
resultado de esto tiene muchos usos decorativos, por ejemplo, en arquitectura. Ade-
nas los aceros inoxidables son tambien muy usados para aplicaciones expuestas al
calor.
El tipo de acero inoxidable esta especificado por un sistema de numeracion de la
AIST, La SAE emplea el mismo sistema excepto que antepone dos niimeros adi-
Glonaies, El sistema de numeracion de la AISI emplea tres digitos: el primera identi-
fica la serie particular de acero inoxidabley ls ltimos dos sirven para identificar al
cero, Cualesquier letras sufijas después de los tres digitos representan una modifi-
acion en esas series. En la siguiente tabla se muestran las designaciones de la series
‘Acero inoxidable austenitico, Es del grupo cromo-niquel y es conocido como de
1a serie 300. El grupo cromo-niquel-manganeso pertenece a los tipos 201 y 202, fue
ddesarrollado durante la Segunda Guerra Mundial como consecuencia de la escasez
ide niguel, Se uso el manganeso como sustituto del niquel. El acero inoxidable que se
‘rodujo tuvo un éxito comparable alos tipos 301 y 302 excepto por su habilidad lige
Famente reducida para resisti la corrosion quimica. Debido al uso continuado de los
tipos 201 y 202 estos fueron agregados a Ia lista “regular”” de designaciones AISE.
"La serie 300 generalmente es superior en resistencia a la corrosion de los aceros
inoxidables tipos martensitico y fertitico. De todos los aceros inoxidables éstos po~
Propiedades metalirgicas de materiales de ingenieria 72
_—_
—_—__rrrersssereorscw“t ——
seen la mas alta resistencia a la formacion de costra superficial y las mejores
caracteristicas de resistencia a temperatura alta. El ripo 302 constituye el tipo basico
tn esta serie y con frecuencia se ie llama acero inoxidabie 18-8." Este ¢s el “eaballito
de batalla” de [a serie 300 y se le usa ampliamente en procesamientos de alimentos y
maquinaria manual, equipo de cocina, arreglos arquitectonicos, plantas lecheras, al~
gunas maquinarias textiles, etc.
El campo mas importante de aplicacion de los aceros inoxidables es la ingenieria
nuclear. Los aceros inoxidables se usan como revestimiento metalico en depositos de
combustible, recipientes nucleares, sistemas de tuberias, valvulas, accesorios, etc.
Estos se usan basvance en el campo nuclear porque mantienen minimo peligro por
radiacin, tienen resistencia alta a la corrosién y caracteristicas razonablemente bue-
nas de fabricacin, buenas propiedades de ductilidad en frio y en caliente (o sea que,
térmicamente son resistentes a choques), tienen buenas capturas de neutrones en su
secein transversal” y se les puede obtener a coste razonable. Los tipos mas comu:
nes de aceros inoxidabies son los Nims. 304, 316, 346 y 347
[Los aceros austeniticos no son templables por enfriamiento pero responden fé:
cilmente a trabajo en Trio, seguido por un recocido rapido para un trabajo en frio se
‘vero. Los aceros austeniticos son dificiles de maquinar debido al endurecimiento, ¢
‘cero de la referencia BIL12 tiene $O% de capacidad de maquinabilidad. El acero de
ia serie 300 es muy dactil, pero debido a su tendencia de endurecimiento al trabajar
sele, éste no posee las propiedades deseadas de formabilidad.
Los aceras inoxidables austeniticos son facilmente forjables y soldables por los
métodos de fusion. Las soldaduras mejores se obtienen cuando las juntas a soldarse
estan protegidas de la atmosfera durance la soldadura. También, los aceros al‘cro»
mo-niquel tienen bajos coeficientes de conductividad térmica y alto coeficiente de
expansion térmica, dando como resultado que se tenga distorsin durante el enftia:
miento. Por lo mismo, debe diseBarse una piantilla adecuada y usar barras de en-
friamiento para evitar la distorsiOn y alabeo. Para los demas grados de la serie 300 se
requiere de recocido después de la soldadura.
‘Acero inoxidable ferritieo (parte de la serie 400), no es templable por tratamien
to térmico y por lo mismo no se endurece a un grado apreciable en el trabajo, Siendo
FF igunosottos pos 300 de acerosinoxidabls son ambien conociéos como 18-8 pero son segudos Por
tera uj, Por semplo tipo 305 es ambien conocdo como [83F5, Se han hecho estueros pra so
tar lor numeroe ipo, a inde evtarconfusones
@ Ee un trina wad para indicat (a probabiidad de
74 Diseio de méiquinas—teora y préctca
actl, este acero se puede facilmente estar, formarse, acuarse o doblarse, Traba-
jndoto en frio se incrementa en un 30% su resistencia a la cedencia con un pequeio
jncremento en la resistencia ultima. Los aceros fecrticos son faciimente forjables 0
rolables, pero su maquinabilidad es pobre y requiere que siempre estén afiladas las
herramientas de corte,
Este acero puede soldarse por arco o resistencia pero debe recocerse después
fin de evitar la fragilidad y para mejorar su tenacidad. Los tipos més resistentes de
soldadura son obtenidos con electrodos de soldadura austenitica. A temperaturas
clevadas, el acero ferritico tiene propiedades pobres de tenacidad a la muesca, pro-
piedades bajas al destizamiento y baja resistencia a la ruptura.
Martensitiea es el tercer tipo de acero inoxidable. Al igual que para el tipo
fervitico, el acero martensitico pertenece al grupo cromo-hierro y forma parte de la
setie 400. El acero inoxidable martensitico bisico es el tipo 410 que es el mas caro de
Jos de este tipo. Este acero tiene buenas propiedades al impacto y es templable,
templandoto en aceite a 1800 °F, seguido por un revenido.
Las aplicaciones de los aceros martensiticos tipo 400 son muy variadas. Por
ejemplo, el 410 es usado en valvulas cribadoras, ejes de bombas, cuchillerias, tor
rill, cuereas y varias piezas usadas en las industrias quimica y del petréleo. El tipo
403 se usa para hacer las alabes de las turbinas de vapor, alabes de compresoras de
rmaquinas de propulsion y en general, partes en las que se tienen esfuerzos muy ele-
‘vados. El tipo 416 se le usa en la Fabricacion de partes de carburadores, asientos de
valvulas, Mechas, earretes de pesca y clubes de golf. El tipo 420, después del trata-
miento téctmico, tiene dureaa muy alta y se usa en la fabricacion de cuchilleria, ins-
‘rumentos quirirgicos, etc. El tipo 440C, debido a su buena resistencia al desgaste,
se le usa en la fabricacibn de baleros de bola, casquillos, partes de valvula, asientos
de valvula y cuchilleria més fina.
Los que tienen alto grado de carbon, sélo pueden maquinarse a velocidades y
alimentaciones de corte bajas. De estos tipos de acero, los adecuados para formacion,
‘en frio estan limitados en forma principal al 403 y 410. Todos los tipos martensiti-
0 son facilmente forjables en caliente y rolabes a temperaturas entre 1900 y 2250 °F.
La soldadura por arco y resistencia de los aceros inoxidables martensiticos
quedan restringidos alos tipos 403, 410 y 416, Para soldaduras satisfactorias (o sea,
que no se tenga fragilidad o agrietamiento) las piezas deberén precalentarse entre
130 y 300°F y enfriadas con aire de temperatura entre 1200 y 1350 °F después de sol-
dadas.
El acero inoxidable martensitico tiene excelente resistencia de ruptura por desti-
zamiento hasta 1000 °F,
Los tres tipos de acero inoxidable pueden soldarse con soldadura suave y fuerte.
La soldadura suave (0 sea, usando como material de relleno mezclas de estafo-plo-
mo) no presentan ningiin problema, ya que se realizan a temperaturas relativamente
bajas y no producen carbuiros indeseables. La soldadura fuerte mas propiemente lla-
mada soldadura de plata y/o plata laton se realiza a temperatura elevada (minima
1145 °F), Esta puede producir carburos indeseabies en los aceros inoxidables tipo
austenitico, Por tanto, es preferible usar grados de acero de bajo carbén o estabili-
zarlos cuando se requiera tener soldadura fuerte. Tambien es posible usar asero ino~
Propiedades metalirgicas de matersles de ingenieria 75
xidable al cobre laton, pero este método requiere cobre de alta pureza y una atmos-
fera que lo proteja mientras se realiza la soldadura. Se requieren temperaturas de
alrededor de 2000 °F y debe considerarse cuidadosamente el efecto sobre cualquier
tratamiento previo. Este método de union esta cestringido solo a piezas relativamen:
te pequenias.
Hay una clase de acero inoxidable llamado acero inoxidable de endurecimiento
por precipitacion, que es una raodificacién del acero austenitico tipo 18-8. Este ace-
Fo posee propiedades resistentes a la corrosion muy parecidas a las del acero inoxi-
able austenitico, pero puede ser endurecido a temperaturas relativamente bajas
hasta una resistencia de cedencia alta sin que se tenga distorsion 0 formacion de
costra, Este acero posee una resistencia por relaciones de pesos muy parecidos a las
del aluminio, magnesio y titanio.
El endurecimiento de este acero se obtiene: (1) por la transformacibu de la 8us-
tenita a martensita por tratamiento térmico 0 por trabajo en frio y (2) por precipita
con del carbon y temperatura baja de envejecimiento, lo cual reviene a la mastensi-
ta, Los tipos que responden a un traramiento térmico son los de grado martensitic
Estos incluyen al 17-4PH, 15-3PH y PhI3-8Mo, los cuales son productos de te
‘Armco Steel Corporation; e! AM362, el cual esta hecho por Allegheny Ludlum Steel
Corporation y el Custom 455, que es un producto de la Carpenter Stee! Corpora-
tion, El segundo tipo esta clasificado como de grado semiaustenitico ¢ incluye al 17-
TPH, PHIS-7Mo, Phi4-8Mo (productos Armco) y el Am350 y Am33S (productos
de la Allegheny Ludlum). Estos tipos son austeniticos cuando son tratados como so:
lucida y fa ductilidad resultanse permiten que sean trabajados en forma similar a
acero inoxidable 18-8. Para piezas que no requieran buena ductlidad, la austenite
puede transformarse a martensita mediante trabajo en frio y envejecimiento a baja
temperatura, lo cual es realizado después de la Fabricacion. Con estos tratamientos
se puede obtener una resistencia diltima de valor hasta 300 000 tb/pig*
‘Los grados semiausteniticos son mejores para formacion en frio, mientras que
los grados martensiticos son mejores para forjados. Todos los grados se maquinan
con la misma dificultad que para el acero inoxidable, de modo que las velocidades 7
‘limentaciones son relativamente bajas y las herramientas de corte deben estar bien
afiladas. Debido a que estos aceros son endurecidos por precipitacion, no s€ ob
tienen problemas de soldadura como con otros aceros inoxidables.
En la Tabla A-6 en el Apéndice A, se tienen las propiedades de algunos aceros
inoxidables forjables representatives. También véase la Tabla A-1 en el Apéndice A
para propiedades de algunos aceros inoxidables vaciados,
‘Acero para herramientas
Las composiciones quimicas del acero para herramientas hacen posible efectuar tra-
tamiento térmico para product las caracteristicas esenciales de as herramientas €or
tantes, herramientas trasquilantes, dados formadores, perforadoras, punzonadoras,
‘marcadoras, etc. No se recomienda usar este acero para la fabricacién de herramier-
{as manuales, pero algunas veces se le usa para construir componentes de maquinas,
lo cual puede ser ventajoso dadas las propiedades mecanicas que posee.
En el sentido mas amplio, el acero de herramienta debe satisfacer los siguientes
requisttos: (1) La habilldad para retenet su dureza y resistencia a temperaturas elevac
|
76 Disefo de miquinas—teora y prictca
‘das causadas por el maquinado (o sea, “
sianacones dos aceros de herrumiena, la mavor pate de [os cules sn identfeados por la casi:
Som AISI
Propiedades metalirgicas de materiales de ingenieria 77
recidos en aceite aunque son mas caros, no estén sujetos a la dureza por calor o al
alabeo después del templado,
Acero especial
Se podra necesitar de un acero especial cuando por requisitos del disefio se necesite
lun material de propiedades especiales. Algunas veces es necesario un acero especial
para aplicaciones de alta 0 baja temperaturas, pocas veces se pide para alta resisten-
Servicio para temperatura elevada, Para equipos de planta de fuerza, turbinas de
gas, motores a chorro, refinerias petroleras, plantas quimicas, etc., todas tienen
Componentes que raniieren aceros para resistir la oxidacién y tener buenas pro-
piedades al deslizamiento (véase la See. 3-31) para servicio de temperatura clevada.
‘Ademas, tales aceros no deben cambiar su estructura cristalina o sufrir fragilidad
bajo exposiciones largas a temperatura clevada. Algunos aceros inoxidables
‘usteniticos (por ejemplo, 302, 309, 310, 316, 321 y 327) se les usa para servicio con-
tinuo y para temperaturas entre 1700 y 2000 °F pero bajan su resistencia al desliza-
miento para temperaturas arriba de 1100 °F, Algunos aceros inoxidables
artensitivos y fecriticos (por ejemplo, 405, 410, 418, 430 y 446) pueden también ser
tisados para exposicién continua de temperaturas entre 1300 y 2000 °F. Sin embar-
120, son muy bajas sus resistencias al deslizamiento aun a 1000 °F y casi nada a tem
peraturas elevadas. Por tanto, éstos no pueden usarse donde la resistencia sea un
factor de disefio importante. El acero inoxidable tiene buena resistencia a Ia forma-
ign de cascarillas, Por ejemplo, el cipo 440 puede resistir a dichas formaciones para
Servieio continuo a temperatura de 1400 °F. Todos jos demas tipos pueden resistir
temperaturas mayores que 1400 °F.
‘Ademas de lo dicho anteriormente para el acero inoxidable, se han desarrollado
algunos aceros aleados expresamente para dar servicio a temperaturas elevadas, En
la Tabla A-13 en el Apéndice A se da una lista de tales aleaciones.
Condiciones ambientales de temperatura baja. Se ha aumentado la importancia
de algunas propiedades especiales para aceros que estan sujetos a condiciones am-
bientales de temperatura baja, procesamiento de alimentos, desparafinado del petré-
leo, licuacién de gases, fabricacion de hule sintético, polimerizacion de hidrocarbu-
108, aviacion a alturas elevadas, requerimientos militares, etc. Estos son solo unas
jpocas de las areas industriales que requieren el uso de aceros a temperaturas bajs.
El grupo de acero inoxidable austenitico tiene la clasificacion més extensa de
aceros can propiedades adecuadas para aplicaciones a temperatura baja. (Veuse ade-
mas la See. 2-18.) Debido a que las partes componentes de un sistema de temperatu-
ra baja pueden soldarse, la junta soldada debera tener una buena ductilidad y sensi-
bilidgd a la muesca. Generaimente, las soldaduras hechas con electrodos de acer
inoxidable austenitico cumplen con estos requisitos.
‘Acero de ultraalta resistencia, Hay un grupo de aceros conocido como aceros de
ultraalta resistencia. Estos ptieden desarrollar valores muy altos de resistencia de ce-
ddencia y éltima. En la Tabla 2-3 se da una lista de nueve categorias de aceros clasifi
adus como de ultraalta resistencia,
72 Diseto de méquinas—teora y préctics
‘Tabla 23 Resistencis tpieas 2 a tension
de aceros de resistencia itraalta
‘rps ce acwo | ratengn
‘a
Tones eteicin veaecrbon 70
‘rotoon nwoio a9 csiese 20) =
sSroe arenas Ey Be
‘uo on 0 » mm
tie move cy =
oucr oases 8
“coset eon as 26
AcwosceaneotnstayT 20 Ed
‘amore sewo so caten 50 eo
——_—_—_____—_____————
—_—_—_
SECCION 213,
Designaciones de la AISI-SAE para acero forjado
[Ei método mas ampliamente aceptado para especificar alos aceros, se basa en el sis=
tema de cuatro y cinco digitos de la SAE desarrollado a principios de este siglo. Con
paso del tiempo y la creacion de nuevas aleaciones la SAE y la AISI han de-
Sarrollado un sistema conocido como AISI-SAE el cual conserva los conceptos bas
‘os originales de la SAE. El sistema esta estructurado como sigue: el primer digito
{indica el tipo de acero (© sea, como al elemento principal de la aleacién) el segundo
texpecifica aproximadamente el porcentaje del elemento de la aleacion predominan-
te 9 los itimos dos (o tres) digitos indican el promedio de fos puntos dei carbon en
plavero donde un punto es equivalente a 0.01%. Cuando se usa el criterio de ta AISI
fos cuatro y cinco niimeros digitos son los mismos de las designaciones de la SAE,
excepto por las letras prefijo y sufijo. En la Tabla 2-4 se da la lista de las diferentes
designaciones y tipos asociados de acero.
‘Como ejemplo para conocer como trabaja el sistema, un acero AISE C1040
(GAE 1040) es un acero al carbon hecho por el proceso de horno a coraz6n abierto
‘conteniendo 40 puntos de carbon o 0.40% de carbon. Otro ejemplo AISI 4340 (SAE
44340) es un acero al “niquel-cromo molibdeno” con 1.83% de niquel en promedio,
(0.809% de cromo en promedio, 0.25% de molibdeno en promedio y 40 puntos 0 0.40,
de carbon.
Propiedades metalirgicas de materiales de ingeniera 79
“Tabla 2-4 Nimeros de designacién AISI-SAE para aceros foriedos.
ee
Degree F Tagen a
sae a SAE rea
10xx Al ean no oor ex Nout 30M Modena 025%
six Gamo 0.50%
110 Ate muni eu)
(Gor orp. ous fabrcacon de rls)
10 Acro erin a calor
120 Ate aqui reutraado tm
retotoaaeo!
12xK Manganese 160-1 50% S15 Acton itentn aca ya8coroion
eK Nau 3208 sex Come 0K
2 Nqwl 5% ox Cerne 7, seo 0135
SYK Novel 125%, e600 2X Niue 0, ar O50
ERK Now 995%, eromo O50
XX Niue OS, cromo 0.50%
‘roiocen 938%
30K Wav! 3.50%, come 10%
0K Neve 5%, coma 080% s2xK —Mangaaes 080%, so 2.00%
sx Nau 3.25%, cromo 1.20%
Se Aceon ian cry 818 comonion
xk Moen0025% 380. Manganese 095% 25%,
Nave 886%, cma 0.0%
‘rosea 0 125
o7ex Net, cro 0.17%
Pino 0205
4 ame 100% moiadono 0.20%
‘ralbdens 225% SOX Noe 00%, come 080%
smote 225%
so bigul175%, rolteno 25%
Las Tablas A-2 y A-3 enel Apendice A dan una lista de las propiedades mecani-
cas de varios aceros al carbén y aceros de aleacién en las condiciones de ‘estirado”,
“tolado” y las condiciones del tratamiento térmico, También en las Tablas A~t y AS
dei Apéndice A muestran respectivamente los efectos de diferentes temperaturas de
evenido y masas sobre las propiedades de algunos aceros al carbon y de aleacion
con tratamiento térmico.
0 Disefo de méquinas—tworia y prictica
SECCION 214
Aleaciones de aluminio forjado
Después del acero, el aluminio es el metal mas ampliamente usado y sus aplicaciones
son muy variadas, Se le consigue en todas sus formas tales como alambre, barras,
Gxirusiones {ineluyendo perfiles estructurales), polvo, laminas, placas, forjados y
aciados, El aluminio posee alta resistencia a casi todas las atmésferas corrosivas
porque facilmente forma una capa superficial de Oxido. Los diferentes elementos de
sieacion afectan la resistencia del alumminio a la corrosion en diferentes grados; sin
‘bargo, todas las aleaciones son esencialmente resistentes ala corrosion. Los aci-
tdos halgenos y los Alealis son dos de los pocos tipos de soluciones que atacan el alu-
‘hinio ya que estas sustancias pueden destruir la cubierta de oxido y exponer al alumi-
io. El aluminio tiene buenas caracteristicas de conductividad electrica y térmica, ast
Tomo también teflectividad alta. Puede Facilmente ser formado, estirado, estampa-
do, centrfugado, maquinado (excepto con temple *0"), soldado con arco, soldado
con laton, dependiendo del temple de la aleacion en particular
Como material estructural, puede desarrollar resistencias comparables @ las del
acero, Debido a que el médulo de elasticidad del aluminio es alrededor de la tercera
parte que la del acero, no es tan rigido y se deflexiona mas que el acero cuando esta
Sujeto a cargas comparables. Estas caracteristcas tambien pueden afectar la exacti-
fad del dimensionamiento durante el maquinado si se hace un corte grueso sin tener
tl aditamento adecuado para soportar la pieza de trabajo. Sin embargo, ¢! aluminio
tiene una relacion de alta resistencia-peso, lo cual puede ser una consideracion muy
importante en el diseRo, por ejemplo en aviacion, cohetes, ferrocarriles, etc. Debido
asa modulo elistico, las operaciones de formado en frio requieren que el aluminio
Sea doblado 0 formado a un tamao mayor que el de superficie final (comparativa-
mente mas que si e usara acero) por la tendencia que tiene de desdoblarse. De hecho
para asegurar el formado adecuado, e! aluminio debera ser deformado mas allé de
su punto de cedencia.
‘Elaluminio no tiene buena resistencia al desgaste y no puede usdrsele donde esta
caracreristica sea el parimetro principal de diseno. Ademas la resistencia a fatiga no
s muy alta para el aluminio, por lo que debera tenerse cuidado para aquellos casos
Gonde la vatiacidn de la carga sea un pardmetro importante para producir una deci-
sin on Fespecto a st Uso.
El coeficiente de expansi6n térmica del aluminjo ¢8 aproximadamente 1.5 veces
la del acero y el coeficiente de conductividad térmica del aluminio ¢s alrededor de 5
veces que el del acero. Estos dos factores requieren que tanto el maquinado como [a
Soldadura sean revisados con mucho cuidado. Al estar maquinando un aluminio,
fa energia del corte puede causar expansion en la pieza trabajada debido a su expan-
sion térmica alta. Esto puede dar como resultado una inexactitud en las dimensiones.
ara que este problema tenga minimo efecto, las herramientas de corte deberdn siem-
pre conservarse bien afiladas, las alimentaciones y velocidades deben ser moderadas
¥ debe utilizarse un buen enfriador
‘Se usa un sistema de cuatro digitos para designar ¢ identificar Jas aleaciones de
aluminio forjable (véase la Tabla 2-8). El primer digito idemtfica al grupo de a alea-
cid, El segundo digito indica modifieaciones de la aleaciOn original o un limice de
Propiedades metalirgicas de materiales de Ingenieria 81
Tabla 25 Designaciones pata las sleaciones
de aluminio forjable,
imps Lo ino ods ean aso ian np dt
arece ser neesario hacer en eta parte algunas alarasiones del sistema. Los
dos itimos gts dl grpo IXXX son uae efor don gion que extn ala de-
fecha del punto decal ara el porcentjedealuminio mini proximo a 01%
segundo cg india la modification, ila hay en tos inites de impure, Estas
puede ser cualquier nimero de 419, donde cer indica que no hay un controle
Becta deimpureaas, los Nims a 9 inclasieindvan control expecial de na 9
frase las mpureas, Por ejemplo, la lecin alumini 106) indica an eiimo de
99.60% de amin lel o require contol de iprer Sin embargo, ace
Gin alumino 1100 indica un minimo de 99 00% de luminol requere de con.
trol de una 9 mas de sus impureae
Para los qrapos restates dealeaiones(o san, 2XXX hasta 8XXX ielsive),
ls ims dos digits solo denfican ls alescons diferentes dealuminio dento
Signaciones ASTM y propiedades generales de varios elastomeros.
‘Propiedades metalirgicas de materiales de ingenieria 89
‘Tabla 27 Designaciones de la ASTM y propiedades generaies de los elast6meros,
50. Disefio de méquinas—teoriay préctica
‘Tabla 28 Propiedades de elastomers para propositos
generates
a
sue sumo ois6t
2 (geen, eam gone
0 EPR SBR. an 90-3000 400. 4
° {es is0=300
{e \ ae
5 eR. ¢ 50-100
wm US J ay
a [2h } seo
Las propiedades importantes de los elastémeros son evaluadas mediante
pruebas estandar de la ASTM, Las pruebas han sido estandarizadas para dureza, re-
Sistencia a la tensidn, alargamiento, médulo elistico, juego de tension y compre-
sin, resistencia a la abrasién, elasticidad, resistencia al aceite, caracteristicas por
baja temperatura y resistencia al deterioro por exposici6n al oxigeno, ozono, la luz y
clcalor, En la Tabla 2-8 se indican algunos valores cuantitativos de su resistencia pa
fa algunos elastomeros de propdsitos generales. En la Ref. {8] se incluye una exce-
lente guia para seleccidn de elastomeros, asi como a informacién acerca de sus pro~
piedades.
PROBLEMAS
1. :Cuales son los métodos disponibles para mejorar la cesistencia de las metales?
{.Cudles de estos métodos son los mas cominmente empleados?
1G jeno de tens sla catidad de deformacionresutane desputs de elminar ia cara de tension
juego de comprsioncaelmumo au el de ension ence.o que Ia carga cs de compres, Las pruebas
se reazan a ciferenesvemperauras as y para diferentes periods is.
Propiedades metalirgicas de materisles de ingenieria 91
. {Qué efecto produce el trabajo en frio en el acero?
5. Explique, por qué un metal de grano pequeno es mas resistente que el mismo’
metal con grano grande? {Como varian la ductilidad y tenacidad con el tamato
el grano?
J. {Cul es la principal razon para agregarle al acero un material de aleacion?
10.
ML
2
1B.
M.
15.
16
vm
18,
19.
20,
2.
2.
24.
{Qué otras razones hay?
. {Cual es la diferencia entre acero forjado y hierro vaciado?
Nombre los cuatro tipos de hierro vaciado e indique las ventajas y desventajas
de cada uno como material estructural
_ Defina los siguiente: (a) Acero hipoeutectoide. (b) Acero hipereutectoide. (©)
Acero eutectoide.
. {Cues son los constituyentes de lo siguiente?: (a) austenita, (b) ferrita, (c) ce-
mentita, (@) perlita, (e) martensita
Liste en el orden adecuado el procedimiento seguido para endurecer un acero al
carbon mediante tratamiento térmico. Nombre la Fase metaluirgica que se tiene
en cada paso.
Por qué un acero de bajo carbon no se endurece por tratamiento térmico?
Explique su respuesta, {Como generalmente puede endurecerse un acero de ba
jo carbon?
[iQué se entiende por revenido de un acero, y por qué se emplea este proceso?
Haga la distincidn entre recocido y normalizado. ,Cual es el propdsito de estos
procesos?
Desde 200000 t/a)
5,045, para aero y iro vacados a
ara alecones de magnesio vaio lesio-
Sets. pare anes fora (basado para via de
Propiedades mecdnicas de los materiales de ingeniena 121
para aleaciones de niquel-base y para aleaciones
de cobre 16)
5, = 0388, para aleaciones de aluminio forjado de resisten-
cia a tensién hasta 40 000 Ib/plg* (basado para
vida de 5 x 10" ciclos) (17)
para aleaciones de aluminio vaciado de resisten-
cia a tension hasta $0 000 Ib/plg (basado para
vida de 5 x 10*ciclos)
donde todas las relaciones estan basadas en una razbn de supervivencia de 50%
El esfuerzo ultimo para el caso de carga axial reversible de un espécimen pulido
¥y sin muesca es del orden de 15% menor que el correspondiente a flexion reversible.
‘Como guia de diseno (debido a que los resultados estin basados en datos muy espar-
idos) pademos usar [a relacién (3-19) para especimenes de acero sujetos a carga
axial reversible.
5, = 0.85 x esfuerzo iltimo en flexién reversible = 0.428, — (s6lo acero)
G19)
A primera vista, se esperaria que los valores por fatiga axial coincidieran “exac-
tamente” con los valores de (a fatiga por flexion, porque en la flexién las fibras lon-
gitudinales estan sujetas alternadamente a tension y compresién. La diferencia se
atribuye a [a gran dificultad de aplicar carga axial pura sin introducir una compo-
nente flexionante. Ademés, en la prueba axial de un espécimen todas las fibras lon-
situdinales estin sujetas al mismo esfuerzo promedio, En flexién, el esfuerzo varia
linealmente desde el eje neutro hasta las fibras més alejadas.
Para pruebas de torsion reversible aplicadas a especimenes de acero pulido y sin
muesca, el esfuerzo de fatiga es mas o menos igual al 58% del valor por flexién. Por
tanto, tenemos la relacion (3-20) para esfuerzo iitimo a torsién reversible.
Su
58 x esfuerzo ditimo a flexién reversible
295, (para hierro vaciado)
Las relaciones (3-21) y (3-22) pueden usarse para el hierro vaciado y el cobre, respec-
tivamente.
8 x esfuerzo ditimo a flexion reversible
(20)
325, (s6lo para acero)
48 « esfuerzo Ultimo a Mlexi6n reversible
228, (para cobre)
Para valores de resistencia tension elevados,e alo peo del esfuerzo ito reversible es aproxima-
laemene 16 000 Ib la para rvstencia de tensin de valor $8000 I ple?) Dafando despues Su valor. aun
122. Diserio de méquinas— teora y précica
ado el anass previo elaconado con este por carga reversible desi
a pun en pracbas de mboratocio con expesimenes puis
testes 2 Tae ae dein. Como conscuenca de exo el dsehacor
eae ore os daton por aquellos tatores que afeten aGversament 08
Cee ae ess nations de laboctorio. Los factors a considera Son
a ee amen erica, geomet, condiciones ambiente
1 ep Suen, HN. Cummings W. C. Seu (8) sugieren que 8
Sete De isto Fun meno basado esse alternates reais excede
sat ec valo mia en tou anal J, Mari (9) sie con-
(aa ee stores donna Tabla para cua se haga a determinason
side a a esos Serb oe valde esr io por carga reversible
0 ar or een os factores ue infayen a aig, Estos factored
en la dado ea as apitacones de dso porque mucha dea n-
Pe ar ra banada cn espeinees pruebas epeiias, La ieratra
formas octet sobeta propiedad de ata gue Pusan pro
guetace ferent Pogcventa my cperiada, Por tan, el eto dspone de
et cir para cent fs documentos expecies qu eng It
2 ee Hey persis, Desde ego, e convenient Que uno ec
informacion 9 ea dea coveted aa para aca entaja de aim
Sem et ee gona referencasdponbls se Henen as siguientes: () Me
Fora re aloman, MsCraw Hil Book Co, New York, 198%
ean Pique m ers pr O- Aen PH. Bask, MEGraw-
la 31. Factores que influyen on la resistencia a fatiga.
eee
2. Candin oo 2 Poe a 0089
2. Yana del str 3, Supeoner eer eto
5. Vlg 5. Yaron ae anotudes
1 Bap ern y worentonaca 6. Exponion 2 acacia
eagae oi -rige superical
deans pe costo
Propiedades mecdnicas de los materiales de ingenieria 123
Hill Book Co., New York, 1963; y (3) las referencias (4), 10} y (11 citadas al final
de este capitulo, se ha encontrado que son de mucha utilidad,
El analisis completo de todos los factores indicados en la Tabla 3-1 va mas alla
del alcance de este texto, Se consideraran solamente los factores de los cuales se di
ponga de datos cuantitativos. Esta informacion sera utilizada para ajustes en los va~
lores del esfuerz0 Ultimo por carga reversible S;hasta el valor de S,; que ¢5 el esfuerzo
de trabajo a fatiga. Sin embargo, como complemento en la See. 3-30 se hacen comen
tarios breves de los factores no cuantitativos importantes de la Tabla 3-1 que puedan
afectar al valor S, 0 S,
SECCION 325
Efecto de la variacion del material—
factor de confiabilidad
El factor debido a la variacion del material es muy importante y con frecuenci
descuidado por el disefador o analista cuando esta evaluando los componentes me-
cAnieos. En las Figs. 3-24 y 3-25 se muestran valores tipicos muy dispersados y ban-
das obtenidas de pruebas de fatiga en los metales. Como antes se menciond, la ma-
yor parte de las graficas y datos tabulados de los valores de los esfuerzos por fatiga,
son valores medios y por lo mismo implican una supervivencia del 50%. Debido a
que el andlisis de la fatiga, es en el mejor de los casos una estimacion, es conveniente
para el disefo considerar algin nivel de confiabilidad que tome en cuenta las va-
riaciones del material reportado con los datos S-N.
‘Al no tener informacion especifica ceferente a confiabilidad se sugiere (8) que
“el 8M del valor de la resistencia por vida-larga pueda suponerse como desviacion
estandar considerando que el macerial sea de buena calidad”. Las pruebas de fatiga
con diferentes aleaciones por lo general muestran curvas de distribucion estadistica-
‘mente normal, de tal manera que el esfuerzo altimo de fatiga para porcentajes fijos
de supervivencia pueda ser obtenido restandole un numero especifico (es decir, de-
seado) de desviaciones estandar del valor de la resistencia de fatiga media. Conside-
rado desde el punto de vista de factor de reduccién de la resistencia de Fatiga, pode-
‘mos escribir la Ec. 3-23.
Cy = 1 —008(D MF) 623)
donde C, = factor de reduccién de la resistencia de fatiga basado en la confiabili-
dad y el D.M.F. = factor de desviacién de multiplicacién de la Tabla 3-2,
SECCION 326
Influencia del tamafio—factor debido al tamafo
La influencia del tamafo sobre los valores de la resistencia dltima de fatiga puede ser
tun factor importante. Resulta obvio que deba haber algiin efecto debido al tamano
cuando el didmetro en la seccién mas pequenta de una viga sujeta ala prueba de rota-
cidn sea de 0.3 pl. Aunque se dispone de pocos datos cuantitativos, por las pruebas
124. Diserio de méquinas— teora y prictica
Tabla 32 Niveles de conflabilided
NO
ectuadas, se ha encontrado que los esfuerzos altimos de fatiga para un
memo material y dureza tienden a disminuit al aumentar el tamaho de los
fspecimenes sujetos a flexin y torsion (véase la Fig. 3-27). La explicacion de la dis-
minucidn del esfuerzo ultimo de fatiga 2s que al ser el espécimen de mayor tamafo es
nas factible que venga defectos interns (por ejemplo, inclusiones, enfriamiento 80
uniforme, ete).
Para especimenes sujetos a lexién y torsion con diametro mayor a 0.3 pig puede
tenerse una reduccion en su resistencia iltima a fatiga del 15% o mas en especimenes
hasta de 0.5 pla. de didmetro, Para especimenes mayores de 0.5 plg de diametro, la
Teduccidn permanece relativamente constante hasta para diémetro de mas o menos 2
ple después de lo cual empieza a aumentar, Con respecto a la reduccion tenida en
fspecimenes mayores, no se pueden hacer generalizaciones, pero éstas pueden ser
fan altas como 25-30%. Se sugiere para un disefo prudente usar un factor
C, = 0.10, al no tenerse informacion, Para diseftos crticos, las pruebas que se hagan
en los especimenes deberdn efectuarse con valores mas exactos. Sin embargo, al c&-
ilimitadas
Fig. 327 Efecto del tamatio-cer
28 de lexién, exialy de torsion. (De.
Gr Upson y A.C. Juvinal: Hand-
book of Stress and Strenght. The
Macmilan Co, New York, 1963.)
Propiedades mecdnicas de los materiales de ingeniaria 125
recer de informacion especifica, puede usarse la relaci6n (3-24) para obtener el fac-
tor de reduccion’ de resistencia a fatiga debido al tamano.
c
0.85 (para especimenes sujetos atorsibn y flexion desde pig hasta
2 ple de didmetro) 0-24)
ara especimenes con carga axial las pruebas indican que no es necesario hacer
lacorreccion por tamafo. La hipdtesis se basa en que independientemente del tama-
‘Ao del espécimen, el gradiente de esfuerzo es de valor cero,
SECCION 227
Efecto de los métodos de fabricacion
—factor por acabado de la superficie
E] método de fabricacién tiene efecto muy importante en las propiedades de fatiga
de los metales, Las diferentes téenicas de Fabricacion tales como vaciado, forjado en
caliente, formacién en frio, torneado, rectificado, pulido, soldadura, cemachado,
apernado, etc., todos contribuyen a alterar la resistencia de fatiga del material. Al-
‘gunos de los efectos mas marcados corresponden a la condicion del acabado superfi-
cial 0 a la condicion de una maquina o algtin componente estructural.
Acabado superficial
‘Se ha hecho bastante trabajo para investigar el efecto que tiene el acabado de la su-
perficie con respecto a las propiedades de fatiga y los resultados son aun confusos
por lo que el tema no ha sido adecuadamente cubierto. Sin embargo, en la Ref. (11]
‘en su Cap. 7 cita muchas referencias que contienen informacion detallada de interés
para el lector, Revisaremos s6lo aquellos aspectos de uso inmediato que conciernen
al disefiador
Noll y Lipson (12] hicieron coleccion de datos referentes al acabado de superfi-
cie, tomados de diferentes fuentes y trazaron curvas promedio de resistencia de fatiga
‘contra resistencia de tensi6n para cada tipo de superficie estudiada. En la Fig. 3-28
se muestra el resultado de este trabajo. Los datos usados en la Fig. 3-28 fueron des-
‘puts utilizados para trazar una serie de curvas que relacionan el esfuerzo de tension
para cada tipo de acabado de superficie como una funcion del porcentaje del esfuer-
20 de fatiga, Estas curvas pueden usarse para obtener factores de correccién para el
esfuerzo tltimo por cargas reversibles de un acero. Las curvas y factores se muestran
en la Fig. B-3 del Apéndice B.
El factor de reduccin C, por acabado de superficie es usado como un coeficien-
te multiplicador para modificar el esfuerzo Glkimo por fatiga de un material de la
misma manera que Cy y C,son usados. También, como en el caso de Cy y Cs para
ciclos de carga de 1000 0 menos, C,-se toma igual a la unidad debido a que se supone
que dicha carga es estatica.
ara carga cova variacin set de {O00 cicloeo menos, se supone que la carga es “esttea” y por tani.
126 Diseio de méquinas— teoria y préctica
n+ 08
sca mein io «189
Fig. 328. Esfuerza maximo por carga reversible
conta resistencia dima de tension pera varios
Seabados de superficie de materiales ferosos ¥
Siesciones. Los resultados estan basados en 2s:
pecimenes sin muesca sujetos a flexidn reversible.
fb: G. Linson yA. C. Juvinall: Handbook of
‘Stress and Strain, The Macmillan Co., New York,
1962,
La “curva rolado-caliente” de la Fig. B-3, Apéndice B, incluye datos de especi-
imenes que tienen ligeras irregularidades en su superficie, Oxido y defectos de costras
asi como tambien algo de descarburizacion.’ La curva “*tipo-forjado’” incluye espe-
‘cimenes con grandes irregularidades superficiales que contienen oxidos y defectos de
ostras ademas de tener descarburizacion total de su superficie. Esta combinacion
cde defeetos en la superficie y descarburizacion contribuyen grandemente a la reduc
cidn de la resistencia por fatiga.
‘Todas las curvas trazadas son conservadoras; por tanto, cualquier mejoria que
se haga en el maquuinado, eliminacion de costras, reducciOn de irregularidades en la
Superficie o eliminacién de la descarburizacion aumentara el valor de C;. Para obte-
het un valor ms exacto de Cm puede hacerse una interpolacion entre las diferentes
curvas de pulido, rectificado y maquinado usando los valores de la Fig. 4-57 para las
diferentes operaciones de maquinado.
Para materiales no ferrosos y aleaciones tales como de aluminio, magnesio,
cobre, laton, etc., no es necesario considerar el factor de reduccion por acabado su-
Ta decrburizasion (vse la Sec. 2.) no unicamente rece las propidades de resistencia enti sino
cue tambien Daj ia tetera Ge fim y dejan eset de fenin ceil peri
Propiedades mecénicas de los materiales de ingeniers 127
perficial debido a que los proveedores de estos materiales coman en cuenta el acaba-
do de la superficie en el dato que proporcionan de la resistencia de fatiga..
Soldadura
Lasoldadura, que constituye un método muy popular de fabricacion particularmen-
tecon el empleo de maquinas autométicas para soldar, puede causar una gran reduc.
cidn en las propiedades de fatiga de los materiales. La razon basica de esto es que la
soldadura produce un cambio geomeétrico de la forma en la union y por lo mismo ac-
tila como factor geométrico de concentracién de esfuerzo, En la Fig. 3-29 e muestra
tuna soldadura a tope simple y otra a tope doble. La carga F causa lineas de esfuerzo
que fluyen cal como se indica, asimismo causan incremento del esfuerzo en los pun-
tos 1, 2, 3 4. Ademas con una técnica adecuada para soldar, se Impide una penetra
cidn completa en puntos tales como 1-2 y § lo cual ocasiona porosidad ¢ inclusiones
de escoria que contribuyen a aumentar intensamente el esfuerzo, causando con ella
tuna reducci6n de la resistencia por fatiga. El recificado del material de soldadura de
refuerzo (es decir, la parte de la soldadura arriba de la superficie del material) mejo~
ala resistencia de fatiga de 10-20% [21]. Esta mejoria se logra tanto para soldadura
‘a tope longitudinal como transversal.
Fig. 2-29 Puntos de concentracién de esfuerzo en soldadures vpicas a tope.
Con barras de refuerzo colocadas sobre una soldadura a tope se reduce la resis
tencia de fatiga. Por lo general, a soldadura se efectia con materiales rolados en ca-
liente, recocidos 0 normalizados porque su resistencia esta basada en su composicion
mas que en su tratamiento térmico o trabajo en frio, Solo ciertas aleaciones de ace
10s, inoxidables austeniticos 0 de aluminio con tratamiento térmico son soldables,
principalmente con soldadura de tapon o de punto. Las juntas soldadas que son
‘enfriadas con mas rapidez en el aire con respecto a las partes soldadas deberan ser
recacidas después de soldadas para reducir los esfuerzos residuales de tension y las
posibles grietas, Sin embargo, algunos materiales soldados se vuelven fragiles con el
recocido. Las secciones grandes deberan precalentarse hasta cierta temperatura ade-
ccuada antes de ser soldadas para evitar tener esfuerzos altos de tensién en la solda-
dura cuando ésta se esta enfriando.
En el Cap. 17 se dan més detalles y métodos de analisis, también, en el Welding
Handbook de la American Welding Society tiene un breve, pero excelente, tratado
reference a fatiga en soldadura, podemos utilizar los factores de reduccion de resis-
tencia listados en la Tabla 3-3.
128 Diseio de miquinas—teoria y préctica
Tabla 33. Factor Cy de reduccién
de ia resistencia por fatiga
para soldadurs,
Goumioas ope ora rr
Sowa Ge pao oe enveno 0.70
Jans 00p8T con wat oma angular 0.00
Sie a
SECCION 328
Efecto de la concentracion de esfuerzo
Las causas de las concentraciones de esfuerzo (llamadas también elevadores de ¢s-
fuerzo) son muy variadas y numerosas. Son principaimente debidas a acabado su-
perficial, inclusiones no metélicas y a algunas otras que seran luego analizadas.
‘Una coneentracién de esfuerzo (0 elevador del esfuerzo) es cualquier condicion
material que cause que el esfuerzo local sea mayor que el esfuerzo nominal. Para
ciertas condiciones es posible determinar un factor de reduccion de la resistencia de
fatiga (es decir, Cr por acabado de superficie) y para otros (por ejemplo, rozaduras)
es posible soio confiar, en datos cualitativos y experiencia directa. La geometria 0
forma del espécimen, es uno de los factores mas importantes que contribuyen a la
conceatracion del esfuerzo con bases (al menos para casos simples) muy racionales,
En los casos en que no es posible el uso de técnicas analiticas se usan métodos experi-
imentales (es decir, fotoelasticidad, recubrimiento fragil, analogia de la membrana,
sgalgas extensométricas) pruebas con los componentes reales a usarse que propor-
tionan datos de mucha utilidad para el disefio. De hecho, actualmente se continiian
los trabajos con el fin de obtener dichos factores para el caso de esfuerzos combina
dos.
‘La definicion de factor de concentracion de esfuerz0 es
esfuerzo maximo en Ia seccién de interés _ au
K. = GSfuerzo nominal en la seccion de interés oy
donde K, sel factor de concentracin de esfuerzos (es decir, geométrico) te
cual esta dado solamente de acuerdo a la geometria del espécimen. Kes el factor
tebrico para corte
Considerese la placa de la Fig. 3-30a. Obsérvese que las lineas de flujo de fuerza
stn uniformemente espaciadas en cada uno de los extremos de la placa. Sin embar-
130, en la muesca las lineas de fuerza exteriores cambian de direccién y no estan uni-
formemente espaciadas. Por tanto, dentro de la vecindad de la muesca, estén fluyen-
Propiedades mecdnicas de los materiales de ingenieria 129
Fig. 3:30. (al Lnaas de fyjo de astuerzo de tensién. (b) Tubos de esfuerzo de igual par para
tuna flecha cieular escalonads.
do una mayor cantidad de lineas por érea unitaria, Por tanto, se incrementa el valor
del esfuerzo local. La linea de flujo de fuerza con maxima flexion es representativa
del esfuerzo mayor. A medida que las ineas se alejan de la muesca, éstas se vuelven
rectas, el esfuerzo se disminuye hasta su valot nominal,
La Fig. 3-30b muestra una flecha escalonada que ha sido dividida en cuatro con:
ductos huecos circulares y una flecia de centro sblido. Los tubos concéntricos en las,
secciones de mayor y menor diametro estan unidos por las lineas suaves indicadas,
Elespesor del tubo exterior en el punto donde las secciones se juntan es relativamen=
te grueso. Esto indica que el tubo exterior experimenta un esfuerzo alto. Nétese que
clespesor de la pared se aumenta al haber disminucién del radio, porque el espesor es
escogido de tal manera que el Angulo de torsiGn por unidad de longitud es ei mismo
para cada tubo, Este requerimiento es necesario porque el modelo de tubo concéntri-
co no debe experimentar ningiin deslizamiento angular si esto es lo equivalente a una
fecha solida. Como con una placa plana, las lineas de fuerza estan “‘muy apreta-
das" a medida que el flujo pasa a través de un punto de geometria (esto es restricti-
vo) cambiante.
Otro ejemplo que muestra la influencia dei cambio geométrico es la placa se-
rmiinfinita sujeta a tension con un pequefio agujero en su centro, tal como se muestra
en la Fig. 3-31, El andlisis teorico de la distribucién del esfuerzo indica que ste
sobre la linea tangente al agujero Jn, ¢5 3 veces mayor que el esfuerzo nominal op.
Entonces, el factor de concentracién de estuerzo te6rico K, es 3.
En el Apéndice B se tienen muchas graficas que corresponden a diferentes com-
binaciones geométricas sujetas a diferentes cargas. Este apendice no es muy comple-
to, por lo que se aconseja que el lector investigue las referencias citadas y otras fuen-
tes para aquellas combinaciones geométricas no incluidas en el texto,
‘Veamos de nuevo la Fig. 3-30a. Si as lineas de fuerza fueran consideradas como
fibras, éstas tenderian a enderezarse fuera de los puntos de discontinuidad por don-
de éstas pasan, en este caso la muesca V. Como consecuencia, de esto, hay la tenden-
cia de inerementarse ligeramente la distancia entre muescas. A esto se le lama efecto
biaxial debido a los elevadores geométricos del esfuerzo. Esto da como resultado
tuna ligera reduceidn del factor tedrico de concentracion de esfuerzo K, Sin embar-
go, la reduccion es pequena (del orden de 10%) y por lo general se ignora a este fac-
tor de modificacién en la mayor parte de las aplicaciones de disemto,
Los factores teéricos de concentracidn K, dependen slo de la geometria del es-
pécimen correspondiente. Si todos los materiales fueran uniformemente homogé-
130 Diseto de maquinas— teoria y prictica
Fig. 331. Disinbucién ool esfuerz0 para una placa
seminfnita con un agujero. La placa esté a tension.
neos y estuvieran libres sus superficies de marcas o rayas, podria justificarse usar K,
“tal cual” para el caleulo de esfuerzos a fatiga, Sin embargo, los materiales no son
hhomogencos y en la superficie no estan libres de defectos. Estas pueden facitmente:
rayarse, ser marcadas con una herramienta o prodiuciles rayaduras en filetes, cute
tos 0 en la orilla de algiin agujero. Las pruebas de fatiga han demostrado que el fac-
tor tsorico de concentracion de esfuerzo raramente se obtiene (excepto para algunos
aaceros de alta resistencia), En su lugar se utiliza un valor menor que X. Por tanto, ¢5
necesario definir un factor de concentracién de esfuerzo debido a fatiga, designado
por Ki.
‘c= ‘sluerzo iltimo por carga reversible en espécimen sin musse2 3,76)
= Ssfuerzo ultimo por carga reversible en espécimen con muesca
Debido a que se requiere hacer un niimero ilimitado de pruebas para producir
valores de K,, es muy deseable relacionar el valor te6rico K,con el de fatiga K para
diferentes tamanos de muesca, materiales y tratamientos térmicos. R. E. Peterson
(14) sugiere la relacion (3-27) llamada Factor q de sensibilidad a la muesca
Kyo
2m
a
© por torsion (o corte)
Resolviendo las Ecs, 3-27 y 3-28 para K; se obtiene
Kp=t4aK- 0 6-29)
Ky,= 1+ aK, = 0) (530)
Propiedades mectnicas de los materiales de ingenieris 191
Ahora podran usarse las Bes. 3-29 y 3-30 para obtener el valor de Ky en el supuesto
de que se conozca el valor de 4.
‘Aunque se tiene poca informacion referente a q para un niimero grande de ma-
teriales, la Fig, B-2 en el Apéndice B proporciona datos para materiales ferrosos de
diferente dureza y una aleacién de aluminio, Para aquellos casos en que no se tenga
informacién especifica referente a q, ésta se puede escoger de 01 MeVI hasta 175 °F (De Oscar J
Horger [Eds ASME Hondbook, Metals Engineering Desir,
2a. Ed. McGraw-Hill Book Company, New York, 1965.]
166. Disefio de maquinas—teoria y préctica
Los cambios mas acentuados ocurren a la temperatura de transicin en el caso
de muesca-impacto. Este indica que una exposicién con radiacién fuerte (esto es,
bombardeo de neurones) hard que casi todos los aceros y aleaciones de acero estén.
sujetos a fractura dictl debido a su reducida habilidad para absorber energia. En la
Fig, 3-46 se muestra claramente esta reduccion de energia impacto. Sin embargo, los
aeeros inonidables austeniticos no parecen resultar afectados con respecto a su sensi-
bilidad a la muesca. Esto es muy bueno porque casi todo el equipo (por ejemplo,
pombas, depositos, condensadores, etc.) y tuberias usadas en las instalaciones de
‘energia nuclear y en las pruebas efectuadas son de acero inoxidable.
PROBLEMAS
1. Para el disefo de un elemento, el ingeniero recurrira necesariamente a las tablas
de propiedades de materiales similares a las del Apendice A, (Qué deberd tener
fen mente al utilizar los datos de dichas tablas?
{Cuando es el esfuerzo de un miembro estructural de corta longitud linealmente
proporeional a su deformacion?
4, Que se entiende por esfuerzo verdadero? {Por esfuerzo ingenieril (no
nominal)?
4, Bleje de la leva de una maquina de hacer punto de media es hecha de acero AISI
1040 carburizado y se ha observado que se deflexiona mucho en su operacion.
El ingeniero de mantenimiento ha sugerido reemplazar al macerial del eje por
tuna aleacion de acero tratado térmicamente (por ejemplo, AISI 4340) con el fin
dde disminuir la deflexion. ,Resolvera esto el problema? Establezca la razon de
su respuesta
5. Un tipo particular de acero aleado va a usarse para una flecha. El modulo de
clasticidad en tension es de 29 x. 10*Ib/plg" y la relacion de Poisson es conocida
aaser 0.27, Debido a que la flecha va tambien a estar sujeta a torsién sera necesa-
rio conocer el valor del médulo a corte. ,Puede usted obtener este valor con la
informacién conocida?, si asi es, cual ¢s su valor?
6. Una barra de 0.75 plg de diametro por 10 pies de largo esté sujeta a carga de ten
sin de 26 500 Tb. Segin las mediciones efectuadas indican que la barra se alarg®
0.24 plg y su didmetro se disminuyo en 0.0005 pig. Determinar: (a) el modulo de
‘lasticidad en tensi6n; (b) la relacién de Poisson; (e) el médulo a corte; (A) la
clase general de materiales en la cual pueda encontrarse esta barra,
7. En una prueba de tension efectuada a una barra de acero al carbon de 0.875 ple
de didmetro, se obtuvieron los siguientes datos: a 20 000 Ib, cl espécimen se alar-
156 0.0087 pg en 8 plg; a 36 000 Ib se alarg6 0.022 pla en 8 plg; se observd ceden-
ia a 33 000 [b y la fractura ocurri6 a 60 000 Ib. Determinar (a) [a resistencia en
cl punto de cedencia; (b) la resistencia dltima; (c)¢! modulo de elasticidad en ten-
sidn; (@) el némero AISI de idemtificacion de este acero.
8. Una placa de - plg de espesor esta siendo procesada en una prensa mecéinica de
150ton. {Cuantos agujeros de 1 plg de diametro pueden ser perforados si el ma~
terial es aceto AISI 1020, cstirado en frio? ZCuantos agujeros si el material es
AISI 1020, recocido? ;Cuantos agujeros si el material es AISI 3140, recocido?
13, Cuando el peso W choque contra el “tops
Propiedades mecinicas de los materiales de ingenieria 187
9. Una barra circular de acero AISI 1020, recocido tiene 30 pig de largo. Esta suje-
ta a carga de tensién de 25 000 Ib. Si el factor de seguridad no debe ser mayor a
3, determinar (a) el diémetro de la barra para un esfuerzo correspondiente al
limite de cedencia; (b) el diametro de la barra correspondiente a ia deforma-
cidn limites (e) el didmeteo de la barra para el area de reduccion limite
10. Determinar la energia de deformacion por impacto del peso de 50 Ib para: (a)
una barra fabricada de acero; (b) de latSn; (¢) de aluminio. Supngase que el
80% de la energia del peso que cae es absorbida elasticamente,
t Figura del Prob. 10.
11. Caleular el médulo de resiliencia para cada uno de los siguientes materiales: (a)
cero AISI 1020 recocido; (b) acero AISI 4340 normalizado; (e) acero inoxi-
dable AISI Tipo 302 estirado en frio; (d) aluminio 2024-T4; (e) bronce manga-
eso A, meio enduresido; (9 season de magacsio ‘ASTM Tipo ZK60A-T5; (g)
inconel X-750.
42, Obcener la relacion de energia de deformacion para los dos sistemas mostrados.
Las barras son circulares.
Figura del Prob. 12
‘que est al final de la barra, el es-
fuerzo de tensin no deberd ser mayor a 20 000 tb/plg*. Suponiendo que toda la
cenergia del peso que cae es eldsticamente absorbida, determine: (a) el peso Wy
{(b) el peso W si todas las barras fueran de 1 pig de didmetro,
158
4.
15,
16.
1
18.
1.
20.
21
2,
Disefo de maquinas—teoria y préctica
Figura del Prob. 13,
(le
‘Traar a elacin entre fagdady deta
iors ice dean materal paca ase de una maquina la cull pena.
aoe vrei carga cinamics, cave propiedad importante deber8desearse
Ge tenga el mater? Nome echo mater
san a Tabla A.2 del Apéncve A, cleulr et médulo de enaided de sis
nce erent ara caca uno de losses mreilesesogios calcula e
io para cs condones de! mismo material (deberinhaceie 18 ceulos
yr separado).
Ia Cabaret resistencia ima pra os iguenes aceros AIS por medio dela
Ee
LOHR 4 414CDA 7. SION 10, 92S5HRA
TCD «5 AON 8 B5OCD 11, SHON
5.109586. 464CDA 9. 8740
(b) Calcular la diferencia en porcentaje entre los resultados de la parte (a) y los
valores indicados en la Tabla A-2 del Apéndice A.
{e) Hacer la misma comparacion indicada en la parte (b), pero
sus cdleulos con los valores obtenidos de la Fig. 3-17,
Deseriba el mecanismo de falla por fatiga.
{a) Para los aceros listados en el Prob, 18a, calcular tos esfuerzos tims por fa
tiga S!.
(h) Usando la Ee. 3-14 compare (esto es, caleule el porcentaje de la diferencia) et
tsfuerzo iltimo por fatiga para las fundiciones de hierro de clases 20, 30 y 50
con los valores mostrados en la Tabla A-l del Apéndice A.
(6) Repita la parte (b) para aceros fundidos de las clases 65 000, 105 000 y 200 000
‘mostradas en la Tabla A-1 del Apéndice A.
. Mencione seis condiciones que tiendan a hacer que un metal sea mas propenso
a fallar por fatiga,
. Una placa de + pig de espesor y 3 pig de ancho tiene dos muescas semicirculares
de + ple cortadas en direccion opuesta una respecto de Ia otra. {Cual es el valor
del factor teorico de concentracion de esfuerzos K,, si la placa esté cargada en
(a) tension y (b) flexién en el plano de la placa?
fa vez compare
Propiedades mecinicas de los materiales de ingenieria 159
23. Se tiene un cambio de didmetso de 2 a 1+ plg con radio del filete de {pig en el
punto de la discontinuidad de una flecha motriz. Determine el factor tedrico de
Concentracion de esfuer20 K,, sila flecha esta sujeta.a (a) flexion, (b) tension, (e)
24, En el Prob. 23, iqué factor tebrico de concentracion de esfuerzo se utiliza si se
tiene un agujero de lg de diametro para efectos de lubricaciOn, taladrado ra-
dialmente en la parte dela flecha de 1 + plg de didmetro y localizado muy cerca
Gel filete de + plg. Determine los valores adecuados de K, para (a) flexion, (6)
tension, (€) torsion.
25, La figura muestra una barra de hierro vaciado clase 25 que esd sujeta a carga de
tension estable, ,Cual seréel factor de seguridad? ;Cual ser el factor de seguri-
dl i se Lene carga de compresion de la misma magnitad?
rete on
| f roaeame
eae Figura del Prob. 25
Enel Prob. 25, cual sed el factor de seguridad si el centro del agujero de 1 plg
Ge cidmetr9 estuvieralcalzado a pig de una de as oils de fa paca? (Cons
dere solo # aso de tension.)
27. Repita el Prob. 25 para el caso de que el agujero sea de (a) + pl de diémetro,(b)
“ple de eidmetra
28, {allve de casquilo 0 de cubo mosiada en a figura cs de Fundicion case $0.
{cual sera el par de rorsion maximo que pueda aplcarele sel factor de segui-
Gad no debe exceder a2? (Considere solamente el cambio de seecion en el radio
ae filet.)
Figura del Prob. 28
29.*La figura muestra una viga maquinada la cual esta empotrada, es de material
acero AISI 1040 recocido. La carga F es inestable y por tanto, sera necesario
considerar en el disefio de esta viga su resistencia a la fatiga (para vida finita) 0
Eis problemas epresentan so para quel estudiantes falarice con el procedimienta segido pa
Teobrener el estes de fatign de abajo Sy En a Cap. 7 Gene la alse de ext concento et Ut
problema completo
160 Diserio de méquinas teary préctica
su esfuerzo tiltimo de Fatiga (para vida infinita). Considerar que el valor de Sa
lisarse corresponda a una razon de supervivencia de 95M%. En la solucién de este
problema use la Ec, 3-13 y compare su respuesta final con la que obtendré si
usara (a) las Bes. 3-12 y 3-13 y (b) si usara solo la Fig, 3-28.
rT — 1
Figura dal Prob. 23
30,*Resuelva el Prob. 29 para el caso que el agujero estuviera localizado en el fete
de 4 pla de radio.
31.*Resuelva el Prob. 29 para el caso de que la carga sea un par de torsién inestable.
3al*La fecha que se muestra en la figura ¢s de acero AISI 4340 HRA, y est ma
{uinada a las dimensiones indicadas. Después es templada en aceite y revenida a
1475 °F. Si se le aplica un momento flexionante inestable, determine el esfuerzo
de fatiga de trabajo S, para cada concentracién de esfuerz0.
seen tT
St
Figura dol Prob. 32.
yer
33.*Repita el Prob, 32 para carga de torsidn inestable.
34.7Repita el Prob. 32 para carga axial inestable, Supunga que para este problema
no se tiene cunera,
|
|
|
|
|
|
|
Propiedades mecénicas de os materiales de ingenierla 161
) En el Prob. 32, zqué mejoria es de esperarse que se tenga en el esfuerzo tilti-
mo de fatiga, tanto para la ranura como para el filete, i cada uno de estos fuera
formado por rolamiento superficial? {Cual es la razon de esta mejoria?
(b) Podria lograrse ia misma mejoria si la flecha fuera perdigonada?
(€) De qué otra forma cree usted que podria mejorarse el esfuerzo titimo de fa-
tiga de la flecha?
REFERENCIAS
{1] Metals Handbook, Vol. 1, 8th ed. The American Society for Metals, Metals Park
Ohi. 1961
2] Technical Edior Speaks. The International Niekel Co., Inc., New York, 1943.
JH. Frye: Selection of bar steel used as rolled or drawn. Metal Progr ,47: 497-508
(March 1945)
{H] Batelle Memorial Institute: Prevention ofthe Failure of Metals Under Repeated
Siress. Foha Wiley & Sons, Ine, New York, March 1949,
5] §. Timoshenko and G. H. MacCulloush: Elements of Strength of Materais, 2nd ed.
D. Van Nostrand Co, Inc., New York, 194, p. 318,
(6) V.M. Faires: Design of Machine Elemenis, 4th ed. The Macmillan Co., New York,
1965, p. 102,
I) Lionel S. Marks (ed.): Mechanical Engineers’ Handbook, Sth ed. McGraw-Hill
Book Co,, Ine. New York, 1951
(8) F. B. Stulen, HN. Cummings, and W. C. Schulte: Preventing fatigue failures,
art §, Mack, Des. 33, June 22, 1961,
[9) Joseph Marin: Mechanical Behavior of Engineering Material, Prentice-Hall.
Englewood Cliffs, NJ, 1962.
(10) C. Lipson and RC. Juvinall: HandBook of Siress and Strength. The Macmillan
Co, New York, 1963
11) Oscar J. Horger (ed.): ASME Handbook, Metals Engineering Design, 2nd ed
McGraw-Hill Book Co., New York, 1965,
[12} G.C. Nolland C. Lipson: Allowable working stresses. Proc. Soe. Exp. Siess nai
30): 89-101 1946)
(13) C. H. Jennings: Welding design. Trans. ASME, SB: 497-508 (1936),
14} RE. Peterson: Relation between sre analysis and fatigue of metals. Proc. SESA,
11): 199-206 (1954),
[15} TE, Eagan: Cast ferrous metals, Part 3, Steel, 136(22), (1954): 13542
(1958,
[16] R. B. Heywood: Designing Against the Fatigue of Metals. Reinhold Publishing
‘Comp. New York, 1962, p. 158
[17] H. E. Boyer: E¥fects of grinding on physical properties of hardened steel parts
Trans. ASME, 40: 491-303
J. Frisch and E.G, Thomsen: Residval grinding stresses in mild steel. Trans
ASME, 73: 337-342 (April 1951)
{19} B Cina: Effect of surface fnish on fatigue, Merallurga, $8: 1119 Jan. 1957)
120) Shot Peening. Wheslabeator Frye Inc., Mishawaks, Ind, 1967
\ 80-82
a
162. Diseiio de méquinas—teora y préctica
[2M] RL. Matson: Proceedings, Imernational Conference on Fatigue of Metals. The
Institute of Mechanical Engineering, 1936, London
23} C. Lipson: Mote realistic measure of shot-peening effect
os
25) C. Lipson. C.G. Noll and L-S. Clack: Sess and Siremgih of Manufactured Parts.
McGraw-Hill Book Ca. Ine.. New York. 1950,
[24 H.R. Thomas and V. A. Hoersch: Stresses dus tothe pressure of one elastic solid
pon another, Unicersiy of Minos Engineering Experimental Staion Bull. No. 212.
28) S. Way: J. Appl, Mech, $7: A9-A71 June 1935), Discussion with reference 10
intiles by O11) Horger entitled “Fatigue strength of members as influencrd by
Sivface conditions” which appeased in Prod. Eng. Nov... Dec. 1940, and Jan
8. Steel (Aug 6
RE. Peterson and A.M. Wahl: J. Appl. Mech, $8: ATLA7S une 1936),
Discussion of 4 report by H.F. Moore eniled “A study of fatigue cracks i ear
anles-* University of Tinos Engineering Experimental Sravion Bull. No. 163, June
4, 192
JM Lessels:Sirengtvand Reststance of Metals John Wiley and Sons. New York
"9
HF. Moore and J. B Kommers: An investigation of the
Cnicersts of Hines Engineering Experimental Station Bull. No
23] R.A.C. FosbernyandH. D. Mansion: Bendingatigue of ge
Research Association Report 1980-1957
30} E.R Gad: Fatigue fom the metallurgists viewpoint. J Roy, Aeronaut Sve. $7
565 (Sept. 1953),
teeth, Motor Indstrs
Care Lipson: Wear Conerations ix Design, Prentice-Hall Ine Englewoo
Cliffs, NJ. 1967, " ™ ‘
a
Procesos de Fabricacion
y Disefio
simpotos
desviacion estandar de la soma
ie las partes ensambladas, + pig
ems © raiz cuadrada de la media
td los cuadrados dela aspereza
de superficie, micrapulaadas (pls)
T= acurulacin de la tolerancia
cotal, pl pa
Tr, = toleranvia de n-ésima parce
ensamblada, pig
esviacion estindar de la ns
nsamblada, ply
E! desarrollo de un dispositive o de una maquina para desarrollo de una funcion
specifica, forma solo una parte dela area del disefo. La creacidn de un disefhador
Seeal que después de pasar por la mesa de dibujo, la parte disetada debe realizarse
jcamente y set fabricada. Por fabricacion se entiende que todas las partes compo-
rentes se deban de construir y ensamblarse a un costo competitivo. Para lograr este
Dbjetivo, el diseRador deberd tener mas que un “conecimiento pasajero”” de los pro
cecos de fabricacidn. En particular, debe estar familiarizado con las instalaciones
(que tenga dentro de su propia compaitia para la fabricacion y produccién.
Noes de esperarse que el disefiador sea un fabricante de herramientas 0 un ope-
rador de maquinas, etc. En lugar de eso debera conocer las capacidades de fabrica-
on basicas y el equipo de proceso en el taller. Solo con el conocimiento de lo ante
fior podra diseNar adecuadamente las partes componentes, seleccionar materiales,
tespecificar tolerancias, considerar los procedimientos de ensamble, etc.
Se tienen diferentes métodos de produccion, materiales, tolerancias y procedi
rientos para cuando una pieza Va a ser fabricada millones de veces o miles de veces
ei colo se va a fabricar una simple unidad. Como se indicd en el Cap. t, el diserio
snvoluera un comprotniso y el método de fabricacion solamente agrega otra faceta
fa decision que incluye el proceso de fabricacion concerniente al disefo,
En ef presente capitulo, se hace un breve resumen de los métodos basicos de
fabricacion y se indica la funcién y limitaciones de cada método. Se hace también ux
repaso referente al dimensionamiento y finalmente se termina el eapitulo con cor
Inentarios referentes a un Buen disefio practico.
I
|
|
164. Disefo de maquines—teorta y préctica
SECCION 41
Introducci6n
Los procesos de fabricacin pueden clasiticarse' en dos grupos generales conocidos
como procesos primarios y secundarios. Los procesos primarios (véase la Fig. 4-1),
principalmente, vaciado, metalurgia de polvos, furjado, encabezamiento en frio,
extrusion en frio, estampado, embutido profundo, rechazado, formado en rodi-
llos, extrusion en caliente, formado con dobladora, etc., son aquellos que le dan for~
ma al material en bruto, Estos métodos de formado incluyen procesos de trabajo
tanto en caliente como en frio y, en general, requieren de cierto acabado a fin de ob-
tener el producto deseado,
‘Los procesos secundarios son aquellos que proporcionan a Ia pieza las dimen-
siones y acabados superficiales especificados. Pueden incluirse en los procesos se~
ccundarios operaciones tales como tratamiento térmico y de acabado superficial para
resist a a corrosidn, dureza y dar !a apariencia deseada. Los procesos secundarios
son acepillado, limado, torneado, fresado, taladrado, perforado, rimado, esmerila-
do, asentado, rectificado, pulido y métodos especiales para eliminacion de metal ta-
les como maquinado pot electrodescarga y maquinado electroquimico. Las opera
ciones tales como cortado de tornillos, tarrajado, labrado de roscas, cortado de
‘engranes, etc., son procesos secundarios que son adaptaciones de uno de los proce-
sos antes mencionados.
SeCCION 42
Procesos primarios
En la Fig. 4-1 se muestra esquematicamente algunos de tos procesos primarios de
fabricacién. El andlisis completo de estos procesos va mas alla del alcance de este
texto, por tanto, s6lo se darn explicaciones breves de las téenicas més prominentes,
Vaciados
Los vaciados estan identificados por el tipo de molde o por la fuerza necesaria para
enado det molde. Los moldes pueden ser permanentes o cambiantes. Sin embargo,
Jos moldes de arena, cascos y moldes de plastico pueden usarse repetidamente ha-
ciendo nuevos moldes. Los vaciados pueden efectuarse vaciando el metal fundido en.
tun molde o en una matriz. A medida que e! metal se enfria toma la forma de la cavi-
dad. En las Tablas A-1, AB, AIO, Ally A-I2 eneel Apéndice A se indica una gran
variedad de metales que pueden ser usados en el proceso del vaciado. En seguida se
describiran los métodos basicos de vaciado.
Piezas fundidas en arena. 1: El proceso de arena verde es aquel en el cual la are-
nna hmeda es apisonada alrededor de un modelo de madera o de metal. Se quita des-
‘No hay un método claramente definido para casifiar los procesos de fabrcacon, Algunas invesi-
saciones encuentran ciras referencias que bas las clasifcaiones de fabrzacionsegun fs metodos
{Sc trabajo en ft een caliente, oor ett basador en vaciado,formado y maqvinad, ¥ oom mas de
ever a po de eferza creado, a6
Procesos de fabricaciéin y disefio 165
emery
ESCUELA UNIV
POLITESNIDA =
Bisit
Fig. 41 Dibujo esquematico
e ios pracesos primarios.
165 Diseno de méquinas—teoria y practica
pués el modelo y se vacia el metal fundido dentro de la cavidad, Cuando el metal se
Tolidifica, se rompe el molde y se saca la pieza vaciada. Mas 0 menos puede usarse
cualquier metal, virtualmente sin limitaciones de tamaho y forma de la pieza. Con
ste método se puede tener vaciado de piezas muy complicadas y con costo bajo de
is herramientas necesarias, éste es el camino mas directo de vaciado.
Siempre sera necesario efectuar algin maquinado @ las piezas vaciadas con el
proceso de arena verde, las piezas grandes salen con superticies rugosas. Es dificil
tener tolerancias cerradas y no es posible el vaciado de piezas grandes y delgadas. Sin
embargo, se pueden tener disefios con protuberancias, muescas de guia e insertos. El
diametro minimo aconsejable de agujero para corazon es de % — + pla y los espeso-
res minimos aconsejables de las secciones son: para aluminio, : pig: cobre, plas
hierro, & plg; magnesio, ply: y asero + — + ple
2. Bl proceso de arena seca ¢s similar al proceso de arena verde excepto que se
usan cajas de corazones en lugar de modelos. Por lo general, este proceso se limita
para piezas mas pequefias que las obtenidas con el proceso anterior. La arena se re
‘uelve con alain aglutinante y después el coraz6n se calienta en un horno hasta 30a
400 °F para eliminar la humedad.
3. El proceso de arena didxido de carbono es aquel en el cual los moldes de ar
ra son mezclados con soluciones de silicato de Sodio suministrandose a presién gas
de bioxido de carbono a través de la arena, Este tipo de moides es fuerte y se obtie~
nen producciones de vaciado con mejor control de sus dimensiones con respecto de
las dos métodos anteriores.
“4. El proceso de moldea corazéin de arena es aquel en el cual los moldes son co-
locados uno junto al otro y son endurecidos en hornos con aglutinantes tales como
accite o dextrinas
En la Fig, 4-2 se muestra la construccién de un molde de arena tipico.
ae “
Fig. 42. Moldao de arena spico para males frro-
sos y no ferrosos. (Oe 1970 Metals Reference Issue,
‘Machine Design, Panton Publishing Co... Cleveland,
Ohio.
Vaciado en molde de eascardn, Fs 1m proceso en el cual ios moldes son hechos
revistiendo la arena con plistico endurecido por “alor (véase la Fig. 43). Exterior
Procesos de fabricacién y disefio 167
A LL
Fig. 43. Molde de casearén sin modelos, (De 1970
Metals Reference Issue, Machine Design, Perton Pu
biishing Ca,, Cleveland, Ohio.1
mente el molde esta colocado en arena 0 perdigones, después el metal fundido es va-
do. Cuando se solidifica el material se rompe el molde y se saca el vaciado.
Los productos vaciados en molde de cascaron son de superficies lisas, estructura
de grano uniforme, mucha exacttud en sus dimensiones, la velocidad de produecion
ts rapida y son minimas las operaciones de acabado. El espesor minimo de los va-
tiados es de 4 — £ plg, pero debe evitarse el vaciado de secciones donde la relacion
maxima-minima de espesores sea mayor de S a 1. Pueden vaciarse con facilidad pie-
as con protuberancias, muescas de guias ¢ insertos y el diametro minimo de agu-
jero para corazon es de} — + pig. El método es relativamente caro y esta limitado
a unos pocos metales.
‘Vaciado de molde completo. Es un proceso en el cual Ia arena verde o arena
mezciada con una resina aplicada en {rio es apisonada alrededor de un modelo de
plastico espumoso (por ejemplo, poliestireno). El modelo de plastico se vaporiza
‘entro del molde al vaciarse el metal fundido. Se obtiene un mejor acabado de la st~
perficie colocando un recubrimiento tipo refractario sobre la superficie del modelo
fantes de apisonar la arena. El modelo puede ser de una o varias piezas, dependiendo
de la complejidad de la pieza a vaciar.
‘Los modelos de plastico se manejan con facilidad, No requieren de tiro y no
inflaman durante et vaciado. El método puede utilizarse para producci6n de cant-
ddades pequetas, dependiendo dei tamafo y complejidad del vaciado. El espesor
‘minimo de seccin recomendado ¢s de 0.1 plg y la maxima seccion no tene limitacion.
[Las protuberancias, mueseas de guias ¢ insertos no representan problema alguro
con este tipo de vaciado. El didmetro minimo para agujero de corazones es de + Dla.
‘Vaciado en molde permanente. Estos se forman en moldes que pueden usarse
repetidas veces, Para algunas aplicaciones se han reportado hasta 25 000 vaciados
on el mismo molde. Por lo general, el molde requiere de algunas reparaciones des-
pués de haberlo usado 3000 veces. Los moldes son de metal maquinado (por ejem
plo, fundicién gris) para vaciado de metales no ferrosos y para hierros vaciados. Pa-
fa vaciado del acero se usan moldes de grafito maquinados.
168 Disefo de méquinas- teora y préctce
Con este método se producen vaciados que tienen muy buen acabado superficial
asi como también estructura de buen grano, baja porosidad y gran exactitud de di-
mensionado. El costo inicial det molde es relativamente caro, pero se pueden produ-
tir vaciados con peso desde pocas onzas hasta de aproximadamente S00 Ib. Los vax
ciados en molde permanente estan limitados a piezas de forma y perfil relativamente
simples. El espesor maximo recomendado para una secci6n es de 2.0 pg. Sin embar~
go, el espesor minimo dependera del material a vaciar y es de: plg para hierto,
2 — | ple para aluminio, ¢ ple para magnesio y 2 — jt plg para cobre. El diame-
de agujero minimo para el corazén es de 3 — + pis.
Fundicign a presion. Es un proceso muy usado para produccién en cantidad de
piezas de forma complicada de zine, aluminio, plomo y aleaciones de magnesio. El
métoda esth limitado a usarse con aleaciones de estaho y cobre,
Los vaciados se forman forzando al metal fundido bajo presiones de 1500-25 000
tb/plg! dentro de una matriz de acero maquinada a gran precision. La matriz de ace-
ro, que es enfriada con agua, permanece bajo presibn mediante una prensa hidrauli-
cahasta que él o los metales vaciados se soliifican. Para facilitar la expulsion de as
piezas vaciadas, se rocia un lubricante sobre la superficie del dado formador y de los
pernos de expulsién. Para piezas pequetas fundidas a presin se utlizan matrices
con cavidades maliples.
El acabado superficial de los vaciados resultantes es muy liso y con muy buena
exactitud en sus dimensiones. Aunque el costo del producto es relativamente barato,
€l costo inicial de las matrices es alto. El vaciado a presion esta limitado a metales no
ferrosos y también por el tamaflo de a pieza que vaya a ser vaciada. El espesor maxi-
mo de ia pared de una seccidn, generalmente esta limitada a = plg pero no debe ser
‘mayor que 0.50 pla
Las Figs. 44a y b muestran los dos tipos bisicos de maquinas usadas para fun-
dicion a presion.
‘Vaciados en molds de plastico. Se usan para vaciados de aleaciones no ferrosos
(por ejempio, aluminio, cobre o aleaciones de zinc) en un moide de plastico, el cual
después se rompe para extraer el vaciado solidificado. Los vaciados producidos por
‘ste método, son lisos, tienen gran exacttud dimensional, baja porosidad y pueden
producirse piezas de forma muy complicada. Sin embargo, el método tiene la des-
‘entaja de estar limitada a metales no ferrosos, a vaciados pequefios y ademas se re-
quiere de un tiempo relativamente arande para hace: los moldes. El espesor minimo
de la pared de una seccion es de 0,040-0.060 plg para areas de vaciado menores a 2
ple Para areas de vaciados mayores el espesor debe Ser mayor.
El proceso Shaw, desarrollado en la iltima década, es el método més prome-
tedor, Este utiliza moldes de plistico. Con este procedimiento se obtienen vacia-
dos con detalles muy finos y con excelente exacitud dimensional y acabado de su-
perfcie
Vaciado en molde eerimico. Este proceso usa molde hecho de polvo cerdmico,
aglutinante y agente gelatinoso. El molde puede hacerse de revestimiento ceramico
reforzado con arena. El método esta restringido al vaciado de piezas muy complica-
das que requieran detalles muy finos, tolerancias muy estrechas y acabados isos. El
‘spesor minimo de pared recomendado es de 0.025-0.50 pig. Sin embargo, no se
ene limite alguno en el espesor maximo de la pared.
Procesos de fabricacién y aiseio 169
Fig. 44 (a) Cémara caliente de a méauina de vaciado a presion desde donde ei metal func
o/on al reipionte del metal es empujado por el émbolo a través del conducto en forma de Sy
de la sobera dentro del dado formador. (b) Cémara fra de la maquina de vaciado a presién
Sesde donde una cantidad predeterminada de metal fundido proveniente del cazo de colaca
ts vacado denvo de la maquina y forzada por el mbolo a introducirse en el dado. Se ter
Velocidad de produccion mayor con la méquina de cémara caliente excepto para el caso ce
‘Ratersles cuya temperatura de fusion sea alta (por ejemplo, laton, broncel. [Corteia de New
‘Jersey Zine. Company.
170. Disaio de miquinas—teoria y préctica
Fig. 45 Alabes y vanas de turbinas de gas nechas por ef metodo de vaciado de precision o
fonvoitura, Los materialae usados fueron cobalto ¥ aleaciones 9 base de niguel por Sus pro
piedades de temperatura resistencia. [Coresia de Howmet Corporation, Pechiney Ugine
Kuhlmann Group.
Vaciado de precision o de envoltura. Estos se hacen cuando las piezas que se de-
sean obtener son de forma complicada, de excelente acabado superficial y que
Quieran de alto grado de precision en el dimensionamiento (por ejemplo, 0.003-
0.0007 plg si es de uta pulgada de longitud agregéndole 0.002 pig por cada pulgada
adicional), Ademas este método de vaciado permite ei uso de una variedad de alea-
ciones metalicas (véase la Tabla A-12 en el Apéndice A) y no es necesario quitar me-
tal escurridizo en el vaciado obtenido,
En la téenica de vaciado de precision se requiere tener una cuidadosa mano de obra
¥ los moldes y modelos son caros. El espesor de pared minimo en estos vaciados es
de 0.025-0.050 pg y el espesor maximo no debe exceder a 3 pig. En la Fig. 4.
ilustza la complejidad de productos que pueden ser vaciados con este procedimiento.
Vaciado centrifugo. Con este método se obtiene perfiles vaciando el metal fun-
ido dentro de una caja de moldeo rotatorio que es la que contiene el molde. Los
moldes son hechos de arena, metal o grafito (dependiendo del metal a vaciar) y se
hacen girar alrededor de sus centros axiales ya sea en posicién horizontal o vertical.
Con este proceso de vaciado centrifugo se hacen piezas voluminosas de diame:
tto relativamente grande, Algunos vaciados tipicos obtenidos por este método son
Pracesos de fabricacién y dlseffo 171
Fig. 48 Méauina de vaciado centrifuge tine horizontal. La arena es presionada progresive:
mente cuando la caja de moldeo estd en posicion vertical antes de ser colocada s0b¢e los ro-
Glos. (Coresia de American Cast Ion Pipe Company.)
Fig. 47. Seccién a través de una caja de moldeo de un molde
¥ Waciado semicentrifugo, [Cortesia de American Cast ron Fi
pe Company.
tuberias, tanques de asencamiento, flechas huecas, rodillos para maquinaria,
guillos largos, etc. Fl eje de rotacian puede ser vertical cuando la relacion de diame:
tro a longitud es muy grande. Las piezas vaciadas de esta manera pueden ser engra-
nes anillo, discos para fabricar engranes, camisas interiores de cilindros, chumac:-
ras, anillos, ete. La Fig, 4-6 muestra una maquina de vaciado horizontal
Cuando os corazones se usan en moldes colocados verticalmente, el método se
llama vaciado semicentrifugo, ¥ es utilizado para hacer piezas tales como ruedas,
diafragmas de turbosupercargadores, discos, volantes, etc. En la Fig. 4-7 se muestra
la seccidn esquematica de un vaciado semicentrifugo de un volante moideado.
Por lo general, ei método de vaciado centrifugo es caro y esta limitado a perfiles
que puedan ser vaciados. Sin embargo, lus vaciados hechos con este proceso soa
172 Disefio de mBquinas-—teora y prictca
rnuy eesistentesy tienen muy buena exactitud dimensional. Es de mencionarse que
teste método es nico para obtener piezas cilindricas grandes,
Vaciado continuo. Este es un método por medio det cual un metal fundido es
La dfiiconescitadas se encvenran ene folleo No. AWS A3.0-69 dea American Welding Society t=
tatado Terms and definitions, Para un als mas peofundo dea soldadura, se recomienda al ecor ae
lea et American Socery of Welding HondBookis), Vols. Val 8.
188 Disefo de miquinas—teoria y practice
Fig. 427 Carta maesira de los procesos de soldadura, (Cortesia de American Welding So
Siety.|
producir el calor. Se pueden usar fundentes para reducir la oxidacion y para promo-
ver tna mejor union soldada. Este tipo de soldadura es apropiado tanto para meta-
les ferrosos (ineluyendo el hierro vaciado) como para metales no ferrosos y.¢s capaz
de soldar seceiones metalicas gruesas,
La soldadura oxihidrgeno (OHW) se usa con metales de bajo punto de fusion
tales como aluminio, magnesio y plomo.
La soldadura de gas a presidn (PGW) usa una flama de oxiacetileno como fuen-
te de calor pero no requiere de varilla de relleno. En su lugar, la fusion se obtiene
aplicando presién en las partes calentadas, ya sea mientras estan calentandose o des-
pués de que las piezar hayan tido calentadas. Esta forma de saldadura puede usarse
para unir metales ferrosos y no ferrosos.
Procesos de fabricaciin y disefio 189
Soldadura por arco
La soldadura por arco es “un proceso de soldadura donde la unién es producida por
calentamiento con un arco 0 arcos con o sin la aplicacién de presién y con o sin el
uso de metales de relleno". Como esta indicado en la Fig. 4-27, hay ocho diferentes
procesos de soldadura por arco. Estos son (1) soldadura arco-carbon, (2) soldadura
de arco-metal protegido, (3) soldadura de arco con niicleo fundente, (4) soldadu-
ra de arco-gas metal, (5) soldadura de arco-gas tungsteno, (6) soldadura de arco su-
mergido, (7) soldadura de arco-plasma y (8) soldadura de esparragos.
El que mas se utiliza de éstos métodos es e! proceso de soldadura de arco-metal
protegido (SMAW). Este se define como “un proceso de soldadura por arco donde
fa union es producida por el calentamiento con un arco entre un electrodo metilico
protegido y las piezas de trabajo. La proteccion se logra con la descomposicion de la
Cubierta del electrodo. No se requiere hacer presion y el metal de relleno se obtiene
del electrodo”. La Fig. 4-28 muestra la nomenclatura usada en la soldadura por arco.
El proceso de soldadura de arco-metal protegido se emplea para produccién en
forma manual o automatizada. Hay electrodos para soldadura de metales ferrosos
(inciuyendo el hierro vaciado), aceros al carbén, en todos los grados, aceros de alta
resistencia, de aleacion baja, aceros inoxidables, aceros para cojinetes de cobre,
aleaciones de cobre, aluminio, niquel, aleaciones de niquel y bronce. Esta técnica de
soldadura es utilizada en muchas areas, particularmente en la fabricacin de ma-
quinaria, equipo de transporte, sistemas de tuberia y en varias estructuras (por
ejemplo, edificios, armaduras, bases de maquinas, etc.)
Los siguientes dos métodos de saldadura por arco mas usados son el proceso de
arco sumergido (SAW) y el proceso arco-plasma (PAW).
Soldadura de arco sumergide (SAW). Es “un proceso de soldadura donde la
unin es producida por el calentamiento con un arco o arcos entre un elestrodo 9
electrodos metalicos sin cubierta protectora y las piezas de trabajo. El arco queda
cubierto por una capa de material granular fusible colocado sobre la pieza del traba-
jo. No se ejerce presion y el material de aporee se obtiene del electrode y algunas ve-
ces de una varilla suplementaria de soldadura.
Este método puede usarse con equipo totalmente automatizado donde estén
controladas las alimentaciones tanto de electrodos como de fundente granular. El
Fig. 428 Elementos del proceso de soldadura por arco
190. Disefo de miquinas—teoria y préctica
método también se adapta a equipo semiautomatizado donde la alimentacion de
lectrodos y fundente granular se controlan manualmente. Debido a que el fundente
granular debe cubrir la union a soldar, este metodo estélimitado a piezas colocadas
fn posicién horizontal y es particularmente adaptado para uniones en linea recta y
de gran longitud. Ademas, requiere de menos pasadas para soldado de secciones con
espesor grande del metal de aporte que las normalmente requeridas con el método de
soldaduras de arco con metal protegido.
La soldadura de arco sumergide puede usarse con aceros de bajo carbon, aceros
de aleacion baja y alta resistencia, aceros al cromo y aceros austeniticos al cromo-
riquel. Con métodos especiales es también posible soldar aceros endurecidos al aire
de alta aleaciGn. En la Fig. 4-29 se muestra el arreglo y la nomenciatura del proce:
so de soldadura de arco sumergido,
Soldadura arco-plasma (PAW). Es “un proceso de soldadura por arco donde
las uniones producidas por calentamiento con un arvo ligado entre un electrodo y la
pieza de trabajo (arco transferido) o el electrodo y ia tobera ligada (arco no transfe~
Fido). La cubierta protectora se obtiene por lo caliente de la emision de gas ionizado
del otificio, el cual puede ser proporcionado por una fuente auxiliar de gas de pro~
teccion, Fl gas de proteccion puede ser un gas inerte 0 una mezcla de gases. Puede
ejercerse 0 no presion, ¥ puede 0 no suministrarse metal de aporte”™
La soldadura de arco-plasma se usa en soldaduras de calidad y fcilmente
pueden soldarse secciones de aluminio de 5 pig de espesor 0 secciones de acero inoxi-
Gable hasta de 4 pig de espesor. Debido a que no se forman productos de combus-
‘9p, las uniones soldadas no tienen porosidades y tienen gran resistencia a esfuerzos
altos y a cargas de impacto.
EE soplete plasma esta constituido por un electrodo centrado dentro de una caza
de metal que guia a la corriente de gas inerte su paso al electrodo. En la antorcha
= ie
™
Fig. 429. Soldadura de arco sumergide, [Cores’a de Union Carbide Corp., Linde Division |
Procesos de fobvicacién y diserio 191
arco-plasma, el extremo de la descarga de la taza es en diametro menor que el
didmetzo de la parte superior, de modo que esto forma una tobera de descarga. Ade-
ras, la pared int~.na de la tobera esta revestida con un material cerdmico.
“Aun cuando la corriente del plasma se puede crear con cualquier gas, debe usar-
se gas que no sea oxidante. Otro aspecto importante es que el gas logre tener mas que
Ja temperatura la conductividad térmica. Por lo tanto, ios gases con alta conductivi-
dad pueden transferir mis calor lograndose con esto tener con mas facilidad solda-
dduras de secciones “'yoluminosas”. Los gases mas frecuentemente usados son el ar-
‘g6n, helio y el hidrageno. El hidrogeno tiene la conductividad térmica mas alta y
produce atcos mas calientes que los producidos con argon y helio, Otras formas de
Soldadura por arco, sobre todo, arco-carbén (CAW), arco de niicieo fundente
(FCAW), arco-gas metal (GMAW), arco-gas tungsteno (GTAW), y soldadura de es-
parragos (SW) se les usa para unin de metales particulares 0 para produccion en
masa, Por cjvmplo, la soldadura por arco-carbon se le usa para unir laminas galva-
nizadas de acero, laton, bronce y aluminio, mientras que con electrodo de néicleo
fundente, con alimentacion continua desde un carrete se le usa para grandes produc-
La soldadura de espartagos se efectda mediante una pistola para el soldado de
los mismos, con la cual se solda el esparrago 0 perno a la pieza de trabajo. Este mé-
todo es muy empieado en las industrias automotriz, constructoras de barcos, ferro-
carriles y en la industria de la construccién.
Soldadura por resistencia
La soldadura por resistencia es ‘un grupo de procesos de soldadura donde la union
es producida por el calor obtenido de la resisteneia de la corriente eléctrica en un cit-
cuito en el cual la pieza de trabajo es una de las partes, y por la aplicacién de pre-
sion”. En la Fig. 4-27 se indica que hay seis tipos de procesos de soldadura por resis
tencia. Estos son: (1) soldadura de puntos por resistencia, (2) soldadura de costura
por resistencia, (3) soldadura de proyeccién por resistencia, (4) soldadura de arco
con presion, (S) soldadura de recalcado y (6) soldadura de impacto. La soldadura
por resistencia se usa mucho para producciones altas. Mediante controles y trabajo
de herramientas adecuadas puede facilmente adaptarse a la automatizacion inclu-
yendo cualquier precalentamiento requerido o tratamiento térmico después de la sol-
dadura. Los tipos de soldadura por resistencia mas utilizados son los de por puntos.
costura y de proyeccién por resistencia.
Soldadura de puntos por resistencia (RSW). "Es un proceso de soldadura por
resistencia donde la unién de las superficies de empalme* es producida en un punto
por el calor obtenido de la resistencia‘al paso de la corriente eléctrica a través de las
piezas de trabajo las cuales permanecen unidas a presién por electrodos. El tamafto
y forma de las soldaduras individualmente formadas estén limitados antes que otra
cosa por el tamaio y contorno de los electrodos” (vease la Fig. 4-30).
TTarupericie de empaime es “la superficie de an miembro, e cual etd en contacto 0 muy proximo a
182 Diseio de méiquinas— tear y préctica
Fig. 4:30 Esquema de una soldadura de punto. [Cortesia de
lavAmerican Welding Society.)
La soldadura por puntos esta restringida a metaies delgados (por ejemplo,
piezas de acero y magnesio de 0.001 a pla deespesor; de aluminio de pig de espe
Sor), principalmente acero inoxidable, aluminio, magnesio, aiquel, aleaciones de
niguel, bronce ylatGn, Con difieutades se pueden soldar por puntos metals dife-
‘Soldadura de costura por resistencia (RSEW). “Es un proceso de soldadura por
resistencia donde la union en la superficie de empalme es producida por el calor ob-
tenido dela resistencia al paso de a correnteeléctrica a través de las partes de trabajo
que permanccen unidas entre si por la presion ejercida por los electrodos. La solda-
dura resutance es una serie de traslapamientos de soldaduras de punto por resisten-
cia hecha progresivamente a lo largo de la unién producida por la rotacién de fos
tlectrodos.” En principio, fa soldadiura de costura es similar ala soldadura de pun-
to, excepto que la soldadura es continua debido ala forma circular externa de la mis-
‘ma mas que a una discontinuidad como ocurre en la soldadura de punto (véase la
ma mis 0 0 Ia soldadura de punto (véase l
La soldadura de costura se usa sobre todo para alta produccion, pero esta
restringida a la union de metales que son mas delgados que 1os tnidos por soldadura
de punto. La variacion “normal” de espesores soldados con soldadura de costura
¢s de 0.1008 $ lg
Soldadura de proveccion por resistencia (RPW). “Es un proceso de soldadura
por resistencia donde a unin es producida por el calor obtenido de la resistencia al
ete cer EN TT
Procesos de fabricacidn y diserio 198
il
Is
Fig. 431 Esquema de una soldadura de costura. [Cortesia dela
‘American Welding Society.]
paso de la corriente eléctrica, a través de las piezas de trabajo las que permanecen
tunidas a presién por los electrodos. Las soldaduras resultantes estin localizadas en
puntos predeterminados por proyecciones, relieves ¢ intersecciones.""
‘La soldadura de proyeccién es un proceso similar al de la soldadura por puntos,
excepto que las proyecciones tienden a localizar el calor, permitiendo que puedan
Soldarse piezas de mayor espesor. Con este método las soldaduras se efectiian fact
mente, obteniéndose una esiructura soldada més resistence que la obtenida con la
soldadura por puntos.
Soldadura de arco por presién (FW). En este proceso las superficies que van
a soldarse se sujetan en sostenes y se colocan muy proximas una de la otra (0 lige
Famente en contacto) de tal modo que se puede producir el arco eléctrico entre las
Superficies provocando calor hasta la temperatura de fusion. De esta manera las su-
perficies quedan unidas, completamente soldadas. Forzando entre si alas dos super
Ficies causara que el metal sea desplazado (o amontonado) hacia afuera de la union
soldada, Generalmente, este material “‘recalcado” es eliminado después de la solda-
dura. Forma parte del ciclo completo de soldadura el precalentamiento (para piezas
trandes y voluminosas).y el postcalentamiento (esto es, tratamiento térmico) de le
pieza de trabajo.
‘Los materiales que pueden soldarse facilmente por puntos también pueden sol-
darse por arco, por presion, aunque el método se usa mas comunmente con metales
ferrosos, No se tienen con este método uniones de soldadura satisfactoria para
cobre, aleaciones de cobre y algunos aluminios. Sin embargo, si se pueden tener sol
Gaduras de metales diferentes, incluyendo metales refractarios tales como cungste
‘no, molibdeno y tantalio.
194 Disefio de miquinas—tworta y prscica
Soldadra derecalado (UW), Es un proceso sinilar al desldara de arco por
presi, excepto els piers por solar permaneen en estrecho contacto un Con
ER cea iciso se erad, Porat noe dene par
je alguno en este miro, La soldaura de recaleado se usa mucho el
‘ seus mucho ent fabri
cibn de secionestubulares, tubosyanillos grandes de acer; también se le usa en
uniones pequeftas de cintas ferrosas y no ferrosas. -
Jae de impacto (PEW, Es un proxi de sldaura por cesses,
lod en prods be sper cnfnada oe
clr oe densa rote por na ecu eer cn,
yercusiones de presion aplicada durante o it
Spain ern pena rane amatuer ded
Ls soldadara de impact : °
ejemplo, ara unr metas cients auc no pueden st ceonomicamene soldados
po data dea), Exe meta dea sa i eres
00s, sprrago, trill, te oto8 components ai como tambien
‘Sodones de tuber, rdios abo a tobe o sredones planes
Soldadura con latén
La soldadura con laton’‘‘es un proceso de soldadura donde la unin es producida
por calentamiento a temperatura apropiadasy po el uso de material de aporte que
pasa a ser liquido con temperatura arriba de 800 °F (427 °C), pero menor a la tempe-
fatura de soliiicacion de los metle bsics, El material de aporte se dstbuye
Dor aracion capilar entre as superficie muy ajusadas dela union asldar. Como
se indicd en la Fig. 427, hay seis métodos de soldadura con latén, los cuales son: (1)
soldadura infrarrojo (IRB), (2) soldadura fuerte a soplete (TB), (3) soldadura fuerte
thorn (FB), (4) soldacura de induccion con 'atGn (IB), (5) soldaduraconlatOn por
resistencia (RB) y (6 soldadura fuerte por inmersin (DB). La prinipal diferencia
entre estos métodos es la forma de eémo son calentados los metaies para efectuar a
union, Sélo cuatro de los seis métodos son de importancia comercial, soldadus
Tuer a soplete, soldadura fuerte al homo, sldadura de inducion son lato y Sok
dada fuerte por inmesion. En lot siguientes pirafos se describiran brevemente
Soladhra fuerte x soplete Es un proceso de unin que puede emplear act
no, ga natural, butanoo propano, en combinacon con arew oxigen para propor.
erat aor ees ara anal deal de apo nin de
obese delta se, En ra ot mo pra predecn
Soldadarafaerte al hormo, Es un método de fabri
va Es un método de fabrcacon de ala produccién,
done alo sista po portent, Ls homos sont
caiao del tipo continuo, os calesempean bana de alambreteido para
portals peas soldadas con aon, La soladura fact l homo requere que los
Deslespetormados cone metal de pore sean coloados sobre as partes a solar.
‘mada sokdadura con lato emelen varias de relen con base de lata
enominasin ernment ls
Procesos de fabricacion y disefio 195
se antes de la entrada al horno. Este método de soldadura es muy apropiado para
grandes producciones y puede evitarse el uso de fundentes manteniendo una atmos:
fera inerte dentro del horno.
‘Soldadura de induceidn con laton, Al igual que la soldadura al horno, la solda-
dura de induceion con latén requiere de perfiles preformados del metal de aporte. El
Galor es producido colocando las piezas a soldar dentro del campo de una bobina de
induceién de alta frecuencia, Las piezas de trabajo son calentadas por corrientes pa
risitas debido a que las partes a unirse ofrecen resistencia eléctrica-magnética con
Cambio del campo de induccién. El calentamiento es muy rapido y mediante el uso
de bobinas de induccion de forma adecuada, el calor puede aplicarse en el area de la
tinign a soldar, La soldadura de induccion con laton puede usarse para produccién
mecanizada cuando se incorporan a la linea de produccidn las herramientas de dise-
ho adecuadas y 10s dispositivos de alimentacién nevesaria.
Soldadura fuerte por inmersién, Se pueden emplear dos métodos para soldadu-
ra por inmersion con laton. En la soldadura de productos quimicos las piezas a unit~
fe se preparan con metal de aporte preformado, después de lo cual éstas se colocan
curr bano con fundente derretido de laton. En el proceso de bafio con metal derre-
tido las partes ensambladas primero son preparadas con el fundente y después su-
mergidas en el bao Fundido de metal de aporte. Este ultimo método de soldadura se
plea para piezas pequetias, mientras que el primer método se adapta para uniones
de piezas grandes.
Otros procesos de soldadura
La carta maestra de procesos de soldadura (Fig. 4-27) muestra, ademas de los méto-
dos antes mencionados, una serie de técnicas de soldadura de estado solido y algu-
wos otros procesos. Estos métodos estan definidos por la American Welding Society
y 30n Jos siguientes:
‘Soldadura ultrasonica (USW). “Es un proceso de soldadura de estado s6lido
donde ia union es producida por la aplicacion local de energia vibratoria de alta fre
cuencia a medida que las partes de trabajo permanecen unidas por presion."”
Soldadura por friecion (FRW). “Es un proceso de soldadura de estado sblide
donde la union es producida por el calor obtenido por el movimiento de deslizamien-
to inducido mecanicamente entre las superficies de friecion. Las partes permanecen
‘unidas por presion.
Soldadura de forja (FOW). “Es un proceso de soldadura de estado s6lido don
de la union es producida por calentamiento y por la aplicacion de presién 0 golpes
Suficientes para causar deformacion permanente en la interfase."”
Soldadura por explosion (EXW). “Es un proceso de soldadura de estado solide
donde la unién se efectia por los movimientos de alta velocidad producidos por uns
detonacién controlada.””
Soldadura por difusion (DEFW). “Es un proceso de soldadura de estado s6lid>
donde la union de las superficies en contacto es producida por la aplicacion de pre
Sion y temperaturas clevadas. El proceso no implica deformacion macroscopica 9
movimiento relativo de partes. Puede 0 no insertarse metal solide de aporte,"”
196 Diseio de méquinas— teora y préctica
os? oct
ask.
A
Fig. 432 Tipos fundamentales de uniones soldadas. (De S, W. Bernard, £. O. Waters y C.
W. Phelps: Principles of Machine Design. The Ronald Press Company, New York, 1955.1
Procesos de fabricacién y diseio 197
Soldadura en frio (CW). “Es un proceso de soldadura de estado sélido donde la
unién es producida solamente por la aplicacion externa de una fuerza mecénica.””
Soldadura de termita (TW). ““Es un grupo de soldadura donde la union es pro-
ducida por calentamiento por un metal liquido sobrecalentado y la escoria resultant
de la reaccion quimica entre un dxido metélico y aluminio con o sin la aplicacién de
presion. El metal de aporte cuando se usa es obtenido del metal liquido.”*
Soldadura con rayo laser (LBW). “Es un proceso de soldadura donde fa union:
‘es obtenida por el calor debido a la aplicacion de un rayo coherente concentrado que
choca contra las superficies de la unién."*
‘Soldadura por induecién (IW). “Es un proceso de soldadura donde la union es
producida por el calor obtenido de la resistencia de la pieza de trabajo a la corriente
léctrica inducida con o sin la aplicacion de calor.””
‘Soldadura electroescorta (EW). “Es un proceso de soldadura donde la unién et
producida por la escoria fundente, la cual funde al metal de aporte con las superti-
ies de teabajo a soldar. Las piezas soldadas quedan protegidas por esta escoria, la
cual se mueve a {o largo de la seccion completa de la union durante el proceso de
ia soldadura. La escoria conductiva se mantiene fundida por su resistencia al paso de la
corriente eléctrica entre el electrodo y la pieza de trabajo.
‘Soldadura con rayo electrénico (EBW). “Es un proceso de soldadura donde la
union es producida por el calor obtenido de un rayo concentrado compuesto princi
palmente de electrones de alta velocidad que chocan contra la superficie a unirse."”
En la Fig. 4-32 se muestran esqueméticamente los tipos basicos de uniones sol.
dadas y la preparacién de las orilias de las placas (es decir, U simple, U doble, J
simple, ete.), necesarios para asegurar la profundidad de la soidadura para union de
las placas. En la figura también se muestran los simbolos estandar denotando cada
tipo de soldadura. En la Fig. C-1 en el Apéndice C se tiene un resumen de la no-
menclatura de la American Welding Society para simbolos de soldadura estindar
uusada para especificacion de soldaduras.
ESCUELA UNIVERSITARIA
SAAT.
SECCION 48,
Procesos secundarios de produccion
En los procesos secundarios de produccidn, en contraste con los procesos primarios
de produccién, se le quita metal a la pieza de trabajo con objeto de obtener la forma
0 configuracién deseada. Se pueden clasificar en tres categorias a los métodos use
ddos para la eliminacion del metal, los cuales son: eliminacion mediante desbaste, eli
‘minacion sin desbaste y eliminaci6n de metal mediante calor. El mas usado de estos
métodos es el de eliminacion mediante desbaste. Este emplea una herramienta endu-
recida cortante para formar (y eliminar) la viruta. Las formas* més comtnmente
tusadas de maquinado sin desbaste son: maquinado electroquimico, labrado 0 ma-
quinado quimico, maquinado mediante descargas eléctricas, rectificado electrolitico
Te renen nuevos desarrollos de maguinado sin desbat, los cuales emplean rayos laser y ultrasonic.
‘Shr enbargo, por diversas imiaciones etor metodos an se ean ampliamente
198 Diseio de méquinas—teoria y préctica
y fotoformado. La tercera forma de eliminar material emplea la flama ardiente, la
‘ual es capaz de fundir el material de la pieza de trabajo (por ejemplo, oxiacetileno,
plasma, etc.).
En las Figs. 4-33, 4-34 y 4-35 se muestran esquematicamente las diferentes ma-
neras usadas en las maquinas para eliminacion por desbaste. No se espera que el di-
sehador sea un mecinico aparatista, pero si se espera que sea capaz de disefiar las
diferentes partes de una estructura mecinica, de un sistema, etc., y por lo tanto, de-
be tener conocimientos acerca de las capacidades, tipo de herramientas cortantes y
de las limitaciones del equipo de un taller mecanico. Debido a que por limitacio-
nes de espacio no es posible el estudio o repaso de los diferentes procesos secunda-
rigs de produceion, se recomienda al lector que lea los excelentes libros de texto [por
ejemplo, la Ref. (2)] v manuales disponibles sobre este material.
Las Figs, 4-33, 4-34 y 435 son representaciones basicas porque, en casi cada tipo
de operacion, el maquinado especial o de alta produccién emplea el mismo método
bisico para el desbastado (por ejemplo, taladro a presion y taladradora radial, torn
de corriente y torno de torreta, etc.).
Maquinado electroquimico (EMO). En este proceso a la pieza de trabajo se le da
Ja forma deseada mediante la eliminacion de metal en la superficie por accién
lectroquimica. La herramienta (ctodo) se mueve hacia la pieza de trabajo (4nodo),
completandose el circuito electrolitico a través del electrolito. La rapidez de alimen-
tacion de la herramienta, el electrélito, y la densidad de la corriente, dependeran de!
material que esta siendo eliminado y del perfil final deseado. En la Fig. +36 se
muestra una operacion tipica electroquimica.
Labrado quimico (CHM). Es un proceso controlado de grabado al agua fuerte
que se le conoce también como pieza fabricada por medios quimicos, maquinado
guimico y labrado quimico. El proceso no utiliza corriente eléctrica, pero depende
de ia acci6n al grabado de un acido 0 alcali (dependiendo det material) el cual ataca
‘uniformemente todas las areas expuestas de la pieza del trabajo. Por tanto, a fin de
obtener la configuracion o perfil deseado, es necesario proteger con una cubierta (0-
ddas aquellas superticies de la pieza de trabajo que no vayan a ser grabadas al agua
fuerte. En la Fig. 4-37 se muestran algunos productos tipicos obtenidos por este pro-
cedimiento.
Maquinado por electrodescarga (EDM). Este proceso conocido también como
maquinado por electrochispa, se emplea para maquinar materiales ‘‘dificiles"” (por
ejemplo, carburos, herramientas y aceros para matrices, aleaciones resistentes al ca-
for, ete.). Se obtiene la forma de la pieza de trabajo mediante chispas eléctricas, las
cuales eliminan al metal por vaporizacién. A la herramienta se le da la forma de la
configuracion deseada. El chisporroteo se inicia cuando la herramienta formadora
esta muy proxima a la pieza de trabajo. El maquinado por descarga es un proceso
Jento y no se le usa para fines de produccién. La Fig. 4-38 es una fotografia de una
peza tipica produeida por el proceso EDM.
Esmerilado electrolitico (EGG). Llamado también esmerilado electroquimico,
es un proceso semejance al maquinado electroquimico. En este método de maquina-
do, la rueda de esmeril ¢s el catodo y la pieza de trabajo es el anodo. Aunque este
método originalmente fue creado para herramientas agudocortantes de carburo (las,
cuales por lo comiin causan un desgaste muy répido en las ruedas de diamante de es-
Procesos de fabricacién y disefio 199
—_ SSE
ree
Je avve |
wn) PO beer oer
|
reants | Goreme | nome | |
CH nine aaneara
—T Serb lt l.
o LOE. nen _|
a Ss]
Fig. 423. Eaquemas de las operaciones dela herramienta para maquinado de superficies pla.
Fe: toe €. Pani De Garmo. Meterais and Processes in Manufacturing, 38, Ed. The Mac
lian Company, New York, 1971.1
200. Diseiio de méquinas—teore y prbctics eae eee eee
a — . Fig. 4.35. Esquemas de las operaciones de la herramienta para maquinado de superficie
waver | inva | Manson temas cilndricas, [De E, Paul De Garmo: Materials and Processes in Manufacturing. 3a.
4 ‘The Macmillan Company, New York, 1971.)
T
{
Tome J, cone
_ i | rene
cme | | freer | r
moor | t arent =
me ents ( | once carne
‘mane |
“sone | |
Fa, 494 Ean co an opwraione de a hramiania care manuinado de supers
clindricasiternas, [De E, Paul De Garmo: Meteriais and Processes in Menutacturing, 3 Ed ‘
‘The Macmilan Company, Now York, ‘ Fig. 435 Maquinado electroquimice de rebabas (desrebabado electroquimico) en una bid
v7, New York, 1871.1 fe motor de'automovi. (Cortesia de Ex-Catl-O Cusporation.]
22 Diseio de miavinas~teoria y oréctica
Fig. 437 Piezas fabricacas por labrado quimico. [Cortesia de Chemeut Corporation. |
merilado utilizadas en las operaciones normales de trabajo agudo), el esmerilado
clectrotitico puede también usarse para el esmerilado de otros materiales duros. Los
resultados obtenidos por este metodo son de gran calidad (por ejemplo, se puede ob-
tener un acabado de 5-10 jplg y dimensionado dentro de 0.005 pig), y ademas son
obtenidos mas répidamente que con los métodos ordinarios de esmerilado. En la
Fig. 439 se muestra un arregio esquematico del esmerilado electrolitico de una
herramienta de core.
Fotoformado. Es un método muy parecido al labrado quimico en la eliminacién
dle metal por grabado al agua fuerte por accién quimica. Sin embargo, se diferencia
del labrado quimico en que las areas que no van a ser grabadas son protegidas por
formas que son producidas fotograficamente hasta dimensiones muy pequefias.
AAdemés el fotoformado elimina todo el metal de un area expuesta, mientras que con
cl labrado quimico se elimina el material suficiente para producir cavidades en la su-
perficie de la pieza de trabajo. El fotoformado se usa, por lo general, para mate-
‘ales relativamente delgados y se utiliza para hacer plantillas paca la fabricacion de
Procesos de fabricacién y disefio 208
Fig. 438 Maquinado de un aguiero
on anuras por el método de electro:
trowescarge. (Cortesia de Cx-Cell O
Corporation.
sransistores, circuitos impresos, detectores de deformacién, ete. En la Fig. 4-40 se
muestra el proceso secuencial del maquinado de una pieza por fotoformado.
Maquinado ultrasonico, Es un método de labrado 0 maquinado utilizado part
srabajar con materiales duros y/o fragiles. Este método emplea una herramienta de
material mas suave (acero rolado en frio, latén cobre) que la i
jeza de trabajo lx
[natn
oN
|
Fig. 4.39 Arregio esquematico pars esmeriado electric, (De &.
Pall De Germo: Materials and Processes in Manufacturing, 32. €6.
‘The Macmilan Company, New York, 1971.)
204 Disetio de maquines—teora y prictce
Fig. 440 Fotoformado, (a) La transparencia que contiene la imagen del perfil deseado es
Spcade a una hoje metélica que contiene un recubrimianto fotoresistvo. (b) La hoja es x
puesta az y an un bao subgecuente se aimina todo el material resistivo menos ol material
Eomoreeco por la imagen. (e) £1 material resistivo restantesirve como piantilaen una opera
ion de grabed af agua fuerte, la cual (d) elimina al metal no protegido para producit una
fieza con peri idéntco al dela imagen ical, [1970 Metals Reference Issue, Machine De-
Sign. Penton Publishing Co., Cleveland, Ohio.
tiene ef contorno del perfil que va a ser cortado. La herramienta esta colocada
Sobre un transductor de alta frecuencia y baja amplitud (por ejemplo, * 0.002 pig),
yoscila como se muestra en la Fig. 4-41 aproximadamente 25 000 cps (ciclos por se-
jgundo). Mientras se esta efectuando el movimiento se envia una lechada que con-
tiene particulas abrasivas, tales como carburo de silicio, carburo de boro u oxido de
‘aluminio hacia la herramienta y pieza de trabajo, para cortar la forma que tiene la
herramienta en la superficie de trabajo. La herramienta esta sujeta a algo de desgas-
te, pero es barata su reposicion.
SECCION 46
Dimensiones y dibujos en ingenieria
Los resultados obtenidos por el diseftador debe mostrarlos en un conjunto de ins-
tmucciones para el taller, con objeto de que la pieza 0 piezas se puedan fabricar y
ensamblar. Por lo tanto, se elabora un conjunto de dibujos de ingenieria donde se
indican los tamanos (a escala), formas y dimensiones de las piezas que vayan a fabri-
carse. Infortunadamente muchos disetadores no le dan importancia a esta fase del
diseno en la ingenieria, Sin embargo, hablando de manera realista, esto puede ser de
tanta importancia como la solucién en si misma del disefo.
Por el momento, considere lo que representa un dibujo de ingenieria. Esto
tituye un conjunto de instrucciones (es decir, érdenes) que les dice al aparatista de
maquinas, modelista, fundidor, etc., “hacer esta pieza de acuerdo con la informa-
cién indicada y las dimensiones especificadas, cualquier modificaci6n no autorizada
errores de fabricacion son de su responsabilidad”. Esto desde luego, es una exage
raci6n, Sin embargo, nos indica la importancia que tiene el que los dibujos de
Ingenieria sean completos y tengan las dimensiones adecuadas —responsabilidad
ue recae en el disefiador—. Un descuido en el dimensionamiento puede ocasionar
uun aumento en los costos de la produccion y/o un derroche completo como resulta.
do de los errores.
Fig. 441 Labrado ultrasonico (es
mmeriade por impacto} (a) Cabezal de
Ja maquina (bl (ev (a) Tipos rence
sentativos de productos difiaies aue
pueden producirse nor este procedi-
Iniento de fabvicacion. (b} Matrices
cncabezadoras y de estamoado de
larga duracion y cortados de tungste
ro, acero al carbura, (c) Separador
‘ceramico con multiples agujeros. id)
‘Aguieros y ranuras cortados en un
Separador Geramico por un tubo elec:
tronico. (Cortesia de Raytheon Ma
rutacturing Company.
206 Disero de maquinas—teoria y préctica
Debido al hecho de que ninguna pieza puede fabricarse a una dimensi6n “‘exac-
ta”, los dibujos de taller estan preparados de acuerdo a un sistema de tolerancias ¥
discrepancias. Muchas companias, por razon de experiencia y facilidades en sus
talleres tienen sus propias normas para el dimensionado de sus dibujos. Basaremos
nuestro estudio en la muy usada ANSI’ (American National Standards Institute)
“Preferred limits and fits for cylindrical parts” (Standard B4.1-1967) publicada por
la American Society of Mechanical Engineers (véanse Tablas C-1, C-2, C3, C-4y C-S
enel Apéndice C). En estas tablas se indican los limites impuestos sobre piezas de di-
ferente tamafo, lo que da como resultado una clase particular de ajuste entre dos
piezas apareadas. Las tablas proporcionan bases comunes para el dimensionado de
componentes para fabricacin intercambiable.
‘Cuando se requiera de ajustes mas cerrados alos indicados en la tablas, el dise-
nador deberé reducir la tolerancia de las piezas apareadas, A fin de evitar cualquier
incremento en el costo, el disetador se verd en la necesidad de recurrir al ensamble
selectivo. La idea del ensamble selectivo consiste en especificar tolerancias grandes
pata las piezas apareadas, calibrando los ajustes en pequefio, mediano y grande. Por
tanto, una flecha pequefia colocada en un agujero pequefto, una flecha mediana co-
focada en un agujero mediano y una flécha grande colocada en un agujero grande,
tendrén ajuste de igual discrepancia. Sin embargo, debe tomarse en cuenta que el
costo adicional por la compra de calibradores, asi como también la labor requerida
pata la calibracion puede ser equivalente al ahorro logrado por el ensamble selestivo.
SECCION 47
Definiciones de términos del dimensionamiento
Para entender mejor lo refecente a ajustes y tolerancias deberan comprenderse muy
bien los siguientes términos.*
Diserepancia. La discrepancia ¢s el ajuste més apretado entre piezas apareadas.
ara ajustes de interferencia la discrepancia es negativa.
“Tamaio nominal. E| tamafo nominal es la designacion empleada para fines de
identificacion general. Por ejemplo, un tubo de diametro nominal 2+ pig tiene real-
mente un diametro de 2.875 ple.
“Tolerancia. Una tolerancia ¢s la variacién total permitida en el tamano de una
pieza,
‘Tamafio bisieo, El tamaiio basico es aquel tamafo para lo cual los limites del
tamafio son derivados por la aplicacion de discrepancias y tolerancias.
‘Tolerancia unilateral. La tolerancia unilateral es un sistema de dimensionamien-
to donde la tolerancia (es decir, la variacién) es indicada en solo una direccion con
respecto al tamafo nominal. Con tolerancia unilateral se admite el cambio de tole-
rancia en al agujero o en la flecha sin afectar seriamente al ajuste (véase la Fig. 4-42).
* La ANSI aniguamenteconosida como la United States Standards laste (USASI)y antes de e30 fue
conociéa como fa American Standards Assriaion (ASA),
NI sino slo os necesarios para entender las espesfea-
* Eata lita ninety todos los terminos
clones de suse tolerania.
Procasos de fabricacién y diseio 207
" anon
a
} mc
a
{=
{4 7 ij LU
pe ESS
eT wai a ie
——
Fig. 442 Sjemplo de tres sistemas de dimersionamiento, La tenden:
cia #3 adoptar como sistema preferente al dimensionamiento fmite.
‘Tolerancia bilateral. La tolerancia bilateral es un sistema de dimensionamiento
donde la tolerancia (es decir, la variacién) es dividida y se indica a ambos lados det
tamafio nominal (véase la Fig. 4-42).
Dimensionamiento limite. El dimensionamiento limite es un sistema de dimen-
sionamiento donde solo se indican las dimensiones maxima y minima, Por tanto, la
tolerancia es la diferencia entre esas dos dimensiones. Hay dos métodos para desig
nar dimensiones limite, los cuales se consideran estindar. Uno de éstos es el método
de material maximo en el cual la dimension mayor es colocada por encima de la di
mension menor para las piezas macho y al inverso para las piezas hembra. Este mé-
todo es muy adecuado para lotes de cantidades pequefias porque resulta facil que et
‘operario mismo pueda verificar las dimensiones de las piezas. Al hacerlo, podré ve
rificar iniciaimente la dimension mayor de la pieza macho y la dimension menor de
la pieza hembra, El otro método es el método de material minimo el cual es prefe
rido por los departamentos de produccion y control de calidad. En este método la
designacion del niimero mayor se coloca siempre encima de! nimero menor indepen-
dientemente de que la pieza sea macho o hembra.
"Ajuste por juego. El ajuste por juego 0 por espacio muerto tiene limites en cuan-
to a su magnitud teniéndose siempre juego entre dos piezas apareadas en un en-
samble (véanse las Figs. 4-43a yb).
‘Ajuste por interferencia. El ajuste por interferencia tiene limites en cuanto a su
magnitud teniéndose siempre interferencia entre dos piezas apareadas en un en.
samble (véanze las Figs. 4-43¢ y 4),
208 Disefio de méquinasteora y préctca
women
ean
Fig. 443 Las rapresentaciones mostradas estin de acuerdo con al sis:
tema aguiero 68sco. (a) y(b) Ajuste del juego usando las dimensiones
limites de a Fig. 442. (e) y (d) Alustes de interferencia maximo y
minimo besados an las dimensiones mostrades, Para efecto de inter-
tambiabilidad debe haber juego ante as pezas cuando estén en la con:
dicién de material maximo (MMC), como en (a). La interferencia entre
los piazte eat cimensionads sobra ‘a nace cela condicién de material
rinimo (LMC), coma en [el
Procesos de fabricacién y disefio 208
juste de transicin. El ajuste de transicién tiene limites en cuanto a su magni-
tud, pudiendo tenerse juego o interferencia entre dos piezas apareadas en un en-
samble (véase la Fig. 4-43¢).
Sistema de agujero basico, El sistema de agujero basico es un sistema de ajuste,
cen el cual el didmetro de la flecha se obtiene restando la discrepancia del diametro
del agujero que se considera es el basico. El agujero basico es el sistema preferido
porque puede ser usado para taladrado, escariado, mandrilado, calibracién cilindri-
drica, ete., y las flechas podran facilmente maquinarse al ajuste indicado.
Sistema de flecha basico. El sistema de flecha basico es un sistema de ajustes en
el cual el didmetro del agujero se abtiene sumando la discrepancia al diametro de la
fecha que se considera es el basico (normalmente las oficinas de disefo prefieren el
sistema de agujero basico por el sistema de herramientas estandar y por el hecho de
aque las tolerancias estan basadas en el sistema de agujero basico. Sin embargo, el
uso del sistema de agujero basico tiene la gran ventaja de que es posible utilizar una
flecha de tamafio estindar),
SECCION 48
Clases de ajustes
Como se indicé en la Sec. 4-6, la norma B4.1-1967 de la ANSI "‘Limites preferentes
¥ ajustes para partes cilindricas”” es muy usada para establecer las tolerencias paras
las diferentes clases de ajustes. Las letras simbolos que se usan en esta norma
(Tablas C-1, C-2, C-3 Cy C-5 en ef Apéndice C) representan las siguientes clases:?
RC (ajuste de rotacion libre), LC (ajuste por juego localizado), LT (ajuste de transi
cién) LN (ajuste por interferencia) y FN (ajuste por fuerza o por contraccién).
Ajustas de rotaci6n libre
Los ajustes de rotacién libre (Tabla C-1, Apéndice C) estipulan ta ejecucion det fun-
ionamiento con la lubricacion apropiada para toda la gama de tamafos. El juego 0
espacio muerto para las dos primeras clases, se les usa principalmente como ajuste
de correderas, se aumenta mas despacio con el didmetro que para con las otras cla
ses, con el fin de mantener la ubicacion exacta aun a expensas del movimiento libre
relativo. Hay nueve tipos de ajustes RC definidos como sigue.
RCI. Ajustes apretados de corredera, ge pretende ubicar exactamente a las par-
tes debiendo ensamblarse sin mostrar juego perceptible.
RC2. Ajustes de corredera, se pretende tener ubicacion exacta pero con juego
maximo mayor que para la clase RCI. Las piezas construidas con este
ajuste se mueven y giran fécilmente, pero no giran con libertad y'en pie
zas largas, pueden apretarse con pequetios cambios de temperatura.
TEeeas leas simbolos (RC, LC, ee), 90 se ulizan en os dlbujos par abriacion ero com esto se pre
tendeorientar a dietaor para ue seleccioneconssentemente is tolerancis de acuerdo a as necesida-
tes de ise, Otros simbolos tales como HS, #4 (HS), H6hS, et, estan de acuerdo al sistema Amer
fan, Brith, Canadian (ABO)
210. Disero de miquines—teorle y arbctice
a
Fig. 4-44 Representacion grifica de los ajustes de ro
racin libe.
C3. Ajustes de rotacién precisa, son los ajustes mas apretados que pueden es-
perarse para giro libre, se les usa en trabajos de presion con velocidades
pequefias y cargas de presion ligeras. Sin embargo, éstos no son adecua-
dos cuando se tienen cambios apreciables de temperatura.
C4. Ajustes de rotacion apretado, se les usa principalmente en maquinaria de
precision con velocidades y presiones de carga moderadas donde se desea
tener juego minimo y ubicacion exacta.
RCSy RCS. Ajustes de rotacion medios, se les usa para velocidades de rotacién
altas 0 presiones de carga altas o ambas condiciones.
RC7. Ajustes de rotacién libre, se les usa donde la exactitud no es esencial 0
donde se tienen grandes variaciones de temperatura o para ambas condi-
ciones de operacién.
RCB y RCI. Ajustes de rotacién holgada, se ies usa con materiales tales como
flechas y tuberias roladas en caliente que estan fabricadas de acuerdo-a
las tolerancias comerciales.
En la Fig. 4-44 se tiene la representacion grafica de los ajustes RC.
Ajustes por juego 0 espacio muerto
Los ajustes por juego (Tablas C-2, C-3 y C-4, Apéndice C) estan formulados para de-
terminar solamente la colocacion de las partes apareadas; éstas podran dar lugar a
colocacion rigida o exacta, de acuerdo al ajuste por interferencia, aia libertad de co-
Jocacion, como a los ajustes del juego por espacio libre. De acuerdo a lo anterior, se
dividen en tres grupos: ajustes por juego localizado, ajustes de transicién y ajustes
por interferencia. Estos ajustes son descritos a continuacion,
LC. Ajustes por juego localizado (véase la Tabla C-2, Apéndice C) se emplean
‘en piezas normalmente fijas que se pueden ensamblar o desensambiar libre-
mente. Puede usarse desde en piezas de buen ajuste que requieran exactitud
en su colocacion con ajuste de juego medio, con piezas tales como espigas
hasta ajustes flojos con sujetadores donde la libertad de ensamble es muy
importante.
LT. Ajustes de transicién (Tabla C-3, Apéndice C) constituyen una tran:
Procesos de fabricacién y disevio 217
cidn entre los ajustes por juego localizado ¢ interferencia para aplicaciones
donde la exactitud de colocacién es importante, pero que permiten tener
juego pequefio o interferencia,
LN, Ajustes por interferencia (Tabla C4, Apéndice C) se usan donde la exacti-
tud de colocacién es muy importante y para piezas que requieran alineacion
de acuerdo a requisitos especiales por presion tenida en el agujero. Estos
ajustes no son adecuadas para partes diseftadas para transmitir cargas fric-
cionales de una a otra parte debido a lo apretado del ajuste, maxime cuando
se tienen ajustes por fuerza en las partes ensambladas.
En las Figs. 4-45a, b y c, se muestrau respevtivamente los ajustes por juegos de
ransicion ¢ interferencia.
{eee
|
“eee _ Mee
ea a
Fig. 4.45 Representacién grafica de (a) ajustes
ior juego localizado, (b) ajustes de tansicion, y
Fe) ajustes por interferenca
1212 Disco de miquinas tear y préctica
Ajustes por fuerza
Conan por fuera Fi. C5, Apne © tes or conan consyn
aa rede capatant ene ager atraves dela vatiacon de tamaos. Pr fo
ae ove casempes vara dregamentcon el damero ya diferencia
ego’ manimo e petusta pero maniene la pein resulkane
sae nts aronabon Hay cinco pos de jue por fuerza, desis come sr
gue:
FNL. Ajuste ligero para impulsién, son aquellos que requieren de poca presion
para su ensamble y producen ensambles mas o menos permanentes. Estos
‘justes son apropiados para secciones delgadas o para piezas largas 0 pa-
ra usarse con partes externas de hierro vaciado.
FN2, Ajuste medio para impulsién, son apropiados para partes de acero ordi-
nario 0 para ajustes de contraccion en secciones ligeras. Con esto se tiene
tf ajuste mas apretado que puede usarse con piezas exteriores de hierro
vaciado,
FN3, Ajuste fuerte para impulsidn, son apropiados para piezas pesadas de ace
0 0 por ajuste por contraccion en secciones medias.
FN4 y FNS. Ajuste de fuerza, son apropiados para piezas que puedan estar su
jetas a esfuerzo elevado 0 por ajuste por contraccién donde las fuerzas de
presion Tuerte no son précticas.
En la Fig, 4-46 se tiene la representacion grafica de ajustes de fuerza 0 por
Fig. 446 Representacion gréfica de
ajustes de fuerza 0 por contraccin.
SECCION 49
Tolerancias selectivas
Las tolerancias selectivas no son un proceso aleatorio. Requiere de juicio cuidadoso
‘basado en calculos de disefio, faclidades de la produccion y costo. Como una regia,
las tolerancias deben ser tan grandes como sean posibles porque por lo general éstas
determinan el método de fabricacion y, por lo mismo, tienen un efecto muy marca~
do en el costo de la produccién. En la Fig. 447 se muestra claramente este aspecto
donde se observa con claridad que a medida que disminuye la tolerancia, se aumenta
Procesos de fabricacién y disefo 213
| ESCUE
7 POLITECNICS 5 .
{ BIBL'C
de
i Fig. 447 Costo relativo de I» produc
i
PS=|
NO seen
282 Diserio de miquinas teoria y prbctica
no de simetria y el plano xy es la superficie neutra antes dela deflexidn. Sino se tiene
torsion a lo largo det eje longitudinal, las fuerzas pueden aplicarse en el plano de
simetria y los vectores de momento pueden aplicarse perpendiculares al pla-
no de simetria, Entonces el (originalmente recto) eje longitudinal se deflexionara
junto con el plano de simetria, Predominaran los efectos flexionantes y podrén apli-
‘carse las suposiciones de la teoria de vigas.
Considérese una seccién plana perpendicular al je de un miembro. Si esa sec-
cion permanece plana y perpendicular al eje (deformado) longitudinal, entonces se
podra determinar facilmente el campo de esfuerzos en dicho miembro. En la Fig. 5-5
(Pag. 243) el esfuerzo flexionante 0, esté relacionado con la segunda derivada de
Ja deflexion w, mientras que en la Fig. 5-6, el momento flexionante M esta relaciona-
ddo a la misma cantidad. Combinando los resultados, obtenemos
52)
teniéndose el esfuerzo maximo en la superficie z = c donde
(53)
ig. 56 Esfusrz0 debido a flex.
Momento resutante
donde
En esta figura, la flexién es producida por un momento positive, mientras
que en la figura anterior et valor de awd! era postive.
Anbhsis de estuorzo y desplazamiento 263
Este valor del esfuerzo puede ser la base para el diseflo cuando el momento fle-
xionante se calcula a partir del sistema de cargas. En la Sec. 5-5 se hace la determina
cidn del momento flexionante debido a varias formas de carga lateral.
ara una seccién transversal rectangular ¢ = h/2e = bh?/12. Por tanto
3a)
Para seccidn transversal circular | = xD*/64 y
M
xen = DF
b)
Los resultados anteriores suponen elasticidad lineal, es decir, a, , no excede el
mite de proporcionalidad, Ademés, estas resultados estén basados en la suposicion
de que el esfuerzo es independiente de la coordenada y y que en la direccién y el es-
fuerzo , = 0. Estas condiciones se cumplen si las cargas estén aplicadas en el plano
axial de simetria, Si la dimension 6 es pequefta comparada con la longitud del
‘miembro y silos esfuerzos calculados son menores al esfuerzo de cedencia del mate
rial. En el Cap. 18 se hace el andlisis de vigas que tiene curvatura inicial muy grande.
Sect
‘Algunos miembros de maquinas son hechos en la forma de T 0 I, o secciones trans~
vversales de canal. En ciertos casos, el centro de gravedad de la seecion transversal no
puede obtenerse por simple observacion. Por ejemplo, considérese la seccin T de la
Fig. $-Ta, con cargas en el plano de simetria (el plano vertical). En general, la distan-
cia desde alguna referencia arbitraria hasta el centro de gravedad para cualquier sec-
cion transversal esta dada por
snes compuestas-centro de gravedad
dA
faa
6-4)
la integracion se efectia sobre el area completa A. Tanto z' como @ son medidas
desde la distancia arbitraria, la cual podria ser por ejemplo, fa parte superior de la
seccién.
Cuando resulte conveniente separar la seccidn transversal en dos 0 mas partes,
la expresion para la localizacién del centro de gravedad puede estar dada en térmi-
rnos de cada una de las areas individuals y de las distancias desde la referencia ar
bitraria hasta cada uno de los centros de gravedad. Por ejemplo, el centro de grave
dad de la seccién T en la Fig. 5-7b se obtiene por la ecuacién
Utilizando las dimensiones de la Fig. $-7b, obtenemos F = 0.77 pla.
264 Disetio de miquinasteorle y prbctica
| | come
pel |
( WYO aa
MY
Fig. 57 Flexi6n de una seccién compuesta. (al Seccién T con cargas en of plano do
Simetria. (b) Locaizacion del centro de gravedad. (c) Momento de inecis,
Momento de inercia para secciones compuestas
En general, el momento de inercia de una seccién transversal esta dado por
Pda
Para miembros de maquina en flexi6n, estamos interesados en el momento de iner~
cia con respecto al eje neutro —por ejemplo, el eje horizontal a través del ceniro de
‘gravedad G en la Fig. 5-Te—. El momento de inercia de una seccién compuesta a través
de su eje neutro puede estar expresado como la suma de los momentos de inercia de
sus componentes a través del eje. Ademas, ef momento de inercia de cada area com-
Andis de estuerzo y desplezamiento 265
ponente puede estar expresado como la suma de los momentos de inercia T, de cada
rea con respecto a un eje que pasa a través de su centro de gravedad paralelo al eje
outro mas el efecto de transferit Ad?, donde A es el area individual y d es la distan-
tha desde el eje neutro hasta el centro de gravedad del area. Entonces el momento t0-
tal de inercia con respecto al eje neutro esta dado por
Ell + Ad?) 65)
se hace Ia suma de todas las areas que componen la secci6n, Para la section T mos-
trada en la Fig. 5-7, encontramos que / = 0.291 plg*
En este ejemplo, 1s esfuerzos flexionantes en las fibras extremas (superior ¢ in-
ferior) no son iguales. E? esfuerzo normal en la parte superior es
Mer
7
donde C, = 0.72 plg y en la parte inferior
Mes
a2
donde ¢; = 1.28 pls. Uno de los esfuerzos sera de tension y ¢l otro de compresion,
dependiendo de las cargas y soporte.
‘Cuando un miembro esté cargado en un plano vertical de simetria y el plano ho-
rizontal también es simétrico, el plano horizontal de simetria forma la superficie
heutra (el eje neutro esté sobre la seccién transversal) y puede ser localizado por
imple observacion, En muchos casos, podemos tomar ventaja de la simetria en lt
determinacion del momento de inercia. Por ejemplo, en la Sec. 5-8, notamos que el
en
Fig. &8 Seccién | con patines iguales.
285 Diseho de méquinas—teoria y préctica
momento de inercia de la seccién I con patines iguates es igual al momento de inercia
del rectangulo exterior menos el momento de inercia del rectangulo del hueco.
i 4
2
fio
Debido a que las secciones estundar de acero laminado en realidad no son de formas
rectangulares, el valor exacto de f se obtiene de las tablas proporcionadas por el
fabricante,
Principio de St. Venant
En efecto, el principio de St. Venant establece que el esfuerzo y la deflexién de un
miembro en puntos suficientemente distantes de los puntos de aplicacion de las car-
‘gas pueden ser obtenidos sobre la base de un sistema de cargas estaticamente equiva
lentes. De modo que podremos resolver muchos problemas sin considerar un rigor
‘excesivo, Por ejemplo, para el caso de cargas en engranes y reacciones en baieros las
cuales estin distribuidas sobre un area pequeta de modo que las cargas actiian en
puntos, podremos entonees analizar el esfuerzo y la deflexion en flechas. Obviamen-
fe, debemos de tener cuidado con la aplicacion de esta simplificacion, en particular
cuando nuestro interés esté en la determinacién del esfuerzo. Como un ejemplo
‘extremo de aplicaci6n inadecuada, considérese una varilla esbelta sujeta a una carga
de tension P en cada extremo, Si cambian las direcciones de las fuerzas en cada
extremo, pudiera pensarse que al sistema de fuerza es estaticamente equivalente al
primer caso, pero notamos que la situacidn de esfuerzo no es la misma, aunque para
caso primero se tenga seguridad en la pieza, en el segundo caso pudiera ser insegu-
+0 sobre la base de estabilidad elastica.
Un problema elemental de di
Considérese el caso del diseato de la palanca de una lave de trinquete (Fig. 5-9). Hay
‘muchas decisiones que hacer para su disefo, y se pueden aceptar muchos posibles di-
sefios. La longitud de la palanca esta basada en el par de torsion necesario para el
apriete. Sea el par requerido igual a Pe, donde e es la distancia desde el centro det
‘cuadro hasta la linea de accién de la fuerza resultante aproximada P aplicada por
luna persona. La secci6n transversal de la palanca de la llave podra basarse para el
‘caso de que la carga que se aplique sea ligera. Sin embargo, al destornillar tornillos
moliosos, no es raro extender la palanca de la llave colocando un pedazo de tubo en
la misma, aumentandose asi el brazo de palanca, o golpear la palanca con un mar-
tillo. Aunque no podemos diseftar una llave ‘irrompible”, deberemos basar nuestro
diseno en el peor sistema de carga que razonablemente sea esperado.
Permitasenos especificar una seccion I para la palanca dela llave y supongamos
aque et punto critico (el de mayor esfuerzo) esti en la seccion A. El momentoen dicho
punto es M, = Pa donde se usa un valor mayor de P que el necesario para apretar.
‘Como una primera aproximacion del momento de inercia con respecto al eje neutro
fen flexion podemos despreciar la contribucion det alma y considerar solamente el
efecto de los patines con respecto a sus eyes centrales Entonces simplemente se
Andlsis de estuerzo y desplazemnionto 267
J
4
Fig. $9 Palanca de lave de trinquete.
tendra J = 2bhd?, y el estuerzo de tension maximo sobre la fibra extrema en la sec:
ion Aes
ad
Bhd (5-5)
Sea, igual al esfuerzo de trabajo 7, = S,,/N, donde S,, ¢s el esfuerzo en el punto
de cedencia det material seleccionado y N es el factor Ge seguridad. Probablements
se seleccione un material ductil para el disefto, en cuyo caso la primera evidencia de
falla pudiera ser por cedencia. Si esto ocurriera no seria de gran peligro para el ope
rador, por lo que resulta adecuado tener un factor de seguridad bajo.
'A fin de completar el problema del disefo de Ia seccién, podemos reducir el nt-
mero de incognitas mediante relaciones arbitrarias que hagamos entre las dimer-
siones de la seccion. Tendremos entonces una sola ecuacién con una sola dimension
de incognita por resolver. La palanca puede ser ahusada hasta una seccién mencr
cerca del extremo donde se aplica la fuerza P, dado que el esfuerzo de trabajo para
dicho punto est muy sobrado.
‘Como ejemplo, supéngase que la longitud total de la palanca sea de 11 pig y la
distancia desde donde se aplica la fuerza hasta la seccion critica es de 7 plg. La fuer~
za aplicada podria estar distribuida en una parte dela palanca cerca del extremo. Sin
‘embargo, de acuerdo al principio de St, Venant suponemos un punto de carga cerca
1288 Diseio de mAquinas-—tearta y préctica
del centro de la carga distribuida porque la secci6n critica esta cierta distancia de la
carga aplicada
Permitasenos especificar arbitrariamente as proporciones de la secci6n A (Fig
5.9) por las relaciones b = 4hyd = 4h. Suponiendo que una persona aplique una
fuerza méxima de 100—150Ib a la palanca dela llave, debemos hacer un diseflo para
tuna fuerza P = 300 Ib tomando en cuenta impactos o mal uso. Supéngase que ls pieza
sea de acero con esfuerzo de cedencia S,, = 75.000 Ib/pig® y debido a que en caso
de falla no se tendrian serias consecuencias, se puede usar un factor de seguridad
N= 1s.
Entonces, usando la Ee. 5-6 tendremos,
75.000 lb/plg __ (300 1bN7 plgy(4.5h play
1S 2(Gh plan play($h ple)*
para lo cual A = 0.114 pig. Redondeando nimeros, podemos usar alma de espesor
de £ pg y hacer la seccion I de los patines de + pig de ancho por ¢ pig de profundi
dad, Hasta este punto, podriamos verificar el disefo calculando el momento de iner-
“vexacto” basado en las dimensiones finales. Sin embargo, esto no es necesario,
ya que los cdlculos aproximados fueron conservadores (es decir, dentro del lado se-
ur0)
SECCION 55
Deflexion de miembros de maquinas debido a flexion
Los miemros de méquinas generalmente estin sujetos a cargas que pueden repre
sentarse por fuerzas y momentos. Las cargas disiribuidas, en especial aqueltas pro-
venientes de la masa de un miembro son de poca importancia en el diseno de ma-
{quinas, Las cargas inerciales son una excepci6n y, desde luego que en el caso de es-
tructuras grandes pueden quedar sujetas a cargas distribuidas importantes.
En los textos de resistencia de materiales (Refs. (2), {3] y (4) se trata con detalle
las relaciones que existen entre las cargas que actian en el miembro de una maquina
yla deflexion que se tienen debido a la flexion. En la Fig. 5-10 se da un resumen de
resultados con las convenciones de signos utilizados.
‘Como una aplicacién de las expresiones de la Fig. $-10, se va a determinar la
deflexion por flexion en la parte horizontal del miembro de maquinas mostrado en
la Fig. 5-11, Sea una carga de 707 Ib aplicada en el punto £ tal como se muestra, El
‘miembro esta simplemente apoyaco en los puntos B y C: el apoyo B resiste el com
ponente horizontal de la carga P.
‘Ademés, la carga P causa un momento Mlexionante de 1500 Ib-pig y una fuerza
vertical de $00 Ib en el punto A. En la Fig, 5-12 se muestra la solucion de este proble
ma. Despreciando el peso del miembro, la reaccién R, se obtiene igualando a cero la
suma de momento con respecto al apoyo C. Se puede ahora plantear la ecuacién de
equilibrio de fuerzas verticales y construir los diagramas de corte y momentos fle-
ionantes. La curvatura esta dada por
St on
Andlisis de estuerzo y desplazamiento 269
Se
(-
Secreta ra en
Fig. 5:10 Convencién de signos y rlaciones entre cargas y deflexiones,
no serd necesario hacer un trazo adicional si £ e [son constantes. Si atin no han sido
especificadas las dimensiones de la secci6n, la deflexion variable E/w puede obtenes-
se integrando dos veces con respecto a x. Las constantes de integracién son determi-
hadas manteniendo continuidad de la pendiente y la deflexion y haciendo igual a ce
to las deflexiones en los puntos B y C.
‘Aun cuando la curva de pendiente variable en la Fig. $-12 fue obtenida anali-
ticamente, mediante integracion grafica se obtendrian resultados idénticos. Si os ¢e-
sultados van a servir de base para un diseno real, se recomienda que el problema sea
resuelto tanto analitica como graficamente y comparar las soluciones.
Si deseamos obtener de un modo grAfico la solucién, empezando con la pen-
diente, podemos temporalmente hacer 0, = 0. Después integramos grificamente,
‘usando la regla del trapecio, En este problema, con incrementos de { pla en xe pro
dducen resultados compatibies con la ““exactitud en ingenieria’". En la Fig. 5-13 5
1270 Disero de maquinasteoria y préctica
oe
Fig. 5-11 Miembro de maquins sujto a cargas flexionantes,
muestra el trazo resultante, Debido a que el parimetzo depreciado, #4, es una cons-
tante, su integral 8x es una linea recta, Entonees, para obtener la linea w = 0, tra~
zaamos una linea recta que interseca a la curva Elw en los puntos de apoyo By C. El
verdadero desplazamiento variable esta dado por la distancia vertical desde la linea
w= Oy la curva Elw.
‘Ahora podra obtenerse la pendiente 0, localizando el punto donde dw/dx = 0
sobre la curva Elw, Se traza una linea paraiela ala linea w = Oy tangente ala curva
Elw. E] punto de tangencia sera el punto de pendiente cero. Se podré ahora obtener
fa dimension de la pendiente proyectando esta localizacién hacia arriba de la curva
E13
‘Superposicion
Casi todos Jos problemas de ‘lexién en miembros de maquinas pueden considerarse
como problemas lineales, Debido a que las reacciones y la fuerza de corte son pro-
porcionales a las cargas, vemos de la Fig, 5-10, que el momento, pendiente y defle-
xién son funciones lineales de la carga aplicada (suponiendo desde luego que son
vAlidas las suposiciones usuales, elasticidad lineal, pendientes pequefias, etc.). En-
tonees el efecto combinado de dos o mas cargas actuando simultaneamente, estara
dado por la suma de los efectos de cada carga por separado. La ultima frase es la
declaracion del principio de superposici6n, La superposicién es una técnica muy va~
liosa para resolver problemas tanto estaticamente indeterminados como determina-
dos cuando actéan dos o més cargas en un miembro.
Por conveniencia para la solucion de tales problemas, empezaremos colectando un
conjunte de soluciones de problemas basicos estaticamente determinados (Fig. 5-14).
En estos problemas se determina por estatica el valor de las reacciones (es decir, por
Andis de ase despazamieto. 271 |
(tas ; +
fee eae eee eee
Fig. 12 Cargas y defiexiones de un miembro de maquina,
relaciones de equilibrio). Ya que las dimensiones se expresan en términos generales,
Jas soluciones de estos problemas pueden obtenerse analiticamente.
‘Como un ejemplo de superposicion, considérese et miembro de una maquina
representado en la Fig. 5-15, El médulo elastico y e! momento de inercia de la parte
AB son E,¢ J, ¥ los de la parte BC son E,¢ J. La fuerza aplicada F esta en el planc
‘ABC. La union en B es rigida de modo que el momento M y la pendiente 8 son con-
tinuos en dicha parte
272. Diserio de méquinas—teorle y préctice
os 7 t——». | .
“ 7" pa S-
Fig. 5-13 Solucién grfica para cal.
cular la penciente 1a detlexion en o
plano verveal. (a) Pendiente, (b)
Deflexion.
Fig. 514 Detlexién de miembros con seccién transversal constante (véase también la si-
_guiente pagina)
Por convenir en la solucién de este problema, la fuerza Fes reemplazada por sus
componentes horizontal y vertical. El problema se resuelve superponiendo las pen-
dientes y deflexiones dadas en las Figs. 5-I4a y b. Para evitar ambiguedades, los
indices y ejes de coordenadas seran cambiados cuando sea necesario,
El esfuerzo por flexi6n alcanza su valor maximo Mc/I en la fibra extrema de
tuna seecion transversal dada. A este valor, se le agrega el esfuerzo de tensién direc
to, En la parte 1, la magnitud del momento flexionante puede ser maxima en A 0
2m
wo de 1s—teod y préctica | Andlisis de estuerzo y desplazamiento 275
Sy
{eet
FysPeng
ee ee
eH A
Fythd— Feed
| ectheey 288 aR
se) rally tet Ath
Fig. 5:15 Superposicion
en B dependiendo de la direccion de F. El esfuerzo de tension maximo esta dado por
mes0c 18ers Ja suma del esfuerzo por flexion y fa tension directa,
og, = Mbt 4
ima pe
En la parte BC, My = FL, ¢s obviamente el valor maximo y el esfuerzo de ten-
sign correspondiente es
[>
Fig. 514. {continuacionl .
|
Fatma =
»
1276 Diseio de maquinas—teoria y préctice
Los resultados estn basados en la suposiciOn de que la pendiente 0 en cualquier
parte es pequeta comparada con | rad. Sino se cumpie esta condicién, las cargas de-
Penderan entonces dela deflexion. En el ejemplo antes descrito, la carga axial fue de
Pension, Cuando ocurre carga de compresion debemos analizar el problema por esta-
bilidad elastica para estar seguros que no ocurra falla por pandeo.
Problemas astaticamante indeterminados en flexién
Enos ejemplos anteriores, las reacciones en los apoyos se calcularon usando las ecua
clones de equilibrio. Un miembro de maquina con un extremo empotrado y el otro
Como apoyo simple en cualquier punto del mismo (Fig. 5-16a) es estiticamente inde-
erminado es decir, que las ecuiaciones de equilibrio no son suficientes para calcular
Jas reacciones en los apoyos
Fig. 5-16 Miombro estaticamente indeterminado (apoyo extemo redundante)
Este problema se resuelve superponiiendo los efectos de la carga P sola (sin ta reac
cion Ry a los efect sola (sin la carga P),
La deflexion en C debido a la carga P (Fig. 5-160) es
PLL, | L3|
Ble 3)
Anélisis de estuerzo y desplazamiento 277
asad des couacones dada en In Fig 4 con lo cambios neces en lot sie
jolos. Andlogamente para el mismo punto cuando actia la reaccién R, (Fig. S-
ane (Fig. 5-160),
ESCUELA UNIV!
Fig. 5:17 Miemco estéticamente indeterminado en tres apovos.
‘278 Diseho de méquinas—teoria y préctica
Superponiendo los dos efectos, aplicamos la condicion
o
= tM
para obtener la reaccidn Ren el apoyo. Usilizando este valor de Ry las eeuaciones
be la Fig. 5-14f obtendremos la deflexion y la pendiente en cualauier punto
‘Pare obtener el punto de maxima deflexion, ése se obtiene calculando la deriva
da con respecto a ¥ de la ecuacion de la deflexion y su_ valor se hace igual a cero, Pa
tala parte de Ba C (Fig. 5-16a) la deflexion maxima ocurre a
Si por ejemplo, la carga Pes equdistante de A y C, entonces R= 5/16Py el esfner-
seer comante maximo ocurre en A donde el momento esta dado por M, = — %PL.
Pata ese caso, la deflexion maxima ocurre en x = 1.106L,. En general, ¢s posible
rivificar cada parte de un problema dado. Las soluciones que ocurran fuera de las
partes que estan verficandose se rechazan, ¥ se examinan los valores de las defie-
iones en los puntos finales de cada parte.
La golucion es sinlar para el caso de un miembro que estd en tres apoyos, Fig. 5-17
(pag, 253). En este caso, superponemos los efectos de ia carga P (sin la reaccién in-
ermedia) sobre los efectos de fa reaccion intermedia sola considerada como una car-
fi Estos valores pueden obtenerse de Ia Fig. S-ldc. La magnitud de ia reaceion se
siriene considerando que et desplazamiento de la reaccion es igual a cero. En las
partes by cde la Fig, 5-17 se ustra la superposicion, Debido a que la deflexion ver
dadera Wy = Wy — 5 = 0, tenemos
Para el caso especial de dos claros iguales con cargas P en el punto medio de <
a claro la reaccion en el centro es R, = 4 P. En este caso el momento flexionante
maximo, M = PL, ocurre en el punto de aplicacion de la carga P
SECCION SS
Esfuerzo de corte y deflexién por corte debido
a cargas laterales—centro de corte
Los esfuerzos y deflexiones por flexion por lo general son los parametros mas im-
portantes en el diseto de miembros de maquinas sujetos a cargas laterales, Sis oy-
Fargo, algunas veces también son importantes los esfuerzos de corte y las defle-
iones por corte debidos a fuerza de corte lateral.
‘Condidérase un miembro de una maquina que esta sujeto a cargas laterales que
aceian en el plano de simetria del mismo (Fig. 5-18). En la misma direcci6n x el mo-
Ansiisis de estuerzo y desplezamiento 278
ESCUELA
POLITECI
Fig. 618. etueno de corte debi
i 9 caren itera
Inbred masuna con caren tre, 0 uscd ora
tbr selon tans Derbucones el momento
Sct fl eno dla rz
mento flexionante tiene un valor M, con una
ee i lor M, distribucién lineal del esfuerzo axial
6.8)
donde: mato apart ra, Movin ai der ait
iy, momento segments ca (2M) deo ¥ dey el esfucan ail wae
en [(V dx)z|/I donde V es la fuerza de corte. aise :
‘bora comidtest el eemento aaj del ee neuro a
El estuerzo de corte transversal ALR
fen la parte de arriba de! elemento produce la
1280. Disefo de miquinas—teorie y préctice
fuerza de corte f,, b dx la cual queda balanceada por la fuerza neta de tension.
Resolviendo para el esfuerzo de corte transversal, obtenemos
v
bi
donde dA es un elemento de Area de la secciOn transversal y b es el ancho de la sec-
Sion normal a la pagina az = z,, que es donde queremos obtener ‘,,. El estuerz0
Gecorte 7, = Oaz = £c, enasfibras mas alejadas del eje neutro. El valor méxi-
mo ocurre en el eje neutro.
5.10)
ara una seccién transversal rectangular de area A, dA = b dz yla ecuacion det
sh]
elvaior maximo es 1,5V/A. Para una flecha circular solida, e1esfuer20 maximo por
Sone transversal es 4 V/A, y para una seccidn [con carga usual (es decir, cargas re-
Sultantes a través del plano del alma), el esfuerzo de corte transversal en cualquier
parte del alma puede aproximarse al valor de la fuerza de corte V dividida entre el
Area del alma.
‘Observamos que para un miembro que esta sujeto a fuerzas verticales en su pla
no de simetria, el esfuerzo maximo por corte transversal ocurre en el eje neutro don-
Meclesfuerzo de rension debido a la flexi6n ¢s cero. El esfuerzo por corte transversal
wale cero an las fibras extremas (parte superior ¢ inferior) donde el esfuerzo de ten-
lon es maximo. Los esfuerzos por flexin en las fibras extremas de miembros soli-
doc de seccin circular o rectangular sujetos a cargas laterales son los mas importan~
tee, Para miembros muy cortos pudiera ser mas importante para el disefio el esfuer-
vo de corte transversal. En el calculo de flechas tiene mucha importancia el esfuerzo
decom por torsion. En el Cap. 6 se considerartn los efectos combinados de esfuer
ao de corte y tension. Para secciones tipo I, el esfuerzo combinado puede ser critica
‘tnion de los patines con ef aima (véase la Sec. 6-3, Teoria del Corte Maximo).
esfuerzo de corte queda
Deflexion por corte
La deflexion por corte se origina debido a la deformacion originada por ¢! corte ¥
para casi todos los miembros de una maquina, la deflexson por corte e> pequeti
Aniilsis de esfuerzo y desplazarniento 281
comparada con los efectos flexionantes. La pendiente adicional debido al corte es la
deformacién en el eje neutro originada por el corte
io = (eu)
donde G es el médulo de corte. Asi, para una secci6n rectangular, yo = 1.SVAG);
y para una seccién circular,7, = + V/(AG) donde A es el rea de la seccibn trans
versal, Para una seccién I 7 = VGA gd) (aproximadamente), lo cual puede set 2
fo mas veves VAG).
El cambio de deflexion entre dos puntos sobre un miembro esta dado por la in~
tegral dela deformacion debida al corte entre dichos puntos. Por ejemplo, en el caso
de un miembro rectangular simplemente apoyado de tongitud L con una carga
central P, la deflexion en el centro debido al corte es
La deflexion total esté dada pr la suma de la deflexion por corte y a deflexién por
flexion. En el centro, la deflexién por flexion es PL’/(48E, la cual para el caso de
la mayoria de los miembros de seccion rectangular es mucho mayor que la deforma-
cién por corte, de tal manera que esta ultima puede despreciarse. Sin embargo, la
eflexion por corte en secciones cortas I, panales y secciones formadas por capas
puede ser de igual orden de magnitud que para deflexién por flexion.
Contro da corte
En los miembros de maquinas con cargas laterales consideradas previamente, se ha
supuesto que las cargas resultantes actian en un plano de simetria a través del eje
longitudinal del miembro. Por lo tanto, suponemos que la carga resuitante pasa a
través del centro de gravedad de la secci6n transversal simétrica. Bajo estas condi-
ciones, el miembro debera deflexionarse sin torsién en el plano de simetria. Sin em-
Dargo, esta disposicion no siempre es factible.
‘Como ejemplo, considérese la seccién canal en la Fig. 5-19a sujeta a cargas ver-
ticales. No se tiene simetria con respecto al plano vertical y se tendré la tendencia a
torcerse a menos que la resultante permanezca en cierto piano definido por el centro
de corte. Supéngase que el centro de corte se encuentre a la distancia desconocida e
Gel centro de la pared vertical del canal y supongase que las cargas resultantes se diri-
jan hacia el centro de corte, En el caso de una viga empotrada con carga P entre
textremo libre y a seccion cortada mostrada, hay una fuerza de corte vertical V = P
en la pared vertical del canal. Se supone que la pared vertical toma por completo la
fuerza de corte vertical, mientras que las paredes horizontales toman solamente las
fuerzas de corte horizontales, La distribucién real del esfuerzo de corte puede ser
‘muy complicada, pero se analizarin secciones delgadas de un modo simple, despre~
cidndose cualquier variacién en el esfuerzo a través del espesor 1. La Ec. 5-9 puede
aplicarse a este problema si integramos a lo largo de la linea de centros del alma y
282 Diseio de miquinas—teorl y prbctica
Fig. 5-19 Centro de core (a), (bly (e}
‘Seeci6n canal. 4) Secc:on angular.
Andlsis de estuerzo y desplazamiento 28
despues a lo largo de la linea de centros del patin hasta el extremo libre del mismo.
Podemos suponet continuidad de los esfuerzos de corte en las uniones del alma y los
patines,
Asi, la distribucién aproximada del esfuerzo de corte tiene la forma parabélica
o[[Psa +8 ['ar)
7,
ue hd
Ta 737
para la posicién de z = z, en el alma, Para la posicion de y' = y{ en el patin, la
distribucion del esfuerzo de corte tiene la siguiente forma lineal
vk
vk ;
a0) 9
Para este ejemplo, la direccibn del esfuerzo de corte esta indicada en ta Fig. 5-196,
Si la Ee, 5-13 Se integra sobre el patin completo, se obtiene la resultante de corte
en el patin inferior (o sobre un corte perpendicular al eje dela viga) F = Vhea"/(4).
Se tendré una fuerza igual y opuesta en el patin superior. El momento Fh debido ala
resultante del corte en los patines esta equilibrado por el momento Ve debido a la car-
4a vertical y al corte vertical, en el supuesto de que las cargas resultantes y las reac-
ciones sean aplicadas en el centro de corte, Al igualar los momentos se podra obte-
net la posicién del centro de corte.
(5-14)
El valor de e obtenido de la Ec. 5-14 localiza el plano de la carga si el canal esta libre
de torsién. Para un diseno real esta situacién no se efectia; por lo tanto, ¢s de espe-
tarse se cengan efectos de torsion, sobre todo para secciones no simétricas
Para el caso de secciones delgadas que se unen en un simple punto (por ejemplo,
ef punto a en la seccién angular, Fig. 5-194), el centro de corte es dicho punto. Para
cargas verticales sobre la seccion angular no se tendr& torsign si las cargas pasan a
través de la nea de centro de! ala vertical. Como previamente se indied, si una sec-
cidn tiene plano vertical de simetria, as cargas verticales que actiian en el plano, no
causan torsién.
SECCION 57
Torsion
‘Al momento que tiende a torcer una barra alrededor de su propio eje, se le llama
momento de torsidn o simplemente par. El mismo sistema de fuerza puede causar
flexion en un mlembro de una maquina y momento de torsion en otro.
1284. Diseio de méquinas— teria préctica
Esfuerzo de corte en una flecha circular debido al momento de torsién
‘Cuando una flecha s6lida circular esta sujeta a un par o momento de torsion 7, su-
pponemos una distribucion lineal del esfuerzo de corte dentro de la flecha, Sobre
Cualquier plano perpendicular al eje de la flecha, el esfuerzo de corte «se supone que
ts proporcional a la distancia r desde el centro de la flecha (Fig. 5-20). Un andlisis
‘mas riguroso del problema demuestra que esta suposicion es valida para fleckas cir-
cculares solidas y huecas, pero no lo ¢s para otros perfiles.
‘Podemos escribir de la siguiente manera la relaciOn esfuerzo-par
(515)
CObservamos que el esfuerzo de corte sobre cada elemento de la seccién transversal
contribuye al par de acuerdo a la integral
sda
y sustituyendo en la Ec, $-15 obtenemos
para una seccién sélida de diametro D. La constante J ¢s el momento polar de iner-
cia de la seccion transversal, Para la flecha con agujero central de diametro D,
—\
Fig. 5:20 Torsion de una flecha crculr
Andis de estuerzo y desplazemiento 285
El esfuerzo de corte maximo ocurre en el radio maximo de la flecha circular tanto
sblida como hueca. Entonces, de la Ec. 5-15, se obtiene
toa = TB
uy
Para una flecha sida circular, se obtiene
er x16
me SDE oe
Sin embargo, veremos mas adelante, que para secciones no circulares, la rigidez no
3 proporcional al mowiento polar de inercia y que el esfuerzo de corte no es propor
sional al radio.
Deflexi6n debida al momento de torsion
El médulo de la elasticidad a corte, o simplemente médulo de corte esta definido por
donde la deformacién de corte y ¢s adimensional. Considérese un elemento de flecha
de diametro D (Fig. 5-21). Supongase que una de las caras gira a través de un angulo
dg con respecto a la otra cara. Para deformaciones pequeftas, el arco de la circunte-
rencia (D/2) d@ es igualado a dx. Igualando las dos expresiones y usando las Ecs.
5-15 y 5-17, se obtiene la deflexién angular por unidad de longitud axial
9 = do /dx = T/(GJ. Para un par constante T la rotacidn celativa entre dos ca-
ras a una distancia L esta dada por
Th
otrad) = 5 (5-18)
Fig. 621 Deformacion por corte y deflexion,
285 Disefo de miquinasteora y préctica
‘Algunas veces es conveniente definir la constante torsional de resorte &; para
una fongitud finita de flecha como el par de torsion por rotacin unitaria, Entonces,
de la Ec, 5-18 tenemos
1
signs a
En el caso de flecha escalonada podemos usar subindices k, L y J para cada seccién.
Sil par es constante en toda la flecha la constante de resorte equivalente esta dada
por la reciproca de las sumas dela reciproca de las constantes para cada diametro.
Torsion on secciones no circulares
Debido a a simetria de una flecha circular, ¢s muy ldgico suponer que no hay alabeo
en las secciones transversales (planos perpendiculares al eje de la flecha). Sin embar-
go, un plano en la seccién transversal de una flecha no circular se alabeara hasta te
ner forma no plana cuando esta sujeta a torsi6n.
‘Considérese una secci6n no circular (es decir, una flecha u otro miembro de sec-
cidn transversal constante pero no circular) sujeta a un par constante en toda su lon~
situd (Fig, §-22a), Debido a que la secci6n no cambia se tendra una raz6n de torsion
Constante (en radianes por unidad de longitud), que la designaremos por #. Sea que
uu vy w representen los desplazamientos de un punto en las direcciones x, yy £, F€5-
pectivamente, Entonces, para una rotacion total pequefia. =, tendremos
(20)
wad
donde y = w (x,y) es hasta ahora, desconocido y representa el alabeo de los pla-
nos de la seccién transversal
'A fin de describir el problema general de secciones no circulares, regresemos
ahora a los esfuerzos y deformaciones por corte sobre una cara perpendicular al eje
de la flecha. Las relaciones de deformacion por corte-desplazamiento estan dadas
por
5.21)
Anbliss de estuerzo y desplazanviento 287
Fig. $22 (a) Torsién de une sec
cign no circular. 1B) Corte en un ele
mento diferencial en a superficie la.
tera. (e) Seccion transversal eliptca
El eafuerzo maximo de corte ceurre
onx= tay=0,
Sustituyendo las Ecs. 5-20 en la $-21 y usando las relaciones esfuerzo-deformacién
cobtenemos
(288 Diseio de méquinasteore y préctica
El par de torsion total es igual ala suma de las contribuciones de los esfuerzos de
fone sobre cada elemento de la seccion transversal multiplicada por el brazo de! mo-
soento, Midiendo las coordenadas x y yal centro de Ia gravedad de la seccion trans-
versal, tendremos el valor del par de torsion.
donde A es ei area dela seccion transversal total. Sustituyendo la Ec. 5-2 en la 5-23,
obtenemos T= GJ donde
‘Algunas veces es itil usar un método inverso 0 semiinverso en problemas de este
tipo. Es decir, suponemos ta forma de la solucion y después vemos qué problema
hemos restelto. La suposicion debe satisfacer las ecuaciones de equilibrio. Por ejem-
plo, podemos suponer que el desplazamiento w sea proporcional al producto de x
7, e8t0 €5,
(5-24)
vecy
donde ces una constante, Ahora examinamos las condiciones de frontera para saber
fa naturaleza de los limites para los cuales esta suposicion pudiera ser valida, Si no
hay esfuerzos normales en la direcciOn z, la fuerza neta sera de valor cero en un ele~
mento diferencial colocado en la superficie lateral. Equilibrando las fuerzas de corte
axiales sobre un elemento diferencial (Fig. $-22b) el resultado es
dx
taldy de) +t,
El signo negativo que precede al diferencial dx no implica area negativa, sino que to-
sma en cuenta el cambio negativo en la coordenada x tal como esta indicado en la fi-
ura, Obsérvese que tua e., ¥ al sustituir las Ecs. $-22, obtenemos la
condicién Frontera
(5-25)
para un limite eilindrico general, Si para éste ejemplo sustituimos vs = ¢xy, la Ec.
5-25 queda (c — lly dy + (¢ + Ix dy = 0. Integrando y rearregiando términos,
‘obtenemos
Andlisis de estuerzo y desplazamiento 289
es la ecuacién de una elipse. Es decir, que hemos resuelto el problema de la forsidn
de una flecha eliptica con semiejes a y b, donde
(Véase la Fig, $-22c.) Por lo tanto,
Evaluando la Ee. $-24 obtenemos
J=(i+o{ tdxdy+(l-a] yaxay
donde as integrales son los momentos de inercia f,e/,respectivamente, Sustituyen-
dol valor dey utlizando 1, = 22/4 y 1, » 2264/4, obtenemos
Bacio
ere
para la flecha eliptica, Usando este valor de J, obtenemos la rotacion toral
(at + LT
3aDG
o=
\Vemos en la Ee, $-27 que la constante J representa el momento polar de inercia
‘s6lo cuando c = 0; es decir, cuando la seccién es circular.
El esfuerzo de corte esta dado por
-2Ty 2x
al y xa
icie de radio minimo.
El valor maximo del esfuerzo de corte ocurre sobre la superf
Esto es
oe
76
Fas = £(20) (5-30)
donde 6 >a para la flecha eliptica orientada como en la Fig. 5-22c.
El andlisis anterior esta de acuerdo con el trabajo de St. Venant. También es im:
portante el trabajo de Prandtl en el estudio de la torsién. El trabajo de ambos inves-
tigadures esta deserito por Timoshenko y Goodier {1}
280. Diserio de méquines—teori y préctics
Ejemplo 5-1. Comparar la resistencia y riidez torsional de una seecin solida circular con
tana secciOn sida eliptica en a que el eje semimayor es de valor dable al eje semimenor.
CConsidere que ambos miembros en torsion son del mismo material tienen igual longitud
igual Area de seccién transversal
Solucién: La risider torsional de los dos miembros puede compararse examinando las
constantes torsionales de resorte de cada miembro (el par de torsion dividido entre Ia
You might also like
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Maquinarias y equipos para la industria de alimentosFrom EverandMaquinarias y equipos para la industria de alimentosNo ratings yet
- Guía para la resolución de problemas de electromagnetismo. Problemas resueltosFrom EverandGuía para la resolución de problemas de electromagnetismo. Problemas resueltosNo ratings yet
- Modelado Euleriano de flujo bifásico para el cálculo CFD de chorros diéselFrom EverandModelado Euleriano de flujo bifásico para el cálculo CFD de chorros diéselNo ratings yet
- Elementos de concreto reforzado IIFrom EverandElementos de concreto reforzado IIRating: 5 out of 5 stars5/5 (1)
- Microcentrales Hidroeléctricas con aplicación de máquinas reversiblesFrom EverandMicrocentrales Hidroeléctricas con aplicación de máquinas reversiblesRating: 5 out of 5 stars5/5 (1)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- Mecánica de la fractura y análisis de falla en metalesFrom EverandMecánica de la fractura y análisis de falla en metalesRating: 4.5 out of 5 stars4.5/5 (3)
- Diseño, construcción y criterios de supervisión de edificaciones en mampostería estructural según la NSR-10From EverandDiseño, construcción y criterios de supervisión de edificaciones en mampostería estructural según la NSR-10No ratings yet
- Resistencia de materiales: algunos temas especiales (Segunda edición)From EverandResistencia de materiales: algunos temas especiales (Segunda edición)Rating: 3 out of 5 stars3/5 (4)
- Soldadura MIG de acero inoxidable y aluminio. FMEC0210From EverandSoldadura MIG de acero inoxidable y aluminio. FMEC0210No ratings yet
- Prontuario de metales: Tablas para la industria metalúrgicaFrom EverandProntuario de metales: Tablas para la industria metalúrgicaRating: 1 out of 5 stars1/5 (1)
- Análisis de circuitos eléctricos Estado estableFrom EverandAnálisis de circuitos eléctricos Estado estableRating: 5 out of 5 stars5/5 (8)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónFrom EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónRating: 5 out of 5 stars5/5 (1)
- Cálculo termofluidodinámico de filtros de partículas de flujo de paredFrom EverandCálculo termofluidodinámico de filtros de partículas de flujo de paredRating: 5 out of 5 stars5/5 (1)
- Guía práctica de dimensionado de tuberías: Agua, gas, calefacción y energía solarFrom EverandGuía práctica de dimensionado de tuberías: Agua, gas, calefacción y energía solarRating: 3.5 out of 5 stars3.5/5 (4)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Simulaciones computacionales de materiales y nanoestructurasFrom EverandSimulaciones computacionales de materiales y nanoestructurasNo ratings yet
- Mecánica aplicada al diseño de los elementos de máquinas: Temas básicos de resistencia de materiales aplicables al diseño de arboles y ejesFrom EverandMecánica aplicada al diseño de los elementos de máquinas: Temas básicos de resistencia de materiales aplicables al diseño de arboles y ejesRating: 5 out of 5 stars5/5 (1)
- Análisis y diseño de circuitos eléctricos: Teoría y prácticaFrom EverandAnálisis y diseño de circuitos eléctricos: Teoría y prácticaNo ratings yet
- Modelado tridimensional del flujo de aire en el cilindro de motores diésel de inyección directaFrom EverandModelado tridimensional del flujo de aire en el cilindro de motores diésel de inyección directaNo ratings yet
- Modelado fenomenológico del proceso de combustión por difusión diéselFrom EverandModelado fenomenológico del proceso de combustión por difusión diéselNo ratings yet
- Caracterización de las constantes mecánicas de la Guadua angustifolia KunthFrom EverandCaracterización de las constantes mecánicas de la Guadua angustifolia KunthNo ratings yet
- Soldadura MAG de chapas de acero al carbono. FMEC0210From EverandSoldadura MAG de chapas de acero al carbono. FMEC0210No ratings yet
- Guía de instalación en locales de características especialesFrom EverandGuía de instalación en locales de características especialesNo ratings yet
- Estudio de los efectos de la cavitación en toberas de inyección diésel sobre los procesos de inyección y de formación de hollínFrom EverandEstudio de los efectos de la cavitación en toberas de inyección diésel sobre los procesos de inyección y de formación de hollínRating: 5 out of 5 stars5/5 (2)
- Análisis de fallas de estructuras y elementos mecánicosFrom EverandAnálisis de fallas de estructuras y elementos mecánicosRating: 4 out of 5 stars4/5 (5)
- Diseño de sistemas termofluidos: Una visión integradoraFrom EverandDiseño de sistemas termofluidos: Una visión integradoraNo ratings yet
- Modelado unidimensional de los motores de dos tiempos de pequeña cilindradaFrom EverandModelado unidimensional de los motores de dos tiempos de pequeña cilindradaRating: 5 out of 5 stars5/5 (1)
- Conceptos avanzados del diseño estructural con madera: Parte II: CLT, modelación numérica, diseño anti-incendios y ayudas al cálculoFrom EverandConceptos avanzados del diseño estructural con madera: Parte II: CLT, modelación numérica, diseño anti-incendios y ayudas al cálculoRating: 5 out of 5 stars5/5 (1)
- Recirculación de gases de escape mediante sistemas de baja presión en motores diésel sobrealimentadosFrom EverandRecirculación de gases de escape mediante sistemas de baja presión en motores diésel sobrealimentadosRating: 3 out of 5 stars3/5 (3)
- Montaje, ajuste y verificación de elementos de máquinasFrom EverandMontaje, ajuste y verificación de elementos de máquinasRating: 3 out of 5 stars3/5 (1)
- Conceptos básicos de electricidad y magnetismoFrom EverandConceptos básicos de electricidad y magnetismoRating: 5 out of 5 stars5/5 (2)
- Interpretación de planos en soldadura. FMEC0210From EverandInterpretación de planos en soldadura. FMEC0210Rating: 4.5 out of 5 stars4.5/5 (3)
- Transmisión de calor en motores alternativos: aplicación al aprovechamiento energético de los gasesFrom EverandTransmisión de calor en motores alternativos: aplicación al aprovechamiento energético de los gasesNo ratings yet
- Influencia de la cavitación sobre el desarrollo del chorro diéselFrom EverandInfluencia de la cavitación sobre el desarrollo del chorro diéselNo ratings yet
- Predicción y optimización de emisiores y consumo mediante redes neuronales en motores diéselFrom EverandPredicción y optimización de emisiores y consumo mediante redes neuronales en motores diéselNo ratings yet
- Soldadura MAG de estructuras de acero al carbono. FMEC0210From EverandSoldadura MAG de estructuras de acero al carbono. FMEC0210No ratings yet