You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- On Learning To Identify Genders From Raw Speech Signal Using CnnsDocument5 pagesOn Learning To Identify Genders From Raw Speech Signal Using CnnsharisbinziaNo ratings yet
- (Course Outline) Adv. Theory of ComputationDocument1 page(Course Outline) Adv. Theory of ComputationharisbinziaNo ratings yet
- University Searching Template 2 1Document8 pagesUniversity Searching Template 2 1harisbinziaNo ratings yet
- Gayle McDowell CareerCup Sample ResumeDocument2 pagesGayle McDowell CareerCup Sample ResumeMrunal RuikarNo ratings yet
- Adf ConfDocument1 pageAdf ConfharisbinziaNo ratings yet
- Ms Cs Itu SampleDocument9 pagesMs Cs Itu SampleharisbinziaNo ratings yet
- Computer ScienceDocument7 pagesComputer SciencefakihaatifNo ratings yet
- Ms Cs Itu SampleDocument9 pagesMs Cs Itu SampleharisbinziaNo ratings yet
- Reshaping Technical CommunicationDocument235 pagesReshaping Technical CommunicationharisbinziaNo ratings yet
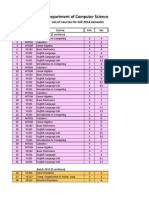
- Department of Computer Science: List of Courses For Fall 2014 SemesterDocument10 pagesDepartment of Computer Science: List of Courses For Fall 2014 SemesterharisbinziaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Shadow On The Mountain Reading GuideDocument2 pagesShadow On The Mountain Reading GuideAbrams BooksNo ratings yet
- Importance of Research in ArchitectureDocument9 pagesImportance of Research in ArchitectureKathleen Mae SoriaNo ratings yet
- CV - Diego Allendes - Civil EngineerDocument1 pageCV - Diego Allendes - Civil EngineerPari D. ShitPostingNo ratings yet
- Capstone PosterDocument1 pageCapstone Posterapi-538849894No ratings yet
- Rdbms (Unit 2)Document9 pagesRdbms (Unit 2)hari karanNo ratings yet
- Levis Vs VogueDocument12 pagesLevis Vs VoguedayneblazeNo ratings yet
- Parallel Worlds ChessDocument2 pagesParallel Worlds ChessRobert BonisoloNo ratings yet
- Activity 3: Case Study Johnson & Johnson'S Stakeholder ApproachDocument3 pagesActivity 3: Case Study Johnson & Johnson'S Stakeholder ApproachNika CruzNo ratings yet
- 01 - What Is The S3 ScannerDocument4 pages01 - What Is The S3 ScannerViet PhanNo ratings yet
- Apa, Muzica Si Ganduri: Masaru Emoto Was Born in Yokohama in July 1943. He Is A Graduate of The Yokohama MunicipalDocument4 pagesApa, Muzica Si Ganduri: Masaru Emoto Was Born in Yokohama in July 1943. He Is A Graduate of The Yokohama MunicipalHarlea StefanNo ratings yet
- Occlusal Considerations in Implant Therapy Clinical Guidelines With Biomechanical Rationale PDFDocument10 pagesOcclusal Considerations in Implant Therapy Clinical Guidelines With Biomechanical Rationale PDFSoares MirandaNo ratings yet
- Children Nutrition Action PlanDocument64 pagesChildren Nutrition Action PlanpapayNo ratings yet
- A Dose of Emptiness PDFDocument304 pagesA Dose of Emptiness PDFEliza KarpNo ratings yet
- 19C.Revolution and Counter Rev. in Ancient India PARTIII PDFDocument94 pages19C.Revolution and Counter Rev. in Ancient India PARTIII PDFVeeramani ManiNo ratings yet
- Metro Concast Steel Corporation vs. Allied Bank CorporationDocument13 pagesMetro Concast Steel Corporation vs. Allied Bank CorporationGab CarasigNo ratings yet
- Chanakya National Law University, Patna: Project of Public International LawDocument22 pagesChanakya National Law University, Patna: Project of Public International LawAditya Singh100% (1)
- Anna Kornbluh - Marxist Film Theory and Fight Club (2019, Bloomsbury Academic)Document195 pagesAnna Kornbluh - Marxist Film Theory and Fight Club (2019, Bloomsbury Academic)Yunus ErdoğanNo ratings yet
- Communicating EffectivelyDocument7 pagesCommunicating EffectivelyPaulo LewisNo ratings yet
- UST Medicine I Schedule 2016-2017Document6 pagesUST Medicine I Schedule 2016-2017ina17_eaglerNo ratings yet
- Manticore Search Case-Study Layout-InternationalDocument1 pageManticore Search Case-Study Layout-Internationalnilasoft2009No ratings yet
- IAII FINAL EXAM Maual SET BDocument9 pagesIAII FINAL EXAM Maual SET BClara MacallingNo ratings yet
- Fuellas Vs CadanoDocument4 pagesFuellas Vs CadanoMutyaAlmodienteCocjinNo ratings yet
- Question Bank (ASP)Document3 pagesQuestion Bank (ASP)Gurleen BabraNo ratings yet
- Divya Shree: ObjectiveDocument2 pagesDivya Shree: Objectivekids montessoriNo ratings yet
- An Introduction To The Study of Medieval Latin VersificationDocument246 pagesAn Introduction To The Study of Medieval Latin VersificationGregorio Gonzalez Moreda100% (1)
- Insurance Dispute Over Mortgaged PropertyDocument2 pagesInsurance Dispute Over Mortgaged PropertyBetson CajayonNo ratings yet
- A Brazilian Furniture Industry Case StudyDocument17 pagesA Brazilian Furniture Industry Case StudyEnrique MabanoNo ratings yet
- Ayala Land Title Superior in Land DisputeDocument2 pagesAyala Land Title Superior in Land DisputeAdolph Adolfo100% (1)
- Topic 1 Being A 21st Century LearnerDocument17 pagesTopic 1 Being A 21st Century LearnerNAZATUL EZETY BINTI AHMAD STUDENTNo ratings yet
- Aadhaar update form for Anjali SinghDocument4 pagesAadhaar update form for Anjali Singhrahul chaudharyNo ratings yet