You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Schaffler 6308Document1 pageSchaffler 6308JINKYANo ratings yet
- Theory of TorsionDocument11 pagesTheory of TorsionJINKYANo ratings yet
- STEPS - Super Market AnalysisDocument1 pageSTEPS - Super Market AnalysisJINKYANo ratings yet
- Passenger CarDocument6 pagesPassenger CarJINKYANo ratings yet
- Timken 6308Document3 pagesTimken 6308JINKYANo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Biosensors and Its TypesDocument36 pagesBiosensors and Its TypesAyush GoelNo ratings yet
- Temperature/ Humidity Duct Sensor: ApplicationDocument4 pagesTemperature/ Humidity Duct Sensor: ApplicationQuyết Nguyễn MạnhNo ratings yet
- Autonics Pressure SwitchDocument15 pagesAutonics Pressure SwitchMin ZayarNo ratings yet
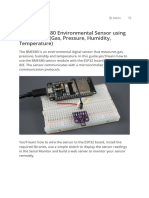
- ESP32: BME680 Environmental Sensor Using Arduino IDE (Gas, Pressure, Humidity, Temperature)Document31 pagesESP32: BME680 Environmental Sensor Using Arduino IDE (Gas, Pressure, Humidity, Temperature)Ayman AldarabieNo ratings yet
- 998-20256927 2019 Line Card GMDocument2 pages998-20256927 2019 Line Card GMIMRANNo ratings yet
- Using Accelerometers in A Data Acquisition SystemDocument10 pagesUsing Accelerometers in A Data Acquisition SystemueidaqNo ratings yet
- Live DataDocument32 pagesLive DataΑΝΑΣΤΑΣΙΟΣ ΜΥΛΩΝΑΣNo ratings yet
- Temp TXRDocument64 pagesTemp TXRmanipsNo ratings yet
- Touch Sensor ModuleDocument23 pagesTouch Sensor ModulecmdiNo ratings yet
- 003 041e 3.0Document2 pages003 041e 3.0Ahmed El-ShafeiNo ratings yet
- 0901d19680526025 Sensor Bearings - SKF Motor Encoder Unit - 15276 - 2 EN - TCM - 12 172382Document2 pages0901d19680526025 Sensor Bearings - SKF Motor Encoder Unit - 15276 - 2 EN - TCM - 12 172382Lucas PaulaNo ratings yet
- Optira Encoders Data Sheet EnglishDocument14 pagesOptira Encoders Data Sheet EnglishTariq MukhtarNo ratings yet
- TESCA-52051 ManualDocument4 pagesTESCA-52051 ManualGaurav KumarNo ratings yet
- Reverse Car Parking System: IOT Project OnDocument12 pagesReverse Car Parking System: IOT Project OnShraddha Tamhane100% (1)
- Fully Supervised Wireless Alarm Control System: User GuideDocument38 pagesFully Supervised Wireless Alarm Control System: User GuideAdrian TurcuNo ratings yet
- Sheet 1 SolDocument12 pagesSheet 1 SolEsmail MahmoudNo ratings yet
- Principles of Remote SensingDocument410 pagesPrinciples of Remote SensingAbhishek Sharma0% (1)
- Interfacing LCD To Arduino-Tutorial To Display On LCD ScreenDocument16 pagesInterfacing LCD To Arduino-Tutorial To Display On LCD ScreenSanjeev100% (2)
- Hospitals CSSDDocument72 pagesHospitals CSSDIwan HamzahNo ratings yet
- United States Patent: (10) Patent No.: (45) Date of PatentDocument11 pagesUnited States Patent: (10) Patent No.: (45) Date of Patentabdullah yousefiNo ratings yet
- Señales de Entrada ECUDocument34 pagesSeñales de Entrada ECUlibertyplusNo ratings yet
- Iveco Bosch Application PDFDocument11 pagesIveco Bosch Application PDFjose arteagaNo ratings yet
- Operating Manual: Magnaflux Uv-A Light MeterDocument2 pagesOperating Manual: Magnaflux Uv-A Light MeterEdgar Alex Figueroa Uribe100% (1)
- TLDocument302 pagesTLTony SuárezNo ratings yet
- Fco-461 Operation English)Document26 pagesFco-461 Operation English)Tiến Bộ BùiNo ratings yet
- NOSHOKDocument6 pagesNOSHOKAlejandro Ibarra ArelyNo ratings yet
- PC3400 - Data Sheet - 051514Document2 pagesPC3400 - Data Sheet - 051514Joel CunhaNo ratings yet
- FD 8030 User ManualDocument2 pagesFD 8030 User ManualPopa DanNo ratings yet
- CPD Elv BMSDocument93 pagesCPD Elv BMSscribd99190No ratings yet
- Home Automation Using LabVIEWDocument3 pagesHome Automation Using LabVIEWservice électricité bâtimentNo ratings yet