You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- B Vs C TestDocument7 pagesB Vs C TestSiva Subramaniam M BNo ratings yet
- Calculator Techniques For Solving Progression ProblemsDocument6 pagesCalculator Techniques For Solving Progression ProblemsThomas John Doblas AgrabioNo ratings yet
- An SAP BW DSO Stands For Data Store Object and Was Previously Called An ODS Which Stands For Operational Data StoreDocument3 pagesAn SAP BW DSO Stands For Data Store Object and Was Previously Called An ODS Which Stands For Operational Data StorekopikoNo ratings yet
- Adding Fields Other Than Special Fields in Fbl3nDocument15 pagesAdding Fields Other Than Special Fields in Fbl3nnjsmshah100% (5)
- How To Connect To SAP R3 and Call BAPI From MS Excel VBADocument11 pagesHow To Connect To SAP R3 and Call BAPI From MS Excel VBAandrew1980No ratings yet
- Data Visualization Flyer - Protiviti - 230817Document1 pageData Visualization Flyer - Protiviti - 230817Ashwin LeonardNo ratings yet
- Add Maths Mid Term Form 4 2017Document6 pagesAdd Maths Mid Term Form 4 2017Jason CookNo ratings yet
- D2 - CoCubes - PseudocodeDocument200 pagesD2 - CoCubes - Pseudocodehimanshu jain75% (4)
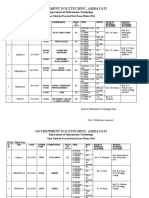
- Government Polytechnic, Amravati: Department of Information TechnologyDocument23 pagesGovernment Polytechnic, Amravati: Department of Information Technologyswapnil kaleNo ratings yet
- Linux QMI SDK Application Developers Guide 1.23Document55 pagesLinux QMI SDK Application Developers Guide 1.23agrothendieckNo ratings yet
- Contracts - Specifications of NRL Building JobsDocument311 pagesContracts - Specifications of NRL Building JobsBLUE TOOTHNo ratings yet
- Virtual Hil SoftwareDocument12 pagesVirtual Hil SoftwareDibyaraj Krishna BeheraNo ratings yet
- PCTV Nanostick DVB-T: Big TV Experience in Small PackageDocument1 pagePCTV Nanostick DVB-T: Big TV Experience in Small PackageShaik Mohammed HaikhalNo ratings yet
- k3p 07AS SheetDocument2 pagesk3p 07AS SheetsoniNo ratings yet
- Digital Signal Processing: Chapter 9 - Implementation of Discrete-Time SystemsDocument68 pagesDigital Signal Processing: Chapter 9 - Implementation of Discrete-Time SystemsAagam ShahNo ratings yet
- C Cube20S 10-15 ENDocument2 pagesC Cube20S 10-15 ENGelu BoneaNo ratings yet
- C# Trim String TipsDocument8 pagesC# Trim String TipsMahesh BhupatiNo ratings yet
- Ibm InfosphereDocument8 pagesIbm InfosphereAkhila ShajiNo ratings yet
- Neper Reference Manual: Romain QueyDocument78 pagesNeper Reference Manual: Romain QueyAmy Simmons McClellanNo ratings yet
- Sfswmso13 Part 03Document156 pagesSfswmso13 Part 03Gustavo Tromper Trimpis100% (1)
- Rbafy-Database SQL Programming 7.1Document508 pagesRbafy-Database SQL Programming 7.1dhanoj6522No ratings yet
- SM7 Incident Management-Tables, Metadata, ObjectsDocument32 pagesSM7 Incident Management-Tables, Metadata, Objectsneha100% (2)
- Lesson 1 (Fundamentals of DBMS) PDFDocument30 pagesLesson 1 (Fundamentals of DBMS) PDFLingerfaith Mayor MoralesNo ratings yet
- Indian National Olympiad in Informatics, 2015Document6 pagesIndian National Olympiad in Informatics, 2015Fian IlhamNo ratings yet
- Definition of Conceptual FrameworkDocument3 pagesDefinition of Conceptual FrameworkryanNo ratings yet
- C++ Dynamic Memory: New and Delete OperatorsDocument5 pagesC++ Dynamic Memory: New and Delete OperatorsMohamed K MarahNo ratings yet
- Data Structures and AlgorithmsDocument5 pagesData Structures and AlgorithmsAnubhavAgarwal100% (1)
- Saxena MonaDocument114 pagesSaxena Mona66ANAND66No ratings yet
- Jntu MDocument3 pagesJntu MVijay SagarNo ratings yet
- TwitterOauth - Oob AuthenticationDocument5 pagesTwitterOauth - Oob AuthenticationRenan Pereira Dos SantosNo ratings yet