You might also like
- Performance of Multiples Adaptive Algorithms For Uplink Time Difference of Arrival Positioning TechniqueDocument13 pagesPerformance of Multiples Adaptive Algorithms For Uplink Time Difference of Arrival Positioning TechniqueIlham El MourabitNo ratings yet
- Modeling and Simulation of An LTE System Simulator Dedicated To Mobile Location Estimation Using OTDOADocument4 pagesModeling and Simulation of An LTE System Simulator Dedicated To Mobile Location Estimation Using OTDOAIlham El MourabitNo ratings yet
- Performance of Enhanced LTE OTDOA Positioning Approach Through Nakagami-M Fading ChannelDocument12 pagesPerformance of Enhanced LTE OTDOA Positioning Approach Through Nakagami-M Fading ChannelIlham El MourabitNo ratings yet
- Performance of Enhanced LTE OTDOA Positioning Approach Through Nakagami-M Fading ChannelDocument12 pagesPerformance of Enhanced LTE OTDOA Positioning Approach Through Nakagami-M Fading ChannelIlham El MourabitNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- T 121102Document8 pagesT 121102Ayman ElnasharNo ratings yet
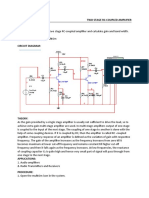
- TWO STAGE RC Coupled AmplifierDocument3 pagesTWO STAGE RC Coupled Amplifierfarzana kousar100% (1)
- 2Document4 pages2SaiSaiNo ratings yet
- Security Activation in LTEDocument3 pagesSecurity Activation in LTEafroxxxNo ratings yet
- Datasheet Control Remoto F21-6SDocument6 pagesDatasheet Control Remoto F21-6SRicardo PeraltaNo ratings yet
- CS-2 Lab Question BankDocument4 pagesCS-2 Lab Question BankBharathNo ratings yet
- RSRP, Rssi and RSRQ: RSRP Measurement Report Mapping (3GPP Reference: TS 36.133)Document3 pagesRSRP, Rssi and RSRQ: RSRP Measurement Report Mapping (3GPP Reference: TS 36.133)Vishal KushwahaNo ratings yet
- Digital Communication Systems by Simon Haykin-97Document6 pagesDigital Communication Systems by Simon Haykin-97matildaNo ratings yet
- EC8094-SATELLITE COMMUNICATION-1814478256-Satellite Communication QBDocument25 pagesEC8094-SATELLITE COMMUNICATION-1814478256-Satellite Communication QBvijayNo ratings yet
- High Resolution Spectral Analysis Using Channelizers: Ricardo LosadaDocument41 pagesHigh Resolution Spectral Analysis Using Channelizers: Ricardo Losadarajsha333No ratings yet
- Pointing Errors FSO TurbulenceDocument9 pagesPointing Errors FSO TurbulencePooja GopalNo ratings yet
- BHT-1 Hub System Overview - Rev07Document31 pagesBHT-1 Hub System Overview - Rev07Manoel CantoNo ratings yet
- Principles of Radio Transmitters and Receivers 2Document92 pagesPrinciples of Radio Transmitters and Receivers 2Trần Châu ThôngNo ratings yet
- Applications For Public-Key CryptosystemsDocument25 pagesApplications For Public-Key CryptosystemsRanjanNo ratings yet
- EEE-354: Telecommunication Systems EngineeringDocument35 pagesEEE-354: Telecommunication Systems EngineeringBilal HabibNo ratings yet
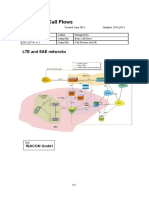
- Lte CSFB CallflowsDocument27 pagesLte CSFB CallflowsDario AlfaroNo ratings yet
- 2L+4H 20m APXVBLL20EX-CDocument2 pages2L+4H 20m APXVBLL20EX-Ccmsd01No ratings yet
- AsfdasdDocument14 pagesAsfdasdmgoldiieeeeNo ratings yet
- Mes9 - XXXPX: Electrical SpecificationsDocument3 pagesMes9 - XXXPX: Electrical SpecificationsRezaadityamuhaNo ratings yet
- PAM and Flat Top PAMDocument13 pagesPAM and Flat Top PAMGoitom HaileNo ratings yet
- RV College of Engineering: Vibration Analysis of Rotating MachineryDocument24 pagesRV College of Engineering: Vibration Analysis of Rotating MachineryMallarddyNo ratings yet
- Optix RTN 950 Product Inroduction: RTN - Radio Transmission NodeDocument41 pagesOptix RTN 950 Product Inroduction: RTN - Radio Transmission NodeChristopher AiyapiNo ratings yet
- Lowpass Fir Filter Using Hamming WindowDocument6 pagesLowpass Fir Filter Using Hamming WindowDeepthi PrabhakaranNo ratings yet
- MSSR 40007 Taiwan International ParkDocument33 pagesMSSR 40007 Taiwan International ParkPembangunan SBSNo ratings yet
- Banerjee Satellite Communication Sample ChaptersDocument29 pagesBanerjee Satellite Communication Sample ChaptersRakshit KandpalNo ratings yet
- VMC Manual Huawei E220Document9 pagesVMC Manual Huawei E220Sergio Uscamaita Flores0% (1)
- Antenna SpecificationsDocument2 pagesAntenna SpecificationsRobertNo ratings yet
- Combining Steganography and Cryptography: New DirectionsDocument10 pagesCombining Steganography and Cryptography: New DirectionsInternational Journal of New Computer Architectures and their Applications (IJNCAA)No ratings yet
- Understanding OTN Optical Transport Network (G.709)Document35 pagesUnderstanding OTN Optical Transport Network (G.709)Duc TranNo ratings yet
- XPD Aligment SoPDocument8 pagesXPD Aligment SoPslavun100% (2)