You might also like
- Arduino Projects with Tinkercad | Part 2: Design & program advanced Arduino-based electronics projects with TinkercadFrom EverandArduino Projects with Tinkercad | Part 2: Design & program advanced Arduino-based electronics projects with TinkercadNo ratings yet
- Line Follower Robot Using ArduinoDocument5 pagesLine Follower Robot Using ArduinoJesus Eduardo Campos ArcosNo ratings yet
- Smartphone Controlled Arduino Rover PDFDocument30 pagesSmartphone Controlled Arduino Rover PDFWalt Whimpenny100% (1)
- A Report of Mini Project Line Following Robot Car Using ArdinoDocument10 pagesA Report of Mini Project Line Following Robot Car Using Ardinorao asad0% (1)
- Project Report: Btech-Mechanical EngineeringDocument17 pagesProject Report: Btech-Mechanical EngineeringNaveen SNo ratings yet
- How To Wire An Arduino Based 3 Axis CNC MachineDocument11 pagesHow To Wire An Arduino Based 3 Axis CNC MachineSetyo WidodoNo ratings yet
- Build an Autonomous Navigation Robot with ArduinoDocument14 pagesBuild an Autonomous Navigation Robot with ArduinoShubass RameshNo ratings yet
- Robotics P042-ProcedureDocument6 pagesRobotics P042-ProcedureDebajit Deka 7019No ratings yet
- Obstacle Avoiding 4WD Arduino Robot Project ReportDocument12 pagesObstacle Avoiding 4WD Arduino Robot Project ReportLahmeen HaiderNo ratings yet
- B0610011017 PDFDocument8 pagesB0610011017 PDFEdiNo ratings yet
- Three Sensor Line Following Robot Detects 90 and 40 Degree TurnsDocument17 pagesThree Sensor Line Following Robot Detects 90 and 40 Degree Turnskhalid elmarzakNo ratings yet
- Build Line Following Robot Using Arduino and Infrared LEDDocument5 pagesBuild Line Following Robot Using Arduino and Infrared LEDmetalpowerNo ratings yet
- Obstacle Detecting Line Follower RobotDocument19 pagesObstacle Detecting Line Follower RobotBibek Sau80% (5)
- Smart Robot CarDocument15 pagesSmart Robot Carlouizini abderahmaneNo ratings yet
- Parallel Parking RC CarDocument15 pagesParallel Parking RC CarazmyzumaNo ratings yet
- Line Follower Robot for Industrial ManufacturingDocument9 pagesLine Follower Robot for Industrial ManufacturingAhuja ShivamNo ratings yet
- Control Systems Project ReportDocument18 pagesControl Systems Project Reportayesha amjad100% (2)
- Arduino Car With L293D and Remote ControlDocument4 pagesArduino Car With L293D and Remote ControlDelamouNo ratings yet
- Balancing Robot: SelfDocument17 pagesBalancing Robot: SelfsheshankNo ratings yet
- Line Follower Robot Using ArduinoDocument13 pagesLine Follower Robot Using Arduinolizhi2012No ratings yet
- Obstacle Avoidance RobotDocument9 pagesObstacle Avoidance Robotnagasaikiran ponnapalliNo ratings yet
- Instrucciones MontajeDocument75 pagesInstrucciones MontajeJosé ToméNo ratings yet
- Advanced Line FollowerDocument15 pagesAdvanced Line FollowerMohtasim NakibNo ratings yet
- SGL Focuser Getting StartedDocument13 pagesSGL Focuser Getting Startedhell_raiserNo ratings yet
- Proyecto de Inglés Creando Tu Primer Arduino RobotDocument17 pagesProyecto de Inglés Creando Tu Primer Arduino RobotWalford Ademir Tipacti BendezuNo ratings yet
- Arduino Hexapod Avoider RobotDocument16 pagesArduino Hexapod Avoider RobotALINE TEREZA DE PAULANo ratings yet
- DLD PROJECT-Ayusha Vinayak Jagtap 211071071Document6 pagesDLD PROJECT-Ayusha Vinayak Jagtap 211071071Ayusha JagtapNo ratings yet
- Arduino PresentationDocument43 pagesArduino PresentationraamNo ratings yet
- Line Follower RobotDocument16 pagesLine Follower RobotRohit sharmaNo ratings yet
- Line Follower RobotDocument16 pagesLine Follower RobotSebastian NistoricăNo ratings yet
- Simple Humanoid Walking and Dancing Robot ArduinoDocument12 pagesSimple Humanoid Walking and Dancing Robot ArduinoHamza KhilaNo ratings yet
- Obstacle Avoiding RobotDocument17 pagesObstacle Avoiding RobotSmiley Boy Aanand100% (1)
- REPORTDocument22 pagesREPORThohi4808No ratings yet
- Arduino Modules L298NDocument4 pagesArduino Modules L298NNermin FejzicNo ratings yet
- TA0135 4WD Robot Kit Instruction ManualDocument98 pagesTA0135 4WD Robot Kit Instruction ManualghenriquezNo ratings yet
- Step 1: Specification, Motor DriverDocument8 pagesStep 1: Specification, Motor DriverAfriNo ratings yet
- Use Android Phone Sensors with ArduinoDocument19 pagesUse Android Phone Sensors with Arduinomarius_danila8736No ratings yet
- Arduino Self-Driving Car Guide: Build Your Own Using an Ultrasonic SensorDocument10 pagesArduino Self-Driving Car Guide: Build Your Own Using an Ultrasonic SensorMOHD ZASNI BIN MOHAMAD AHAD MoeNo ratings yet
- IOT Based Car Parking System Using Arduino and Nodemcu Esp8266Document17 pagesIOT Based Car Parking System Using Arduino and Nodemcu Esp8266Rajab AliNo ratings yet
- The Eye WriterDocument14 pagesThe Eye WriterRoberto AbadiaNo ratings yet
- Project Presentation PDFDocument22 pagesProject Presentation PDFARIF KANONNo ratings yet
- Build Your First RobotDocument8 pagesBuild Your First RobotVN ChampionNo ratings yet
- How To Build An Omni Wheels RobotDocument10 pagesHow To Build An Omni Wheels RobotJonty ChanduNo ratings yet
- Remote Controlled Robot Using ArduinoDocument5 pagesRemote Controlled Robot Using ArduinodanielNo ratings yet
- Building An Arduino ROVDocument14 pagesBuilding An Arduino ROVDavid ClodeNo ratings yet
- Arduino With Dual Motor Tank Coded in TinkerCad CoDocument11 pagesArduino With Dual Motor Tank Coded in TinkerCad CoLawrence DataNo ratings yet
- Arduino Air Bonsai Levitation: DIY Magnetic LevitationDocument32 pagesArduino Air Bonsai Levitation: DIY Magnetic LevitationMuhammad AmienNo ratings yet
- Arduino Sumo Robot: Before We Start .Document8 pagesArduino Sumo Robot: Before We Start .Gede WiawanNo ratings yet
- Tinkering ppt1Document10 pagesTinkering ppt1Swaroop SinghNo ratings yet
- Robot Cat: InstructablesDocument18 pagesRobot Cat: InstructablesantonioNo ratings yet
- Wiper Motor and Arduino Mega ServoDocument6 pagesWiper Motor and Arduino Mega ServobolksoftNo ratings yet
- Arduino Project Report IR CarDocument9 pagesArduino Project Report IR Carmohammad shoaibNo ratings yet
- Arduino Controlled Robotic Biped: Build a Walking RobotDocument18 pagesArduino Controlled Robotic Biped: Build a Walking RobotC SYAHBANANo ratings yet
- Arduino Bipolar Stepper Motor Control - Imple ProjectsDocument9 pagesArduino Bipolar Stepper Motor Control - Imple ProjectsSssNo ratings yet
- Obstacle Avoiding RobotDocument17 pagesObstacle Avoiding Robotukavnganesh2002No ratings yet
- Obstacle Avoiding RobotDocument18 pagesObstacle Avoiding RobotAJIN KNo ratings yet
- How To Build Another Useless Machine: Easy To Make, and Hard To Use!Document13 pagesHow To Build Another Useless Machine: Easy To Make, and Hard To Use!Dante KindeverNo ratings yet
- Build a Line-Following Robot with ArduinoDocument5 pagesBuild a Line-Following Robot with Arduinochockalingam athilingam100% (1)
- Line Maze Solving RobotDocument18 pagesLine Maze Solving RobotAsitha Kulasekera0% (1)
- G-21 - Lane Line DetectionDocument14 pagesG-21 - Lane Line DetectionPråshãnt ShärmãNo ratings yet
- Welcome To... : The Web Developer BootcampDocument30 pagesWelcome To... : The Web Developer BootcampSabina GheorgheNo ratings yet
- HMI NewDocument37 pagesHMI NewEnrique Alexander Soria GomezNo ratings yet
- Higher Education Placement SystemDocument67 pagesHigher Education Placement Systembalaay bayyanaaNo ratings yet
- Create A Crosstab Report in People AnalyticsDocument4 pagesCreate A Crosstab Report in People AnalyticsCesarNo ratings yet
- ZXA10 C300 Datasheet: Key Features Technical SpecificationsDocument3 pagesZXA10 C300 Datasheet: Key Features Technical Specificationsjavier cruzNo ratings yet
- CSC 504 - Computer Architecture II course detailsDocument6 pagesCSC 504 - Computer Architecture II course detailsعلي سعدهاشمNo ratings yet
- Unit 1 - Integrated Water Management - WWW - Rgpvnotes.inDocument12 pagesUnit 1 - Integrated Water Management - WWW - Rgpvnotes.inharshNo ratings yet
- Cloud Security - A Primer by Yogesh Gupta, CISSP® CCSK CCSP - The Cloud, Services, Standards - PeerlystDocument8 pagesCloud Security - A Primer by Yogesh Gupta, CISSP® CCSK CCSP - The Cloud, Services, Standards - PeerlystrossloveladyNo ratings yet
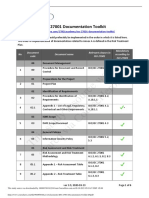
- This Study Resource Was: ISO 27001 Documentation ToolkitDocument6 pagesThis Study Resource Was: ISO 27001 Documentation Toolkitfawas hamdiNo ratings yet
- ContactsDocument5 pagesContacts7myzrm9s4sNo ratings yet
- Lifetime Support Applications 069216Document57 pagesLifetime Support Applications 069216arnoudrothNo ratings yet
- Unit 5: Advanced Server Side Issues: Database ConnectivityDocument5 pagesUnit 5: Advanced Server Side Issues: Database ConnectivityPrabin SilwalNo ratings yet
- RE For Beginners-EnDocument247 pagesRE For Beginners-EnKhodor AkoumNo ratings yet
- ch-2 DCCNDocument53 pagesch-2 DCCNMuntarin RahmanNo ratings yet
- RBIM Manual AdminDocument58 pagesRBIM Manual AdminJoefrey YuNo ratings yet
- Feedback FormDocument4 pagesFeedback FormKhushboo WarhadeNo ratings yet
- SEARCH/REPLACEDocument1 pageSEARCH/REPLACEDavid González MartínNo ratings yet
- Code GibberDocument1 pageCode Gibberlloyd24390_874347375No ratings yet
- Jeopardy TemplatesDocument9 pagesJeopardy TemplatesVANESSANo ratings yet
- Alcatel 1000 S12 - Carritech TelecommunicationsDocument2 pagesAlcatel 1000 S12 - Carritech TelecommunicationsCarritech TelecommunicationsNo ratings yet
- Troubleshooting I C Bus Protocol: Application ReportDocument10 pagesTroubleshooting I C Bus Protocol: Application ReportAbhishek BhattacharjeeNo ratings yet
- Mini ProjectDocument12 pagesMini ProjectTamizh KdzNo ratings yet
- Information Security and PrivacyDocument217 pagesInformation Security and PrivacyVIPIN CHAUDHARI100% (1)
- OCR AssignmentDocument5 pagesOCR AssignmenteyembackNo ratings yet
- Kolla AnsibleDocument210 pagesKolla AnsibleNana MardianaNo ratings yet
- ZMP - 2965288 - en - WS 2B ZB WHDocument3 pagesZMP - 2965288 - en - WS 2B ZB WHPonechor HomeNo ratings yet
- MS-102 QuestionsDocument107 pagesMS-102 QuestionsMauricio MolinaNo ratings yet
- Gadget Network MonitorDocument11 pagesGadget Network MonitorMaster22No ratings yet
- Automation Licence ManagerDocument62 pagesAutomation Licence ManagerGeo Cp100% (1)