You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
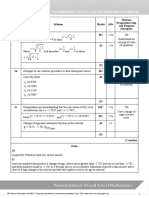
- Mark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Document7 pagesMark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Arthur LongwardNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- DLP Area of A Circle Math 5 Q4Document4 pagesDLP Area of A Circle Math 5 Q4Emz Mzz100% (2)
- Process Dynamics and Control: By: Gemechu Bushu (AAU)Document32 pagesProcess Dynamics and Control: By: Gemechu Bushu (AAU)gebreslassie gereziherNo ratings yet
- RD Sharma Class 10 SolutionsDocument2 pagesRD Sharma Class 10 SolutionsRD Sharma Solutions44% (9)
- Manufacturing Process Excellence Handout (J Bero)Document38 pagesManufacturing Process Excellence Handout (J Bero)Dann DanNo ratings yet
- Crux v1n03 MayDocument15 pagesCrux v1n03 MayacelinornNo ratings yet
- ClusteringDocument36 pagesClusteringKapildev KumarNo ratings yet
- PHY103A: Lecture # 2: Semester II, 2017-18 Department of Physics, IIT KanpurDocument21 pagesPHY103A: Lecture # 2: Semester II, 2017-18 Department of Physics, IIT KanpurSABARI BALANo ratings yet
- General Procedure of FEA 7Document30 pagesGeneral Procedure of FEA 7tauasi_1No ratings yet
- Helicopter Component Fatigue PDFDocument74 pagesHelicopter Component Fatigue PDFEtienne GerberNo ratings yet
- Brief History of Burgers EquationDocument21 pagesBrief History of Burgers EquationRojin GomezNo ratings yet
- Li 2021Document9 pagesLi 2021Smruti Ranjan PattanayakNo ratings yet
- AS 2417part 2 ISO 2548 Pumps The International Acceptance - 1Document40 pagesAS 2417part 2 ISO 2548 Pumps The International Acceptance - 1rubenNo ratings yet
- Pro Material Series: Free Placement Preparation Online Course With Free Mock Test VisitDocument30 pagesPro Material Series: Free Placement Preparation Online Course With Free Mock Test VisitBhuvanagiri YaswanthNo ratings yet
- Sir Syed University of Engineering & Technology Computer Science Department SPRING 2020 Compiler Construction (Cs-310) Comprehensive AssignmentDocument5 pagesSir Syed University of Engineering & Technology Computer Science Department SPRING 2020 Compiler Construction (Cs-310) Comprehensive AssignmentOsama Shoukat0% (1)
- UT Dallas Syllabus For Math2413.002.11f Taught by David Lewis (Dlewis)Document12 pagesUT Dallas Syllabus For Math2413.002.11f Taught by David Lewis (Dlewis)UT Dallas Provost's Technology GroupNo ratings yet
- 4-Cylindrical Vessel With External PressureDocument11 pages4-Cylindrical Vessel With External PressureSarah TwilightNo ratings yet
- Rectangular Hollow Plate-Fine Analysis-1Document14 pagesRectangular Hollow Plate-Fine Analysis-1Francisco UribeNo ratings yet
- Linear ProgrammingDocument10 pagesLinear ProgrammingGian BinondoNo ratings yet
- Progress in The Spectacle Correction of Presbyopia PDFDocument27 pagesProgress in The Spectacle Correction of Presbyopia PDFjuliogarridoNo ratings yet
- Sequence Guide - Soda Can Calorimeter Student SampleDocument3 pagesSequence Guide - Soda Can Calorimeter Student Sampleapi-334553540No ratings yet
- SudokuProject PresentationDocument11 pagesSudokuProject PresentationAlexNo ratings yet
- Serial Multiplier VerilogDocument36 pagesSerial Multiplier VerilogHugito ConnorNo ratings yet
- COMPETENCIES MATH Grades 7 - 9Document19 pagesCOMPETENCIES MATH Grades 7 - 9Unime PlazaNo ratings yet
- Advanced Quantum Field Theory Example Sheet 4: Lent 2021Document30 pagesAdvanced Quantum Field Theory Example Sheet 4: Lent 2021Aarjav JainNo ratings yet
- Prajyot: Unit I - Fundamentals of MeasurementsDocument12 pagesPrajyot: Unit I - Fundamentals of MeasurementsBhavesh BodkeNo ratings yet
- Lecture 9 MTH401 U2Document25 pagesLecture 9 MTH401 U2yunuzNo ratings yet
- R Cheat Sheet 3 PDFDocument2 pagesR Cheat Sheet 3 PDFapakuniNo ratings yet
- Interactive Drafting Por DiegoDocument493 pagesInteractive Drafting Por DiegoiagomouNo ratings yet
- Synthesis For Finite State MachinesDocument31 pagesSynthesis For Finite State MachinesvarundagarNo ratings yet