You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- HG8245H (Collect Fault Finish)Document289 pagesHG8245H (Collect Fault Finish)SanzMilanoNo ratings yet
- هيرودوتس ج2 بيروت 1887Document305 pagesهيرودوتس ج2 بيروت 1887Mhd BazziNo ratings yet
- التربية في الحضارات القديمةDocument169 pagesالتربية في الحضارات القديمةMhd BazziNo ratings yet
- Process ManagDocument25 pagesProcess ManagMhd BazziNo ratings yet
- Week 3: Linear (Sequential) Search 2. Binary Search 3. Complexity of AlgorithmsDocument15 pagesWeek 3: Linear (Sequential) Search 2. Binary Search 3. Complexity of AlgorithmsMhd BazziNo ratings yet
- Process Communication and Synchronization and SynchronizationDocument26 pagesProcess Communication and Synchronization and SynchronizationMhd BazziNo ratings yet
- Chapter 2: Function & RecursionDocument12 pagesChapter 2: Function & RecursionMhd BazziNo ratings yet
- Chap7-Interrupts (Compatibility Mode)Document16 pagesChap7-Interrupts (Compatibility Mode)Mhd BazziNo ratings yet
- Virtual Mem Isla+teacherDocument30 pagesVirtual Mem Isla+teacherMhd BazziNo ratings yet
- Monday, March 29, 2004Document32 pagesMonday, March 29, 2004Mhd BazziNo ratings yet
- 1.stack: LIFO (Last in First Out)Document12 pages1.stack: LIFO (Last in First Out)Mhd BazziNo ratings yet
- Chap10 - Mult - and - Div (Compatibility Mode)Document10 pagesChap10 - Mult - and - Div (Compatibility Mode)Mhd BazziNo ratings yet
- Digital Logic Design Ali Saleh Normal Form Sop/PosDocument11 pagesDigital Logic Design Ali Saleh Normal Form Sop/PosMhd BazziNo ratings yet
- Chap5-Directive Statements (Compatibility Mode)Document12 pagesChap5-Directive Statements (Compatibility Mode)Mhd BazziNo ratings yet
- Digital Logic Design: Ali SalehDocument36 pagesDigital Logic Design: Ali SalehMhd BazziNo ratings yet
- Chap2 GatesDocument26 pagesChap2 GatesMhd BazziNo ratings yet
- 04/10/20 Digital Logic Design - Ali Saleh 1Document14 pages04/10/20 Digital Logic Design - Ali Saleh 1Mhd BazziNo ratings yet
- File Processing: Assembly Language ProgrammingDocument8 pagesFile Processing: Assembly Language ProgrammingMhd BazziNo ratings yet
- Logic and Boolean Algebra (Kathleen and Hilbert Levitz) (Barron's, 1979)Document141 pagesLogic and Boolean Algebra (Kathleen and Hilbert Levitz) (Barron's, 1979)Mhd BazziNo ratings yet
- Data Structure: Ali KalakechDocument30 pagesData Structure: Ali KalakechMhd BazziNo ratings yet
- Gann and Fibo FanDocument6 pagesGann and Fibo FanMhd Bazzi100% (1)
- Position Sizing and Money ManagementDocument2 pagesPosition Sizing and Money ManagementMhd Bazzi100% (1)
- The Summary's Definitive Guide To Forecasting Using W.D. Gann's Square of NineDocument16 pagesThe Summary's Definitive Guide To Forecasting Using W.D. Gann's Square of NineMhd BazziNo ratings yet
- IOT SensorsDocument10 pagesIOT Sensorsudit uberoiNo ratings yet
- 16-QAM Digital ModulationDocument8 pages16-QAM Digital ModulationGowtham Sivakumar100% (1)
- At-Speed LBIST PDFDocument2 pagesAt-Speed LBIST PDFpm1611No ratings yet
- CHAPTER 6. Buses & Interfacing: Ec303 - Computer Architecture & OrganizationDocument17 pagesCHAPTER 6. Buses & Interfacing: Ec303 - Computer Architecture & OrganizationPrevenaManiamNo ratings yet
- Lecture 8 Bod DenDocument38 pagesLecture 8 Bod DenalexanderNo ratings yet
- (Platform Studies) Nathan Altice-I Am Error - The Nintendo Family Computer - Entertainment System Platform-The MIT Press (2015)Document426 pages(Platform Studies) Nathan Altice-I Am Error - The Nintendo Family Computer - Entertainment System Platform-The MIT Press (2015)ale3androskaktos100% (1)
- VHDL Type Conversion - BitWeenieDocument5 pagesVHDL Type Conversion - BitWeenieAaditya ku marNo ratings yet
- Microprocessors CSE - 341: 8086/8088 Hardware SpecificationDocument26 pagesMicroprocessors CSE - 341: 8086/8088 Hardware SpecificationIrum SabaNo ratings yet
- 42 DC Drive DC MotorDocument35 pages42 DC Drive DC MotorWidya PradiptaNo ratings yet
- Jntuk ALLResults 2012-2016 Results HubDocument3 pagesJntuk ALLResults 2012-2016 Results HubBaswamy CseNo ratings yet
- HAIR30C Service ManualDocument30 pagesHAIR30C Service ManualUEENo ratings yet
- EDLinkedDocument89 pagesEDLinkedGustavo 008No ratings yet
- 3 Winding Transformer Commissioning TestDocument5 pages3 Winding Transformer Commissioning TestRagab TolbaNo ratings yet
- Organic Thin Film TransistorsDocument38 pagesOrganic Thin Film TransistorsTabish ImranNo ratings yet
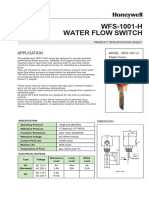
- WFS-1001-H Water Flow Switch: ApplicationDocument2 pagesWFS-1001-H Water Flow Switch: ApplicationxavierxoNo ratings yet
- Headquarter: P2 Wifi Fem P3 Wifi Pa P4 Wifi Lna Wifi Cmos Switch P5 Wifi Gaas Switch Lte Lna Gps Lna Lte Femtocell PaDocument8 pagesHeadquarter: P2 Wifi Fem P3 Wifi Pa P4 Wifi Lna Wifi Cmos Switch P5 Wifi Gaas Switch Lte Lna Gps Lna Lte Femtocell PaBouhafs AbdelkaderNo ratings yet
- Difference Between RS232, RS422, and RS485 ConvertersDocument9 pagesDifference Between RS232, RS422, and RS485 ConvertersGil Hale100% (1)
- Guidelines Fiber Optic Cables Underground InstallationDocument22 pagesGuidelines Fiber Optic Cables Underground Installationmatgar100% (1)
- A Report On Switchyard Equipment Testing (132Document11 pagesA Report On Switchyard Equipment Testing (132harsh_biharNo ratings yet
- Prof Pradip Dutta - ResumeDocument22 pagesProf Pradip Dutta - ResumeMohsin SafiNo ratings yet
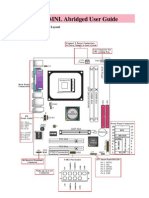
- 4PMMNL Abridged User GuideDocument4 pages4PMMNL Abridged User Guidew_muangphuanNo ratings yet
- A Project Report ON "Light Sensor": Submitted To: Submitted byDocument27 pagesA Project Report ON "Light Sensor": Submitted To: Submitted bymanvi SinghNo ratings yet
- Process Flow Chart For CFL: StartDocument2 pagesProcess Flow Chart For CFL: StartJohan Gaspar MaciasNo ratings yet
- OLED TechnologyDocument21 pagesOLED TechnologyBasavraj SNo ratings yet
- All Pass Comb FiltersDocument13 pagesAll Pass Comb Filterspho144No ratings yet
- 10CSL77 NETWORK - Lab PDFDocument39 pages10CSL77 NETWORK - Lab PDFNooruddinSahebNo ratings yet
- BCC8002 BC8002 Advanced Mainboard: Building TechnologiesDocument4 pagesBCC8002 BC8002 Advanced Mainboard: Building TechnologiestorillazNo ratings yet
- TP48200A-HX09A5 & HX09A6 & HX09A7 & DX09A2 & TBC300A-DCA6 & DCA7 & TCA3 V500R001 Installation Guide 01Document99 pagesTP48200A-HX09A5 & HX09A6 & HX09A7 & DX09A2 & TBC300A-DCA6 & DCA7 & TCA3 V500R001 Installation Guide 01Luis Lastra MorgadoNo ratings yet