You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Bombas ElectrosumergiblesDocument580 pagesBombas Electrosumergiblesyhon fredy trujilloNo ratings yet
- Starting Methods of A DC MotorDocument8 pagesStarting Methods of A DC Motoragreykato100% (1)
- O & M Manual For Boiler Circulation Pump (BCP)Document247 pagesO & M Manual For Boiler Circulation Pump (BCP)EESL AAC75% (4)
- Manual 166169Document45 pagesManual 166169Cristian Garcia100% (1)
- 004 VDL200, Functions Description and Parameters ListDocument112 pages004 VDL200, Functions Description and Parameters Listmohammad ghassanNo ratings yet
- 3kV SCR Controller For Transnet DC Series Traction MotorDocument38 pages3kV SCR Controller For Transnet DC Series Traction MotorZamani MhlongoNo ratings yet
- AC TDS ElectricalDocument226 pagesAC TDS ElectricalnobodymagdesignNo ratings yet
- Basic HydraulicsDocument70 pagesBasic HydraulicsAlex TacuriNo ratings yet
- 320XPC - Blasthole Drill - Spec SheetDocument4 pages320XPC - Blasthole Drill - Spec Sheetgoonzaalo_22No ratings yet
- Altivar Machine ATV320 - ATV320U55N4CDocument10 pagesAltivar Machine ATV320 - ATV320U55N4CPhaniNo ratings yet
- Sirio 3 12/24: Electronic Control Unit For Two 12/24 VDC MotorDocument16 pagesSirio 3 12/24: Electronic Control Unit For Two 12/24 VDC MotorderbalijalelNo ratings yet
- Design and Fabrication of Automatic Shoe Polishing Machine: Technical ReportDocument5 pagesDesign and Fabrication of Automatic Shoe Polishing Machine: Technical ReportAmogh Ananth NeermargaNo ratings yet
- Measurement and Analysis of Vibrations of Electric Motors On Board Container ShipsDocument12 pagesMeasurement and Analysis of Vibrations of Electric Motors On Board Container ShipsLeon PanaNo ratings yet
- MPL Motor BrochureDocument4 pagesMPL Motor BrochureSachin RenuseNo ratings yet
- BL BLDC Motor Specifications R1 PDFDocument6 pagesBL BLDC Motor Specifications R1 PDFoskr.bstNo ratings yet
- Motores Serie Estandar ACDocument9 pagesMotores Serie Estandar ACRiki TardiansyahNo ratings yet
- Sudamdih Incline VT ReportDocument19 pagesSudamdih Incline VT ReportRupam MandalNo ratings yet
- Design & Fabrication of 360° Flexible Drilling Machine: ArticleDocument5 pagesDesign & Fabrication of 360° Flexible Drilling Machine: ArticleDeep PatelNo ratings yet
- Electrical Data General Data: Datasheet For Three-Phase Squirrel-Cage-Motors Order Number: 1LE0102-1DB23-4AA4Document1 pageElectrical Data General Data: Datasheet For Three-Phase Squirrel-Cage-Motors Order Number: 1LE0102-1DB23-4AA4abdulloh_99No ratings yet
- 3826 - Trane Rtua 217Document20 pages3826 - Trane Rtua 217mauricio.vidalyork6735No ratings yet
- Working Principle of DC Motor: Fleming's Left Hand RuleDocument5 pagesWorking Principle of DC Motor: Fleming's Left Hand RuleKishan DixitNo ratings yet
- DC Generator - Construction, Working Principle, Types, and Applications PDFDocument1 pageDC Generator - Construction, Working Principle, Types, and Applications PDFGokul GokulNo ratings yet
- Hybrid Controller: 3-Phase BLDC Motor Control With Hall Sensors Using 56F805Document70 pagesHybrid Controller: 3-Phase BLDC Motor Control With Hall Sensors Using 56F805Truong Quang Minh PH 1 8 9 0 4No ratings yet
- Mechatronics: Learning Resources Unit Wise Compiled by Dr. A. P. Sathiyagnanam Assistant ProfessorDocument111 pagesMechatronics: Learning Resources Unit Wise Compiled by Dr. A. P. Sathiyagnanam Assistant Professornilanjan_kar_2No ratings yet
- Robotics Book Unit 1 & 2Document33 pagesRobotics Book Unit 1 & 2arun193905No ratings yet
- Multivector Pec ExamDocument24 pagesMultivector Pec ExamEssej OrtsacNo ratings yet
- 100% Fresh Air Air-Conditioner Range: 100% Fresh Air PHX Reverse Cycle Rooftop Package UnitDocument12 pages100% Fresh Air Air-Conditioner Range: 100% Fresh Air PHX Reverse Cycle Rooftop Package UnithtanhNo ratings yet
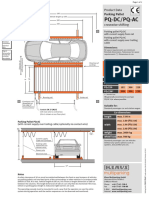
- Pq-Dc/Pq-Ac: Parking PalletDocument5 pagesPq-Dc/Pq-Ac: Parking PalletRafael SalgadoNo ratings yet
- 06-2 F Grease Lubrication PumpsDocument14 pages06-2 F Grease Lubrication Pumpsyudistira bataviapcNo ratings yet
- m07500670 00000000 0en PDFDocument272 pagesm07500670 00000000 0en PDFPaulAbiNasrNo ratings yet