You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Jesd209 2FDocument284 pagesJesd209 2Fhuan nguyenNo ratings yet
- IntroToBluetoothHacking CarolinaCon2012Document50 pagesIntroToBluetoothHacking CarolinaCon2012HaQueXNo ratings yet
- Posonic Catalogue Feb 2009Document66 pagesPosonic Catalogue Feb 2009Nicolas Gutierrez100% (1)
- LCD ManualDocument56 pagesLCD ManualSebastian ClavijoNo ratings yet
- (Oct. 16, 1972) RFC 407 NIC 12112Document42 pages(Oct. 16, 1972) RFC 407 NIC 12112NickyNETNo ratings yet
- Cortex-M4 Part1Document65 pagesCortex-M4 Part1shaliniNo ratings yet
- OOP Part1Document24 pagesOOP Part1Arnel ManggaNo ratings yet
- © 2019 - Whitehat Education Technology Private Limited. Please Don'T Share, Download or Copy This File Without PermissionDocument27 pages© 2019 - Whitehat Education Technology Private Limited. Please Don'T Share, Download or Copy This File Without Permissionstudent whitehat jrNo ratings yet
- Mangalore Institute of Technology and Engineering, Moodabidri. C-Programming For Problem Solving - 22POP13Document12 pagesMangalore Institute of Technology and Engineering, Moodabidri. C-Programming For Problem Solving - 22POP13unknown MeNo ratings yet
- Case Study On Windows PDFDocument15 pagesCase Study On Windows PDFJPC RTK100% (1)
- Cambridge International Advanced Subsidiary and Advanced LevelDocument20 pagesCambridge International Advanced Subsidiary and Advanced LevelAl-Sami MashrafeeNo ratings yet
- Ut62256cpc 70LLDocument12 pagesUt62256cpc 70LLElida Sari LubisNo ratings yet
- Taxonomy of Architectural StylesDocument4 pagesTaxonomy of Architectural StylesMason MountNo ratings yet
- Cdi4a Lab2 2ADocument3 pagesCdi4a Lab2 2ADegay Cristy DegayNo ratings yet
- r16 Syllabus Cse JntuhDocument58 pagesr16 Syllabus Cse Jntuhramakanth83No ratings yet
- Fdocuments - in Catia Vba Guide v5 Macro Programming With Visual Basic Write Powerful CustomDocument4 pagesFdocuments - in Catia Vba Guide v5 Macro Programming With Visual Basic Write Powerful CustomHermano Castro0% (1)
- Parallel DFS and BFSDocument35 pagesParallel DFS and BFSGeeta MeenaNo ratings yet
- Ahmed Gomaa 2023Document6 pagesAhmed Gomaa 2023Ahmed GomaaNo ratings yet
- DocuCentrer-VI Administrator GuideDocument889 pagesDocuCentrer-VI Administrator GuideSak Na ThungkruNo ratings yet
- LabDocument16 pagesLabrobaeyi0% (1)
- Omt Cable To Du For Rbs 6000sDocument2 pagesOmt Cable To Du For Rbs 6000sAfzainizam Daud83% (6)
- WJ9 JDTMFController V5Document41 pagesWJ9 JDTMFController V5commit_to_truthNo ratings yet
- Flip Flop NotesDocument18 pagesFlip Flop NotesmishrasrahulNo ratings yet
- Core Java BasicsDocument25 pagesCore Java BasicsAnil Kumar BandariNo ratings yet
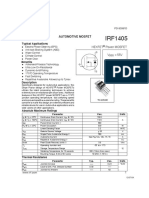
- Automotive Mosfet: Typical ApplicationsDocument10 pagesAutomotive Mosfet: Typical ApplicationsSaikumarNo ratings yet
- Sap RouterDocument3 pagesSap RouterRamesh KanakalaNo ratings yet
- Project of Analog and Digital Communication SystemDocument8 pagesProject of Analog and Digital Communication SystemsohaibNo ratings yet
- General Presentation With Some References - 2020-11-05 - PT LENDocument65 pagesGeneral Presentation With Some References - 2020-11-05 - PT LENIrfan GunawanNo ratings yet
- DS - Automatic Cable Test Van - Titron - BAUR - En-Gb - 2Document7 pagesDS - Automatic Cable Test Van - Titron - BAUR - En-Gb - 2Tri Ari WibowoNo ratings yet
- PZM TouchscreenDocument4 pagesPZM TouchscreenRajesh Selva RajNo ratings yet