You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- MARY, Woman of Faith, Hope, Love (Lyrics & Chords)Document2 pagesMARY, Woman of Faith, Hope, Love (Lyrics & Chords)Jessa Marie Maquiling88% (8)
- Rasi Navamsa: As Mo Ke Su Ve Mo JuDocument11 pagesRasi Navamsa: As Mo Ke Su Ve Mo JuRavan SharmaNo ratings yet
- Cosep v. People PDFDocument8 pagesCosep v. People PDFAlyssa Fatima Guinto SaliNo ratings yet
- Structure Fires Caused by Hot Work: Marty AhrensDocument14 pagesStructure Fires Caused by Hot Work: Marty AhrensBurgosg ValeryNo ratings yet
- MGW Health CheckDocument2 pagesMGW Health Checkkaramdo0% (1)
- CAT LOGO ALPINESTARS OFF-ROAD 2021Document73 pagesCAT LOGO ALPINESTARS OFF-ROAD 2021Carla ArcosNo ratings yet
- The Entheogen Review׃ Vol. 16, No. 1 (2008)Document44 pagesThe Entheogen Review׃ Vol. 16, No. 1 (2008)HoorayFrisbeeHead100% (2)
- Usability Test Report MemoDocument2 pagesUsability Test Report MemoTiffany PetersonNo ratings yet
- Fixed Asset Examples Excel TemplateDocument6 pagesFixed Asset Examples Excel TemplateHR BabitaNo ratings yet
- Citing SourcesDocument37 pagesCiting Sourcesasquared29No ratings yet
- Global Business CH 2 2-MergedDocument58 pagesGlobal Business CH 2 2-MergedJace gunnerNo ratings yet
- Module 2 Tssig Week 2 3Document4 pagesModule 2 Tssig Week 2 3Alysa QuintanarNo ratings yet
- How To FingerDocument18 pagesHow To FingerAgiabAbera100% (1)
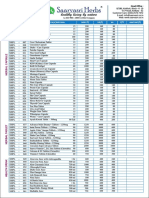
- SHPL Product Order Form 2021Document4 pagesSHPL Product Order Form 2021anuradha100% (3)
- 22445-2022-Summer-Model-Answer-Paper (Msbte Study Resources)Document27 pages22445-2022-Summer-Model-Answer-Paper (Msbte Study Resources)Piyush NikamNo ratings yet
- Cybersecurity in Operational Technology: Special ReportDocument15 pagesCybersecurity in Operational Technology: Special ReportAdrian ReyesNo ratings yet
- Cse205 Computer-Architecture-And-Organization TH 2.00 Ac26Document2 pagesCse205 Computer-Architecture-And-Organization TH 2.00 Ac26Ravi ThejaNo ratings yet
- Facilities 2013 SG - Full Time, 2nd YearDocument49 pagesFacilities 2013 SG - Full Time, 2nd Yearsaifasad100% (2)
- 1908 The Watchower and Herald of Christ's PresenceDocument193 pages1908 The Watchower and Herald of Christ's PresenceTimothy RichesNo ratings yet
- Edavaka VillageDocument160 pagesEdavaka VillageGokul KrishnaNo ratings yet
- Jeeadv 2022 Press ReleaseDocument6 pagesJeeadv 2022 Press ReleaseIzumiNo ratings yet
- Metal Gear Solid - Characters Profile and TimelineDocument65 pagesMetal Gear Solid - Characters Profile and Timelinekrevorkian1653100% (1)
- Phys172 S20 Lab07 FinalDocument8 pagesPhys172 S20 Lab07 FinalZhuowen YaoNo ratings yet
- Reynald Hernandez: ExperienceDocument2 pagesReynald Hernandez: ExperienceRey HernandezNo ratings yet
- Article Role of Zinc Post-Injury Wound Healing: Special inDocument3 pagesArticle Role of Zinc Post-Injury Wound Healing: Special inVinicio Rodriguez MirandaNo ratings yet
- Project PlanDocument3 pagesProject PlanEarl Dave NangganNo ratings yet
- ALVAREZ, John Edriane A - Experiment No. 1Document7 pagesALVAREZ, John Edriane A - Experiment No. 1John Edriane AlvarezNo ratings yet
- Formula and Functions in MS ExcelDocument9 pagesFormula and Functions in MS ExcelBhavana SangamNo ratings yet
- PointgroupsDocument13 pagesPointgroupsT alameluNo ratings yet