You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Self-Assessment Form Instructions For Applicants: Page 1 of 10Document10 pagesSelf-Assessment Form Instructions For Applicants: Page 1 of 10ahmedNo ratings yet
- Installation and Operation Manual: EM-35 Digital Driver (Single and Dual Feedback)Document28 pagesInstallation and Operation Manual: EM-35 Digital Driver (Single and Dual Feedback)jorge HewitsonNo ratings yet
- PM-9000 Express Service Manual-3.2Document109 pagesPM-9000 Express Service Manual-3.2JUANHERRERA410% (1)
- Signals and Systems Lecture NotesDocument41 pagesSignals and Systems Lecture Notesباسم رجبNo ratings yet
- Design of A Li-Fi TransceiverDocument16 pagesDesign of A Li-Fi TransceiverEdwin KnoxNo ratings yet
- 18ecc204j - DSP - Week 1Document57 pages18ecc204j - DSP - Week 1Ankur JhaNo ratings yet
- The Wavelet Tutorial Part II by Robi PolikarDocument14 pagesThe Wavelet Tutorial Part II by Robi PolikarTekno MedNo ratings yet
- Articulacion HubnerDocument76 pagesArticulacion HubnerSergio Rincon100% (2)
- DR120XADocument14 pagesDR120XAJose BerrospiNo ratings yet
- SAWFilter PDFDocument350 pagesSAWFilter PDFCube7 GeronimoNo ratings yet
- Hysense QT 100 / QT 110: Turbine Volume Ow SensorDocument5 pagesHysense QT 100 / QT 110: Turbine Volume Ow SensorMilos BubanjaNo ratings yet
- Hermetic Canned PumpDocument16 pagesHermetic Canned PumpYlm PtanaNo ratings yet
- 4MationF PDFDocument31 pages4MationF PDFobi SalamNo ratings yet
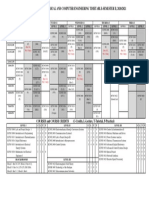
- Department of Electrical and Computer Engineering Timetable-Semester Ii, 2020/2021Document1 pageDepartment of Electrical and Computer Engineering Timetable-Semester Ii, 2020/2021Ameera ChaitramNo ratings yet
- Objective:: Analyze Pulse Code Modulation SystemDocument54 pagesObjective:: Analyze Pulse Code Modulation SystemRed SafireNo ratings yet
- Medfusion 3500 Syringe Pump ServiceDocument4 pagesMedfusion 3500 Syringe Pump ServiceAhmadNo ratings yet
- Signals and SystemsDocument22 pagesSignals and Systemsvnrao61No ratings yet
- Bussmann 22x58 CH221BDocument7 pagesBussmann 22x58 CH221BRichard HernandezNo ratings yet
- List Alarm EnshuDocument438 pagesList Alarm EnshuWidya LalaNo ratings yet
- Fieldbus: Fieldbus Comparison Chart 28 KB Fieldbus and Remote I/O Comparison 1.3 MBDocument14 pagesFieldbus: Fieldbus Comparison Chart 28 KB Fieldbus and Remote I/O Comparison 1.3 MBsifusz100% (1)
- PID+Fuzzy Temperature ControllerDocument23 pagesPID+Fuzzy Temperature ControllerWilly TurdoNo ratings yet
- Numerical Non Directional Overcurrent Protection Relay TypeDocument4 pagesNumerical Non Directional Overcurrent Protection Relay TypeSudipta HalderNo ratings yet
- Ecg Monitoring SystemDocument7 pagesEcg Monitoring SystemGestión WebNo ratings yet
- Shazam Princeton ELE201Document7 pagesShazam Princeton ELE201Ishaan SrivastavaNo ratings yet
- Wheatstone Baseband192 WhitePaperDocument6 pagesWheatstone Baseband192 WhitePaperNAdreaNo ratings yet
- Arduino ADCDocument4 pagesArduino ADCVisawjeetMallikNo ratings yet
- Programmable Digital TimerDocument5 pagesProgrammable Digital TimerPrasadPurohitNo ratings yet
- B7 2-BUS ZF Ecomat2 4 Impianto Elettrico enDocument46 pagesB7 2-BUS ZF Ecomat2 4 Impianto Elettrico enJan KoutňákNo ratings yet
- Maxwell-User Manual (MTB Controller)Document3 pagesMaxwell-User Manual (MTB Controller)جمال ابو الفضلNo ratings yet
- Hyperlynx A PWB Design ToolDocument42 pagesHyperlynx A PWB Design Toolfet_50No ratings yet