You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Moments WorksheetDocument2 pagesMoments Worksheetarieljuwo80% (5)
- Facilitating Learning NOTESDocument19 pagesFacilitating Learning NOTESDhanzNo ratings yet
- Mechanical Calculation On The Flexible Bearing ofDocument8 pagesMechanical Calculation On The Flexible Bearing ofJojee MarieNo ratings yet
- Kumho KNB 35l - Ghs Msds (En)Document8 pagesKumho KNB 35l - Ghs Msds (En)Jojee MarieNo ratings yet
- A Review of Rolling Contact FatigueDocument16 pagesA Review of Rolling Contact FatigueJojee MarieNo ratings yet
- Test Design and Result Interpretation Methods For Evaluating Rolling Contact Fatigue Life To Maintain Both Efficiency and ReliabilityDocument8 pagesTest Design and Result Interpretation Methods For Evaluating Rolling Contact Fatigue Life To Maintain Both Efficiency and ReliabilityJojee MarieNo ratings yet
- Gearboxashu1 150911200033 Lva1 App6891Document80 pagesGearboxashu1 150911200033 Lva1 App6891Jojee MarieNo ratings yet
- Gearing Basic 1 : 1 Classification of Gears 1.1 What Is A Gear? 1.2 Shaft Arrangement 1.3 Gear TypesDocument21 pagesGearing Basic 1 : 1 Classification of Gears 1.1 What Is A Gear? 1.2 Shaft Arrangement 1.3 Gear TypesJojee MarieNo ratings yet
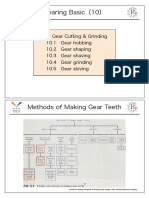
- GearingBasic 02Document20 pagesGearingBasic 02Jojee MarieNo ratings yet
- GearingBasic 03Document14 pagesGearingBasic 03Jojee MarieNo ratings yet
- Mechanical Properties: - Elastic Deformation - Plastic Deformation - FractureDocument14 pagesMechanical Properties: - Elastic Deformation - Plastic Deformation - FractureJojee MarieNo ratings yet
- Accelerated Life Testing of Harmonic Driver in Space LubricationDocument12 pagesAccelerated Life Testing of Harmonic Driver in Space LubricationJojee MarieNo ratings yet
- Case Studies in Engineering Failure Analysis: Selc Uk Can Yu Cel, Levent O Zenli, Tu Rker Genc Ol, Ersoy AlanyalıDocument12 pagesCase Studies in Engineering Failure Analysis: Selc Uk Can Yu Cel, Levent O Zenli, Tu Rker Genc Ol, Ersoy AlanyalıJojee MarieNo ratings yet
- Problem of The Month April 2001-Weibull Beta Slopes For Ball BearingsDocument7 pagesProblem of The Month April 2001-Weibull Beta Slopes For Ball BearingsJojee MarieNo ratings yet
- 3.2 Unit Conversion Homework AnswersDocument4 pages3.2 Unit Conversion Homework Answersafmcmuugo100% (1)
- 15 Audit SamplingDocument7 pages15 Audit Samplingrandomlungs121223No ratings yet
- Electric Flux DensityDocument15 pagesElectric Flux DensityTrinala KinantiNo ratings yet
- Optimum Design of Reinforced Concrete Rectangular Beams Using Simulated AnnealingDocument10 pagesOptimum Design of Reinforced Concrete Rectangular Beams Using Simulated AnnealingAndripgaNo ratings yet
- Assignment I - ITC 2023Document2 pagesAssignment I - ITC 2023Saket GoluNo ratings yet
- Summary of ProgressDocument9 pagesSummary of ProgressJ SANDHYANo ratings yet
- Effect of Exhaust Grille Position On Air Quality and Flow PatternsDocument9 pagesEffect of Exhaust Grille Position On Air Quality and Flow Patternshesham metwallyNo ratings yet
- Zijun Zhou ResumeDocument4 pagesZijun Zhou Resumeapi-355635832No ratings yet
- Analysis and Design of Continuous Prestressed Concrete Bridge Based On Construction SequenceDocument9 pagesAnalysis and Design of Continuous Prestressed Concrete Bridge Based On Construction SequenceThaiAnhBoNo ratings yet
- Standard Test Procedure RHD - BDDocument348 pagesStandard Test Procedure RHD - BDgazi sharif100% (3)
- Cut and Fill PresentationDocument23 pagesCut and Fill PresentationMuhammad Faiz bin Ahmad Shafi63% (8)
- HFSSDocument40 pagesHFSSSarath valanukondaNo ratings yet
- Elliptic Curve Cryptography: Presented By: Mrs. S J Patel Department of Computer Engineering, Nit, SuratDocument53 pagesElliptic Curve Cryptography: Presented By: Mrs. S J Patel Department of Computer Engineering, Nit, SuratSudha PatelNo ratings yet
- Process Control Lecture 5 - DR Pratik N Sheth - BITS PDFDocument20 pagesProcess Control Lecture 5 - DR Pratik N Sheth - BITS PDFManik BansalNo ratings yet
- Kathy Mae F. Daclan (Experimental Design Final)Document7 pagesKathy Mae F. Daclan (Experimental Design Final)YHTAK1792No ratings yet
- Operations of FractionsDocument2 pagesOperations of FractionsMl PhilNo ratings yet
- Cardinal Utility AnalysisDocument17 pagesCardinal Utility AnalysisJayant SinglaNo ratings yet
- Cryptographic Techniques With CrypttoolDocument91 pagesCryptographic Techniques With CrypttoolRobin RohitNo ratings yet
- Risk Management PolicyDocument1 pageRisk Management PolicyChauhan VineetNo ratings yet
- Q1. Modify The MATLAB Code For Jacobi's Iterative ...Document6 pagesQ1. Modify The MATLAB Code For Jacobi's Iterative ...Malik AsadNo ratings yet
- Elisa Validation PlanDocument1 pageElisa Validation PlanpiagiopersempreNo ratings yet
- Logics: Discrete Structures For Computing On March 18, 2020Document41 pagesLogics: Discrete Structures For Computing On March 18, 2020Vũ Trần MinhNo ratings yet
- 1 Introduction To EconometricsDocument12 pages1 Introduction To Econometricsdevesh_mendiratta_61No ratings yet
- Overfitting and Underfitting in Machine LearningDocument3 pagesOverfitting and Underfitting in Machine LearningZahid JavedNo ratings yet
- Corr and RegressDocument61 pagesCorr and Regresskamendra chauhanNo ratings yet
- 978 3 030 99524 9 PDFDocument591 pages978 3 030 99524 9 PDFMasala NetshivhodzaNo ratings yet
- 10th Pairing Scheme 2018 2020Document5 pages10th Pairing Scheme 2018 2020Muhammad Kashif Zaman100% (1)