You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- State Government Scheme 2020-2021 UpdatedDocument14 pagesState Government Scheme 2020-2021 UpdatedPrakshi SaxenaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Rasoning SBI PO PRE-ADocument39 pagesRasoning SBI PO PRE-APrakshi SaxenaNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- APARCHIT SUPER CURRENT AFFAIRS 350+ WITH FACTS October SET 3Document85 pagesAPARCHIT SUPER CURRENT AFFAIRS 350+ WITH FACTS October SET 3Prakshi SaxenaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- APARCHIT SUPER CURRENT AFFAIRS 350+ WITH FACTS October SETDocument295 pagesAPARCHIT SUPER CURRENT AFFAIRS 350+ WITH FACTS October SETPrakshi SaxenaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Reasoning DS Combo PO PreDocument77 pagesReasoning DS Combo PO PrePrakshi SaxenaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- APARCHIT SUPER CURRENT AFFAIRS 350+ WITH FACTS November SET 1Document76 pagesAPARCHIT SUPER CURRENT AFFAIRS 350+ WITH FACTS November SET 1Prakshi SaxenaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- APARCHIT SUPER CURRENT AFFAIRS 350+ WITH FACTS October SET 2Document67 pagesAPARCHIT SUPER CURRENT AFFAIRS 350+ WITH FACTS October SET 2Prakshi SaxenaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- APARCHIT SUPER CURRENT AFFAIRS 350+ WITH FACTS August SET 4Document66 pagesAPARCHIT SUPER CURRENT AFFAIRS 350+ WITH FACTS August SET 4Prakshi SaxenaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- ABHYAAS October Magazine UpdatedDocument337 pagesABHYAAS October Magazine UpdatedPrakshi SaxenaNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Trane CoilDocument47 pagesTrane CoilSam Wang Chern Peng100% (5)
- Powermax Catalogue (Thermax)Document5 pagesPowermax Catalogue (Thermax)tydusgaravaeaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Boiler & Pressure Plant Insurance Claim Form: A. Insured DetailsDocument2 pagesBoiler & Pressure Plant Insurance Claim Form: A. Insured Detailshappy39No ratings yet
- GameFAQs Breath of Fire II (SNES) Dragon FAQ by RaiuDocument9 pagesGameFAQs Breath of Fire II (SNES) Dragon FAQ by RaiulizardonNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Building Rural RoadsDocument116 pagesBuilding Rural RoadsAnjang NugrohoNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Catalogo ToolfloDocument236 pagesCatalogo ToolfloRafael Enrique Zhicay OrdoñezNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Transistores: N0 Ref DescripDocument11 pagesTransistores: N0 Ref DescripPedro AlvarezNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Authored Article - Smartphone Re-Commerce in IndiaDocument4 pagesAuthored Article - Smartphone Re-Commerce in IndiaSanjay MalaraNo ratings yet
- Desalting EfficiencyDocument5 pagesDesalting EfficiencyKandanNo ratings yet
- IMAXDocument57 pagesIMAXNaveen Kumar0% (2)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Binder 1Document140 pagesBinder 1tran xobon100% (4)
- Demobilisation Assurance ChecklistDocument3 pagesDemobilisation Assurance ChecklistNazrin SHONo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Technical Catalogue: June JuneDocument9 pagesTechnical Catalogue: June JunehaggNo ratings yet
- Planning Considerations For Ice PlantsDocument5 pagesPlanning Considerations For Ice PlantsribozymesNo ratings yet
- An Article On Tank Bulging Effect or Bulging Effect of Tank ShellsDocument4 pagesAn Article On Tank Bulging Effect or Bulging Effect of Tank ShellsiaftNo ratings yet
- Spitfire MK 26B: Supermarine Aircraft Pty LTDDocument18 pagesSpitfire MK 26B: Supermarine Aircraft Pty LTDKen AmundsenNo ratings yet
- Service and Maintenance: Engineered Smoke Control System Fire Protection SystemDocument12 pagesService and Maintenance: Engineered Smoke Control System Fire Protection SystemChen MingliangNo ratings yet
- Rev.0 CSI 2600 PDFDocument170 pagesRev.0 CSI 2600 PDFAnonymous srwHCpANo ratings yet
- Introduction To OkrsDocument37 pagesIntroduction To Okrssandeep11661100% (6)
- Silfab SIL 330 BL 20200910 FinalDocument2 pagesSilfab SIL 330 BL 20200910 Finalboyz535261No ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Handbook of Analytical Methods of Analysing MaterialsDocument57 pagesHandbook of Analytical Methods of Analysing MaterialsAzuriak1No ratings yet
- Galactic CityDocument6 pagesGalactic CityPulinSrivastavaNo ratings yet
- 5.SM Ch05 Five Generic StrategiesDocument10 pages5.SM Ch05 Five Generic StrategiesaryoooiiiiiNo ratings yet
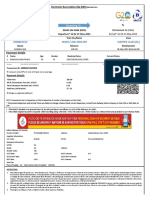
- Train Ticket 27 May 2023Document1 pageTrain Ticket 27 May 2023Upgrade M.S. SuklaNo ratings yet
- Waste ManagementDocument43 pagesWaste Managementالدنيا ساعة فاجعلها طاعةNo ratings yet
- R12 White Paper On Automatic Creation of Bank Account Transfer Through Sweep Transaction and Cash Leveling ProgramDocument35 pagesR12 White Paper On Automatic Creation of Bank Account Transfer Through Sweep Transaction and Cash Leveling ProgramrpillzNo ratings yet
- Test 1 Unit 5 - Grade 10Document9 pagesTest 1 Unit 5 - Grade 10Hường NgôNo ratings yet
- Attachment 10Document4 pagesAttachment 10dianNo ratings yet
- Chapter 28 - Fuel System: BHT-206A/B-SERIES-MM-4Document48 pagesChapter 28 - Fuel System: BHT-206A/B-SERIES-MM-4Huda LestraNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hiqpdf Software: HTML To PDF ConverterDocument1 pageHiqpdf Software: HTML To PDF ConverterShivani RanaNo ratings yet