Professional Documents
Culture Documents
QRS Tutorial PDF
Uploaded by
C Adriana RalucaOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
QRS Tutorial PDF
Uploaded by
C Adriana RalucaCopyright:
Available Formats
The Principles of
Software QRS Detection
© 1989-99 TECH POOL STUDIOS, INC.
Reviewing and Comparing Algorithms for
Detecting this Important ECG Waveform
he QRS complex is the most striking the original papers that are referenced at
T waveform within the electrocardio- the end of this article.
gram (ECG). Since it reflects the electri- Beyond QRS detection, many papers
cal activity within the heart during the have been published in related fields; e.g.,
ventricular contraction, the time of its ECG signal enhancement [15, 17, 23, 28,
occurrence as well as its shape provide 90, 99] or pattern classification [8, 26, 31,
much information about the current state 40, 62, 63, 70, 71, 72, 108, 113, 119]. The
of the heart. Due to its characteristic algorithms described in these papers are
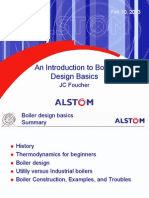
shape (see Fig. 1) it serves as the basis for not the topic of this article. However, al-
the automated determination of the heart though not directly applied to QRS detec-
rate, as an entry point for classification tion, many of these algorithms may be
schemes of the cardiac cycle, and often it useful in processing stages prior to QRS
is also used in ECG data compression al- detection.
gorithms. In that sense, QRS detection
provides the fundamentals for almost all Overview
automated ECG analysis algorithms. The rapid development of powerful
Software QRS detection has been a re- microcomputers promoted the wide-
search topic for more than 30 years. The spread application of software QRS de-
evolution of these algorithms clearly re- tection algorithms in cardiological
flects the great advances in computer devices. Beginning about 30 years ago,
technology. Whereas in the early years software QRS detection has replaced
the computational load determined the more and more hardware QRS detectors.
complexity and therefore the perfor- Already in the early years of auto-
mance of the algorithms, nowadays the mated QRS detection, an algorithmic
detection performance is the major devel- structure was developed that is now
Bert-Uwe Köhler, Carsten Hennig, opment objective. The computational shared by many algorithms. As shown in
Reinhold Orglmeister load becomes less and less important. Fig. 2 it is divided into a preprocessing or
Department of Electrical Engineering, The only exception from this trend is feature extraction stage including linear
Biomedical Electronics Group, probably the development of QRS detec- and nonlinear filtering and a decision
Berlin University of Technology tion algorithms for battery-driven de- stage including peak detection and deci-
vices. sion logic. Often an extra processing
Within the last decade many new ap- block is used for the exact determination
proaches to QRS detection have been of the temporal location of the assumed
proposed; for example, algorithms from QRS candidate. In this article the different
the field of artificial neural networks [47, algorithms are discriminated with respect
105, 119, 122], genetic algorithms [91], to their preprocessing stages, because
wavelet transforms, filter banks [2, 54, most of the decision stages are rather heu-
66] as well as heuristic methods mostly ristic and dependent on the preprocessing
based on nonlinear transforms [59, 107, results.
114]. It is the intention of the authors to
provide an overview of these recent de- Approaches Based on Signal
velopments as well as of formerly pro- Derivatives and Digital Filters
posed algorithms that were already Typical frequency components of a
reviewed in [34, 51, 84]. The overview is QRS complex range from about 10 Hz to
focused on the description of the princi- about 25 Hz. Therefore, almost all QRS de-
ples. Algorithmic details can be found in tection algorithms use a filter stage prior to
42 IEEE ENGINEERING IN MEDICINE AND BIOLOGY 0739-5175/02/$17.00©2002IEEE January/February 2002
the actual detection in order to attenuate z(n ) = 13 . | y 2 (n )|,
. | y1 (n )|+11 (8) QRS-like feature values [3, 7, 33, 38, 45,
other signal components and artifacts, such 78, 81, 103].
or a linear combination of the smoothed
as P-wave, T-wave, baseline drift, and
first derivative magnitude and the magni- Algorithms Based on Digital Filters
incoupling noise. Whereas the attenuation
tude of the second derivative [3] Algorithms based on more sophisti-
of the P- and T-wave as well as baseline
drift requires high-pass filtering, the sup- z(n ) = ~
y (n )+| y (n )|
1 2 (9) cated digital filters were published in [12,
26, 29, 30, 41, 55, 65, 67, 81, 83, 85, 101,
pression of incoupling noise is usually ac- where ~y1 (n ) = {0.25, 0.5, 0.25}*| y1 (n )| and 106, 107, 123].
complished by a low-pass filter. The * denotes the linear convolution operator.
combination of low and high pass means In [83] an algorithm is proposed where
The detection of a QRS complex is ac- the ECG is filtered in parallel by two dif-
effectively the application of a bandpass complished by comparing the feature
filter, in this case with cut-off frequencies ferent low-pass filters with different
against a threshold. Usually the threshold cut-off frequencies. The difference be-
at about 10 Hz and 25 Hz. levels are computed signal dependent
In many algorithms, high- and low-pass tween the filter outputs is effectively the
such that an adaption to changing signal bandpass filtered ECG y1 (n ), which is af-
filtering are carried out separately. Some characteristics is possible. For the feature
algorithms, such as [3, 7, 33, 38, 45, 78, terwards further processed by
in Eq. (7), the threshold [33, 38, 78]
83], use only the high-pass filter part. The m
2
filtered signals are then used for the gener- Θ x = 0.3K0.4 ⋅ max[ x ] (10) y 2 (n ) = y1 (n ) ∑ y12 (n + k) .
ation of a feature signal in which the occur- k=−m (11)
is proposed, where the maximum is deter-
rence of a QRS complex is detected by mined online or from the current signal This nonlinear operation leads to a rel-
comparing the feature against fixed or segment. Most QRS detectors use this or a ative suppression of small values and a
adaptive thresholds. Almost all algorithms similar method to determine the threshold. slight smoothing of the peaks. The feature
use additional decision rules for the reduc- The peak detection logic is frequently signal z(n ) is formed out of y 2 (n ) by putt-
tion of false-positive detections. completed by further decision rules that ing additional sign constraints on the out-
are applied in order to reduce the number put signal of the low pass with the higher
Derivative-Based Algorithms of false-positive detections. Such rules cut-off frequency. The threshold is com-
The high-pass filter is often, in particu- usually put heuristically found constraints puted adaptively by Θ = max[ z(n )] / 8.
lar in the older algorithms, realized as a on the timing and the sign of the features In [106] and [107] the MOBD (multi-
differentiator. This points out the usage of or introduce secondary thresholds to ex- plication of backward difference) algo-
the characteristic steep slope of the QRS clude non-QRS segments of the ECG with rithm is proposed. It is essentially an
complex for its detection. Difference
equations of possible differentiator filters
are [3, 7, 33, 38, 45, 78, 83]
y1 (n ) = x(n +1) − x(n −1) (1)
R-Wave
y1 (n ) = 2 x(n + 2) + x(n +1)
− x(n −1) − 2 x(n − 2) (2) T-Wave
P-Wave
y1 (n ) = x(n ) − x(n −1) (3)
y1 (n ) = ~
x (n ) − ~
x (n −1) (4)
where
~ | x(n )| | x(n )| ≥ Θ
x (n ) = Q-Wave
S-Wave
Θ | x(n )| < Θ. (5)
and Θ is an amplitude threshold deter-
QRS Complex
mined from the measured ECG signal
x(n ). In most cases, the differentiator from 1. The QRS complex within the ECG signal.
Eq. (1) is used. Some algorithms also
compute the second derivative. It can be
estimated by [3, 7]
y 2 (n ) = x (n + 2) − 2 x(n ) + x(n − 2). (6)
Peak
Typical features z(n ) of such algo- ECG
Linear Nonlinear
Detection Decision
Filtering Filtering
rithms are the differentiated signal itself x(n) Logic
[33, 38, 78]
Preprocessing Stage Decision Stage
z(n ) = y1 (n ), (7)
a linear combination of the magnitudes of
the first and the second derivative [7] 2. Common structure of the QRS detectors.
January/February 2002 IEEE ENGINEERING IN MEDICINE AND BIOLOGY 43
wards differentiated. The feature signal z(n ) where the positive threshold coefficient
The detection of a is computed by squaring and averaging the
output of the differentiator. The bandpass
τ <1 is a design parameter.
In [67] the feature signal z(n ) is com-
and differentiator use filter coefficients that puted in a way similar to [41] and [85] but
QRS complex is are particularly suited for an implementa- using different filters. In contrast to [41]
tion on fixed-point processors with a short and [85], the feature signal is divided into
word length. For the peak detection, a vari- segments of 15 points. The maximum of
accomplished by able v is introduced that contains the value each segment is compared to an adaptive
of the most recent feature maximum. Peaks noise level and an adaptive peak level esti-
comparing the feature in the feature signal are detected by compar- mate and classified depending on the dis-
ing the feature againstv. If the feature drops tance to each of the estimates. The fiducial
below v 2 a peak is detected. Then the cur- point of the QRS complex is set to the loca-
against a threshold. rent value of v is taken as the peak height tion within the QRS segment where the
and v is reset to the current value of the fea- maximum of the ECG and a zero crossing
ture signal; i.e., v = z(n ). The principle of in its first derivative occur at the same time.
the peak detection is shown in Fig. 3. The Although [26] describes an ECG
fiducial mark is set to the location of the waveform detection by neural networks,
largest peak in the bandpass-filtered signal the QRS detection is accomplished using
in an interval from 225 ms to 125 ms pre- a feature extractor based on digital filter-
AND-combination of adjacent magnitude ceding a peak detection. The fiducial mark ing. The feature signal z(n ) is generated by
values of the derivative. The MOBD of and the height of the peak are put into an filtering the ECG with two different
the order N is then defined by event vector that is further processed by the bandpass filters and afterwards multiply-
N −1 decision stage. In the decision stage, a QRS ing the filter outputs w (n ) and f (n ); i.e.,
z(n ) = ∏| x(n − k) − x(n − k −1)|. peak level LP and a noise level LN are esti-
z(n ) = w (n ) ⋅ f (n ). (17)
k=0 (12) mated recursively by
In order to avoid a high feature signal LP (n ) = λ P ⋅ LP (n −1) + (1 − λ P ) ⋅ AP This procedure is based on the assump-
during noisy segments, an additional sign tion that a QRS complex is characterized
consistency constraint is imposed; i.e., (14) by simultaneously occurring frequency
components within the passbands of the
z(n ) = 0 two bandpass filters. The multiplication
LN (n ) = λ N ⋅ LN (n −1) + (1 − λ N ) ⋅ AP ,
if sign[ x(n − k)] ≠ sign[ x(n − k −1)], operation performs the AND-combina-
(13) (15) tion. That is, only if both filter outputs are
where k = 0,1, K, N − 2. A proposed value where λ N and λ P are forgetting factors high then the feature is high and indicates
for the order of MOBD is N = 4 [107]. (e.g., λ ≈ 0.98) and AP is the peak ampli- a QRS complex. The location of the maxi-
The threshold Θ is set to the feature maxi- tude. Depending on whether a peak is mum amplitude in the feature is taken as
mum z max after the refractory period and classified as QRS complex or as a noise the location of the R-wave.
then halved whenever a fixed time period peak, either the QRS peak level LP or the The use of recursive and nonrecursive
is elapsed. The threshold is bounded by a noise level LN is updated using Eq. (14) or median filters, i.e.
lower limit that is also adaptive. Eq. (15), respectively. Eventually, the de- y(n ) = median[ y(n − m ), K, y(n −1),
The algorithms described in [41] and tection threshold is determined from
[85] use basically the same preprocessor. x(n ), x(n +1), K, x(n + m )] and (18)
The ECG is bandpass filtered and after- Θ = LN + τ ⋅ ( LP − LN ), (16)
y(n ) = median[ x(n − m ), K, x(n −1),
x(n ), x(n +1), K, x(n + m )], (19)
Feature Signal is proposed, for example, in [123]. The
median operator applied to a vector
x = [ x1 , K, x N ] means sorting the ele-
max ments of the vector according to their val-
2 ues and then taking the midpoint
y = x sorted ( N / 2) as the filter output. In
Running Signal Maximum V [123] a combination of two median filters
and one smoothing filter is used to form a
bandpass filter. The additional signal pro-
cessing steps are similar to [41, 85].
Time Generalized digital filters for ECG
processing with the transfer function
Time Points Where a Peak Is Detected
H ( z) = (1 − z − K )(1 + z −1 ) L K, L > 0
3. Peak detector proposed in [41]. (20)
44 IEEE ENGINEERING IN MEDICINE AND BIOLOGY January/February 2002
are proposed in [12, 100]. Such filters 1 t − b and
have a linear phase response and are ψ2 j , b (t ) = j/2 ⋅ ψ j
2 2 α1 + α 2
computationally highly efficient. They α= .
1 t 2 (26)
were applied, for example, in [101] where = j / 2 ⋅ ψ j − n .
( K , L) = (1, 2) at a sampling rate fT =100 2 2
Hz and in [29] where ( K , L) = (5, 4) at a and
sampling frequency fT = 250 Hz. Other Singularity
j,n ∈ Z. (24) Detection-Based Approaches
reported applications of these filters can
be found in [30, 81]. Although defined as an integral trans- The algorithm proposed by Mallat and
form, the DyWT is usually implemented Hwang [74] was first applied to QRS de-
Digital filters have been widely ap-
using a dyadic filter bank where the filter tection in [66]. R-peaks are found by scan-
plied to QRS detection. However, having
coefficients are directly derived from the ning for simultaneous modulus maxima in
described the major principles, we con-
wavelet function used in the analysis the relevant scales of the WT. For a valid
clude this section here. Further articles on
[14,104]. The input signal to the filter R-peak the estimated Lipschitz regularity
filter-based QRS detection methods in-
bank is the sampled ECG signal. must be greater than zero; i.e., α > 0 [66].
clude [5, 32, 48, 55, 58, 65, 79, 110, 111,
Except for [2] and [39] all wave- Besides the condition on the Lipschitz
112, 102, 121].
let-based peak detection methods men- regularity, the algorithm in [66] applies
Wavelet-Based QRS Detection tioned in this review [6, 24, 54, 66, 93] are further heuristic decision rules such as
based on Mallat’s and Hwang’s approach conditions on the sign and the timing of
Wavelet Transform and the peak occurrence within the different
Singularity Detection for singularity detection and classification
using local maxima of the wavelet coeffi- scales.
The wavelet transform (WT) of a func- The methods in [6] and [50] are di-
tion f (t ) is an integral transform defined cient signals [74]. Therein the correspon-
dence between singularities of a function rectly derived from [66]. Although both
by detection methods are extensively simpli-
f (t ) and local maxima in its wavelet
∞ transform Wf ( a , t ) is investigated. It is fied compared to the original algorithm,
Wf ( a , b) = ∫ f (t)ψ*a , b (t) dt. shown that singularities correspond to the reported results are still very good.
Descriptions of two implementations of
−∞ (21) pairs of modulus maxima across several
scales (see Fig. 12). Figure 5 clarifies the the algorithm from [66] on digital signal
*
where ψ (t ) denotes the complex conju- processors can be found in [57] and [95].
correspondence between a signal with
gate of the wavelet function ψ(t ). The Further QRS detection algorithms
singularities and its wavelet coefficients.
transform yields a time-scale representa- based on local maxima are presented in
Peak classification is accomplished by the
tion similar to the time-frequency repre- [24], [93], and [54]. In [24], characteris-
computation of the singularity degree
sentation of the short-time Fourier tic points are detected by comparing the
(peakiness); i.e., the local Lipschitz regu-
transform (STFT). In contrast to the coefficients of the discrete WT on se-
larity α , which is estimated from the de-
STFT, the WT uses a set of analyzing lected scales against fixed thresholds.
cay of the wavelet coefficients by [74]
functions that allows a variable time and The algorithm described in [93] divides
frequency resolution for different fre- α j = log 2 Wf ( 2 j +1 , n j +1 ) the ECG into segments of a fixed length.
quency bands. The set of analyzing func- R-peaks are detected when the locations
tions, the wavelet family ψa , b , is deduced − log 2 Wf ( 2 j , n j ) (25) of modulus maxima of adjacent scales
from a mother wavelet ψ(t ) by
1 t − b
ψa , b (t ) = ⋅ ψ
2 a (22)
where a and b are the dilation (scale) and 1.0
translation parameter, respectively. The
scale parameter a of the WT is compara-
ble to the frequency parameter of the
STFT. The mother wavelet is a short os-
cillation with zero mean. An example is
depicted in Fig. 4.
0
The discrete wavelet transform
(DWT) results from discretized scale and
translation parameters; e.g., a = 2 j and
b = n ⋅ 2 j where j and n are integer num-
bers. This choice of a and b leads to the
dyadic DWT (DyWT)
∞
–1.0
j
Wf ( 2 , b) = ∫ f (t) ⋅ ψ *
j
2 ,b
(t ) dt 1 2 3 4 5 6 7
−∞ (23)
with 4. Example of a wavelet function (Daubechies-4 wavelet).
January/February 2002 IEEE ENGINEERING IN MEDICINE AND BIOLOGY 45
exceed a threshold that is calculated for Finally, the actual QRS detection is ac- In ECG signal processing, mostly the
every segment. complished by a sophisticated combina- multilayer perceptron (MLP), radial basis
In [39], the wavelet-based zero cross- tion of the features in the following function (RBF) networks, and learning
ing representation from [73] is used for five-stage detection logic. vector quantization (LVQ) networks are
pattern recognition. This pattern recogni- used. As depicted in Fig. 6, the MLP net-
tion method consists of a learning and a Related Methods work consists of several layers of inter-
recognition phase. In the learning phase, a The wavelet transform has also been connected neurons where each neuron
set of generalized feature vectors is gener- used for classification; e.g., in [16, 21, 56, represents a processing function
ated from a set of example patterns, using 96]. In [116] the WT was applied to the
N
the zero crossing representation of the ex- detection of ventricular late potentials
(VLPs) in manually segmented ECG sig- y = f w 0 + ∑ w i x i
ample. In the recognition phase, the fea- i =1
ture vectors are computed for fixed-length nals. The authors of [21] give a brief sur- (30)
segments of the ECG and compared vey of the continuous WT (CWT) of ECG with w i as the weight assigned to input x i
against the generalized feature vectors. If and heart rate variability (HRV) signals and f (⋅) as a linear or nonlinear function.
a percentage match criterion exceeds the and demonstrate the possibility of data In the nonlinear case, f (⋅) is frequently de-
threshold, an R-peak is detected. compression by thresholding of wavelet f in e d a s th e lo g is tic f unc t i on
coefficients. In [16] the application of the f (u) = 1 / (1 + e− u ) or f (u) = tanh (u). RBF
Filter-Bank Methods CWT to ECG signals of healthy subjects networks are an implementation of the
Filter banks are closely related to and patients with cardiac diseases is re- functional
wavelets. Their application to QRS detec- ported and compared to the short-time
tion is reported in [2]. Therein a 32-band Fourier transform. In [56] energy parame- N
x(n ) − c i
fi l t er bank i s us ed t o gener at e ters are derived from the CWT to discrim- y(n ) = ∑ w i exp −
i =1 σi
downsampled subband signals. Similar to inate between normal sine rhythm and (31)
[26], it is assumed that the QRS complex cardiac arrythmias like ventricular fibril- where x(n ) denotes some input data vec-
is characterized by a simultaneous lation, ventricular tachycardia, and atrial tor. The number N of neurons, the coeffi-
occurrence of ECG frequency compo- fibrillation. cients w i , the center vectors c i , and the
nents in the subbands w l , l =1, K, 4. From Wavelet-based filtering and noise re- standard deviations σi are the parameters
these subbands three features, p1 , p2 , and duction methods with applications to of the network. The exponentials may also
p3 , are derived; i.e., ECG signal processing are published in be replaced by other functions; e.g., wave-
3 [49, 60] and [77]. lets. RBF networks are closely related to
p1 (n ) = ∑ w l (n ) fuzzy logic methods [13]. The advantage
l =1 (27) Neural Network Approaches of RBF networks over MLP networks is,
Neural Networks
4 similar to fuzzy-logic methods, the possi-
Artificial neural networks have been
p2 (n ) = ∑ w l (n ) widely applied in nonlinear signal pro-
bility to interpret the parameters. This
l =1 (28) makes the results more predictable and
cessing, classification, and optimization.
hence reliable.
4 In many applications their performance
The LVQ network consists of an input
p3 (n ) = ∑ w l (n ) . was shown to be superior to classical lin-
(29) layer, a competitive layer, and a linear
l= 2 ear approaches.
layer. The competitive layer automati-
cally learns to classify input vectors into
subclasses, where the maximum number
of subclasses N equals the number of
competitive neurons. In this layer, a clas-
f(t) sification is accomplished on the basis of
the Euclidian distance between the input
vector and the weight vector of each of the
competitive neurons. Finally, the linear
layer combines the subclasses of the first
f(t) ∗ θ(t) layer to the user-defined target classes.
The structure of the LVQ network is
shown in Fig. 7.
Wf(aj,t) In order to accomplish the applica-
tion-dependent task (e.g. approximation
or classification), the parameters of the
network need to be trained. Whereas the
MLP and RBF networks are trained by su-
τd τd τd pervised learning algorithms, the LVQ
network is adjusted in an unsupervised
5. Example of the correspondence between singularities of a function f ( t ) and local manner. Appropriate training algorithms
maxima in its wavelet transform Wf ( a , t ). The mother wavelet is the derivative of a are described in the literature; for exam-
smoothing function θ( t ). ple, in [11, 44].
46 IEEE ENGINEERING IN MEDICINE AND BIOLOGY January/February 2002
The application of neural networks in tabase. The classification is carried out with the time-variant coefficients a i (n ),
the field of ECG waveform classification with an overlap of 10-30 samples. As re- i =1KP. They are adaptively adjusted ac-
is reported in [8, 26, 31, 40, 47, 62, 63, 70, ported in [105], the results do not reach cording to the changing signal statistics.
71, 72, 105, 108, 113, 119, 122]. Some of the results of classical approaches, such From the literature several adaption rules
these algorithms [47, 105, 119, 122], are as [85]. However, once trained the LVQ for the coefficients are known; e.g., the
also concerned with the QRS detection network offers fast computations and least mean square (LMS) algorithm
problem. furthermore a discrimination between
a (n +1) = a (n ) + λe(n ) x(n ) (33)
QRS and PVC contractions.
Neural Networks as Adaptive w h e r e a(n ) = [ a1 (n ), a 2 (n ), K, a P (n )]T
Nonlinear Predictors Additional Approaches denotes the coefficient vector at time n, λ
In the context of QRS detection, neural Adaptive Filters is th e s te p s iz e p a r a m e t e r ,
networks have been used as adaptive The application of adaptive prediction e(n ) = x(n ) − x$(n ) denotes the prediction
nonlinear predictors [47, 119, 122]. The filters to QRS detection has been investi- e r r o r, a n d x(n ) = [ x(n −1), x(n − 2),
objective is to predict the current signal gated (e.g., in [61,42]). Figure 8 shows the x(n − 2), K, x(n − P)]T is the vector of the
value x(n ) from its past values x(n − i), structure of an FIR prediction filter. Simi- time-delayed ECG signal samples. For a
i > 0. lar to the nonlinear case (see the previous detailed description of the adaptive filter-
Because the ECG consists almost section) the objective of the filter is to gain ing methods, see [43].
solely of non-QRS segments, the neural an estimate x$(n ) for the current signal The authors of [61] propose features
network converges to a point where sam- sample x(n ) from the past signal values by on the basis of adaptive filtering. They
ples from non-QRS segments are well means of a weighted superposition; that suggest to use the differences between the
predicted. Segments with sudden changes is, coefficient vectors a at time n and time
(i.e., QRS segments) follow a different n −1; i.e,
P
statistics and lead to a sudden increase in x$(n ) = ∑ a i (n ) x(n − i) P
the prediction error. It follows that the i =1 (32) D(n ) = ∑ | a i (n ) − a i (n −1)| 2 ,
prediction error e(n ) can be used as a fea- i =1 (34)
ture signal for QRS detection.
Due to the nonlinear behavior of the
background noise as described in [122], a y(n)
nonlinear prediction filter may show
better performance than its linear counter-
Output Layer
part. In [122, 47, 119] the neural network
is an MLP network with a three-layer
structure. The input layer consists of eight
to ten linear neurons with the time-de-
layed signal samples as inputs; the hidden Hidden Layer
layer has three to five nonlinear (logistic
nonlinearity) neurons and the output layer
contains one, again a linear neuron. In Input
[119] the network is trained prior to the Layer
detection on carefully selected samples. ECG x(n)
In contrast to prior learning in [122] the x(n–1) x(n–2) x(n–3)x(n–4) x(n–5) x(n–6)x(n–7) x(n–8)x(n–9)x(n–10)
network is trained online and hence able
to adopt to changing signal statistics. In 6. Multilayer perceptron.
[122] the output of the nonlinear predic-
tion filter is further processed by a
matched filter, providing a better attenua- y1(n) y2(n)
tion of the residual noise.
Linear Layer
Learning Vector Quantization for
QRS Detection
In [105] the authors propose the appli-
Competitive
cation of a two-layer LVQ network for Layer
QRS detection and the discrimination of
premature ventricular contractions
(PVC). The input and the competitive
layer consist of 20-40 neurons, whereas Input
in the linear layer there are two neurons Layer
corresponding to the number of output ECG x(n)
classes. The input are adjacent samples x(n–1) x(n–2)x(n–3) x(n–4) x(n–5) ... x(n–P)
of the ECG. Training data were taken
from several records of the MIT/BIH da- 7. LVQ network.
January/February 2002 IEEE ENGINEERING IN MEDICINE AND BIOLOGY 47
with the same structuring element will re-
ECG x(n) move all pits (negative peaks).
T T T T
In [114], opening and closing opera-
a1(n) a2(n) a 3(n) a P(n) tions are used for noise suppression as
proposed in [18]; i.e.,
–x(n) ~ [( x o k) • k ] + [( x • k) o k ]
x=
e(n) 2 (39)
where k is a flat structuring element (zero
8. Prediction filter. line). The generation of a feature signal
for the QRS complexes is accomplished
and a combination of the difference be- sary manual segmentation for training by the operation
tween the short time energies of the resid- prior to the analysis of a record, its patient
ual error of two consecutive segments dependence, and the considerable compu- z=~ x − [( ~
x o B) • B] (40)
n+ m n tational complexity even when the where B is now a peaky structuring ele-
De (n ) = ∑ e2 (i) − ∑ e2 (i). computationally efficient Viterby algo- ment as shown in Fig. 9. In [114] B has a
i= n i= n− m (35) rithm [20] is applied. For further details length of 13 samples. A QRS complex is
Further applications of adaptive filters about HMMs, see e.g. [92,118]. eventually found by comparing the fea-
to QRS detection are reported in [68] and ture signal against an adaptive threshold.
[22]. In [68] it was shown that at a sam- Mathematical Morphology
pling frequency of fT = 500 Hz two tap The use of mathematical morphology Matched Filters
filters are sufficient for a good prediction operators for QRS detection was de- Besides the neural-network-based
performance. In [22] the application of a scribed in [114]. Mathematical morphol- matched filtering approach in [122], there
midprediction filter ogy originates from image processing and are linear matched filtering approaches as,
P
was proposed for ECG signal enhance- for example, reported in [94, 27, 69, 25].
x$(n ) = ∑ a ix(n − i) ment in [18]. Therein the successful re-
moval of impulsive noise from the ECG is
In [94], after some analog preprocessing
k=−P (36) steps such as an automatic gain control,
reported. the ECG signal is digitized and further
is proposed. Mathematical morphology is based on processed by a comb filter (low pass) with
the terms erosion and dilation. Let a notch at 50 Hz and a bandpass filter with
Hidden Markov Models
f : F → I and k: K → I denote discrete cut-off frequencies at 15 Hz and 40 Hz.
In [20] the application of hidden
functions, where the sets F and K are This digital filter stage is followed by a
Markov models (HMM) to QRS and ECG
gi ven b y F = {0,1, K, N −1} a n d matched filter for further improvement of
waveform detection is investigated.
K = {0,1, K, M −1}. I is the set of integer the signal-to-noise ratio (SNR). The
HMMs model the observed data sequence
numbers. The erosion of the function f by matched filtering is accomplished by
by a probability function that varies ac-
the function k is defined as [18]
cording to the state of an underlying (hid- N −1
den) Markov chain. By means of the ( f 両 k)(m ) = min
n = 0 ,K, M −1
f (m + n ) − k(n ) y(n ) = ∑ h (i) x(n − i)
Markov chain the global structural char- i= 0 (41)
acteristics of the process are preserved for N > M and m = 0,..., N − M (37)
where the impulse response h (n ) is the
while the parameters of the probability time-reversed template of the waveform
density function account for the varying k is also referred to as the structuring ele-
ment. The values of ( f 両 k) are always to be detected. The impulse response of
statistical properties of the observed data. the matched filter h (n ) is manually taken
The objective of the algorithm is to infer less than those of f .
The dilation of the function f by the from the first cardiac cycles of the current
the underlying state sequence from the measurements; i.e., it needs to be deter-
observed signal. In the case of ECG sig- function k is defined as [18]
mined interactively. For further enhance-
nals, possible states are P-wave, QRS, and ( f ⊕ k)(m ) = max f (n ) + k(m − n ) ment of the timing accuracy, the output of
T-wave. The advantage of this detection n = 0 , K, M − 1
the matched filter is interpolated up to
method is that not only the QRS complex for N > M and m = M −1, K, N −1. four times the original sampling fre-
is determined but also P- and T-waves. (38) quency. The final decision about a QRS
Problems of the method include a neces- The values of f ⊕ k are always greater complex is taken by comparing the fil-
than those of f . tered signal against a fixed threshold. It is
Erosion and dilation are combined for reported in [94] that the matched filter
additional operations. Opening, denoted also improves the timing accuracy of the
by °, is defined as erosion followed by a detected R-wave.
dilation. Closing, denoted by •, is defined A similar approach is proposed in [69].
as dilation followed by an erosion. Both Instead of computing the cross correlation
operators manipulate signals in a compa- between the template and the signal as in
rable way. That is, to open a sequence f Eq. (41), the algorithm searches for the
9. Peaky structuring element for QRS with a flat structuring element k will re- minimum of the average magnitude cross
detection. move all peaks. To close the sequence difference (AMCD)
48 IEEE ENGINEERING IN MEDICINE AND BIOLOGY January/February 2002
Table 1. Sets Used in Syntactic Approaches for ECG Event Detection.
Set (alphabet) Primitives Symbols Reference
(1) Σ = {a,b ,c } square of the first a,b ,c depend on amplitude and duration of [9]
derivative y12 peaks of y12
(2) Σ = {(a,b )| a ∈ {/,\,0 },b ∈ {+,−,*}} line segments a: slope of the line segment, i.e. positive slope [46]
(/), negative slope (\) or zero slope (0). b: start
point of the line segment, i.e. above (+), below
(–) or on the baseline (*)
(3) Σ = {h, s , s n ,i ,i n ,l ,l n } line segments horizontal (h), small (s), negative small (s n ), in- [117]
termediate (i), negative intermediate (i n ), large (l)
and negative large (l n ) slope
(4) Σ = {(l P ,i ,n),(s P ,i ,n),(s N ,i ,n),(l N ,i ,n)} line segments {l P , s P , s N ,l N }: slope of line segment; i ,n: time [87]
coordinate and duration of line segment
(attribute values)
(5) Σ = {K + ,K − ,E ,Π } peak, line and K + (positive peak), K − (negative peak), E (line [113]
parabolic segment segment), Π (parabolic segment), and additional
attribute values describing the primitives.
N
N = 5), and quadratic filters with selected h (n ) = {−0.038, 0,−0143
. , 0,−0.610, 0,
AMCD = ∑ | x(n − i) − h (i)| samples (M = 2 and N = 3).
i =1 0.610, 0, 0143
. , 0, 0.038}. (47)
(42) The decision stage consists mainly of
where x(n ) is the ECG signal and h (i) is an adaptive threshold that is compared Impulse responses for other filter orders
the time-reversed template. This algo- against the filtered ECG signal. The are listed in [82].
rithm does not need multiplications and is threshold adaption parameters are opti- The Hilbert transform x H (n ) of the
therefore computationally inexpensive. In mized in conjunction with the polynomial ECG signal x(n ) is used for the computa-
[69], templates of length N =10 and filter via a genetic optimization algorithm. tion of the signal envelope [82], which is
N = 20 at a sampling frequency of 500 Hz given for bandlimited signals by
are used. The ECG signal as well as the Hilbert Transform-Based
QRS Detection x e (n ) = x 2 (n ) + x H2 (n ) . (48)
template need to be detrended before the
calculation of the AMCD. In [124, 82] the use of the Hilbert trans-
form for QRS detection is proposed. The A computationally less expensive ap-
Further applications of matched filters proximation to the envelope can be made
are reported in [25] and [27], where inte- Hilbert transform of a real signal x is de-
fined by by [82]
grated circuits are used for the real-time
computation of the correlation coefficient ∞ x e (n ) ≈| x(n )|+| x H (n )|. (49)
1 x(τ )
and a wave digital filter realization is x H (t ) = H{x} = ∫ t − τ dτ
π −∞ In order to remove ripples from the en-
shown, respectively. velope and to avoid ambiguities in the
1 peak level detection, in [82] the envelope
= x H (t ) = x(t ) *
Genetic Algorithms πt (44) is low-pass filtered. Additionally, in [82]
In [91], genetic algorithms have been a waveform adaptive scheme for the re-
and may be computed in the frequency do-
applied to a combined design of optimal moval of low frequency ECG components
main as
polynomial filters for the preprocessing of is proposed.
the ECG and the parameters of a decision X H ( jω) = X ( jω) ⋅ [− j ⋅ sgn(ω)] The method published in [124] is re-
stage. = X ( jω ) ⋅ H ( jω ) lated to the algorithms based on the
(45)
Polynomial filters are defined by [91] Hilbert transform. In [124] the envelope
where the transfer function of the Hilbert of the signal is approximated by
M M M
transform H ( jω) is given by
yn = ∑ ∑ ⋅⋅⋅ ∑ x e (n ) ≈| x1 (n )|+| x 2 (n )| (50)
k1 = 0 k2 = 0
144244 kN = 0
3 − j 0 ≤ω <π
where x1 (n ) and x 2 (n ) are the outputs of
H ( jω ) =
∑ k j ≤M j −π ≤ ω < 0. (46) two orthogonal digital filters; i.e.,
k k k
a k1 k2 ⋅⋅⋅kN x n1− d 1 x n2− d 2 ⋅⋅⋅ x nN− d N Using the fast Fourier transform x1 (n ) = x(n ) − x(n − 6) and (51)
(43)
(FFT), the Hilbert transform can easily be
where the d j are delays with respect to the computed. In [82] the ideal Hilbert x 2 (n ) = x(n ) − x(n − 2)
time n. Three different special cases of a transformator is approximated by a − x(n − 6) − x(n − 8). (52)
polynomial filter are investigated: bandlimited ( 2 N +1)-tap FIR filter with
quasi-linear filters with consecutive sam- the impulse response h (n ). For example, In order to remove noise, the envelope
ples (M =1 and N =10), quasi-linear fil- the impulse response for the filter of the signal x e (n ) is smoothed by a four-tap
ters with selected samples (M =1 and order N =11 is given by [82] moving average filter.
January/February 2002 IEEE ENGINEERING IN MEDICINE AND BIOLOGY 49
Length and Energy Transforms i + q −1 n
from the square root of the second sum in
In [36, 37] the application of length E(n , q , i) = ∑ ∑ ( ∆x j , k ) 2 Eq. (53). The length transform represents
k = i j =1
and energy transforms to QRS detection a temporarily smoothed time course of the
is investigated. The transforms are de- energy transform (54) vector length. A similar assumption leads
fined for multichannel ECG signals but to the energy transform, which can be in-
where n is the number of ECG channels, i
may also be used for single-channel ECG terpreted as the short-term energy estima-
is the time index, q denotes the window
analysis. They are given by tion of the vector. The authors of [36, 37]
length, and ∆x j , k = x j , k − x j , k −1 . These
i + q −1 n formulas are based on the assumption that state that both transforms are superior to
L(n , q , i) = ∑ ∑ ( ∆x j , k ) 2 the derivatives of the ECG channels can conventional transforms for feature ex-
k=i j =1
be considered as the elements of a vector. traction, whereas the length transform
length transform The length of the vector is determined works particularly good in cases of small
(53)
QRS complexes.
Syntactic Methods
Syntactic algorithms for ECG process-
a) ing have been proposed in [9, 19, 86, 97,
113]. A review of several algorithms is
given in [98]. The signal to be analyzed by
b) a syntactic method is assumed to be a con-
catenation of linguistically represented
c) primitive patterns; i.e., strings. Using a
grammar, this string representation is
parsed for strings coding a search pattern.
d)
Therefore, a syntatic algorithm for pattern
recognition essentially requires the defi-
e) nition of primitive patterns, a suitable lin-
guistic representation (alphabet) of the
f)
primitive patterns, and the formulation of
a pattern grammar.
In ECG processing the signal is split
g) into short segments of a variable or a fixed
length. Each segment is then represented
by a primitive and coded using the
Time predefined alphabet. Due to their compu-
tational efficiency, most algorithms use
line segments as primitives for the signal
representation [9, 46, 87, 117]. In [113]
the set of line primitives is extended by
a) peaks, parabolic curves, and additional at-
tributes. An overview of several primitive
patterns, alphabets, and attributes is given
b) in Table 1.
Various grammars for these alphabets
c) (i.e., rules describing the set of search pat-
terns) are proposed in [35, 46, 88, 87, 113,
115, 117].
d)
QRS Detection Based
e) on MAP Estimation
Maximum a posteriori (MAP) estima-
tion can be considered as a special case
f)
within the Bayesian framework, which
provides a very general basis for parame-
g) ter estimation including the incorporation
of prior knowledge. The MAP estimate
θ$ MAP of a parameter θ given the observa-
Time tion x is defined by
θ$ MAP = argmax fθ (θ| x)
10. (a) ECG signal (top: from record 100; bottom: from record 108), (b) first deriva- θ (55)
tive from Eq. (1), (c) first derivative from Eq. (4), (d) feature from Eq. (8), (e) fea-
ture from Eq. (9), (f) feature from [83], (g) MOBD feature signal. where
50 IEEE ENGINEERING IN MEDICINE AND BIOLOGY January/February 2002
fx ( x| θ) fθ (θ) The feature signal z(n ) is compared well-annotated and validated databases
fθ (θ| x) = against an adaptive threshold for the de- provide reproducible and comparable re-
fx ( x) (56)
tection of QRS complexes. The temporal sults. Furthermore, these databases con-
is the a posteriori probability density location of the R-wave is found by a maxi- tain a large number of selected signals
function (pdf) of θ given x. The a priori mum search in the bandpass-filtered sig- representative for the large variety of
pdf fθ (θ) of the parameter θ represents the nal around a detected QRS candidate. ECGs as well as signals that are rarely ob-
available prior knowledge. served but clinically important.
In [12] a QRS detection method based Benchmark Databases Available standard databases include:
on MAP estimation is presented. The pro- Several standard ECG databases are 1) MIT-BIH Database
posed model for the N -dimensional vec- available for the evaluation of software The MIT-BIH database [76] provided
tor x of ECG samples is given by QRS detection algorithms. Tests on these by MIT and Boston’s Beth Israel Hospital
x(n ) =
q
∑ B s(n − θi, Ti) + w(n ) : 1 ≤ q ≤ k
i =1 i
w (n ) : q = 0. a)
(57)
where q is the number of pulse-shaped b)
peaks s(n , T ) in the ECG segment and x and
k denote the number of all peaks in the same c)
segment. Bi , Ti , andθ i ,i =1K k give the am-
plitude, duration, and arrival time for thei-th
d)
peak, respectively. w (n ) is additive white
Gaussian noise. For a given joint a priori pdf
fq , B , T , θ ( q , B, T, θ), the MAP estimate of e)
the model parameters is given by
( q$ , B$ , T$ , θ$) = argmax V ( x, q , B, T, θ) f)
q ,B ,T ,θ (58)
g)
with V ( x, q , B, T, θ) being the log-likeli-
hood function wi t h r es pect t o
fq , B , T , θ ( q , B, T, θ). Detailed consider-
ations of the prior knowledge leading to a Time
joint a priori pdf fq , B , T , θ ( q , B, T, θ) are
described in [12].
Since the maximization process is
computationally expensive, the authors
also present modifications for an approxi-
a)
mate MAP estimation. Further simplifica-
tions are presented in [100].
b)
Zero-Crossing-Based
QRS Detection c)
QRS detection based on zero crossing
counts is proposed in [59]. After bandpass
filtering, a high-frequency sequence d)
b(n ) = k(n ) ⋅ (−1) n is added to the filtered
signal y1 (n ); i.e., e)
y 2 (n ) = y1 (n ) + b(n ). (59)
f)
The amplitude of the high-frequency
sequence k(n ) is determined from a run-
ning average of the modulus of the g)
bandpass-filtered ECG | y1 (n )|. Since the
amplitude of k(n ) is lower than the ampli-
tude of the QRS complex, the number of Time
zero crossings is large during non-QRS
segments and low during the QRS com- 11. (a) ECG signal (top: from record 100; bottom: from record 108), (b) Feature by
plex. Computing a running average of the [41], (c) feature by [26], (d) LMS prediction error e ( n) (filter order 2, step size
number of zero crossings results in a ro- λ = 0. 03), (e) LMS feature from Eq. (34) (filter order 2, step size λ = 0. 03), (f) LMS
bust feature z(n ) for the QRS complexes. feature from Eq. (35) (filter order 2, step size λ = 0. 03), (g) matched filter feature.
January/February 2002 IEEE ENGINEERING IN MEDICINE AND BIOLOGY 51
consists of ten databases for various test Sinus Rhythm Database. In addition to the Twenty-five recordings (records number
purposes; i.e., the Arrhythmia Database, AHA (see below) database and the Euro- 200 and above) with less common
the Noise Stress Test Database, the Ven- pean ST-T Database (see below), the first arrhythmias were selected from over 4000
tricular Tachyarrhythmia Database from three MIT-BIH databases are required by 24-hour ambulatory ECG recordings, and
Creighton University Cardiac Center, the the ANSI for testing ambulatory ECG de- the rest was chosen randomly. Altogether
ST Change Database, the Malignant Ven- vices. there are 116137 QRS complexes in this
tricular Arrhythmia Database, the Atrial Most frequently the MIT-BIH Ar- database. While some records contain
Fibrillation/Flutter Database, the ECG rhythmia Database is used. It contains 48 clear R-peaks and few artifacts (e.g., re-
Compression T es t Dat abas e, t he half-hour recordings of annotated ECG cords 100-107), for some records the de-
Supraventricular Arrhythmia Database, with a sampling rate of 360 Hz and 11-bit tection of QRS complexes is very difficult
the Long-Term Database, and the Normal r es ol u tio n o v e r a 1 0 -m V r a n g e . due to abnormal shapes, noise, and arti-
facts (e.g., records 108 and 207).
2) AHA Database
The AHA Database for Evaluation of
Ventricular Arrhythmia Detectors [4] of
the American Heart Association contains
a) 155 recordings of ambulatory ECG. The
signals have been digitized with a sam-
pling rate of 250 Hz and a resolution of 12
b) bits over 20 mV. Each record consists of
2.5 hours of unannotated signal followed
by 30 minutes of annotated ECG. The re-
c)
cords are arranged into eight groups rep-
resenting different levels of ectopic
d) excitation. Records 1001 to 1020 of the
first group show no extra systoles,
whereas records 8001 to 8010 containing
e) ECGs with ventricular fibrillation show
the highest level of ventricular ectopy.
3) Ann Arbor Electrogram Libraries
f) The Ann Arbor Electrogram Libraries
[52] are a collection of more than 800
intracardiac electrograms and surface
Time ECGs. Each recording consists of
intracardiac unipolar and bipolar
electrocardiograms and a surface ECG.
This database is especially valuable for
th e e v a lu a tio n o f a lg o r i t hm s f or
implantable cardiac devices.
a) 4) CSE Database
The Common Standards for Electro-
cardiography (CSE) Database [10] is fre-
b) quently used for the evaluation of
diagnostic ECG analyzers. The CSE Da-
c) tabase consists of about 1000 multilead
recordings (12 or 15 leads).
5) Other Standard Databases
d) More libraries available for evaluation
of detection and classification algorithms
e) are the European ST-T Database [80], the
QT Database [64], the MGH Database
[75], the IMPROVE Data Library [120],
f) and the ECG Reference Data Set [89] of
the Physikalisch-Technische Bunde-
sanstalt (PTB). The ST-T Database con-
tains 90 recordings of two hours of ECG
Time each, selected for the evaluation of ECG
devices that analyze ST levels and
12. (a) ECG signal (top: from record 100; bottom: from record 108); wavelet T-waves. The QT Database was designed
subband signals for the scales j = 1 (b) to j = 5 (f). For the wavelet transform the for evaluation of algorithms that detect
spline wavelet proposed in [74] was used. waveform boundaries in the ECG. For this
52 IEEE ENGINEERING IN MEDICINE AND BIOLOGY January/February 2002
database, 105 records with a broad variety
of QRS and ST-T morphologies were se-
lected from other databases; e.g., the
MIT-BIH Arrhythmia Database and the
a)
European ST-T Database. Each record
has a length of 15 minutes. The databases b)
of the Massachusetts General Hospital
and the IMPROVE database are multi- c)
channel record i ngs cont ai ni ng a
d)
three-lead ECG and additional signals
such as systemic and pulmonary aterial
pressure (SAP, PAP), central venous Time
pressure (CVP), CO 2 , O 2 , and respiration.
The ECG Reference Data Set of the PTB
is not finished yet. Currently, this data-
base contains more than 500 records with
durations from 38 s to 120 s. The classifi- a)
cation follows the classification scheme b)
of the AHA.
c)
Evaluation and Comparison d)
The usage of software QRS detection
algorithms in medical devices requires the
evaluation of the detection performance. Time
According to [1], essentially two parame-
ters should be used to evaluate the algo-
rithms; that is, 13. Features of the filterbank approach [2], M = 32; (a) ECG signal (top: from re-
TP cord 100; bottom: from record 108), (b) feature signal p1 , (c) feature signal p2 , (d)
Se = sensitivity feature signal p3 .
TP + FN (60)
TP Publications without reported or with pathological signals but not on the normal
+P = positive predictivity incompatible results are not comparable ECG. A further simplification is made by
TP + FP and are not considered further. Results stating only the overall performance. That
(61) from the same reliability level are re- is, no statement is given on the worst case
garded as comparable. Within each reli- performance, which is also important. A
where TP denotes the number of true posi-
ability level the algorithms are grouped third simplification is the disregard of the
tive detections, FN the number of false
according to the reported performance. fact that the results may have been
negatives, and FP the number of false
The results of this comparison are achieved by an extreme fine tuning of the
positives. Furthermore, to achieve com-
shown in Table 1. It provides a quick parameters. In such cases the good re-
parable and reproducible results, the eval-
overview of the achieved detection results ported results might be difficult to repro-
uation needs to be carried out on standard
and gives a good impression on what algo- d u c e . F in a lly , th is c o mpa r i son
databases.
rithms are potentially useful for an inte- discriminates against older algorithms,
Contrary to the requirements of com-
gration in larger ECG analysis systems. because in the early years of software
parability and reproducibility, in practice
However, it should be clear that some QRS detection there were no standard
there are many publications where no
simplifications have been made that need databases available.
evaluation is reported at all, the evaluation
has not been done using standard data- to be discussed. First of all, although some The algorithmic comparison with re-
bases, or the performance indices are not results are classified as less reliable or un- spect to the computational load can be car-
compatible to the sensitivity and positive reliable, nothing is said about the perfor- ried out by grouping the algorithms into
predictivity parameters. This effectively mance of the algorithm. Despite this the categories low, medium, and high
leads to incomparable results. reliability level, the actual algorithm may computational complexity. The compari-
In order to make a comparison possi- perform very well. In particular, in the son is shown in Table 2. Only the algo-
ble, we rank the reported results with re- case where only parts of a standard data- rithms from Table 1 are considered. Again
spect to how they were obtained; i.e., base have been used, the intention of the the grouping of the algorithms into these
n reliable results: the algorithm is
original authors frequently was to show simple categories provides a quick over-
tested against a standard database, the performance of the algorithm on par- view, which is gained at the expense of
n less reliable results; the algorithm is
ticularly difficult records, such as records lost information. In particular, for the
tested against parts of a standard with pathological or very noisy signals. comparison only the generation of the fea-
database, and However, from an objective point of ture signals is considered. However, this
n unreliable results: the algorithm is view, the reported results are not truly re- limitation is reasonable since the feature
tested agains t a nons t andar d liable, because the algorithm may have generation is carried out for each sample
database. been tuned to perform perfectly on such of the ECG whereas the decision stage is
January/February 2002 IEEE ENGINEERING IN MEDICINE AND BIOLOGY 53
usually activated only a few times during As can be seen from the figures, more extensively transferred to the problem of
a cardiac cycle. Furthermore, since the ex- sophisticated algorithms tend to cope QRS detection so that there are still many
act computational needs of these algo- better with these problems. Shortcomings tools left for further improvements.
rithms are not available, the algorithms of these features may be partly compen- Many of the presented algorithms
are classified according to our experience. sated for by suitable decision rules. were not tested against a standard data-
This simplification is of course subjective base or any database at all. This makes the
and not generally valid. However, in par- Conclusions results difficult to compare and to evalu-
ticular for researchers who are not famil- The great variety of QRS detection al- ate. With respect to the problems left in
iar with QRS detection, this classification gorithms presented in this review reflects QRS detection, in particular the algorith-
may give a general idea about the neces- the need for a reliable QRS detection in mic behavior in case of noisy and patho-
sary processing power. cardiac signal processing. Sensitivities logical signals, only a comparable and
In order to give an impression about and specificities of about 99.5% are possi- reproducible evaluation on a standard
the difficulties in ECG analysis and QRS ble for online QRS detectors today with- database may show the progress achieved
detection, some features of the presented out much computational effort. These by a novel method.
algorithms are computed for two very dif- detection rates may be sufficient for clini-
ferent ECG segments. They are shown in cal applications, whereas a higher perfor- Bert-Uwe Köhler re-
Fig. 10 to Fig. 13. The signals are taken mance may be necessary for research ceived the Dipl.-Ing.
from records 100 and 108 of the MIT/BIH purposes. In that case, offline ECG analy- degree and the Dr.-Ing.
arrhythmia database. Whereas R-peaks in sis, where, for example, backsearch meth- (Ph.D.) degree in elec-
record 100 are very clear and easy to de- ods can be applied, may provide higher trical engineering from
termine, the detection of QRS complexes performance. the Berlin University of
is very difficult in record 108. Generally, The currently achievable detection Technology in 1995 and
detection problems may occur in case of rates reflect only the overall performance 1999, respectively.
n noisy signals, electrode artifacts, of the detectors. These numbers hide the From 1995 until 2001
baseline drift, power line interfer- problems that are still present in case of he worked as a researcher at the Depart-
ence; noisy or pathological signals. A satisfying ment of Electrical Engineering of the
n pathological signals; Berlin University of Technology and gave
solution to these problems is still not
n small QRS complexes; and courses in signal processing and medical
found. However, recent advances in clas-
n sudden level changes of the QRS electronics. In 2001, he joined the re-
sification techniques such as novel
complex. softcomputing techniques have not been search and development department of
Table 2. Comparison of the Results of Different Algorithms.
min[S ,+P ] Standard Data Base Parts of Standard Data Base Nonstandard Data Base
> 99% Afonso et al. [2], Gritzali [36], Belforte et al. [9],
Bahoura et al. [6], Hu et al. [47], Dobbs et al. [25],
Hamilton & Tompkins [41], Kohama et al. [58], Fischer et al. [32],
Inoue & Miyazaki [50], Ruha et al. [94], Thakor & Webster [109],
Kohler et al. [59], Sahambi et al. [95], Yu et al. [123]
Li et al. [66], Vijaya et al. [119],
Poli et al. [91] Xue et al. [122]
95% - 99% Suppappola & Sun [106][107] Coast et al. [20], Sörnmo et al. [100],
Kadambe et al. [53][54] Udupa & Murthy [117]
90% - 95% Papakonstantinou et al. [87],
Trahanias [114]
< 90% Ligtenberg & Kunt [67]
Table 3. Subjective Comparison with Respect to the Computational Load.
Low Medium High
Afonso et al. [2], Bahoura et al. [6], Belforte et al. [9],
Fischer et al. [32], Dobbs et al. [25], Coast et al. [20],
Köhler et al. [59], Gritzali [36], Hu et al. [47],
Kohama et al. [58], Hamilton & Tompkins [41], Inoue & Miyazaki [50],
Suppappola & Sun [106][107], Kadambe et al. [53][54], Li et al. [66],
Trahanias [114], Ligtenberg & Kunt [67], Papakonstantinou et al. [87],
Yu et al. [123] Poli et al. [91], Sahambi et al. [95],
Ruha et al. [94], Sörnmo et al. [100],
Vijaya et al. [119] Udupa & Murthy [117],
Xue et al. [122]
54 IEEE ENGINEERING IN MEDICINE AND BIOLOGY January/February 2002
Siemens Berlin. His research interests fo- [2] V.X. Afonso, W.J. Tompkins, T.Q. Nguyen, [18] C.-H.H. Chu and E.J. Delp, “Impulsive noise
cus on statistical biomedical signal pro- and S. Luo, “ECG beat detection using filter suppression and background normalization of
cessing, in particular blind source banks,” IEEE Trans. Biomed. Eng., vol. 46, pp. electrocardiogram signals using morphological
separation and independent component 192-202, 1999. operators,” IEEE Trans. Biomed. Eng., vol. 36,
pp. 262-273, 1989.
analysis. [3] M.L. Ahlstrom and W.J. Tompkins, “Auto-
mated high-speed analysis of holter tapes with mi- [19] E.J. Ciaccio, S.M. Dunn, and M. Akay,
crocomputers,” IEEE Trans. Biomed. Eng., vol. “Biosignal pattern recognition and interpretation
Carsten Hennig re- systems,” IEEE Eng. Med. Biol. Mag., pp.
30, pp. 651-657, Oct. 1983.
ceived the Dipl.-Ing. 269-273, 1994.
degree in electrical en- [4] American Heart Association, AHA Database,
ECRI, 5200 Butler Pike, Plymouth Meeting, PA [20] D.A. Coast, R.M. Stern, G.G. Cano, and S.A.
gineering from the
19462 USA. Briller, “An approach to cardiac arrhythmia anal-
Berlin University of ysis using hidden Markov models,” IEEE Trans.
Technology in 1999. [5] H. Baharestani, W.J. Tompkins, J.G. Webster, Biomed. Eng., vol. 37, pp. 826-836, 1990.
From 1999 to 2001 he and R.B. Mazess, “Heart rate recorder,” Med.
[21] J.A. Crowe, N.M. Gibson, M.S. Woolfson,
was working as a re- Biol. Eng. Comput., vol. 17, no. 6, pp. 719-723,
Nov. 1979. and M.G. Somekh, “Wavelet transform as a po-
search assistant at the tential tool for ECG analysis and compression,” J.
Berlin University of Technology. His re- [6] M. Bahoura, M. Hassani, and M. Hubin, “DSP Biomed. Eng., vol. 14, no. 3, pp. 268-272, 1992.
search focuses on wavelet transform implementation of wavelet transform for real time
[22] S. Dandapat and G.C. Ray, “Spike detection
methods in digital signal processing and ECG wave forms detection and heart rate analy-
in biomedical signals using midprediction filter,”
biomedical signal processing. sis,” Comput. Methods Programs Biomed., vol.
Med. Biol. Eng. Comput., vol. 35, no. 4, pp.
52, no. 1, pp. 35-44, 1997.
354-360, 1997.
Reinhold Orglmeister [7] R.A. Balda, Trends in Computer-Processed
[23] I.K. Daskalov and I.I. Christov, “Electrocar-
received the Dipl.-Ing. Electrocardiograms. Amsterdam: North Hol-
diogram signal preprocessing for automatic de-
degree and the Dr.-Ing. land, 1977, pp. 197-205.
tection of QRS boundaries,” Med. Eng. Phys., vol.
(Ph.D.) degree in elec- [8] S. Barro, M. Fernandez-Delgado, J.A. 21, no. 1, pp. 37-44, 1999.
trical engineering from Vila-Sobrino, C.V. Regueiro, and E. Sanchez, [24] V. Di-Virgilio, C. Francaiancia, S. Lino, and
the Berlin University of “Classifiying multichannel ECG patterns with an S. Cerutti, “ECG fiducial points detection through
Technology in 1980 and adaptive neural network,” IEEE Eng. Med. Biol. wavelet transform,” in 1995 IEEE Eng. Med. Biol.
1985, respectively. Mag., vol. 17, pp. 45-55, Jan./Feb. 1998. 17th Ann. Conf. 21st Canadian Med. Biol. Eng.
From 1980 to 1985 he [9] G. Belforte, R. De Mori, and F. Ferraris, “A Conf., Montreal, Quebec, Canada, 1997, pp.
worked on field theory at the Institute of contribution to the automatic processing of elec- 1051-1052.
Theoretical Electrical Engineering of the trocardiograms using syntactic methods,” IEEE [25] S. Dobbs, N. Schmitt, and H. Ozemek, “QRS
Berlin University of Technology. He was Trans. Biomed. Eng., vol. 26, pp. 125-136, Mar. detection by template matching using real-time
employed from 1985 until 1990 at the 1979. correlation on a microcomputer,” J. Clin. Eng.,
Berlin Research Institute of Robert Bosch [10] J.H. van Bemmel and J.L. Williams, “Stand- vol. 9, no. 3, pp. 197-212, Sept. 1984.
GmbH, where he was responsible for digi- ardisation and validation of medical decision sup- [26] Z. Dokur, T. Olmez, E. Yazgan, and O.K.
tal signal processing. Since 1991 he has port systems: The CSE project,” Methods Inform. Ersoy, “Detection of ECG waveforms by neural
been a professor at the Department of Med., vol. 29, pp. 261-262, 1990. networks,” Med. Eng. Phys., vol. 19, no. 8, pp.
Electrical Engineering at the Berlin Uni- [11] C.M. Bishop and G. Hinton, Neural Net- 738-741, 1997.
versity of Technology and since 2001 works for Pattern Recognition. New York: Clar- [27] D. Ebenezer and V. Krishnamurthy, “Wave
head of the Institute of Power Engi- endon Press, 1995. digital matched filter for electrocardiogram pre-
neering and Automation. He teaches processing,” J. Biomed. Eng., vol. 15, no. 2, pp.
[12] P.O. Börjesson, O. Pahlm, L. Sörnmo, and
courses in signal processing, electronics, M.-E. Nygards, “Adaptive QRS detection based
132-134, 1993.
and medical electronics. His research in- on maximum a posteriori estimation,” IEEE [28] D. Ebenezer and F.F. Papa, “A recursive digi-
terests include medical signal processing Trans. Biomed. Eng., vol. 29, pp. 341-351, May tal differentiator for ECG preprocessing,” Med.
and microprocessor and DSP-based medi- 1982. Eng. Phys., vol. 16, no. 4, pp. 273-277, 1994.
cal instrumentation. [29] W.A.H. Engelse and C. Zeelenberg, “A sin-
[13] H.-H. Bothe, Neuro-Fuzzy-Methoden.
Berlin, Germany: Springer-Verlag, 1997. gle scan algorithm for qrs-detection and feature
extraction,” in IEEE Computers in Cardiology.
Address for Correspondence: Reinhold [14] C.S. Burrus, R.A. Gopinath, and H. Guo, In- Long Beach, CA: IEEE Computer Society, 1979,
Orglmeister, Berlin University of Tech- troduction to Wavelets and Wavelet Transforms. pp. 37-42.
Upper Saddle River, NJ: Prentice Hall, 1998.
nology, Department of Electrical Engi- [30] T. Fancott and D.H. Wong, “A minicomputer
neering, Biomedical Electronics Group, [15] G.G. Cano, S.A. Briller, and D.A. Coast, system for direct high-speed analysis of cardiac
Einsteinufer 17/EN3, D-10587 Berlin, “Enhancement of low-level ECG components in arrhythmia in 24 h ambulatory ECG tape record-
noise with time-sequenced adaptive filtering,” J. ings,” IEEE Trans. Biomed. Eng., vol. 27, pp.
Germany. E-mail: orglmeister@tubife1.
Electrocardiology, vol. 23 (Suppl.), pp. 176-183, 685-693, Dec. 1980.
ee.tu-berlin.de. 1990.
[31] M. Fernandez-Delgado and S.B. Ameneiro,
[16] B. Cellar, Y.C.C. Grace, and C. Phillips, “MART: A multichannel ART-based neural net-
References “ECG analysis and processing using wavelets and work,” IEEE Trans. Neural Networks, vol. 9, pp.
other methods,” Biomed. Eng. Appl. Basis 139-150, 1998.
[1] ANSI/AAMI EC57: Testing and reporting per-
Commun., vol. 9, no. 2, pp. 81-90, 1997.
formance results of cardiac rhythm and ST seg- [32] S.E. Fischer, S.A. Wickline, and C.H.
men t m ea s u r em en t a l g o ri t h m s ( A A M I [17] I.I. Christov, I.A. Dotsinski, and I.K. Lorenz, “Novel real-time R-wave detection algo-
Recommended Practice/American National Stan- Dasalkov, “High-pass filtering of ECG signals us- rithm based on the vectorcardiogram for accurate
dard), 1998. Available: http://www.aami.org; Or- ing QRS elemination,” Med. Biol. Eng. Comput., gated magnetic resonance acquisitions,” Magn.
der Code: EC57-293. vol. 30, pp. 253-256, 1992. Reson. Med., vol. 42, no. 2, pp. 361-70, 1999.
January/February 2002 IEEE ENGINEERING IN MEDICINE AND BIOLOGY 55
[33] J. Fraden and M.R. Neumann, “QRS wave [49] H. Inoue and A. Miyazaki, “A noise reduc- Hermite model,” Med. Biol. Eng. Comput., vol.
detection,” Med. Biol. Eng. Comput., vol. 18, pp. tion method for ECG signals using the dyadic 34, no. 1, pp. 58-68, 1996.
125-132, 1980. wavelet transform,” in 1997 Int. Tech. Conf. Cir-
[64] P. Laguna, R.G. Mark, A. Goldberger, and
cuits/Systems, Computers and Communications
[34] G.M. Friesen, T.C. Jannett, M.A. Jadallah, G.B. Moody, “A database for evaluation of algo-
(ITC-CSCC’97), Okinawa, Japan, 14-16 July
S.L. Yates, S.R. Quint, and H.T. Nagle, “A com- rithms for measurement of QT and other wave-
1997, IEICE Trans. Fundamentals of Electron.,
parison of the noise sensitivity of nine QRS detec- form intervals in the ECG,” Comput. Cardiology,
Commun. Comput. Sci., E81-A, no. 6, pp.
tion algorithms,” IEEE Trans. Biomed. Eng., vol. vol. 24, pp. 673-676, 1997.
1001-1007, 1998.
37, pp. 85-98, 1990.
[50] H. Inoue, S. Iwasaki, M. Shimazu, and T. [65] J. Leski and E. Tkacz, “A new parallel con-
[35] K.S. Fu, “A step towards unification of syn- Katsura, “Detection of QRS complex in ECG us- cept for QRS complex detector,” in Proc. 14th
tactic and statistical pattern recognition,” IEEE ing wavelet transform” (in Japanese), IEICE Gen. Annu. Int. Conf. IEEE Engineering in Medicine
Trans. Pattern Anal. Machine Intell., PAMI-5, Conf., vol. 67, no. A-4, p. 198, Mar. 1997. and Biology Society, Part 2, Paris, France, 1992,
pp. 200-205, Mar. 1983. pp. 555-556.
[51] S. Jalaleddine and C. Hutchens, “Ambula-
[36] F. Gritzali, “Towards a generalized scheme tory ECG wave detection for automated analysis: [66] C. Li, C. Zheng, and C. Tai, “Detection of
for QRS detection in ECG waveforms,” Signal A review,” ISA Trans., vol. 26, no. 4, pp. 33-43, ECG characteristic points using wavelet trans-
Processing, vol. 15, pp. 183-192, 1988. 1987. forms,” IEEE Trans. Biomed. Eng., vol. 42, pp.
21-28, 1995.
[ 3 7 ] F . G ri t zal i , G . Fr a n g a k i s , a n d G . [52] J. Jenkins, Ann Arbor Electrogram Libraries,
Papakonstantinou, “A comparison of the length Available: http://electrogram.com/. [67] A. Ligtenberg and M. Kunt, “A robust-digital
and energy transformations for the QRS detec- QRS-detection algorithm for arrhythmia monitor-
tion,” in Proc. 9th Annu. Conf. IEEE Engineering [53] S. Kadambe, R. Murray, and G.F. ing,” Comput. Biomed. Res., vol. 16, pp. 273-286,
in Medicine and Biology Society, Boston, MA, Boudreaux-Bartels, “The dyadic wavelet trans- 1983.
1987, pp. 549-550. form based QRS detector,” in 1992 Conf. Rec.
26th Asilomar Conf. Signals, Systems and Com- [68] K.P. Lin and W.H. Chang, “QRS feature ex-
[38] D. Gustafson, “Automated VCG interpreta- puters, vol. 1, pp. 130 -134. traction using linear prediction,” IEEE Trans.
tion studies using signal analysis techniques,” Biomed. Eng., vol. 36, pp. 1050-1055, 1989.
[54] S. Kadambe, R. Murray, and G.F.
R-1044 Charles Stark Draper Lab., Cambridge,
Boudreaux-Bartels, “Wavelet transform-based [69] K.G. Lindecrantz and H. Lilja, “New soft-
MA, 1977.
QRS complex detector,” IEEE Trans. Biomed. ware QRS detector algorithm suitable for real
[39] T.A. Gyaw and S.R. Ray, “The wavelet trans- Eng., vol. 46, pp. 838-848, 1999. time application with low signal-to-noise ratios,”
form as a tool for recognition of biosignals,” [55] L. Keselbrener, M. Keselbrener, and S. J. Biomed. Eng., vol. 10, no. 3, pp. 280-284, 1988.
Biomed. Sci. Instrum., vol. 30, pp. 63-68, 1994. Akselrod, “Nonlinear high pass filter for R-wave [70] N. Maglaveras, T. Stamkopoulos, K.
[40] F.M. Ham and S. Han, “Classification of car- detection in ECG signal,” Med. Eng. Phys., vol. Diamantaras, C. Pappas, and M. Strintzis, “ECG
diac arrhythmias using fuzzy ARTMAP,” IEEE 19, no. 5, pp. 481-484, 1997. pattern recognition and classification using
Trans. Biomed. Eng., vol. 43, pp. 425-430, Apr. [56] L. Khadra, A.S. Al-Fahoum, and H. non-linear transformations and neural networks:
1996. Al-Nashash, “Detection of life-threatening car- A review,” Int. J. Med. Informatics, vol. 52, nos.
diac arrhythmias using the wavelet transforma- 1-3, pp. 191-208, 1998.
[41] P.S. Hamilton and W.J. Tompkins, “Quanti-
tative investigation of QRS detection rules using tion,” Med. Biol. Eng. Comput., vol. 35, no. 6, pp. [71] N. Maglaveras, T. Stamkopoulos, C. Pappas,
the MIT/BIH arrhythmiac database,” IEEE Trans. 626-632, 1997. and M. Strintzis, “ECG processing techniques
Biomed. Eng., vol. 33, pp. 1157-1165, 1986. [57] K.S. Khobragade and R.B. Deshmukh, based on neural networks and bidirectional asso-
“ECG analysis using wavelet transforms,” IETE ciative memories,” J. Med. Eng. Technol., vol. 22,
[42] P.S. Hamilton and W.J. Tompkins, “Adap-
J. Res., vol. 43, no. 6, pp. 423-432, 1997. no. 3, pp. 106-111, 1998.
tive matched filtering for QRS detection,” in
Proc. Annu. Int. Conf. IEEE Engineering in Medi- [58] T. Kohama, S. Nakamura, and H. Hoshino, [72] N. Mahalingam and D. Kumar, “Neural net-
cine and Biology Society, New Orleans, LA, “An efficient R-R interval detection for ECG works for signal processing applications: ECG
1988, pp. 147-148. monitoring system,” IEICE Trans. Inf. Syst., classification,” Australas. Phys. Eng. Sci. Med.,
E82-D, no. 10, pp. 1425-1432, Oct. 1999. vol. 20, no. 3, pp. 147-151, 1997.
[43] S. Haykin, Adaptive Filter Theory, 3rd ed.
(Information and System Sciences Series). [59] B.-U. Köhler, C. Hennig, and R. Orglmeister, [73] S. Mallat, “Zero-crossings of a wave-
Englewood Cliffs, NJ: Prentice-Hall, 1996. “QRS detection using zero crossing counts,” sub- let-transform,” IEEE Trans. Inform. Theory, vol.
mitted for publication, 2001. 37, pp. 1019-1033, 1991.
[44] S. Haykin, Neural Networks, Comprehensive
Foundation, 2nd ed. Piscataway, NJ: IEEE Press, [60] G. Kokturk, “A real-time simulated QRS de- [74] S. Mallat and W.L. Hwang, “Singularity de-
1999. tection system constructed using wavelet filtering tection and processing with wavelets,” IEEE
technique,” in Proc. IEEE-SP Int. Symp. Trans. Inform. Theory, vol. 38, pp. 617-643,
[45] W.P. Holsinger, K.M. Kempner, and M.H. Time-Frequency and Time-Scale Analysis, Pitts- 1992.
Miller, “A QRS preprocessor based on digital dif- burgh, PA, 1998, pp. 281-284.
ferentiation,” IEEE Trans. Biomed. Eng., vol. 18, [75] Massachusetts General Hospital, Massachu-
pp. 121-217, May 1971. [61] A. Kyrkos, E. Giakoumakis, and G. setts General Hospital/Marquette Foundation
Carayannis, “Time recursive prediction tech- Waveform Database, Dr. J. Cooper, MGH, Anes-
[46] S.L. Horowitz, “A syntactic algorithm for niques on QRS detection problem,” in Proc. 9th thesia Bioengineering Unit, Fruit Street, Boston,
peak detection in waveforms with appoications to Annu. Conf. IEEE Engineering in Medicine and MA.
cardiography,” Commun. ACM, vol. 18, pp. Biology Society, 13-16 Nov. 1987, Boston, MA,
281-285, 1975. pp. 1885-1886. [76] Massachusetts Institute of Technology.
M I T - B I H E C G da t a ba s e . Av a i l a b l e :
[47] Y.H. Hu, W.J. Tompkins, J.L. Urrusti, and [62] M. Lagerholm, C. Peterson, G. Braccini, L. http://ecg.mit.edu/.
V.X. Afonso, “Applications of artificial neural Edenbrandt, and L. Soernmo, “Clustering ECG
networks for ECG signal detection and classifica- complexes using Hermite functions and self-orga- [77] C. May, N. Hubing, and A.W. Hahn, “Wave-
tion,” J. Electrocardiology, vol. 26 (Suppl.), pp. nizing maps,” IEEE Trans. Biomed. Eng., vol. 47, let transforms for electrocardiogram processing,”
66-73, 1993. pp. 838-848, 2000. Biomed. Sci. Instrum., vol. 33, pp. 1-6, 1997.
[48] M. Hubelbank and C.L. Feldman, “A 60x [63] P. Laguna, R. Jane, S. Olmos, N.V. Thakor, [78] P. Morizet-Mahoudeaux, C. Moreau, D.
computer-based Holter tape processing system,” H. Rix, and P. Caminal, “Adaptive estimation of Moreau, and J.J. Quarante, “Simple microproces-
Med. Instrum., vol. 12, no. 6, pp. 324-326, 1978. QRS complex wave features of ECG signal by the sor-based system for on-line ECG arrhythmia
56 IEEE ENGINEERING IN MEDICINE AND BIOLOGY January/February 2002
analysis,” Med. Biol. Eng. Comput., vol. 19, no. 4, of ambulatory HRV,” IEEE Trans. Biomed. Eng., latory e.c.g. monitors,” Med. Biol. Eng. Comput.,
pp. 497-501, July 1981. vol. 44, pp. 159-167, 1997. vol. 20, no. 6, pp. 709-714, 1982.
[79] W.C. Mueller, “Arrhythmia detection pro- [95] J.S. Sahambi, S.N. Tandon, and R.K.P. [110] N.V. Thakor, “Reliable R-wave detection
gram for an ambulatory ECG monitor,” Biomed. Bhatt, “Using wavelet transforms for ECG char- from ambulatory subjects,” Biomed. Sci.
Sci. Instrum., vol. 14, pp. 81-85, 1978. acterization. An on-line digital signal processing Instrum., vol. 14, pp. 67-72, 1978.
system,” IEEE Eng. Med. Biol. Mag., vol. 16, pp.
[80] National Research Council (CNR). European [111] W.J. Tompkins, “An approach for physio-
77-83, 1997.
ST-T Database. Institute of Clinical Physiology, logical signal processing by laboratory minicom-
Dept. of Bioengieering and Medical Informatics, [96] L. Senhadji, J.J. Bellanger, G. Carrault, and puter,” Comput. Programs Biomed., vol. 8, no. 1,
Pisa, Italy. Available: http://www.ifc.pi.cnr.it/ J.L. Goatrieux, “Wavelet analysis of ECG sig- pp. 16-28, 1978.
nals,” Annu. Conf. IEEE Engineering in Medicine
[81] M.-E. Nygards and J. Hulting, “An [112] W.J. Tompkins, “A portable microcom-
and Biology Society, vol. 12, pp. 811-812, 1990.
automated system for ECG monitoring,” Comput. puter-based system for biomedical applications,”
Biomed. Res., vol. 12, pp. 181-202, 1979. [97] E. Skordalakis, “Recognition of noisy peaks Biomed. Sci. Instrum., vol. 14, pp. 61-66, 1978.
in ECG waveforms,” Comput. Biomed. Res., vol.
[82] M.-E. Nygards and L. Sörnmo, “Delineation 17, pp. 208-221, 1984. [113] P. Trahanias and E. Skordalakis, “Syntactic
of the QRS complex using the envelope of the pattern recognition of the ECG,” IEEE Trans.
ECG,” Med. Biol. Eng. Comput., vol. 21, 1983. [98] E. Skordalakis, “Syntactic ECG processing: Pattern Anal. Machine Intell., vol. 12, pp.
A review,” Pattern Recognit., vol. 19, no. 4, pp. 648-657, 1990.
[83] M. Okada, “A digital filter for the QRS com- 305-313, 1986.
plex detection,” IEEE Trans. Biomed. Eng., vol. [114] P.E. Trahanias, “An approach to QRS com-
26, pp. 700-703, Dec. 1979. [99] L. Sörnmo, “Time-varying digital filtering of plex detection using mathematical morphology,”
ECG baseline wander,” Med. Biol. Eng. Comput., IEEE Trans. Biomed. Eng., vol. 40, no. 2, pp.
[84] O. Pahlm and L. Sörnmo, “Software QRS de- vol. 31, no. 5, pp. 503-508, 1993.
tection in ambulatory monitoring—A review,” 201-205, 1993.
Med. Biol. Eng. Comput., vol. 22, pp. 289-297, [100] L. Sörnmo, O. Pahlm, and M.-E. Nygards, [115] W.-H. Tsai and K.-S. Fu, “Attributed gram-
1984. “Adaptive QRS detection: A study of perfor- mar—A tool for combining syntactic and statisti-
mance,” IEEE Trans. Biomed. Eng., BME-32, pp. cal approaches to pattern recognition,” IEEE
[85] J. Pan and W.J. Tompkins, “A real-time QRS 392-401, June 1985.
detection algorithm,” IEEE Trans. Biomed. Eng., Trans. Syst., Man, and Cybern., SMC-10, pp.
vol. 32, pp. 230-236, 1985. [101] L. Sörnmo, O. Pahlm, and M.E. Nygards, 873-885, 1980.
“Adaptive QRS detection in ambulatory ECG
[86] G. Papakonstantinou and F. Gritzali, “Syn- [116] F.B. Tuteur, “Wavelet transformations in
monitoring: A study of performance,” in Com-
tactic filtering of ECG waveforms,” Comput. signal detection,” in Proc. ICASSP 88: 1988 Int.
puters in Cardiology. Long Beach, CA: IEEE
Biomed. Res., vol. 14, pp. 158-167, 1981. Conf. Acoustics, Speech, and Signal Processing,
Computer Society, 1982, pp. 201-204.
New York, NY, 1988, pp. 1435-1438.
[87] G. Papakonstantinou, E. Skordalakis, and F. [102] A.L. Spitz and D.C. Harrison, “Automated
Gritzali, “An attribute grammar for QRS detec- [117] J.K. Udupa and I. Murthy, “Syntactin ap-
family classification in ambulatory arrhythmia
tion,” Pattern Recognit., vol. 19, no. 4, pp. proach to ECG rhythm analysis,” IEEE Trans.
monitoring,” Med. Instrum., vol. 12, no. 6, pp.
297-303, 1986. Biomed. Eng., BME-27, pp. 370-375, July 1980.
322-323, 1978.
[88] G.K. Papakonstantinou, “An interpreter of [103] C.A. Steinberg, S. Abraham, and C.A. [118] S.V. Vaseghi, Advanced Signal Processing
attribute grammar and its application to waveform Caceres, “Pattern recognition in the clinical elec- and Digital Noise Reduction. Wiley-Teubner,
analysis,” IEEE Trans. Software Eng., SE-7, pp. trocardiogram,” ISA Trans. Biomed. Electron., 1996.
297-283, May 1981. pp. 23-30, 1962. [119] G. Vijaya, V. Kumar, and H.K. Verma,
[89] Physikalisch-Technische Bundesanstalt. [104] G. Strang and T. Nguyen, Wavelets and Fil- “ANN-based QRS-complex analysis of ECG,” J.
EC G R eferen ce D a t a Se t . A v a i l a b l e : ter Banks. Cambridge, MA: Wellesley-Cam- Med. Eng. Technol., vol. 22, no. 4, pp. 160-167,
http://www.berlin.ptb.de/8/83/831/ bridge Press, 1996. 1998.
dbaccess/ecgrefdataset.html [120] VTT Technical Research Center of Finland.
[105] M.G. Strintzis, G. Stalidis, X. Magnisalis,
[90] V. de Pinto, “Filters for the reduction of base- and N. Maglaveras, “Use of neural networks for I M P R O V E D a t a L i br a r y. A v a i l a b l e :
line wander and muscle artifact in the ECG,” J. electrocardiogram (ECG) feature extraction, rec- http://www.vtt.fi/tte/samba/projects/improve/
Electrocardiology, vol. 25 (Suppl.), pp. 40-48, ognition and classification,” Neural Netw. World, [121] J.G. Webster, “An intelligent monitor for
1992. vol. 3, no. 4, pp. 313-327, 1992. ambulatory ECGs,” Biomed. Sci. Instrum., vol.
[91] R. Poli, S. Cagnoni, and G. Valli, “Genetic [106] Y. Sun, S. Suppappola, and T.A. 14, pp. 55-60, 1978.
design of optimum linear and nonlinear QRS de- Wrublewski, “Microcontroller-based real-time [122] Q. Xue, Y. H. Hu, and W. J. Tompkins,
tectors,” IEEE Trans. Biomed. Eng., vol. 42, pp. QRS detection,” Biomed. Instrum. Technol., vol. “Neural-network-based adaptive matched
1137-1141, 1995. 26, no. 6, pp. 477-484, 1992. filtering for QRS detection,” IEEE Trans.
[92] L.R. Rabiner, “A tutorial on hidden Markov [107] S. Suppappola and Y. Sun, “Nonlinear Biomed. Eng., vol. 39, pp. 317-329, 1992.
models and selected applications in speech recog- transforms of ECG signals for digital QRS detec- [123] B.C. Yu, S. Liu, M. Lee, C.Y. Chen, and
nition,” Proc. IEEE, vol. 77, pp. 257-286, Feb. tion: A quantitative analysis,” IEEE Trans. B.N. Chiang, “A nonlinear digital filter for car-
1989. Biomed. Eng., vol. 41, pp. 397-400, 1994. diac QRS complex detection,” J. Clin. Eng., vol.
[93] K.D. Rao, “Dwt based detection of R-peaks [108] Y. Suzuki, “Self-organizing QRS-wave rec- 10, pp. 193-201, 1985.
and data compression of ECG signals,” IETE J. ognition in ECG using neural networks,” IEEE
[124] S.-K. Zhou, J.-T. Wang, and J.-R. Xu, “The
Res., vol. 43, no. 5, pp. 345-349, 1997. Trans. Neural Networks, vol. 6, pp. 1469-1477,
real-time detection of QRS-complex using the en-
1995.
[94] A. Ruha, S. Sallinen, and S. Nissila, “A velop of ECG,” in Proc. 10th Annu. Int. Conf.,
real-time microprocessor QRS detector system [109] N.V. Thakor and J.G. Webster, “Design and IEEE Engineering in Medicine and Biology Soci-
with a 1-ms timing accuracy for the measurement evaluation of QRS and noise detectors for ambu- ety, New Orleans, LA, 1988, p. 38.
January/February 2002 IEEE ENGINEERING IN MEDICINE AND BIOLOGY 57
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Triathlete's Training Bible: The World's Most Comprehensive Training Guide, 4th Ed. - TrainingDocument5 pagesThe Triathlete's Training Bible: The World's Most Comprehensive Training Guide, 4th Ed. - Trainingrenogodo0% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Personal Grooming PDFDocument8 pagesPersonal Grooming PDFayuNo ratings yet
- Defender 90 110 Workshop Manual 2Document190 pagesDefender 90 110 Workshop Manual 2Jim Brint100% (1)
- Title of Thesis or Practicum or Research Proposal or Report: Firstname M. LastnameDocument17 pagesTitle of Thesis or Practicum or Research Proposal or Report: Firstname M. LastnameDozdi100% (3)
- Cell Transport WorksheetDocument2 pagesCell Transport WorksheetVictoria Niño D100% (1)
- Visit To Delhi Jal Board Water Treatment Plants (Sonia Vihar and Wazirabad)Document5 pagesVisit To Delhi Jal Board Water Treatment Plants (Sonia Vihar and Wazirabad)binukirubaNo ratings yet
- Water Treatment PlantDocument5 pagesWater Treatment PlantbinukirubaNo ratings yet
- Unit 4Document7 pagesUnit 4binukirubaNo ratings yet
- Lesson PlanDocument3 pagesLesson PlanbinukirubaNo ratings yet
- IWCIM Paques 1Document7 pagesIWCIM Paques 1binukirubaNo ratings yet
- Total Variation and Geometric Regularization For Inverse ProblemsDocument49 pagesTotal Variation and Geometric Regularization For Inverse ProblemsbinukirubaNo ratings yet
- Airbnb 2018 PDFDocument8 pagesAirbnb 2018 PDFyodhisaputraNo ratings yet
- Higher Education Loans Board: Loan Disbursement ReportDocument2 pagesHigher Education Loans Board: Loan Disbursement ReportEdward KalvisNo ratings yet
- WPI PharmaceuticalsDocument23 pagesWPI PharmaceuticalsKyle Millar-CorlissNo ratings yet
- NWPC Annual Report 2014Document56 pagesNWPC Annual Report 2014lupethe3No ratings yet
- Semantic Analysis of The Verbal Phraseological Units On The Examples in The German, English and Karakalpak LanguagesDocument3 pagesSemantic Analysis of The Verbal Phraseological Units On The Examples in The German, English and Karakalpak LanguagesEditor IJTSRDNo ratings yet
- Development LetterDocument3 pagesDevelopment Lettertan balanNo ratings yet
- 7th Circular Motion SolutionsDocument60 pages7th Circular Motion SolutionsAjay D KumarNo ratings yet
- Independent Contractor Agreement For Accountant & BookkeeperDocument7 pagesIndependent Contractor Agreement For Accountant & BookkeeperWen' George BeyNo ratings yet
- Pilot Learn English Now Eng0343Document18 pagesPilot Learn English Now Eng0343pedro.muneerNo ratings yet
- Boiler Design BasicsDocument92 pagesBoiler Design Basicskumarkaul100% (10)
- 42 Different Types of Wrenches Explained in Detail Notes PDFDocument24 pages42 Different Types of Wrenches Explained in Detail Notes PDFMuhammad ZainNo ratings yet
- TErmination Letter-ContractorDocument1 pageTErmination Letter-ContractorBojoNo ratings yet
- Algorithm Exam HelpDocument9 pagesAlgorithm Exam HelpProgramming Exam HelpNo ratings yet
- Schofield1998 - The Mohr-Coulomb Error CorrectionDocument3 pagesSchofield1998 - The Mohr-Coulomb Error CorrectionandresmelodNo ratings yet
- 10 CodesDocument4 pages10 Codestirso TansoNo ratings yet
- Help Utf8Document8 pagesHelp Utf8Jorge Diaz LastraNo ratings yet
- Manual Safety SignDocument49 pagesManual Safety SignMuamar DhikriNo ratings yet
- Integration Patterns and PracticesDocument53 pagesIntegration Patterns and PracticesatifhassansiddiquiNo ratings yet
- Analysis of Gilad Hekselman's Feauture On Smile Like That by Esperanza SpaldingDocument4 pagesAnalysis of Gilad Hekselman's Feauture On Smile Like That by Esperanza SpaldingJordan Kerr100% (1)
- vct49xyi-SPEC 2003.12.121Document374 pagesvct49xyi-SPEC 2003.12.121Micu Adrian DanutNo ratings yet
- Stroke - Wikipedia, The Free EncyclopediaDocument31 pagesStroke - Wikipedia, The Free EncyclopediaRhonskiiNo ratings yet
- Database Efficiency and TuningDocument22 pagesDatabase Efficiency and TuningJyothy SwaroopNo ratings yet
- CBT Nuggets Ccent & Ccna - Season 1 ListDocument5 pagesCBT Nuggets Ccent & Ccna - Season 1 ListRusu AlexandruNo ratings yet
- Kuliah 02 - Pengolahan Citra Digital Sampling Quantization 2Document18 pagesKuliah 02 - Pengolahan Citra Digital Sampling Quantization 2Zulkifli Nagh BalitanNo ratings yet
- GRP 1Document2 pagesGRP 1Yuva RaniNo ratings yet