You might also like
- HDL-BUS Pro UDP Protocal and Device Type (Eng) PDFDocument12 pagesHDL-BUS Pro UDP Protocal and Device Type (Eng) PDFAnonymous of8mnvHNo ratings yet
- Lab ManualDocument42 pagesLab ManualJerico Renzo Taligatos VicedoNo ratings yet
- RH199 RHCSA Rapid Track CourseDocument3 pagesRH199 RHCSA Rapid Track CourseMarioNo ratings yet
- KHB Can BusDocument5 pagesKHB Can BusGIRINITH RNo ratings yet
- Bioloid DynamixelDocument53 pagesBioloid DynamixelEduardo ZavalaNo ratings yet
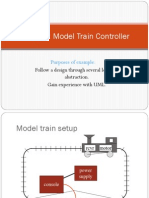
- Example: Model Train ControllerDocument41 pagesExample: Model Train ControlleranishadandaNo ratings yet
- Hitec HSR-8498HB Digital Servo Operation and Interface: Revision 0.5 Updated 24 January 2007Document10 pagesHitec HSR-8498HB Digital Servo Operation and Interface: Revision 0.5 Updated 24 January 2007charlie1123No ratings yet
- 13.56mhz Rfid ManualDocument13 pages13.56mhz Rfid Manualerwin2590No ratings yet
- HSR Serial CommunicationDocument10 pagesHSR Serial CommunicationLe Dinh PhongNo ratings yet
- VC 0706 ProtocolDocument23 pagesVC 0706 Protocolyrag182No ratings yet
- Chapter1 Train UML ExampleDocument35 pagesChapter1 Train UML ExampleSanthoshreddy GogulaNo ratings yet
- AK SeriesDocument10 pagesAK Series徐義勝No ratings yet
- T661x UART Protocol - Customer Rev1Document11 pagesT661x UART Protocol - Customer Rev1dmvas100% (1)
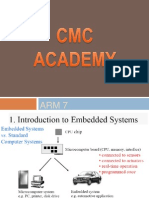
- CMC ArmDocument79 pagesCMC ArmMujikeer MohammedNo ratings yet
- Energy Meter Reading Protocol AND Calibration Protocol VTEMS11-VT11Document15 pagesEnergy Meter Reading Protocol AND Calibration Protocol VTEMS11-VT11Narender SaineniNo ratings yet
- Embedded Rev ThreeDocument12 pagesEmbedded Rev ThreeishmaelnjihiaNo ratings yet
- R305 User ManualDocument26 pagesR305 User ManualchandrasekarNo ratings yet
- Using The Hall Decoder (HD) eTPU Function: Covers The MCF523x, MPC5500, and All eTPU-equipped DevicesDocument20 pagesUsing The Hall Decoder (HD) eTPU Function: Covers The MCF523x, MPC5500, and All eTPU-equipped Devicesnarayana swamyNo ratings yet
- C Homework #11Document3 pagesC Homework #11Saurabh GuptaNo ratings yet
- TCP/IP Socket Connection To The Lasersystem: General DescriptionDocument38 pagesTCP/IP Socket Connection To The Lasersystem: General DescriptionDhani Xp89No ratings yet
- Cj1m-Cpu-Etn Ds e 2 1 csm1794 PDFDocument13 pagesCj1m-Cpu-Etn Ds e 2 1 csm1794 PDFSue Zushy Escobar PazNo ratings yet
- Mpa Question Bank1Document16 pagesMpa Question Bank1Sharon FrancisNo ratings yet
- Project Construction: 3.1 HC-05 Bluetooth To Serial Port ModuleDocument8 pagesProject Construction: 3.1 HC-05 Bluetooth To Serial Port Moduleanugya sharmaNo ratings yet
- M340 and ATV71 Using ModbusTCPIP and Data - Exch FunctionDocument9 pagesM340 and ATV71 Using ModbusTCPIP and Data - Exch FunctionJose MarcialNo ratings yet
- PPLADocument55 pagesPPLAdreamafonNo ratings yet
- At Mel ServoDocument11 pagesAt Mel ServoprshanNo ratings yet
- Isa 1Document13 pagesIsa 1awais_alii56No ratings yet
- New TOPCNC TC55V Instruction ManualDocument14 pagesNew TOPCNC TC55V Instruction ManualCarlos SerranoNo ratings yet
- Aeon Hem Tech PDFDocument9 pagesAeon Hem Tech PDFJohn LeeNo ratings yet
- A Master-Slave DSP Board For Digital ControlDocument5 pagesA Master-Slave DSP Board For Digital Controlfurious143No ratings yet
- ADC Program For LPC2138Document8 pagesADC Program For LPC2138hypernuclide100% (1)
- TOPCNC TC55V Instruction Manual: TOPCNC Automation Technology Co., Ltd. Felicia JiaDocument13 pagesTOPCNC TC55V Instruction Manual: TOPCNC Automation Technology Co., Ltd. Felicia Jiaanhthong3kNo ratings yet
- FPGA-based Direct Conversion Receiver With Continuous Acquisition To A PCDocument25 pagesFPGA-based Direct Conversion Receiver With Continuous Acquisition To A PCJeong-geun KimNo ratings yet
- Communication Protocol RFID-M1Document29 pagesCommunication Protocol RFID-M1Boubekeur AisNo ratings yet
- Unit 1Document27 pagesUnit 1meetsanthoshNo ratings yet
- TOPCNC TC55V Instruction ManualDocument13 pagesTOPCNC TC55V Instruction Manualanhthong3kNo ratings yet
- Ecu P240 Command PDFDocument9 pagesEcu P240 Command PDFChristopher Santos100% (1)
- DC Motor Speed ControlDocument5 pagesDC Motor Speed ControlAnita WulansariNo ratings yet
- PLC Counters... Timers Vikas M SampathDocument57 pagesPLC Counters... Timers Vikas M SampathVikas M SampathNo ratings yet
- Ferrettronics Ft639 Servo Controller Chip: Data SheetDocument7 pagesFerrettronics Ft639 Servo Controller Chip: Data SheetAldo DimasNo ratings yet
- TOPCNC TC55V Instruction ManualDocument13 pagesTOPCNC TC55V Instruction ManualLuis Otavio TrindadeNo ratings yet
- Binary Multiplication: University of Diyala College of Engineering Electronic Department Fourth StageDocument5 pagesBinary Multiplication: University of Diyala College of Engineering Electronic Department Fourth Stageبتوڷ حسن حسيےن ڪْاظـمNo ratings yet
- GLOFA PLC ModbusFunctionBlock (ENG)Document10 pagesGLOFA PLC ModbusFunctionBlock (ENG)ejhagunNo ratings yet
- ICS 3.5 Serial Manager ManualDocument10 pagesICS 3.5 Serial Manager ManualCarlos HernándezNo ratings yet
- How To Run GudsDocument4 pagesHow To Run Gudsunix adminNo ratings yet
- Delayed Branch Logic: Texas Instruments TMS320 Is A Blanket Name For A Series ofDocument13 pagesDelayed Branch Logic: Texas Instruments TMS320 Is A Blanket Name For A Series ofnomadcindrellaNo ratings yet
- Argox - PPLADocument53 pagesArgox - PPLAArchitectCPNo ratings yet
- A Brief History of Micro ProgrammingDocument17 pagesA Brief History of Micro Programmingmehima10No ratings yet
- Dron Controller Listing ProgramDocument3 pagesDron Controller Listing ProgramAl MtdrsNo ratings yet
- Interfacing The Keyboard To 8051 Micro Controller 11Document10 pagesInterfacing The Keyboard To 8051 Micro Controller 11rajinikanth100% (1)
- Programmable Interval Timer 8253: Architecture of 8253Document13 pagesProgrammable Interval Timer 8253: Architecture of 8253Srikanth KodothNo ratings yet
- FreyrSCADA IEC 60870 5 104 Server Simulator User ManualDocument33 pagesFreyrSCADA IEC 60870 5 104 Server Simulator User ManualHoang Tran DinhNo ratings yet
- Sms Based Stepper Motor ControlDocument15 pagesSms Based Stepper Motor ControlSagar CoolkarniNo ratings yet
- 32 Servo Controller ManualDocument12 pages32 Servo Controller ManualceltilanderNo ratings yet
- 3 Waukesha Gas Engine Maintenance ManualDocument75 pages3 Waukesha Gas Engine Maintenance ManualMamunNo ratings yet
- #Use Delay: Speed Is A Constant 1-100000000 (1 HZ To 100 MHZ)Document1 page#Use Delay: Speed Is A Constant 1-100000000 (1 HZ To 100 MHZ)diegoifgNo ratings yet
- Apb Vip User Manual PDFDocument18 pagesApb Vip User Manual PDFChandan ChoudhuryNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Comm002 Reviewer Quiz 1 MidtermsDocument6 pagesComm002 Reviewer Quiz 1 MidtermsShiela MendozaNo ratings yet
- Hitachi Shadow ImageDocument218 pagesHitachi Shadow Imagekchaitanya kaluvaNo ratings yet
- CAS-003 Exam Questions and Answers - CAS-003 Dumps 2018Document14 pagesCAS-003 Exam Questions and Answers - CAS-003 Dumps 2018Donald Harper0% (1)
- MXM Version 3.0.Document11 pagesMXM Version 3.0.carlosxxx1234No ratings yet
- Digital JewelryDocument22 pagesDigital JewelrySaikumar TallaNo ratings yet
- A B D C: Present State Next State X 0 X 1 Output yDocument3 pagesA B D C: Present State Next State X 0 X 1 Output yAvdhesh GuptaNo ratings yet
- Yamaha RX V667 ManualDocument144 pagesYamaha RX V667 ManualJonathan KroeningNo ratings yet
- What Is Computer Program?Document60 pagesWhat Is Computer Program?Zed DeguzmanNo ratings yet
- ICT Development Index 2012 PDFDocument230 pagesICT Development Index 2012 PDFmayuresh1101No ratings yet
- NETWORKING BCA WBUT 5th SEM NOTESDocument135 pagesNETWORKING BCA WBUT 5th SEM NOTESapi-1958925986% (22)
- IP AddressDocument72 pagesIP Addressvinit.vermaNo ratings yet
- Ssignmen: Q.1: Choose The Correct WordDocument8 pagesSsignmen: Q.1: Choose The Correct WordEE PWDNo ratings yet
- Hardware Certification Report - 1152921504626450757 PDFDocument1 pageHardware Certification Report - 1152921504626450757 PDFJoseIgnacioNo ratings yet
- Magic Quadrant For Client Management ToolsDocument10 pagesMagic Quadrant For Client Management Toolsknokturnal839No ratings yet
- Cronos Pro ReadmeDocument2 pagesCronos Pro ReadmemartinomagnificoNo ratings yet
- 01.4 Network Diagram HintsDocument6 pages01.4 Network Diagram HintsRavi NakarmiNo ratings yet
- Ex 2200Document8 pagesEx 2200yuddddNo ratings yet
- SQL FanTrapDocument7 pagesSQL FanTrapbharadwaja.chNo ratings yet
- Code Programcxfvdsing Retgd Emsasdfsd7Document94 pagesCode Programcxfvdsing Retgd Emsasdfsd7Al7amdlellahNo ratings yet
- sjzl20095126-ZXR10 59005200 (V2.8.23A) Series All Gigabit-Port Intelligent Routing Switch User Manual (Basic Configuration Volume) - 552574 PDFDocument185 pagessjzl20095126-ZXR10 59005200 (V2.8.23A) Series All Gigabit-Port Intelligent Routing Switch User Manual (Basic Configuration Volume) - 552574 PDFDabin ClovisNo ratings yet
- Mks Mini DatasheetDocument6 pagesMks Mini Datasheetj100% (1)
- Coa Unit IvDocument147 pagesCoa Unit IvDevika csbsNo ratings yet
- Remote Access Request FormDocument6 pagesRemote Access Request FormShailesh ShekharNo ratings yet
- Atpg DofileDocument5 pagesAtpg DofilesenthilkumarNo ratings yet
- CP R75.40 Gaia AdminGuideDocument214 pagesCP R75.40 Gaia AdminGuideSteven SalasNo ratings yet
- Log 05072020Document3 pagesLog 05072020Linzaw OoNo ratings yet
- SeisanDocument366 pagesSeisanKosygin LeishangthemNo ratings yet
- Datasheet IPC6252SL-X33UPDocument5 pagesDatasheet IPC6252SL-X33UPvalladaresoscarNo ratings yet
- Using Vmrun To Control Virtual Machines: Vmware Workstation 7.0 Vmware Fusion 3.0 Vmware Vsphere 4 Vmware Server 2.0Document20 pagesUsing Vmrun To Control Virtual Machines: Vmware Workstation 7.0 Vmware Fusion 3.0 Vmware Vsphere 4 Vmware Server 2.0BlueilNo ratings yet