You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Free Standing Tension StructuresDocument255 pagesFree Standing Tension StructuresJoaquin VieraNo ratings yet
- Algorithms (Complete Course) :-Btech CSE: TopicsDocument4 pagesAlgorithms (Complete Course) :-Btech CSE: TopicsRahul SinghNo ratings yet
- Microsoft Office 365 Customer Decision FrameworkDocument14 pagesMicrosoft Office 365 Customer Decision FrameworkthinkofdevilNo ratings yet
- 26-1208-01 Evolution of Silicon-Based Technology in CoatingsDocument10 pages26-1208-01 Evolution of Silicon-Based Technology in Coatingskreci1No ratings yet
- Personal Grooming PDFDocument8 pagesPersonal Grooming PDFayuNo ratings yet
- Midterms 88%Document18 pagesMidterms 88%jrence80% (5)
- Three-Quater Face Schematics PDFDocument20 pagesThree-Quater Face Schematics PDFSchiteanu ClaudiuNo ratings yet
- Process Pump ControlDocument4 pagesProcess Pump ControlBramJanssen76No ratings yet
- Kingspan Isoeste 4881 - Fechamento Frigo e IsofachadaDocument3 pagesKingspan Isoeste 4881 - Fechamento Frigo e IsofachadaJoaquin VieraNo ratings yet
- Advances in Dynamic Relaxation Techniques For Nonlinear Finite Element AnalysisDocument7 pagesAdvances in Dynamic Relaxation Techniques For Nonlinear Finite Element AnalysisJoaquin VieraNo ratings yet
- Construction and Building Materials: Frank Küsel, Elsabe KearsleyDocument13 pagesConstruction and Building Materials: Frank Küsel, Elsabe KearsleyJoaquin VieraNo ratings yet
- Kingspan Isoeste Assembly 391088-0-0 (Isotelha PIR)Document5 pagesKingspan Isoeste Assembly 391088-0-0 (Isotelha PIR)Joaquin VieraNo ratings yet
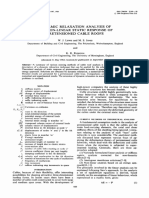
- Dynamic Relaxation Analysis of The Non-Linear Static Response of Pretensioned Cable RoofsDocument9 pagesDynamic Relaxation Analysis of The Non-Linear Static Response of Pretensioned Cable RoofsJoaquin VieraNo ratings yet
- Accelerated Relaxation' or Direct Solution? Future Prospects For FemDocument11 pagesAccelerated Relaxation' or Direct Solution? Future Prospects For FemJoaquin VieraNo ratings yet
- Adaptive Dynamic Relaxation Algorithm For Non-Linear Hyperelastic StructuresDocument19 pagesAdaptive Dynamic Relaxation Algorithm For Non-Linear Hyperelastic StructuresJoaquin VieraNo ratings yet
- B.H.V. Topping and A.I. KhanDocument46 pagesB.H.V. Topping and A.I. KhanJoaquin VieraNo ratings yet
- Note Dynamic Relaxation: Ax A A Is A Real Positive Definite Matrix (E.g. It Could Be A Typical Stiffness Matrix)Document3 pagesNote Dynamic Relaxation: Ax A A Is A Real Positive Definite Matrix (E.g. It Could Be A Typical Stiffness Matrix)Joaquin VieraNo ratings yet
- Lewis Mode Los 2Document8 pagesLewis Mode Los 2Joaquin VieraNo ratings yet
- A Simplified Finite Element Model For Structural Cable Bending MechanismDocument15 pagesA Simplified Finite Element Model For Structural Cable Bending MechanismJoaquin VieraNo ratings yet
- Lewis Mode LosDocument10 pagesLewis Mode LosJoaquin VieraNo ratings yet
- Computational Methods For Zero StressDocument16 pagesComputational Methods For Zero StressJoaquin VieraNo ratings yet
- linkwitzDirectAproach FDDocument15 pageslinkwitzDirectAproach FDJoaquin VieraNo ratings yet
- HuuDocument10 pagesHuuJoaquin VieraNo ratings yet
- SCE - EN - 032-600 Global Data Blocks - S7-1500 - R1508Document39 pagesSCE - EN - 032-600 Global Data Blocks - S7-1500 - R1508rakesgNo ratings yet
- Genuity Systems Limited: Membership, Certification and LicenseDocument4 pagesGenuity Systems Limited: Membership, Certification and LicenseshafatNo ratings yet
- Social Customer Relationship Management (SCRM) - Application and TechnologyDocument9 pagesSocial Customer Relationship Management (SCRM) - Application and TechnologyThu TrangNo ratings yet
- Javascript: Case Study To Be Used For Hands-On SessionsDocument14 pagesJavascript: Case Study To Be Used For Hands-On SessionsSettiNagarajuNo ratings yet
- Database Efficiency and TuningDocument22 pagesDatabase Efficiency and TuningJyothy SwaroopNo ratings yet
- Problems - Tax and BSDocument5 pagesProblems - Tax and BSNguyễn Thùy LinhNo ratings yet
- Device Related Error in Patient Controlled.17Document6 pagesDevice Related Error in Patient Controlled.17Ali ÖzdemirNo ratings yet
- Kurukh GrammarDocument184 pagesKurukh GrammarBHABANI SHANKAR MINZNo ratings yet
- 10 CodesDocument4 pages10 Codestirso TansoNo ratings yet
- Strategy SolutionsDocument2 pagesStrategy SolutionsIbrahim OsmanNo ratings yet
- Latihan SoalDocument7 pagesLatihan SoaljuliaNo ratings yet
- CS687 - Access Control 1 - Spring 2020Document41 pagesCS687 - Access Control 1 - Spring 2020Dawit GetchoNo ratings yet
- Newsflash MagazineDocument64 pagesNewsflash MagazineIan LuoNo ratings yet
- Types of Flooring in HospitalDocument6 pagesTypes of Flooring in HospitalFiza Amim KhanNo ratings yet
- DWDM Equipment-Alcatel 1620Document28 pagesDWDM Equipment-Alcatel 1620Cvenoth Kumar100% (2)
- DOH Breast Cancer Guidelines FinalDocument123 pagesDOH Breast Cancer Guidelines Finalsupratimbiswas073380No ratings yet
- CS317 IR W1aDocument20 pagesCS317 IR W1aHatim Juzer KhambatwalaNo ratings yet
- SPM Practice June 29Document7 pagesSPM Practice June 29Isabel GohNo ratings yet
- Pebble in The Pond by David MerrillDocument22 pagesPebble in The Pond by David MerrillKangdon Lee100% (3)
- STOD-GEN-AED-0000-ME-SPE-0012 - Functional Specification For AGP Booster PumpsDocument14 pagesSTOD-GEN-AED-0000-ME-SPE-0012 - Functional Specification For AGP Booster PumpsAHMED AMIRANo ratings yet
- MISSISSIPPI Chanery ClerksDocument7 pagesMISSISSIPPI Chanery Clerks2PlusNo ratings yet
- Piyush Mulkar: Cleveland, OHDocument6 pagesPiyush Mulkar: Cleveland, OHRadha RamineniNo ratings yet
- E38 Closed Circuit Current TestDocument4 pagesE38 Closed Circuit Current TestCezaryCezasNo ratings yet