You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Modern Urban and Regional EconomicsDocument434 pagesModern Urban and Regional EconomicsDwi Wahyuniati100% (3)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Mathema PDFDocument6 pagesMathema PDFErland Garcia Ruiz Filho0% (4)
- Authority Submission List in MalaysiaDocument3 pagesAuthority Submission List in MalaysiaWan Mahiram100% (4)
- Black Friday WorksheetDocument2 pagesBlack Friday WorksheetPaula Valentina Saenz SeguraNo ratings yet
- Pale Digests Part 1Document24 pagesPale Digests Part 1dingNo ratings yet
- Date Subject Unit Topic Name: Overview of SQL InjectionDocument4 pagesDate Subject Unit Topic Name: Overview of SQL InjectionKshitija KulkarniNo ratings yet
- Adaptive CruiseDocument15 pagesAdaptive CruisemaheshfbNo ratings yet
- Research BookDocument28 pagesResearch Booknajib yareNo ratings yet
- Exp.1 Basic SignalsDocument8 pagesExp.1 Basic SignalsDeepesh AgrawalNo ratings yet
- Model and Implementation of E-Commerce Recommendation System Based On User ClusteringDocument4 pagesModel and Implementation of E-Commerce Recommendation System Based On User ClusteringBüşra AydınNo ratings yet
- Mod5 H2S QuizDocument15 pagesMod5 H2S QuizMhanna AY100% (1)
- Blanco D. Practical OpenTelemetry... Across Your Organization 2023Document250 pagesBlanco D. Practical OpenTelemetry... Across Your Organization 2023apsaxena24No ratings yet
- Study On Currency Derivatives and Their Impact On Value of CurrencyDocument11 pagesStudy On Currency Derivatives and Their Impact On Value of CurrencyMounisha MounishaNo ratings yet
- Rangisetti Naga SumalikaDocument10 pagesRangisetti Naga SumalikaThe rockNo ratings yet
- Rev CTA 8835 8790 Chevron Holdings Inc vs. CIRDocument20 pagesRev CTA 8835 8790 Chevron Holdings Inc vs. CIRJerome Delos ReyesNo ratings yet
- To Study The Variations of Current Flowing in A C...Document2 pagesTo Study The Variations of Current Flowing in A C...K U P RNo ratings yet
- Cabanez v. SolanoDocument3 pagesCabanez v. SolanoMishel EscañoNo ratings yet
- Definition and Characteristics of MediationDocument2 pagesDefinition and Characteristics of MediationMohammad Mofizur RahmanNo ratings yet
- Root Cause AnalysisDocument61 pagesRoot Cause Analysisdaniel kivumbiNo ratings yet
- What Are Examples of How Staffing Activities Are Influenced by Training Activities? Compensation Activities?Document7 pagesWhat Are Examples of How Staffing Activities Are Influenced by Training Activities? Compensation Activities?Clinton RegerstNo ratings yet
- Cot 1 DLLDocument4 pagesCot 1 DLLJayson Deocareza Dela TorreNo ratings yet
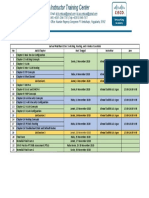
- Jadwal CCNA-Switching, Routing, Wireless Essentials PDFDocument1 pageJadwal CCNA-Switching, Routing, Wireless Essentials PDFmutia faridaNo ratings yet
- Web ViewerDocument3 pagesWeb ViewerMauricio AravenaNo ratings yet
- Javier v. SandiganbayanDocument1 pageJavier v. SandiganbayanSean HinolanNo ratings yet
- LCS FactsheetDocument4 pagesLCS FactsheetPratik BhagatNo ratings yet
- Funda 1 List - Partition - May 29thDocument4 pagesFunda 1 List - Partition - May 29thapi-3745527No ratings yet
- Test 5 UTE chưa gảiDocument38 pagesTest 5 UTE chưa gảiMỹ ThắmNo ratings yet
- Sample Chapters For Animation in HTML, CSS, and JavaScriptDocument52 pagesSample Chapters For Animation in HTML, CSS, and JavaScriptKirupaChinnathambiNo ratings yet
- Rule 33. Go-Yu Vs YuDocument3 pagesRule 33. Go-Yu Vs Yu.100% (1)
- Schematic - Zigbee Stick 4.0 CH340CDocument1 pageSchematic - Zigbee Stick 4.0 CH340CSergey SuloevNo ratings yet