You might also like
- Microprocessors & their Operating Systems: A Comprehensive Guide to 8, 16 & 32 Bit Hardware, Assembly Language & Computer ArchitectureFrom EverandMicroprocessors & their Operating Systems: A Comprehensive Guide to 8, 16 & 32 Bit Hardware, Assembly Language & Computer ArchitectureRating: 1 out of 5 stars1/5 (1)
- Micro ControllerDocument63 pagesMicro ControllersriscribdNo ratings yet
- Mega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3From EverandMega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3No ratings yet
- 8085 Introduction - OptDocument36 pages8085 Introduction - OptVenkatasamy EEENo ratings yet
- Reviewof Microprocessor PDFDocument23 pagesReviewof Microprocessor PDFSatyam KumarNo ratings yet
- MPMC Unit I 2021Document17 pagesMPMC Unit I 2021Venkatasamy EEENo ratings yet
- Asynchronous IDocument4 pagesAsynchronous IJiever AustriaNo ratings yet
- Microprocessors and Its Applications EssayDocument15 pagesMicroprocessors and Its Applications EssayAshish BirwalNo ratings yet
- MP QabankDocument81 pagesMP QabankPreethamkumarms PreethamNo ratings yet
- Milestone of MicrocontrollersDocument2 pagesMilestone of MicrocontrollersJhay-r PanaNo ratings yet
- Unit 1Document32 pagesUnit 1jayant kumarNo ratings yet
- MicroprocessorsDocument25 pagesMicroprocessorsMohammad ArifNo ratings yet
- MicrocontrollerDocument23 pagesMicrocontrollerANKIT PATHAKNo ratings yet
- 8051 Controller: 8051 Is 8-Bit Microcontroller of MCS-51 Family First Introduced by Intel in 1980Document6 pages8051 Controller: 8051 Is 8-Bit Microcontroller of MCS-51 Family First Introduced by Intel in 1980sheenuNo ratings yet
- Arif MP Assig.Document25 pagesArif MP Assig.Satyam KumarNo ratings yet
- BANK SECURITY SYSTEM WITH AUTO DIALER NewDocument21 pagesBANK SECURITY SYSTEM WITH AUTO DIALER NewCrispNo ratings yet
- Microprocessor and Its Applications - Bridge Cource MaterialDocument15 pagesMicroprocessor and Its Applications - Bridge Cource Materialsanchiga nandhiniNo ratings yet
- Asynchronous I-III (Austria, Jiever Neil N.)Document11 pagesAsynchronous I-III (Austria, Jiever Neil N.)Jiever AustriaNo ratings yet
- Bluetooth Based Home Appliances ControllerDocument77 pagesBluetooth Based Home Appliances ControllerCrispNo ratings yet
- MP-MC R16 - Unit-5Document52 pagesMP-MC R16 - Unit-5satyanarayana12No ratings yet
- The X86 Microprocessor & Alp: Microprocessors and MicrocontrollersDocument56 pagesThe X86 Microprocessor & Alp: Microprocessors and MicrocontrollersNaveen NNo ratings yet
- 8085 MicroprocessorDocument37 pages8085 MicroprocessorTilottama Deore100% (1)
- Microcontroller 8051 FamilyDocument23 pagesMicrocontroller 8051 FamilyMd AyyubNo ratings yet
- Microprocessors & Interfacing For GITAM University ECEDocument118 pagesMicroprocessors & Interfacing For GITAM University ECEDr Sreenivasa Rao Ijjada100% (1)
- MM Module1 Cse Notes PDFDocument56 pagesMM Module1 Cse Notes PDFPrajwal S MNo ratings yet
- Microprocessor and Programming 4TH SEM CM-IfDocument174 pagesMicroprocessor and Programming 4TH SEM CM-IfAbha SinghNo ratings yet
- MPMC Mod-1Document32 pagesMPMC Mod-1Syeda AfreenNo ratings yet
- Introduction To The Microprocefghgfhgfhdgf AND Development of MicrocontrollersDocument13 pagesIntroduction To The Microprocefghgfhgfhdgf AND Development of Microcontrollersrjawy alasadyNo ratings yet
- 8051 Notes NewDocument70 pages8051 Notes NewWajahatNo ratings yet
- Intel CpusDocument37 pagesIntel Cpus我叫政揚UwUNo ratings yet
- Prepaid Card Petrol BankDocument67 pagesPrepaid Card Petrol Bankimran kadriNo ratings yet
- Micro Controller Archtecture ProgrammingDocument94 pagesMicro Controller Archtecture ProgrammingyayavaramNo ratings yet
- Intel 8051 MCDocument3 pagesIntel 8051 MCVipul GargNo ratings yet
- 8051Document17 pages8051Eward KenNo ratings yet
- Micro Controller 8051Document16 pagesMicro Controller 8051Gaurav Tripathi100% (1)
- ARCHITECHTURE of 8085Document35 pagesARCHITECHTURE of 8085Aakash GargNo ratings yet
- Part 1Document66 pagesPart 1souleymanefomba57No ratings yet
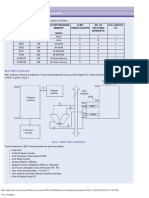
- Eight-Bit Microcontrollers: Manufacturer:mode L Pins I/O Counter RAM (Bytes) ROM (Bytes) Orther FeaturesDocument6 pagesEight-Bit Microcontrollers: Manufacturer:mode L Pins I/O Counter RAM (Bytes) ROM (Bytes) Orther FeaturesAfiv SetyajiNo ratings yet
- Introduction To 8086Document26 pagesIntroduction To 8086E.VigneshNo ratings yet
- List of Intel Microprocessors: Participate in The World's Largest Photo Competition and Help Improve Wikipedia!Document52 pagesList of Intel Microprocessors: Participate in The World's Largest Photo Competition and Help Improve Wikipedia!Atul YadavNo ratings yet
- Brief History of The X86 Family:: Evolution From 8080/8085 To 8086Document15 pagesBrief History of The X86 Family:: Evolution From 8080/8085 To 8086vadla77No ratings yet
- 02 Introduction To MicrocontrollersDocument120 pages02 Introduction To MicrocontrollersGaurav BansalNo ratings yet
- 8086 Architecture and Pin DiscriptionDocument20 pages8086 Architecture and Pin DiscriptionDr Sreenivasa Rao IjjadaNo ratings yet
- The X86 Microprocessor: ObjectivesDocument32 pagesThe X86 Microprocessor: Objectivespapikhu36100% (4)
- Chapter 2 - Embedded System ProcessorsDocument7 pagesChapter 2 - Embedded System ProcessorsStephanie CalabungNo ratings yet
- 8085 HistoryDocument20 pages8085 HistoryabhaysunderNo ratings yet
- 4.1 Introduction and Features of 8051Document4 pages4.1 Introduction and Features of 8051Smarajit MishraNo ratings yet
- 8051 MicrcontrollerDocument7 pages8051 MicrcontrollerRAMESH MIRDHANo ratings yet
- MicropDocument5 pagesMicropNaza RenkoNo ratings yet
- The Evolution of Microprocessor From 4-Bits To 64-Bits. (Info-Graphics)Document43 pagesThe Evolution of Microprocessor From 4-Bits To 64-Bits. (Info-Graphics)Abhi Sharma100% (1)
- Exp1 SensorlabDocument4 pagesExp1 SensorlabGautamkrishna ChintaNo ratings yet
- Micro Processer 8086-1Document91 pagesMicro Processer 8086-1نورالدين علي عليNo ratings yet
- UmarDocument6 pagesUmarattaullahjohar040No ratings yet
- Presentation On History of MicroprocessorsDocument11 pagesPresentation On History of MicroprocessorsY_ShiraskarNo ratings yet
- UNIT-5: 8051 MicrocontrollerDocument25 pagesUNIT-5: 8051 MicrocontrollerSachin KhandelwalNo ratings yet
- Module 4 - CODocument10 pagesModule 4 - COAnnabelleNo ratings yet
- Poriyaan 1saxvBL6xpqZak6jOwx mFCPlMixrGDZmDocument37 pagesPoriyaan 1saxvBL6xpqZak6jOwx mFCPlMixrGDZmS. GobikaNo ratings yet
- Embedded System Assignment 1Document16 pagesEmbedded System Assignment 1Farhat AbbasNo ratings yet
- MM Module1 CseDocument137 pagesMM Module1 CseAnonymous ivcUHwjChENo ratings yet
- Module 1 POP NotesDocument41 pagesModule 1 POP NotesDeepikaNo ratings yet
- Basic Electronics and Communication Engineering (21ELN14/21ELN24) - Embedded Systems (Module 3)Document130 pagesBasic Electronics and Communication Engineering (21ELN14/21ELN24) - Embedded Systems (Module 3)Shrishail Bhat100% (2)
- AN4621 Application Note: STM32L4 and STM32L4+ Ultra-Low-Power Features OverviewDocument31 pagesAN4621 Application Note: STM32L4 and STM32L4+ Ultra-Low-Power Features OverviewChris HockubaNo ratings yet
- UNIT-3: Short QuestionsDocument39 pagesUNIT-3: Short Questionsbasampally yeshwanthNo ratings yet
- Comprog ReviewerDocument11 pagesComprog ReviewerRovic VistaNo ratings yet
- Generation of Operating SstemDocument11 pagesGeneration of Operating SstemsajithNo ratings yet
- Embedded LaboratoryDocument95 pagesEmbedded LaboratoryRajkumar kkNo ratings yet
- Assignment 1Document2 pagesAssignment 1Arjita BhanNo ratings yet
- Common List of Bottlenecks in Performance TestingDocument3 pagesCommon List of Bottlenecks in Performance TestingcidBookBeeNo ratings yet
- OpenHardwareMonitor ReportDocument17 pagesOpenHardwareMonitor ReportTran HieuNo ratings yet
- Computer Science Project Work Grade 11 HSEB NOTESDocument46 pagesComputer Science Project Work Grade 11 HSEB NOTESjay sambooNo ratings yet
- Final Sup ExamDocument10 pagesFinal Sup ExamtesfuNo ratings yet
- Unix WDocument196 pagesUnix Wn.rajeshNo ratings yet
- Self-Instructional Manual (SIM) For Self-Directed Learning (SDL)Document30 pagesSelf-Instructional Manual (SIM) For Self-Directed Learning (SDL)Geoffrey Beenie P. Orpia100% (1)
- More Mysteries of Technology - .S - Stuart CarapolaDocument78 pagesMore Mysteries of Technology - .S - Stuart CarapolaRajNo ratings yet
- S 1711Document96 pagesS 1711Surojit MallickNo ratings yet
- ME2309 CAD CAM Lab Manual PDFDocument39 pagesME2309 CAD CAM Lab Manual PDFAnonymous bj8F8c100% (1)
- Syllabus B.E. CSE 4th Sem JECDocument11 pagesSyllabus B.E. CSE 4th Sem JECmansha99No ratings yet
- IS 310 Software Hardware Concepts Fall 2008 Test 3Document15 pagesIS 310 Software Hardware Concepts Fall 2008 Test 3tegraGT1No ratings yet
- Sensor Warna DG ArduinoDocument7 pagesSensor Warna DG ArduinoEka KusyantoNo ratings yet
- Computer Science CS SAIL MTT ExamDocument5 pagesComputer Science CS SAIL MTT ExamsovitNo ratings yet
- Eee QBDocument257 pagesEee QBKRISHNAVINODNo ratings yet
- TIAv18IEC61850ClientBasicLibrary V102Document62 pagesTIAv18IEC61850ClientBasicLibrary V102Daniel Melo dos SantosNo ratings yet
- Lab 1Document7 pagesLab 1Tanjila Islam Ritu 1811017642No ratings yet
- Trident Technical Product Guide 2011 PDFDocument58 pagesTrident Technical Product Guide 2011 PDFFred Dibnah100% (1)
- VB Assets vs. AmazonDocument46 pagesVB Assets vs. AmazonGeekWireNo ratings yet
- Bluetooth® Low Energy Wireless Network Coprocessor: Bluenrg-2NDocument47 pagesBluetooth® Low Energy Wireless Network Coprocessor: Bluenrg-2NluongktdtNo ratings yet
- 1 - Concurrent ProgrammingDocument28 pages1 - Concurrent ProgrammingBunny HoneyNo ratings yet
- PPS Complete NotesDocument116 pagesPPS Complete NotesMOHAMMAD ANISHNo ratings yet
- The Design and Analysis of Parallel Algorithm by S.G.aklDocument415 pagesThe Design and Analysis of Parallel Algorithm by S.G.aklVikram Singh70% (10)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsFrom EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsRating: 5 out of 5 stars5/5 (3)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]From EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Rating: 5 out of 5 stars5/5 (3)
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (229)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)From EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Rating: 5 out of 5 stars5/5 (2)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsFrom EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongNo ratings yet
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- Computer Science: A Concise IntroductionFrom EverandComputer Science: A Concise IntroductionRating: 4.5 out of 5 stars4.5/5 (14)
- Raspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideFrom EverandRaspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideNo ratings yet
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XFrom EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XRating: 3 out of 5 stars3/5 (2)
- Samsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneFrom EverandSamsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneNo ratings yet
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionFrom EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionRating: 5 out of 5 stars5/5 (2)
- Essential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XFrom EverandEssential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XRating: 5 out of 5 stars5/5 (1)
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxFrom EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNo ratings yet
- The User's Directory of Computer NetworksFrom EverandThe User's Directory of Computer NetworksTracy LaqueyNo ratings yet
- Raspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesFrom EverandRaspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesNo ratings yet