You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- And Another Thing - Clarkson JeremyDocument168 pagesAnd Another Thing - Clarkson JeremyXilou GhiaNo ratings yet
- Automotive Steering Alignment ASE-A4 Suspension and SteeringDocument81 pagesAutomotive Steering Alignment ASE-A4 Suspension and Steering2791957100% (2)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Phaeton Air Suspension Design and FunctionDocument75 pagesThe Phaeton Air Suspension Design and FunctionMuraru Dan100% (1)
- Mercedes Benz E Class W211 S211 II Brochure International 200603Document113 pagesMercedes Benz E Class W211 S211 II Brochure International 200603Emanuel Theodor RaduNo ratings yet
- Automotive Sensory Systems PDFDocument381 pagesAutomotive Sensory Systems PDFAla QarqashNo ratings yet
- Semi Active SuspensionDocument48 pagesSemi Active SuspensionAjay YadavNo ratings yet
- 04 ZF Sachs Product Information PC D en EbookDocument13 pages04 ZF Sachs Product Information PC D en EbookRaja Sekaran SajjaNo ratings yet
- Electromagnetic SuspensionDocument57 pagesElectromagnetic Suspensionstar50% (2)
- Automotive Electrical & Electronic Systems - An OverviewDocument64 pagesAutomotive Electrical & Electronic Systems - An Overviewrizaazari4530No ratings yet
- Introduction To Mechatronics - Appuu Kuttan PDFDocument346 pagesIntroduction To Mechatronics - Appuu Kuttan PDFEkrem Düven50% (2)
- 2004AW Leaf VivaDocument2 pages2004AW Leaf VivaXilou GhiaNo ratings yet
- Matlab Program: FunctionDocument6 pagesMatlab Program: FunctionXilou GhiaNo ratings yet
- From Independent To Active Suspension: Press InformationDocument11 pagesFrom Independent To Active Suspension: Press InformationXilou GhiaNo ratings yet
- Matlab Program: For EndDocument3 pagesMatlab Program: For EndXilou GhiaNo ratings yet
- Lexus Is300 and Sportcross - Redefining Compact Luxury SaloonsDocument20 pagesLexus Is300 and Sportcross - Redefining Compact Luxury SaloonsXilou GhiaNo ratings yet
- The New Look Cedia With Horizontal Chrome GrillDocument16 pagesThe New Look Cedia With Horizontal Chrome GrillXilou GhiaNo ratings yet
- Toyota Innova Overdrive AdvertorialDocument6 pagesToyota Innova Overdrive AdvertorialXilou GhiaNo ratings yet
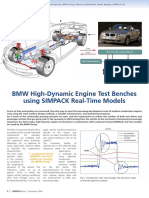
- SN 2 Nov2009 BMW-HighDyn TestBench Using SIMPACKDocument4 pagesSN 2 Nov2009 BMW-HighDyn TestBench Using SIMPACKXilou GhiaNo ratings yet
- Rubiks 4x4 Solution Guide PDFDocument12 pagesRubiks 4x4 Solution Guide PDFXilou GhiaNo ratings yet
- SafetyDocument17 pagesSafetyutkarshNo ratings yet
- Active Suspension System With Preview ControlDocument5 pagesActive Suspension System With Preview Controlrudey18No ratings yet
- B.E. Project Model Predictive Control For Electro-Hydraulic Actuated Active Suspension SystemDocument12 pagesB.E. Project Model Predictive Control For Electro-Hydraulic Actuated Active Suspension SystemVidya ShankarNo ratings yet
- JVC NatsiavasDocument26 pagesJVC NatsiavasAditya ArunNo ratings yet
- Valtra ANTS Concept Design de Um TratorDocument13 pagesValtra ANTS Concept Design de Um TratorDaniel FerrariNo ratings yet
- Lee2010 Article ActiveGeometryControlSuspensioDocument6 pagesLee2010 Article ActiveGeometryControlSuspensioShine Khant Mg MgNo ratings yet
- Suspension Control SystemsDocument39 pagesSuspension Control SystemsKRISHNAPRIYANo ratings yet
- OM - Panigale V4 S Corse - en - MY19Document359 pagesOM - Panigale V4 S Corse - en - MY19alexp50No ratings yet
- CLS Class Brochure MercedesDocument81 pagesCLS Class Brochure MercedesIbrahim Ab RasNo ratings yet
- Porsche Panamera Press KitDocument30 pagesPorsche Panamera Press Kitnicusebp100% (2)
- 1948 1430994034 PDFDocument9 pages1948 1430994034 PDFAlexander Rueda OrduzNo ratings yet
- Vehicle Active SuspensionDocument9 pagesVehicle Active SuspensionVivekDhameliya100% (1)
- ZF OVERVIEW 2010 SUSPENSION COMPONENTS and SYSTEMSDocument13 pagesZF OVERVIEW 2010 SUSPENSION COMPONENTS and SYSTEMSSitichoke SemamonNo ratings yet
- Electromagnetic DamperDocument6 pagesElectromagnetic DamperamitNo ratings yet
- Dhuaa PDFDocument8 pagesDhuaa PDFAhmadMoaazNo ratings yet
- Porsche - Int Panamera - 2011-El PDFDocument17 pagesPorsche - Int Panamera - 2011-El PDFSculatorNo ratings yet
- Auto-Syllab MTech Admission 2012-13Document25 pagesAuto-Syllab MTech Admission 2012-13Ratnakar PatilNo ratings yet
- 8040 Datasheet PDFDocument2 pages8040 Datasheet PDFrahul.yerrawarNo ratings yet
- System Operation of Adaptive Damping SuspensionDocument2 pagesSystem Operation of Adaptive Damping SuspensionAhmad SadeliNo ratings yet
- Design of Cab Suspensions and Semi-Active Seat Damping Control STDocument223 pagesDesign of Cab Suspensions and Semi-Active Seat Damping Control STjihadNo ratings yet