You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Simulation and Speed Control of Induction Motor DrivesDocument76 pagesSimulation and Speed Control of Induction Motor DrivesNWALLL67% (3)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Battery Management System For Electric Vehicle Applications PDFDocument97 pagesBattery Management System For Electric Vehicle Applications PDFGiridharNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A New Control Strategy For A Class of Multiple-Input DC-DC ConvertersDocument6 pagesA New Control Strategy For A Class of Multiple-Input DC-DC ConvertersAnonymous hzXy93FAENo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Battery Management System For Electric Vehicle ApplicationsDocument20 pagesBattery Management System For Electric Vehicle ApplicationsAnonymous hzXy93FAENo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Live With IntentionDocument14 pagesLive With IntentionAnonymous hzXy93FAENo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- CBSE Class 9 Revision WorksheetsDocument8 pagesCBSE Class 9 Revision WorksheetsAnonymous hzXy93FAENo ratings yet
- Harmonics and FilltersDocument26 pagesHarmonics and FilltersAnonymous hzXy93FAENo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Role of HVDC in Future Power Systems: by Dr.V.Rajini Professor/EEE SSN College of EnggDocument87 pagesRole of HVDC in Future Power Systems: by Dr.V.Rajini Professor/EEE SSN College of EnggAnonymous hzXy93FAENo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- AC 2009full293Document19 pagesAC 2009full293Anonymous hzXy93FAENo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- HVDC Powerflow and Equations PDFDocument9 pagesHVDC Powerflow and Equations PDFAnonymous hzXy93FAENo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Thyristor Based HVDC SystemDocument5 pagesThyristor Based HVDC SystemAnonymous hzXy93FAE0% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Av 36287293Document7 pagesAv 36287293Anonymous hzXy93FAENo ratings yet
- CemDocument95 pagesCemAnonymous hzXy93FAENo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Current-Source Converter and Cycloconverter Topologies For Industrial Medium-Voltage DrivesDocument12 pagesCurrent-Source Converter and Cycloconverter Topologies For Industrial Medium-Voltage DrivesAnonymous hzXy93FAENo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Basics of AC Drives 2Document20 pagesBasics of AC Drives 2kodandaramNo ratings yet
- Marshall Model 3210 Lead 100 MOSFET Head 1985 - Black ReverbDocument1 pageMarshall Model 3210 Lead 100 MOSFET Head 1985 - Black ReverbPatrick O'SullivanNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- GPONDocument8 pagesGPONSana QaziNo ratings yet
- What Xilinx Xc6slx45-2fgg484i FpgaDocument14 pagesWhat Xilinx Xc6slx45-2fgg484i FpgajackNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- TimeProvider 5000 IEEE 1588 Grandmaster PDFDocument2 pagesTimeProvider 5000 IEEE 1588 Grandmaster PDFahmedmidanyNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Directional Spool Valves, Direct Operated, With Solenoid ActuationDocument20 pagesDirectional Spool Valves, Direct Operated, With Solenoid ActuationSaber LeffiNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Fire and SecurityDocument28 pagesFire and Securitymurali4u35No ratings yet
- TMS320F2812-Controller Area NetworkDocument56 pagesTMS320F2812-Controller Area NetworkPantech ProLabs India Pvt LtdNo ratings yet
- 2G SA Active Alarm Dashboard 12082019 MDU UPDATEDDocument27 pages2G SA Active Alarm Dashboard 12082019 MDU UPDATEDMuthiah ManiNo ratings yet
- Pip-Ms MG PDFDocument2 pagesPip-Ms MG PDFCristian MancholaNo ratings yet
- 51 52 03 41 hc900 Io Modules Jan23Document44 pages51 52 03 41 hc900 Io Modules Jan23sarah.elfishawyNo ratings yet
- Seminar PresentationDocument23 pagesSeminar PresentationShitta Razak Olasunkanmi100% (1)
- Oferta Resigilate 2023 11 10Document15 pagesOferta Resigilate 2023 11 10olivianbarbuNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
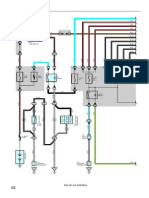
- Engine Control Celica 2000Document12 pagesEngine Control Celica 2000Giovanni Morales100% (2)
- Consolidated DataDocument28 pagesConsolidated Datavenkatesh_1829No ratings yet
- 2440 Maintenance BookDocument92 pages2440 Maintenance BookMarcel Hayon100% (1)
- Dust Free Ministick Uv PDFDocument2 pagesDust Free Ministick Uv PDFAldaír MejíaNo ratings yet
- Lord Mahavira Academy: 10+2, Affiliated To C.B.S.E, DELHIDocument46 pagesLord Mahavira Academy: 10+2, Affiliated To C.B.S.E, DELHINaman AroraNo ratings yet
- AC Motor Single PhaseDocument14 pagesAC Motor Single PhaseMohamed HAMDYNo ratings yet
- Achieve High Test Coverage For SoCDocument26 pagesAchieve High Test Coverage For SoCUmesh Parashar100% (3)
- Pauluhn Brass 500w Max Flood.Document2 pagesPauluhn Brass 500w Max Flood.dnvrusNo ratings yet
- UNIX Course Ware Ver 1Document154 pagesUNIX Course Ware Ver 1api-3699150No ratings yet
- Galil DMC-18x6Document7 pagesGalil DMC-18x6Servo2GoNo ratings yet
- You Can DIY! The F5 Power Amplifier: First WattDocument19 pagesYou Can DIY! The F5 Power Amplifier: First WattagmNo ratings yet
- Samsung ml5010 ml5015 ml4510 SM PCDocument272 pagesSamsung ml5010 ml5015 ml4510 SM PCДмитрий ЧумаковNo ratings yet
- Harmonic Filter Circuit: How To Remove Harmonics Using Active and Passive Harmonic FiltersDocument9 pagesHarmonic Filter Circuit: How To Remove Harmonics Using Active and Passive Harmonic FiltersVishesh Singh RathoreNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- TE CatalogDocument8 pagesTE CatalogforwirelessNo ratings yet
- Biomerieux BacTAlert 3D 60 - Service ManualDocument332 pagesBiomerieux BacTAlert 3D 60 - Service ManualLeandro Humbert100% (1)
- Manual QuickFieldDocument256 pagesManual QuickFieldAnonymous 4kYNmixNo ratings yet
- SM-G610F.Y Galaxy J7 PrimeDocument1 pageSM-G610F.Y Galaxy J7 PrimeSantiago Torres Henao100% (2)
- Ics Dos ManualDocument16 pagesIcs Dos ManualLuis Leonel G. C.No ratings yet