You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Jeep 1995 YJ FSM Wiring DiagramsDocument190 pagesJeep 1995 YJ FSM Wiring DiagramsRonald Moore80% (5)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Service Manual: Ventilator Software: V1.0.43 Engineering Utility: V1.0.11Document154 pagesService Manual: Ventilator Software: V1.0.43 Engineering Utility: V1.0.11Haitham Albajawi100% (3)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- RD Family Dytronic Three-Phase StandardsDocument2 pagesRD Family Dytronic Three-Phase StandardsMiko QuijanoNo ratings yet
- Smart Conveyor ControlDocument6 pagesSmart Conveyor ControllolobobolNo ratings yet
- How To Build HVOBDocument8 pagesHow To Build HVOBMichael KuangNo ratings yet
- Product Manual ELT 3000 ARTEXDocument76 pagesProduct Manual ELT 3000 ARTEXKumaraswamy RSNo ratings yet
- Supp01 e PDFDocument30 pagesSupp01 e PDFVladimir AgeevNo ratings yet
- Philips HTS3455Document53 pagesPhilips HTS3455KAZIMALI2575% (4)
- Safe Use of Power Tools Rev0Document92 pagesSafe Use of Power Tools Rev0Vaibhav Vithoba NaikNo ratings yet
- Wiser by SE - 550B1001Document2 pagesWiser by SE - 550B1001pookeNo ratings yet
- Ositrack - RFID Radio Frequency Identification Catalogue 2006.05 PDFDocument20 pagesOsitrack - RFID Radio Frequency Identification Catalogue 2006.05 PDFSarah RichardNo ratings yet
- Instruction Manual: ECT Unit Paint. No. 57800Document27 pagesInstruction Manual: ECT Unit Paint. No. 57800ANJANI AULIA DEWI mhsD4TEM2019BNo ratings yet
- Imec Service Manual en PDFDocument142 pagesImec Service Manual en PDFcarolus2009No ratings yet
- How To Build A PC DoneDocument37 pagesHow To Build A PC Doneapi-434279972No ratings yet
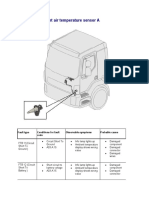
- IC-P0070, Ambient Air Temperature Sensor ADocument3 pagesIC-P0070, Ambient Air Temperature Sensor ABùi Xuân ĐứcNo ratings yet
- Felezjoo Pi - Part ListDocument8 pagesFelezjoo Pi - Part ListRani SilvaNo ratings yet
- TE20 ManualDocument56 pagesTE20 ManualwtforkNo ratings yet
- Ward Judson, Ph.D. Engineering Manager, Labs and Product Certifications Nvent 34600 Solon Road Solon, Oh 44139 Usa Tel +1.440.528.3788Document12 pagesWard Judson, Ph.D. Engineering Manager, Labs and Product Certifications Nvent 34600 Solon Road Solon, Oh 44139 Usa Tel +1.440.528.3788Muhammad FauzanNo ratings yet
- Mil PRF 83419eDocument56 pagesMil PRF 83419emglemNo ratings yet
- Mt32jf5mve MT32 5viDocument5 pagesMt32jf5mve MT32 5viIRAN FREONNo ratings yet
- Injection Pump Specification ©Document4 pagesInjection Pump Specification ©Eduardo David Castillo QuijandriaNo ratings yet
- TB Uk 449200 XXXDocument28 pagesTB Uk 449200 XXXAlonso CoradoNo ratings yet
- C200HW SeriesDocument7 pagesC200HW SeriesbagastcNo ratings yet
- 105 g10Document118 pages105 g10satvikNo ratings yet
- Electrovalva E6-E11 SeriesDocument3 pagesElectrovalva E6-E11 SeriesMonica GrecuNo ratings yet
- E175e PDFDocument88 pagesE175e PDFgoomiNo ratings yet
- Shield Flex Catalog LRDocument8 pagesShield Flex Catalog LRSanjeeb MohapatraNo ratings yet
- Testing & Maintenance ToolsDocument2 pagesTesting & Maintenance ToolsVincent PriceNo ratings yet
- Xc60 2013 WiringDocument311 pagesXc60 2013 Wiringt77No ratings yet
- Manual de Servicios Splits SamsungDocument86 pagesManual de Servicios Splits SamsungBelkys PaezNo ratings yet