USER'S GUIDE
for the
CD75- 750
VARIABLE SPEED
| DRIVES
for
STANDARD
| AC INDUCTION MOTORS
"~0,75KW to 7.5kW
|
Safety at Work
The voltages present in standard drive modul
and may be lethal
drive and the way in which itis operated and maint
spable of inlcting a severe electric shock,
Itis the responsibilty of the ownef or user to ensure that the instalation of the
ined compli
with the requirements of the
Health & Safety at Work Act in the United Kingdom and applicable lagislation and regulations and
codes of practice in the UK or elsewher
Only qualified personne! should install this equipme|
information in this Guice, The
oub! should be referred to the supplier of the equipm
Operational Safety Warning
The drive software incorporates optional auto-start an
take all necessary precautions, # operating the drive
, after first reading and understanding the
installation instructiqns should be adhered to. Any question or
restart features. Users and operators must
this mode, to prevent damage to equipment
and especially to prover: the risk of injury to personnel working on or near the motor and the driven
sqvipment.
The drive stop and start inputs should not be relied
ta safety hazard could arise from the unexpect
‘mechanism should be provided to prevent the motor ft
The manufacturer accepts no lability for any conse:
+ incorrect installation or adjustment of the optional
trom mismatching ofthe drive to the motor,
‘Tho contents of this Gude are believed to be corre
‘commitment to a policy of continuous development
‘he right to change the specification of the product ot
Guide without notice.
Al rights reserved. No part of this book may be repr
‘means, electronic or mechanical including photoco
pvt
oF retrieval systom without permission from the publi
Copyright © 1998 Control Te
Part No. 0412-0008
(CD75.750 Issue 3
September 1898
‘SOFTWARE VERSION
alone to ensure the safety of personnel
starting of the drive, a further interlock
‘unning except when its sate to do so.
Nees resulting from inappropriate, negligent
‘Operating parameters of the equipment, or
atthe time of printing. In the interests of a
id improvement, the manufacturer reserves
Is performance or the contents of the User's
Jucad or transmitted in any form or by any
19, Tacording, or by any information storage
in wen.
niques Drives Lid
USER'S GUIDE
for the
CD75-750
Variable Speed Drives
for
STANDARD AC INDUCTION MOTORS
0175 to 7.5kW
Bisa ioes ate ema
|
contTROLFECHMIO
WorLpwine
CONTROL TECHNIQUES DRIVES LTD
79 MOCHDRE INDUSTRIAL ESTATE
NEWTOWN, POWYS SY16 4LE
DECLARATION OF CONFORMITY
Dinverter | Power range 0.37kW
Commander CD2 Power range 0.75kW-7.5kW.
Commander CD Power range 11kW-75kW
Commander CDV Power range 11kW-90kW
Commander CDEPower range [TKW-90kW |
Vector Power range 1kW-75W
The above listed A variable speed drive ploducts, have been designed and manufactured in
accordance with the following European harmonised, national and international standards:
EN60249 Base materials for printed circults
1EC326-1 Printed boards: General information for the specification writer
1EC326-5 Printed boards: Specification for single and double sided printed boards with plated
through holes
1EC326-6 Printed boards: Specification for multilayer printed boards
1EC664-1 Insulation eo-ordination for equipment within low-voltage systems: Principles,
requirements and tests |
EN60529 Degrees of protection provided by enclosures (IP code)
UL9a Flanmability rating of plastic materials
ULSO8 Staxdard for Industrial Control Equipment
These products comply with the Low Voltage Directive 73/23/EEC and the CE Marking Directive
9B/68/EEC
W. Drury Newtown
Technical Director Date: 26th September 1996
Nowe
‘This electronic drive product is intended to be ised with an appropriate motor, controller, electrical
protection components and other equipment to fijrm a complete end product or system. It must only be
installed by a professional assembler who is fanfiliar with requirements for safety and electromagnetic
compatibility ("EMC"). The assembler is responsible for ensuring that the end product or system
‘complies with all the relevant laws in the country where itis to be used. Refer to the product manual or
EMC data sheet for further information on EMC standards complied with by the product, and
uidelines for installation,
kK WWong Revd
16/9°96 Issue A
Addendum 6
Part No. of addendum: 0512-0000
Issue code: C2NU2
Issue No: 2
Date of issue: February 1995,
Software version: v3-3-x
Eemc Connections
Power supply requirements
‘An additional transient voltage suppressor {variston is fitted between power terminals Eerc and PE as
shown in Figure 1. The varistor connection permits the use of power supply configurations where the
maximum line-to-ground (earth) voltage exceeds 320Vac. For example, this is possibie in a 480V
{grounded-detta supply (Figure 2) where one phase is grounded, and the line-to-ground voltage is equal to
the line voltage. The maximum line-to-grdund voltage must net exceed 528VAc (480V +10%).
the line-to-ground voltage is less than 320VAc for example in a grounded star (Y) configuration
(Figure 3), the varistor between Eare and RE may be removed and replaced by a jumper. This brings
into circuit the integral RFI fiter. It is recommended that the filter is used in most applications because it
provides an effective reduction in RFI emigsions into the Ac power supply.
Figure 1 Power terminals with vatistor connected between Eeuc and PE
Mo <828VAC
Figure 2 Drive connected to a grounded-delta AC supply
na oer sm
Figure 3 _ Drive connected to a groundet
The following guidelines must be observed
‘The PE connection must always be connectet
‘The Ese Connection must be connected to Pl
d-star AC supply
1d 10 ground (power earth)
E only when it is known that the line-to-ground voltage is.
less than 320VAc (in a grounded-star configuration, for example)
if there is any doubt over the type of ac supply configuration, do not remove the varistor. The drive is
protected from line-to-ground voltage transiet
I an application requires the integral RFI fit
‘grounded-star, an :solation transformer with
The alternative to using an isolation transforr}
RFI filter rated for the line and line-to-ground|
Motor thermistor protecti
‘The drive has been supplied with link PLS in
a
nrigre Te, page #0), Aaja nk oy
of the drive
nts by this component.
to be used, and the power supply configuration is not
‘grounded-star secondary is required.
er for grounded-delta Ac supplies is to use an external
lvottages.
ion
isabled position (not in the enabled position as shown
n'a motor thermistor is connected to control terminal 9
Since short-circuit thermistor protection is now disabled, the drive will not trip if a short-circuit appears
etween OV and control terminal 9.
Auto reset
There is no auto reset when an Et fault trip occ#rs.
Serial communications Hroadcast
When a number of drives are linked to a serial
broadcast facility allows all drives to respond to|
mmunications network, the serial communications
ne command simultaneously.
This parameter operates regardless of the comipunication address set in parameter Pr9 of the drive.
To invoke the broadcast mode, specify address}
Note
‘Since user address 0 is used to invoke broadca|
the controlling station. The use of address 0 st
t mode, a drive having Pr 9 = 0 will not transmit data to
Juld be reserved for broadcast mode only.
New parameters
‘The following new parameters reside in the Pr d menu,
b21, b23 — Preset ramp selector
Using a combination of settings for bit parameters b21 and b23, the following can be achieved
‘The drive can use its own preset speed acceleration and deceleration ramps.
Terminals A10, A11 and A12 can be configured as ramp select inputs.
°
Default settings: b21 = 0, b2:
Presel speeds use the acceleration and deceleration ramps of Pr 2 and Pr 3.
b2t=1
b23=0
Preset speeds use their own acceleration and deceleration ramps.
Pr 20 preset uses acceleration ramp Pr30 and deceleration ramp Pré0.
Pr21 preset uses acceleration ramp Pr31 and deceleration ramp Prd
ete.
Terminals A10, 11 and A12 can be configured as digital inputs to select pre-programmed ramp times.
‘The following table shows the terminals that correspond with the parameters.
b20=0
3 preset speeds and jog
an] _Aw Ramps.
° | 0 P23
Enon aE Parad
° Paupar
zB alain Paap
Note
Jog input A12! operates as normal
ds
at an a10 Ramps
° ° ° Praprs |
o = 1 Pro0Pr a)
eo | 4 ° Pr Strat
ot, 4 1 Prazir a2
1 | ° ravers |
1 ° 1 erawpres
1 1 ° PSST a5
1 ee Prowpras |
Note
When a combination of terminals are grounded, the associated ramp time become active
Immediately, even wnile 2 ramp is in progress. These ramps will also apply to all analogue inputs
and serial communications.
3
A asc ANG ha ea
baa) :
Piece! speeds ute thei own ramp times (same as b21 = 1, b23 = 0)
b24 — Load output
Default setting 24 = 0
b24=0
Terminal 18 is a standard load output
24
1
Terminal 19 becomes 2 digital output in the form of a load-reached output, where the output changes
state trom OV to +10V. when the drive load is equal to or greater than the value set in Pro.
b25
Default setting’ p25 = 0
This parameter is currently not used
b26 — Mains ride-through and phase-loss disable
Default setting: b26 = 0
b26= 0
[ACUU mains nde-thrsugh and phase-loss capability work as normal
b26=4
ACUU mains ride-through and phase-loss capability are disabled. The dynamic braking voltage is now
set to a fixed value of 735VDC.
b27 - Normal-running ramp selector
627 selects the braking mode ramp during normal running when the input speed reference is reduced.
Default setting: b27 = 0
bar =0
Uses the standard ramp braking mode when the input speed reference is reduced when either coast-to-
halt or DC injection braking are selected.
ba7=4
Uses the high-(evel ramp braking mode when the input speed reference is reduced for all stopping
modes,
Related parameters: b2, b7, Pr 8
ear Ramp mode
soncard
‘Standard
“wanders
high eve
gneve
Tigh eve
gh eve
igh level
b28 - PI control selector
28 is used to select PI contro! when the feedback from a transducer, etc, is used to control the speed of
the motor.
Default setting: 928 = 0
b2s=0
Pl mode disabled
bas =4
P| mode enabled
Serial mnemonic: Pl
Related parameters: Pr 20, Pr 21, bt1
When PI mode \s enabled, Pr 20 and Pr 21 are used as the P and | gain parameters instead of preset
speeds.
Pr20 — Proportional gain factor
P 120 = P gain (Kp)
Default setting: 0
Range: 0 to 24.0
‘The Proportional gain factor Kp is a multiplication factor applied to the speed error signal in order to
produce the correction term
Kp factor
(Pr 20/Pr 1) x 75] x error (H2)} in Hz
Increasing the value of Kp increases the system damping and the transient speed response. If the value
is made too high for a given load, the system will become unstable, The optimum setting is the highest
value possible before instability starts to occur. Optimum performance is achieved by setting the best
combination of P and | gains,
Pr21 — Integral gain factor
Prat
gain (Kk)
Default setting: (
Range: 0 to 25.5
The Integral gain factor Kp is a multiplication factor applied to the speed error signal in order to produce
the correction term
Ki factor = {{(Pr21/Prt) x 2.25] x error (Hz)} in Hz/second.
The Ki term ensures zero speed error during steady-state load conditions. Increasing the value
increases the rate of recovery after a disturbance. if the value of Ki is made too high, speed tends to
oscillate instead of settling quickly. The optimum setting is the highest value before oscillation starts to
‘occur. Optimum performance is achieved by setting the best combination of P and gains.
Transducer feedback
‘The feedback from the transducer is applied to the remote-speed current input, terminal 8, The form of
the input can be configured by bit
PI control using serial communications
to enable PI control using serial communications for drive 15 for example,
send the following message
GONTROL [ADORESS [conTRoL _[MNEM [DATA [CONTROL _/8CC
cor vss | sx pr | so | Ex
(smo | Ley cure 4
BCC eaiulated [
‘To disable PI control using serial communications for drive 15 for example,
send the following message
TonTROL | ADDRESS | conTROL | MNEM| DATA CONTROL | BCC
e0T 1155; Tx er | 700) em 3
(cr-D) [ots cue
Reading data using serial communications
To read the status of tne Pl control parameter using serial communications,
send the following message.
‘CONTROL ‘ADDRESS: i MNEM ‘CONTROL
eoT T 1155 Pr ENG.
co) l (one)
When Pi control is enabled, the drive will respond as follows:
CONTROL TNE pata [commmor | 606
srk D — ex
cue | gre |
[ BCC calculated
When PI control is disabled, the drive will respond as follows:
CONTROL vem [pata | contr | 8ce
‘STX | Pr 00 | em $
one [cue
[ [ 36 cased
Pl control
‘To select the Pl control software, set b28 at 1. Also connect terminal 16 to OV to select remote control
‘The Pl software can be used to regulate the speed of a motor in applications where a constant pressure
or air flow, etc, needs to be maintained
Set the drive frequency by applying a Local speed input signal to terminal 5.
‘Apply the feedback from the transducer to the remote speed input, terminal 8, The transducer output
‘must be in one of the following current-loop formats:
440 20mA,
20 to 4ma
Oto 20m
Set b11 for the appropriate format
(A voltage signe! from a transducer must be converted and scaled into the appropriate current-loop
signal )
Setting up PI control
‘To achieve optimum performance from the PI contol, the following set up procedure should be followed
+ Connect an uscilloscope to the feedback input, terminal 8
2 Set the drive frequency at a value which gives the nominal pressure or air flow etc, from the system
3. Increase the value of Pr20. At the same time, monitor the trace on the oscilloscope. When the trace
becomes unstable, decrease the value of Pr 20 slightly,
4 Increase the value of Pr21. At the same time, monitor the trace on the oscilloscope. When the trace
becomes unstable, decrease the value of Pr 20 slightly
5 Stop the drive. Monitor the trace on the oscilloscope and re-start the drive. When optimum
performance is achieved, the trace should be as shown in Figure 4
6 Achieve optimum performance by setting the best combination of P and I gains.
Figure 4 Ideal response curve under PI control
b55 — AC power loss ramps
1356 can be used to select the acceleration and deceleration ramps which are followed by the drive during
‘oss and restoration of Ac power
Default setting: b55 = 0
85 =
nen ac power is ost, the ramp times are controlled by Pr2 and Prd or, if selected, the required preset
acceleration or deceleration rates.
bss
Wen ac power s 1st, the deceleration ramp is controlled by Pr46, When Ac power is restored, the
acceleration ramp is controlled by Pr36,
b56 — Ramp selector for non-important trips
556 is used to Ramp to halt when a non-important trip occurs,
Default setting: D56 = 0
bs6 = 0
Non-important tips are treated 8s normal trips.
ps6
1
Ramp to halt for non
important trips.
The non-important trips are as follows
Et eL On th
“These trips cause the drive to ramp to @ halt with a deceleration rate that is determined by the drive
setup
When the drive is operated under terminal control, the display shows a steady (not flashing) tip code
wii the drive reacties OHz. The IGBT output stage is disabled and the display flashes the tnp code,
san a “he status relay immediately de-energises when the drive receives the trip and starts to arp 10
ae The tip can be feset at any time. If it occurs during the ramp stage, the drive will ramp back t0
the set frequency
When the drive is uperated under keypad control, the display indicates the trip condition during he am1P
age by allerating between the set speed value and the rip code. Ifthe trip is reset, he dive will not
soe ey to the set speed. It will continue to ramp down to OH2.. The cisplay will show rd¥ alternating
with the set speed value.
Serial control of new parameters
Serial contro! of new bit parameters b23 to b27, b5S and bS6 is possible. The bits are resident in the C1
Configuration word. The order of the bits is as follows:
Sedcharacter__ | ___ Default
ba 2
ba °
bas 2 7
B25 L °
‘ath character Defaut
Bs o
ba 0
bss onemEee |
26 2
Control Keypad
The removable control keypad can now be unclipped from the front ofthe drive, allowing access to the
jumpers. Drives from serial number 370000 have this addition,
Enhanced frequency resolution
using high resolution ASIC
‘The CD drive allows the motor speed to be controlled using either an analog reference, the keypad or the
serial conununications link (SP command). This gives the following drive frequency resolutions:
‘Output frequency ] Resolution ULF,
He He He
rd on 120
O10 241 oz 20
O10 Oa 80
010 96 08, 60
Drives fitted with the new high resolution ASIC (from serial number 355000). allow the output frequency
to be set to a higher resolution using the serial communications link. The new command to allow the
control is HR and permits 0.001Hz frequency resolution, The resolution depends on the set value of ULF.
‘Output reaueney Resolution ULF
He He He
O12 0.008 120
O10 240 ‘008 20
010.48 0.002 0
rr 0.004 360
‘The HR command appears between RC and TO in the mnemonic sequence. The serial protocol for HR
increases the rumberiof data characters to eight. All other commands used in the drive remain at six
characters,
we " 7
The following are the protocol formats for the new command,
Sending da
ta
Send the following string,
ZonTROL | ADDRESS | CONTROL [wnEW] DATA | conTROL | Ecc
cn _| one cure
30 cae
Reading data
Send the following string
CONTROL ADDRESS mew |__e0NTROL
EoT rr HR leerenc
eno out
Response string
‘CONTROL | MNEM DATA CONTROL Bcc,
xR “per 001 em 3
one coe
[ BGG coated
Long-cable driving capability
For cable sizes refer to Fuse and Cable Data on page 4-6 of the User Guide
Dive Water abe
~ ‘Standard 4 core ‘Armoured
Maxima tng rete) axirur ent metres)
cocov | winoutchoke | with choke | Without choke | _ with choke
75 & 110 = 70
io A 170 © io
| 150 125 220 110 180
0. 180 310 160 0
<0 ao 0 130 zo
Die cate
i ‘Armoured
Maxima egy etre) asimurtength retres)
witout ene
cocov | Cablesize ‘Cable size, Cable size
Zen 28mm oem
‘aawe ‘anne feawe
= 250 15 720
760 155 16 ze
ome Motor able
Siandard 4 core "mowed
Maximum length et Maximum ong (et)
cocov | Without choke ‘With choke ‘Without choke ‘with choke
7 15 0 15 0
710 260 555 195, 360
70 10 7 20 500
ze a0 75 Es eo
[eeetaca] 7018 1310 500, L772
10
Drive | ‘Motor cable
Standard 4 core ‘armoured
Aaximurn length eet) ‘Maximum length (fet)
L without choke without choke
corcov Cabiesize | Cablesize | Cablesue | Cablesize
25 0m ‘0mm 25mm ‘40mm
Ee 7s | 880
750 505 7 5] 720
Important Notes
Cable lengths are based on a drive overload (torque) capability of 125% for CD and 120% for CDV.
Cable lengths given in the tables are typical. Operating beyond these lengths may cause the drive to
trip on overcurrent (Ol), or fold-back in frequency,
‘Motor line-chokes will allow longer cables to be driven by CD75-400. Use 2mH per phase, connected at
the drive end, Select the lowest PWM switching frequency to minimise heat dissipation in the choke and
reduce radio frequency emissions.
‘The effect of cable voltage-drop becomes increasingly significant for drives above CD40. The use of
‘chokes is not normally necessary
Use a drive of higher rating if longer cables or a greater overload capability is needed. Driving very long
cables (as a guide: greater than 200 metres armoured, greater than 360 metres standard 4 core) and
tusing motor line chokes may cause the DC bus voltage to increase slightly at low output frequencies.
‘This may be overcome by connecting a small capacitor between DC-VE and drive power earth, Consult
the supplier of the drive for guidance.
1
CD75-750
CONTENTS
Features of CD75-750 Drives
1 Theory of Inverter Drives
2 Specification & Data
Currant & Volage Ratings
Specifications
Encoder Specification
Electromagnetic Compatibility
Drive Module Weights
3. Installation —- Mechanical
Drive Mourting — General Requirements
Front- and Through-Panel Mounting,
Control Pos Mounting
Cooling & Ventilation
4 Installation — Electrical
Installation Safety
Power Connections.
Control Connections
Other Contiguration Detaits
Connecting Serial Communications
5 Operating Procedures
Safety
Setting Up to Run
Keypad & Display
Modes of Operation
6 Drive Configuration Parameters
Parameters & their Functions
Operating Parameters
Bit Parameters
Parameter Quick Reference & Setting Record
7 Diagnostics & Fautt Finding
Fault Finding 72
Control Pod Trip Codes 73
Healthy Indications 14
8 Serial Communications at
Introduction rey
Fundamentals 23
‘Components of Messages. 86
Structure of Messages a6
Configuring the Drive through Serial Communications. 810
9 Braking Unt (Optional) ot
Introduction 33
Principles of Operation 93
Braking Usit Spactication a4
Extemal Braking Resistor Sizing 26
Electrical installation 98
‘Mechanical installation att
Operating Procedures 941
Diagnostics — Problem Solving 942
10 Electromagnetic Compatibility (EMC) 104
Introduction 103
Immunity . 103
The Nature of Drive Emissions 103
Immunity of Senstve Circuits 105
Precautions lor Drive Installations 106
‘Additional Precautions of Sensitive Circuts 106
Optional RFI Fiter 10-10
Installing the Optional RFI Fier 10-10
Earth Leakage Current to
Control Techniques Worldwide MW
pasa avin Se i a
CD75-750
ILLUSTRATIONS
Page
1 Locations of principal components o2
2 Schematic block diagram of the power system 03
3 deal voltagortrequency ratio 13
‘4 Typical luvfrequency relationship 13
5 Volage boost to increase low-speed torque 13
6 Locations of principal components 32
7 Overall and mounting dimensions. ae
8 Procedure for removing the rear case 36
8 Procedure for removing the control pod 36
10 Dimensions for remote mounting of the control pod 37
11. Minimum clearances for ventilation ofthe drive 38
12 Typical enclosure, cooling surfaces 39
43 Locations of principal components 44
14 Power terminals, standard connections 45
15 Control terminals and typical external circuits 48
416 Locations of components on pb INSO 410
17 Mutidrop links, FS485, and typical serial addresses 412
18 Serial ink connections, RS485 and RS422 412
19 Serial link connections, RS232 412
20 Power terminals, standard connections 53
21. Minimum external control connections 54
22 Control Pod 56
23 Display features 58
24 Structure of Prd menus, and access procedure 5:10
25 Roceleration time Pr2 6s
28 Deceleration time Pr3 6s
27 Overcurrent protection 67
28 xt characteristics, selected by Pr5 67
29 Voltage (torque) boost Pré 68
30 Slip compensation PrT 69
31 Injection braking Pre 6-10
32 VA profile and Pre 612
33 Skip frequency control, Pri0 - 15 613
34 Application of presat speeds, Pr20 - 26, Pr30 - 36, Pr40 - 46, 615
35 Fixed and dynamic Vf, 54 6-26
36 Multidrop links, RS485, and typical serial addresses, a2
37 Serial link connections, RS485 and RS422 a2
38 Serial ink connections, RS232 82
38 Optional braking unit, dimensions 97
40° Braking system, schematic diagram 98
‘41 Braking system, connection for internal resistor a9
42._Braking system, connection for external resistor 9-10
43. RF currant paths, no special precautions 10-4
44 Wiring and layout, non-sensitive systems 107
45. Wiring and layout, sensitive systems 107
46 Current paths with supply fiter and screened motor cable 109
47 Procedute for installing the RFI fier internally 10-12, -13, 14
Logie Diagrams
5.41 Speed referonce 514
542 Torque reference 515
S43 Reversing 518,
5.44 ' Starting S16
545 Stopping 516
548 Reset 517
say Trip 518
54.8 Speed loop 519
5.49 Acceleration 5-20
5.410 Deceleration 5-20
5.411 Voltage loop 821
5.A12 DC link voltage contro! 822
5.413 Digital outputs 522
5.4.14 Serial Communications 522
on pigseant i i
tem sense aii sc vow open wnedlataaalaaaiaas
CD75-750
Features of CD75-750
on
CD75-750
FEATURES
of the
CD75-750 Drives
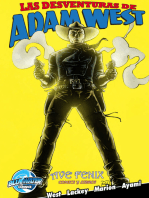
1. Locations of principal components,
|
CD75-750
+ Full digtal control.
+ Complete digital adjustment of drive parameters. + 150% (industrial) and 120% (HVAC) trating torque.
+ Insulated gate bipolar transistor (IGBT) output * OC injection braking
bridge for high speed switching and low power Removable control pod for addtional secur
consumption. + Fully-isolated RS485 serial communications
+ Motor speed digtally-contralled from OH to 960Hz intertace.
* Choice of up to four switching frequencies in the + ltegral RFfiter as standard
range 24H to 11.7KH2. + Supply-phase. loss protection and mains
+ Fixed and atematively variable VA characteristic. siscontnuty ride-through
+ Internal monitoring and protection includes Ixt_ * Programmable preseting of speeds and jog.
curr k current limit, + Programmable skip frequencies.
instantaneous overcurrent and individual GBT + Selectable avto-restar aftr tip.
Protec bet ana + Mountings for frontof-pane o through-hole
+ Complete isolation between control and power. Aumrioeuing of faut events
fctronie circuite, Impedance isolation for ac, Aut2-9Ging of fauk events deta,
Efficient thermal management, derating not
required.
‘+ Slip compensation.
supply and dc ink voltage feedback
+ Ability to start the drive when the motor ie spinning,
in ether dtecton, without large vansiant torques.
‘Control Pod
CONTROL PCB INSO
Ssaennsiamsesreomceeesanatin
_prcenansceansoemnnnsnenisa
f
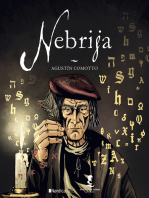
[ PowER pcs
|| INS2— C75, cot10
“| INS3— C400
|| INS4 — C560 - C0750
Integral
RFI iter}
(Bult In)
DC Link Choke
E
\ cca eanescnsooara
st
Neem
2. Schematic block diagram of the power system. al
og
075-750
Base speed
Dc tink
Defaut
Hvac
MVF
GLOSSARY of TERMS
The shaft speed of an PLC
induction motor when supplied
at rated vokage and frequency.
(DC bus’) The de voltage
‘source connecting the input
‘rectifier to the output inverter. Power factor
A single pre-determined value
to which a parameter is set
during manutacture.
Reduce the nominal rating of | PWM
apparatus because of
departure from specified
‘operating condtions.
‘The cosine of the phase angle
between fundamental voltage ULF
and fundamertal current
Full oad current.
Full lad torque.
Heating, ventilating and air-
conditioning.
Maximum Voltage Frequency
(@f a CO drive): the frequency
selected to be delivered to
motor when the output vokage
is equal to the rated input
voltage (= Pre}.
Programmable logic controller.
Equipment designed to
manipulate and
transmit data for controlling
‘other equipment.
(apparent power is rms voltage
x me currant).
Pulse width modulation. A
technique for synthesizing a
‘waveform by making individual
pulses in a pulse train diferent
widths.
Upper limit frequency. The
highest motor ouput frequency
of the drive, (Actual maximum
frequency can be lower than
this as set by Pr).
CD75-750
1 Theory of Inverter Drives
CD75-750
42
Theory of Inverter Drives
Induction Motor Characteristics
Standard industrial squirrel cage induction motors are wound to match the supply votage and
‘requancy which prevails in the country where they will be used or are manutactured. When itis
desired to operate an induction motor at variable speeds, it is necessary to consider the effect of
voltage and frequency on fx and torque.
‘An induction motor depends for its operation on the rotating field created by the balanced three-phase
currants in the stator (field) winding. The magnitude of the field is controlled not by the stength of the
current, but by the voltage impressed on the field windings by the supply. This is because
resistance of the field windings resus in only a small voltage drop, even at full load current, and
therefore the supply voltage must be balanced by the emf induced by the rotating field. This emt
sdopends on the product of three factors:
the total fx per pole,
the total number of turns per phase of the field winding,
and the rate of field rotation.
‘The emf can be expressed as E = kgNf a
whore E is the induced emt,
9s the total flux per pole,
Nis the number of tuns per pole,
{is the frequency,
and kis @constant.
I the applied voltage is increased, the emf must increase to balance, and if the frequency is held
‘constant the flux per pole must increase also, since the number of turns per pole is fixed.
For economy of material, the magnetic circuits of standard motors are designed to operate every close
to saturation at rated voltage and frequency. This is the optimum condition for the production of
maximum torque. At rated frequency, any further increase of voltage cannot increase torque but will
‘cause current, and consequently losses, to rise.
For optimum acceleration, of rapid response to an increase in load torque, @ should be maximum to
‘maximise the torque, as the designer intended.
Equation (1) can be restated as —
1, )
ww * 4
‘This shows that, since Nis fixed and k is constant, a near relationship must be maintained between
‘mt (and consequent the applied voltage) and frequency, if ux isto remain constant at diferent
speeds. This linear relationship is known as ‘constant Vit (or Viz). Drives possessing this essential
feature are usually called ‘variable voltage variable frequency’ (vwvf) drives. The speed of a motor at
{ull rated voltage and normal VA ratio is called its ‘base speed’, expressed in Hz or rpm as convenient.
[Although constant Vi control is an important underying principle, departures from i enable the speed
range to be extended both above and below the base speed. Operation of the motor at speeds above
its base speed is achieved by increasing the output frequency of the inverter above the rated
frequency while the applied vohage remains at maximum value.
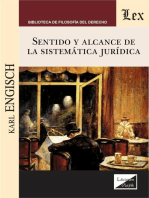
‘The VA characteristic is typically as shown in Fig.3, which also shows the change above base speed.
Since V is constant above base speed, the flux falls as the frequency increases, Fig. 4, in direct
ORNS 2: ALN ek RE RNE NS. es
‘Typical mains ‘Base
aol speed
pical mains
Ppl frequency)
3. Variable motor sf voltage
to-froquency (VA or Vitiz) characteristic.
Constant
° ‘power —e
Base speed’ —1 502 typical
4 ariable motor speed — pial faxto-
equency rian
F Sore f
5 \otage boost to increase torque at
low ftequencias. (Nott teas)”
Equipoed with suitable control tunctir
from zero to input line voltage, over a
PWMIGET
quency range from zero to some practical maximum
mesos amesni
CD75-750
proportion to the VA ratio. The ability of the
‘motor to produce torque is correspondingly
teduced, and in fact the power output remains
constant.
The second operating condition where
departure from a constant VA ratio is beneficial
is at low spoeds, where the voltage drop arising
from stator resistance becomes significantly
large. This voltage drop is at the expense of the
flux. As the applied frequency approaches zero,
the optimum voltage becomes equal to th
stator IR drop. To maintain a constant flux in
the motor at low speeds the voltage must be
increased to compensate for the stator-
resistance effect. Compensation for stator
resistance is called ‘voltage boost’, Fig. 5, and
most drives offer some form of adjustment so
‘that the degree of boost can be matched to the
winding resistance. Wis also normal to taper the
bboost to zero as the frequency increases. A
refinement is to increase the degree of voltage
boost fer loads that impose a high starting
torque, since the IR drop will be greater
because of the increased current. Automatic
toad-depandent control of the voltage boost in
this manner has practical advantages for many
‘applications.
Drive Configuration
To operate an induction motor successfully in all
varieties of industrial applications a drive must
at least be capable of varying both voage and
frequency, for which it is necessary to separate
the input from the output. This is most
Conveniently done by rectitying the supply and
inverting the de output. Variable output votage
ccan be obtained by varying the de link vokage
‘and maintaining the gain of the inverter constant
+ The gain is the ratio of ac output to de input.
Alternatively, the de link voltage can be
Uncontrolled and the gain varied. This latter
method is usually achieved by pulse-width
‘modulation (PWM) control of the inverter.
‘The use of a mathematically-advanced PWM
switching strategy to control the latest high
power high speed semiconductor switching
devices — insulated gate bipolar transistors
(IGBT) — in the power output bridge enables
the output waveform to be closely approximated
‘to a pure sine wave, The de input vokage can
then be derived from a simple diode bridge
rectifier which, besides being highly reliable,
also has the advantage of reducing the
amplitude of harmonics seen on the input of the
inverter.
ter is capable of providing any voltage
Considerably above the rated frequency of standard squire cage motors. The contol function is also
capable of enabiing the voltage to be raised at low frequencies to increase torque at low speeds, and t
is relatively simple to arrange that the phase sequence of the output can be changed to enable the
13
075-750
‘motor to reverse. These functions are the basic minimum and they can, with a suitable control system,
‘be considerably extended.
Digital control logic is essential to gain the full advantage of a PWM switching strategy applied to the
1GBT output bridge. The speed and adaptabilty of digital logic makes it feasible to extend the scope
of the control functions in two important directions. One is to equip the dive to monitor and protect
ltsell and the motor; the other is to enable the performance of the drive and motor to be refined to take
‘account of the widest possible variety of applications.
‘A Iurther advantage of digital control isthe precision with which operating parameters can be adjusted,
and maintained without driting from set values. A standard interface
‘extemal analogue signals into the control scheme, and also to provide analogue signal outputs.
Finally, digital control makes communication with other digital devices simple to implement and
‘operate through industrial standard serial communication links,
MM
sti estes |
075-750 SPECIFICATIONS
2 Specifications & Data
2.1 Current & Voltage Ratings
2.2. Specifications
2.3. Encoder Specification
2.4 Electromagnetic Compatibility (EMC)
2.5 Drive Module Weights
24
SPECIFICATIONS CD75-750
2
Specifications and Data
2.1 Current and Voltage Ratings
“The CD75-750 (0.75.7 5KW) range is rated for Curent outpt, thus fora fixed maximum current oupes the
power ouput is dependent on the value ofthe supply voltage inthe range SEDV 400V.
Power Supply
Input supply Voltage range, and Frequency —
380V to 480V ac #10% 6OHz #2Hz
‘380V to 440V ac #10% SOH2 422
Minimum supply source impedance —
Zoro Ohms.
‘Maximum supply imbalance —
‘2% nagative phase sequence (equivalent to 3% phase voltage imbalance)
CD75-750 (0.75 -7-5kW) Industrial Inverter, 380V Supply
DRIVE ourpuT ‘MOTOR INPUT
‘MODULE RATINGS
ox | 160m 100% 00%
us | rus rus FUNDAMENTAL
‘CURRENT | CURRENT] | cunRENr ‘CURRENT
o @ |
A A_|ewonp| aA wa | A ew,
cos 21 | 32 [ov 19 | sa 36 | 18) 12
como 28 | 42 | 11 15] 59 38 | 24 16]
epso 638 | 57 | 15 20| ss as | a3 22
cozo sé | a4 | 22 30) 71 47 | 49 32
coo 95 | 143 | 40 53/ 95 63 | a3 55
cosso 6120 | 180 | ss 73| 1397 90 | 104 69
corso 160 | 260 | 75 100] 163 107 | 199 92
NOTES (1) RMS curent required by a3-phase, 6-pole motor to produce rated ouput
shaft power. 100% FMS current is available at all switching frequencies
without derating, up to a maximum ambient temperature of 50°C,
@) Maximum inverter RMS curent.
22
hati.
CD75-750 SPECIFICATIONS
(CD75-750 (0.75 -7.5kW) HVAC Inverter, 380V Supply
-
pave_| output | MOTOR INPUT
MODULE |_ RATINGS
tome | 1am | 00% 10%
pws | As mus FUNDAMENTAL
EURRENT | CURRENT ccunrent ‘CURRENT
(rong
A ate on] awa | a kw
eovs | 21 | 25 jo 10| 54 36 | 18 12
covito | 28 | 34 | 11 18 | 59 38 | 24 16
coviso| ae | 46 1s 20] ss a5 | a3 22
covezo | s6 | 67 |22 30] 71 47 | 49 92
covaoo | 95 | 114 | 40 53] 95 63 | 83 55
covsso | 120 | 4 | 55 73] 197 90 | 04 69
covrso | 160 | 192 | 75 100] 163 107 | 139 92
Losses
DRIVE. | FREQUENCY | POWER ‘CONTROL ToTaL |
MODULE |
Hz w w w |
cps | 2fkHr 2 30 72
corto Sox 52 30 eofaaaa |
8.8kHz 62 30 92 |
11.72 R 30 102
co1s0 2.9kHz 82 35 417 |
+ ope20 5.9kHz 97 35 we |
8.8kHz n2 35 |
17ie 127 35 162 4
2.9kHz 135 35, 170
Some | 180 oe ee ie
B.8kHz 185 35, 220
17a 218 38 250
cos50 2ortz | 251 35 286
*¢D750 S.9kHz an 35 348
8.8kHz 368 3 aot
[riz 421 3 | as
* C220 to ©0750 are fan cooled
28
SPECIFICATIONS CD75-750
2.2 Specifications
Accuracy
Frequency —
Accuracy + 0.01%, fll scale,
NOTE — This figure implies —
(Crystal-controlied intemal reference
Attitude :
Faated up to 1000m above sea level. In excess of 1000m above sea level derate FLC by 1%/100m to
‘a maximum atttude of 400m above sea level.
RELEVANT SPECIFICATION — IEG 146-2, Section 3.1.2.
Ambient Temperature and Humidity
Fated ambient temperature -10°C to +50°C
Maximum storage ambient temperature: -40°C to +50°C for one year maximum,
Humidity — Non condensing at any temperature.
Environmental Protection
Ingress protection IP10,
Materials,
Al plastics have flammability rating UL84 VO.
Starts Per Hour
Drive limited to 10 starts per hour if started by switching the supply. lf the motor is started only by
‘lactronic control ofthe drive, the number of starts per hour is unlimited by the drive.
PWM Switching Frequencies
Constant switching frequencies selectable from four values —
29k, 5.9kHz, 8.8kHz oF 11.7kHz.
Vibration
Tested to a level of 1g (rms) in the frequency range SHz to 150H2 in accordance with IEC 68-2-34.
Inverter Output
The three phase balanced output can be adjusted to either 120H2, 240Hz, 480Hz or 960H2 maximum
frequency.
NOTE
(1) With a switching frequency = 2.9kH2, ULF = 120/240Hz only are possi
(2) 960H2 ULF is only available with a switching frequency of 11.7KH2.
Maximum output voltage is normally equal to the input vokage. Current maximum = 150% of drive
FClindustrial CD drives) and 120% for drive FLC ((HVAC CDV drives).
Resolution
When parameters are set from the keypad or serial communications link, resolution is 0.1 unit excopt
forthe following -
Value > 100 units: + 1.0 unit, keypad mode
‘Acceleration & deceleration rates: resolution becomes coarser towards 600 seconds,
PrO, Pri, Pr7: 0.2H2 for ULF = 240H2.
0.4H2 for ULF = 480Hz.
Pri0, Pr20, Pr20-Pr27:_0.8Hz for ULF = 960HZ.
Pre: 0.4%
Display resolution 0.1Hz.
a4
CD75-750 SPECIFICATIONS
Serial Communications interface
Fis4as, S422 and RSZ32 Protocol ANSI x3.28-2.5-A4 operation —
S485 Multidrop, equipment can be connected along the length of the cable (22
‘transmitters and receivers).
S422 One transmitter can drive ten receivers atthe end of the cable.
S232 One transmitter can drive one receiver.
2.3. Encoder Specification
PULSE RATE: 15 pulses per revolution per motor pole — jo 90 pulses per rev for
‘8 2:pole machine; 60 pulses per rev. for a 4-pole machine.
ENCODER OUTPUT: Rectangular square wave, Quadrature or complement signals are
‘not required.
‘Amplitude nominally equal to the supply.
‘Mark : space ratio from 40 : 60 to 60 : 40.
Rise-and-fallimes not o exceed 50us.
‘SUPPLY REQUIREMENTS: CD drives will accept either —
-24V signal (current sink)
( +SV signal (souree and sink)
“The drive will supply +24V at 100mA.
24 Electromagnetic Compatibility
Refer also to Chapter 10
Immunity
tn accordance with IECE01 without significant disturbance to operation atthe folowing levels:
Part2 (ESD) Levels
Part3 (Radiatod AF field) Level
Part 4 (Transient Burst) Level 3 (Level 4a control and serial nk terminals)
Par 5 (Surge) (Draft 1990) Level 4
‘Surge immunity in accordance with IEEES@7-1980
2.5 Drive Module Weights
DRIVE MODULE WEIGHT
ko
* CD75, D110 ery
* ©0150, D220, CD400 5.65
* CBS50, CD750 64
Control Ped 02s
Blank Pod on
(Optional RFI Fiter 10
Rear Case 275
‘Weight includes Rear Case and Control Pod. if
drive is supplied with a blank pod, reduce these
values by 0.15kg.
25
©D75-750 MECHANICAL INSTALLATION
3 Installation — Mechanical
3.1. Drive Mounting — General Requirements
3.2. Front- and Through-panel Mounting
3.3 Control Pod, Remote Mounting
3.4 Cooling and Ventilation
at
WS SSE: A
075-750
MECHANICAL INSTALLATION
6 Locations of principal components,
CD75-750 MECHANICAL INSTALLATION
3
Installation — Mechanical
3.1 Drive Mounting — General Requirements
Location
‘The installation should be located in a place free from dust, corrosive vapours, gases and all iquids. Care
‘must also be taken to avoid condensation of vaporised liquids, including atmospheric moisture
Ht the drive is to be located where condensation is likely to occur when the drive is not in use, a sultable
‘anticondensation heater must be installed, The heater must be switched OFF when the drive is
‘energised. An automatic changeover switching arrangement is recommended.
P Rating
“The drive enclosure contorms to international enclosure specification 1P10 itis therefore necessary to
consider the location of the module in the light of local safety regulations applicable to the type of
installation.
Hazardous Areas
‘The application of vatiable speed drives and soft starters of all types may invalidate the hazardous area
corthication (Apparatus Group and/or Temperature Ciass) of Ex-protected squire cage induction motors.
‘Approval and certification should be obtained for the complete installation of motor and drive,
CD drives are not to be installed in classified hazardous areas unless correctly mounted in an approved
fenclosure and certified (Refer to "Hazardous Areas" Chapter 4 Installation - Electrical".
3.2. Front- and Through-panel Mounting
Front-of Panel Mounting
Overall cimensions and dling dimensions are shown in Fig. 7. When mounting a drive in a cubicle, tie
important to provide adequate air-circulation space for cooling. Refer to Section 3.4.
‘Through-Panel Mounting
“The essential dimensions are shown in Fig. 7. To mount the drive with the heatsinks projecting through
the mounting pane! i is necessary to remove the Rear Case of the drive. Instructions for this are shown in
Fig. 8 Note that I it is intended also to mount the Control Pod remotely, the Pad can convenierty be
removed from the drive during this same procedure.
MECHANICAL INSTALLATION (CD75-750
FRONT.OF-PANEL MOUNTING
‘THROUGH PANEL MOUNTING
2 —-— 194 —4 ey
7
Ik
|
|
!
|
&
abt
L sntir
bets
7 Overall and mounting dimensions.
(CD75-750 MECHANICAL INSTALLATION
a
1 Remove the control terminals cover —
pull down and lit away.
2 Remove the 2 scraws, M4 x 10,
ther side of the power temninals,
Wwhich secure the Top Cover.
wares
tS
watt Bina
ay \ supponr
Lit the lower edge of the Tor
over una the Mating Lugs af the
age arotroe from he
Babe Wouing.
= ¢*
79 im
Bike Base hcadng.
{
t
'5 Remove the INSO peb complete. Ray
6 Remove the four sorews, MA x
{sone at each corner which
secure the Base Moulding to the
Roar Case. Lit the Baso
T install the Base Moulding out of
Moulding ro the
panel and secure
With four M4 x 16
-
Fives Ping
ence
aeons. TOCEMPLETE, vere
OME T Rn
8 Procedure for removing the Rear Case.
35
Sn He
MECHANICAL INSTALLATION CD75-750
1 Remove the control terminals cover —
pull own and lit away.
a ef
\ ‘sueroar
re
items caeeiae
auuraats treo
Bee Mouling.
songs aamSeaon
om
5 Sa the Top Cover aside, and
iave the INGO poo inthe base. ey
&
ENGAGE
PCB INSO
6 Turn the Top Cover on its face
and remove the four screws
securing the Control Pod.
7 Engage he po NEO iro the
ver, and re-engage the
Ninos 2 (of Steps 3, 2 and 1.
9 Procedure for removing the Control Pod
{rom the module for ram
36
CD75-750 MECHANICAL INSTALLATION
33. Control Pod Mounting
“The Contre Ped can be removed ftom Tocation on the front panel tthe cive and mounted anywhere
eo ec catance permitad by maximum cable lang of 100m tom the drive othe Pod.
To Remove the Control Pod from the Drive
1 Disconnect and SAFELY ISOLATE the power supply from the drive. 00 NOT REMOVE ANY
‘COVER MOULDING FOR AT LEAST FIVE MINUTES, to allow ample time for internal
caoastanoss to discharge oa eae votage.
2. Fallow the instructions shown ia Fig. 9
Remote Mounting of the Control Pod
“To provide aocess for the the control cabling to the rear of the pod, @ remote mounting requires @
‘small qut-out in the mounting panel. Drill the fixing holes and the cut-out as shown in Fig. 10.
Extension cable must be screened data cable. A standard 9-pin D-type plug is required at the
deve end, and socket at the pod end. Full details of control cables and screening are to be found
INSTALLATION — ELECTRICAL.
10 Remote-mounting for the Control Pod.
Driling and cut-out dimensions.
a7
MECHANICAL INSTALLATION 075-750
3.4 Cooling and Ventilation
Enclosure minimum dimensions
Care must be taken that the enclosure in which the drive is sited is of adequate size to dissipate the heat
‘Generated by the drive. A minimum clearance of 100mm all around the drive is essential, Fig. 11. All
‘equipment in the enclosure must be taken into account in calculating the internal temperature so as not to
raise the internal temperature of the cubicle above the maximum allowable forthe drive.
11 Aminimum distance of 100mm trom
the. enclosure boundaries. or from
adjacent “comtaciors, relays, and
Other. types of heat-producing
‘equipment is essential to allow
Citeulation of cooking at.
Effective heat-conducting area
‘The required surface area Ag for an enclosure containing equipment which generates heat is calculated
‘rom the following equation
Pe
a
KOj-Tamb)
whew Ag = Effective hoat-conducting area, in m2, oqualto the um ol he areas ofthe
furfaces which aro notin contac wih anyother auface.
PL = Powor loss of all hat-producing equipment in Watts.
Ti = Maximum permissible operating temperature ofthe drive module in °C.
inc,
Tamp = Maximum external ambient temperature
lamb
k = Heat transmission costfcient ofthe material trom which the onclosure is
made.
EXAMPLE
To caloulate the size ofan IP54 cubicle for @ CD750 (7.5KW) drive.
‘Tho worst case'is taken as the basis fr the example, so the folowing conditions are assumed
“The drive sto be operated at 2.9kH2 PWM switching frequency (b14 = 2.9).
+ The instalation isto conform to IP54, which means thatthe dive module and its heat srk are to
be mounted wholly within the cubicle, and thatthe cubicle is vitually sealed and without any
ventilation of the air inside, Heat can escape only by conduction through the skin of the cubicle,
which is cooled by radiation to the external air
CD75-750 MECHANICAL INSTALLATION
12 Enclosure with typical
Biotitaows undBe
lsperse heat
«The cubicle is to stand on the floor and against a wal, Fig.12, so that ts base and back surfaces
cannot be considered to play any part in the cooling process. The effective heat- conducting area,
‘es provided by the top, front, and two sides onl.
+ The cubicie is to be made of 2mm sheet steel, painted.
+The maximum ambiert temperature is 25°C.
To Find the Effective Heat-conducting Area
“The values ofthe variables appropriate to the above specification are —
= 286W (trom the table of Losses, CD 750 module operating at 2.9KHz
PWM switching frequency, Section 2.1, page 2-3)
= 80°C (forall CD75-750 and CDV7S-750 drives)
= 25°C
k= 55 (typical value for 2mm sheet steel, painted)
28
55 (60-25)
= 2.08m2
NOTE
this essential to include any other heat-generating equipment in the value for P.
To Find the Dimensions of the Enclosure —
fa cubicle is to be fabricated to suit the installation, there is a free choice of dimensions. Akernaively, ¢
may be decided to choose a cubicle from a range of standard products
Either way, its important to take into account the dimensions of the drive module, Fig. 7, and the
‘minimum clearance of 100mm round the module, Fig. 11
“The procedure isto estimate two of the dimensions — the height and depth, for example — then calculate
ird, and finally check that it allows adequate internal clearance.
39
MECHANICAL INSTALLATION CD75-750
“The effective het-conductng area oa cubis located onthe foor and against one wall as shown in Fg. 125 —
Ag" 2AB + AC + BC
‘Suppose the cubicle height Ais 1.0m to aw adequate clearance above and below, and the deoth B is
(0.5m, a8 a frst estimate. The actual figures chosen in practice wil be guided by available space, perhaps,
or standard enclosure sizes. Since Ag, A, and B are known, the dimension to be calculated is C. The
‘equation needs tobe rearranged to enable Cto be found, thus —
Ag-2AB=C (A+B)
° cw Ae2A8
Aw
ce 28
2.08
ce 28
C= 0.78, or 780mm approx.
Clearance on either side of the inverter module must be checkad. The width of the module is 170mm,
Fig.7. 100mm clearance is required all round, s0 the minimum internal width of the enclosure must be
370mm or 0,37m. This figure is within the calculated width at the selected height, and therefore
‘acceptable. However, although the figure allows additional space, any additional equipment must be
‘considered as a factor in the total power losses P,, and may demand that the calculation is reworked.
0, recalculate Ag, modify the value of C it necessary to allow for other equipment, and re-cakculate either
‘of the other two dimensions A and B.
1 a catalogue stock enclosure is to be used the corresponding surface area should be not less than the
figure calculated for Ag.
this important that heat-producing equipment should not be located below the drive.
‘As a general rule, it is better to locate heat-generating equipment low in an enciosure to encourage
internal convection and distribute the heat. If # is unavoidable to place such equipment near the top,
‘consideration should be given to increasing the width and depth dimensions at the expense of the height.
Enclosure Ventilation
Wa high IP rating is not a critical factor, or if a ventilating fan can be used to exchange air betwoen tho
inside and the outside of the enclosure, the enciosure can be smaller.
To calculate the volume cf ventilating air, V, the following formula is used —
34 PL
Tam
vos
where Vo =Required airflow in m3 ht
‘To Find the Ventilation Required for a CD750 Drive —
= RW
J, = 50°C (lor all CD75-750 & CDV7S-750 drives)
Tamb = 25°C (or example)
Thon 1x 288
8
Vo = 95.46 m8 het
or, say 36m$ ht as a practical minimum.
310
(CD75-750 ELECTRICAL INSTALLATION
4 Installation — Electrical
a
4.1 Installation Safety
4.2 Power Connections
4.3. Control Connections
4.4 Other Configuration Details
4.5. Connecting Serial Communications
an
CD75-750 ELECTRICAL INSTALLATION
4
Installation — Electrical
4.1 Installation Safety
Safety
‘The voltages present in the supply cables, the output cables and terminals, the control power
supply wiring and in certain internal parts of the drive are capable of causing severe electric
‘shock and may be lethal.
ELECTRIC SHOCK RISK!
Whenever the drive has been energised, it MUST be ISOLATED betore work may continue. A period
Oi seven minutes MUST elapse atter isolation to allow the internal capacitors to discharge fully. Unti
the discharge period has passed, dangerous voltages may be present within the module.
Persons supervising and performing electrical instalation or maintenance must be suitably-qualfied
‘and competent in these duties, and should be given the opportunity to study, and to discuss if
necessary, this User's Guide before work is started.
Hazardous Areas
‘The application of variable speed drives and soft starters of all types may invafidate the hazardous area
certification (Apparatus Group andiot Temperature Class) of Ex-protected motors. Approval and
Centfisation should be obtained for the complete instalation of motor and drive, (Refer to Chapter 3
“INSTALLATION MECHANICAL”)
Earthing
‘The drive must be connected to the system earth at the power earth (PE) terminal provided on the power
terminal block. This terminal, marked with the standard ‘earth’ symbol, Fig. 14, is to be distinguished from
the terminal marked Ezuc. Earth impedance must conform to the requirements of local industrial safety
regulations and should be inspected and tested at appropriate and rogula itarvats.
“The Eexc terminal must be linked to the earth (PE) terminal to bring the Integral RFI Fite into use. Wis
Tcommended that this iter is used as in most situations it provides an etfective reduction of AFI
‘Omissions into the mains supply. it does, however, introduce 2 small leakage current. ¥ this leakage
Current is not acceptable, the Eguc terminal should be left unconnected. Refer to Chapter 10, Section
410.9 for information on leakage current levels.
In order to ensure the electrical safety of equipment incorporating the drive, tis important that a fixed
‘tarth connection Is provided, e the safety earth Is not connected solely through a flexible cable or
Connector which might become accidentally disconnected or open-circulted.
If additional fitering is required, an optional RFI iter is available. Refer to Chapter 10.
Grounded Detta Supplies
“The drive is designed for use with conventional three-phase supplies which are symmetrical with respect
to earth, Surge suppression devices ate included to protect the drive trom lightning-induced overvotages
between lings and earth. For this reason the drive must not be used directly with supplies where one
phase is grounded, ie the voliage between the other phases and ground is equal to the line votage (the
Grrangernent sometimes referred to as "Grounded Delta” in the USA). In such cases an isolation
transformer must be used to provide a supply balanced with respect to earth.
43
eopeaey che cy samt
CD75-750
ELECTRICAL INSTALLATION
13 Locations ot principal components.
CD75-750 ELECTRICAL INSTALLATION
Motor Speed
Standard squirrel-cage ac induction motors are designed as single speed machines. If it Is
intended to use the capability of the drive to run the motor at speeds above Its designed
maximum, it ls strongly recommended that the motor manufacturer Is consulted first.
‘The principal risks due to overspeeding are the destruction of the rotor by centrfugal force, or of the
‘bearings by vibration or heat.
Low speed is liable to result in overheating of the motor because the effectiveness of the internal cooking
fan reduces in proportion to the square of the reduction of speed. Motors should be equipped with
thermistor protection, and if full benefit of the use of low speeds is to be gained from a variable speed
ceive it may be necessary to arrange additional cooling for the motor.
42 Power Connections
FRter to Fig 14
Terminals
‘Access to the power connections is gained by removing the Terminal Cover, Fig. 13. Mf internal RFI
‘itering is required, link the power earth and the Eguc terminals by a 2.5mm? wire link, Fig. 14.
Li Line 1(R) *U" Motor Phase -U "47 DC Link Positive
12 Line 218) “Vt Motor Phase - V “DC Link Negative
13 Line 3(T) "W Motor Phase - W
Eye Intergral RFI tor Power earth
‘The layout of the power terminals and connections is shown in Fig. 14.
PERMANENTLY
‘CONNECTED
‘TOE BUS.
MAINS SUPPLY 7
|CONNECTS INTEGRAL
| SAFETY EARTH MUST
‘BE CONNECTED
RRIFILTER
14 Power terminals and standard connections for the drive.
45
aba ie Hiss he aan
ELECTRICAL INSTALLATION CD75-750
Fuses and Cables:
Dike | “Raconmonaed | Topas
Bie, | “Aecrmaen | eee
a seo
A net
cos $ i
con) i
coun a 5
ooze c is
coe ‘e 2
come | 20 2s
+ The use of slow fuses is recommended because a current surge may appear at power on. As an
attemative to fuses, mebs or mocbs may be used i equipped with adjustable thermal and magnetic
‘tip devices of a suitable rating.
f The cable sizes are for 3-core and 4-core pvc-insulated armoured cable rated at 6OOV ac (1000V de)
‘and laid in accordance with the maker's defined conditions.
Power Cabling
‘The cabling o the drive must be rated for 600V ac of 1000V de. Cable sizes speciied are for PVC/SWA
cables laid under defined conditions, and are general recommendations only. Cabling should conform to
local codes of practice and regulations.
Connect the 3 phase mains supply to the large terminals, L1-L2-L3. The mains supply should be fed via
an isolator, contactor, mcb or mecb, with {uses or thermal current protection.
Discard the labal ‘WARNING — FIT FUSES". This is @ reminder to ensure thatthe mains supply ia
adequately protected. Connect the motor terminals to the U, V, W terminals ofthe ve, The dive MUST
BE EARTHED.
“The power connections from the drive output to the motor may be switched, for isolation purposes, but not
{or control purposes, 2s the drive may trip. Installations prone to mains vokage disturbances may need
special consideration; $0, consult the supplier of the drive.
Installations with long cable runs, to the motor, may need the addition of motor line chokes, to prevent
fuisance tripping of the drive (PrA = Ol) caused by capacitatve loakage effects. Refer to the table on tho
following page.
Electrical Interference
‘Some attention is needed to the arrangement of the power and earth connections to the drive to avoid
interference with nearby sensitive equipment. The cable to the motor caries rapidly-switched voltages
‘and should be routed well away from sensitive equipment.
‘The earth core of the mator cable should be connected directly 10 the drive earth terminal, a8 shown i
Fig. 14. It should not be connected to the drive indirectly, for example through a cubicie-earth busbar;
this will cause hightrequency current to circulate in the earth system of the cubicle. At the motor end, the
‘earth core should be connected to the motor earth terminal inthe normal manner.
Screened or armoured cable may be used to prevent emissions from the motor cable. The screen or
armour should be connected in the same way as for standard cable, that is, to both the motor earth
terminal and the drive earth terminal.
‘The drive input power safety earth conductor should follow the same route as the input power conductors.
It should be a dedicated earth wire, not ‘dalsy-chained’ from any other equipment in the cubicle.
CD75-750
ELECTRICAL INSTALLATION
Langt of able sbove which motor the chokes may be rqued
(pa ee
| Module cD75 | cD110 | CD150 | CD220 @0400 | Coss Choke
| oS | Vive
an [eee [aortas [eases [ores [oat [osm | imi
Length (m) | oo_180 | 125-250 | 145-290 | 165-330 | 200-400 | 300-600 | 2mH
cage [sme | om | | om | | mA
her usc ine dake hte pat abo Bis eamended a te 22 PWM pichingrequecy
eeenlminc tne Wo ken
creer
ELECTRICAL INSTALLATION CD75-750
TERMINAL ———————__———,
REFERENCES i
cosnecton "| JogPPreset Speed input | A12
REFEREM JS Preset Spoed2 input | AIT PRESETS
S preset Speed input | Ato f}———__-}
so8,
even | wa
(OV Common A =
‘Statue Out DRIVE RUNNING AT
: a MINIMUM SPEED
‘solated Commsov | C1
A} 23
reweur ate
At 2
recente << a
19 Load Ouput
SERIAL
COMMUNICATIONS.
uNK
BVI S|P RRR L|Bjpsys
Ria!
8 Frequency Output
7 is Forward/Reverse Input
Localemote Input
Fun input
‘Stop Input
Reeat input
Exemal Trp Input
-——} 11 OV Common,
10 Encoder Input
Motor Thermistor Input
‘Carag Spod Fates
tion
‘Torque Referance Input
“s1OV Reterence
Speed Fate
(Local) Input oa
ov Common
t Status Relay NC
fT Stane Relay NO
|t status Retay Common 1
‘NOTES
+ 1 Betore connecting motor thermistor, refer to text page 4-9, terminal 9.
| 2A'Stati lay cin be programed as an rel .
5 SLPS inves the play ofthe eterno. Factor Sting i compatble wih
4 Riclay can be connected directly betwoen Ay and A, for ‘ive running at minimum speed.
15. Control terminals and typical extemal control circuits.
48
©D75-750 ELECTRICAL INSTALLATION
43 Control Connections
Refer o Fig. 15.
For control connections use cable of 0.5mm? screened. Connect screen to earth AT THE DRIVE ONLY.
“Aiways segregate control and power cabling. Connections to termina are shown in Fig. 15 and should be
made to earth at the sending end i long cables are used (i.e. greater than Sm).
‘Auaillary Supplies and References
424V 4 10% 100mA 4
Seey ser een )) san creuitprotte ov
OV Analogue
OV Digital
‘0V Serial Communications (isolated)
Logic Inversion
By atering the postion of link PLS (Fig. 16) the logic of the cigtal inputs and outputs is inverted, eo that
the "on’ state corresponds to +24V (positive logic) instead of the standard OV (negative logic, as
Golivered). This allows the use of certain types of programmable controller in which positive logic is
‘standard.
‘Specifications of Control Inputs and Outputs
ANALOGUE INPUTS
Local speed reterence: unipolar 0 to +10V, 110K input impedance
for bipolar -10 to +10V, 110K input impedance
Remote speed reference: ‘40 20mA, 100 ohms input impedance
(of © -20to4mA, 100 ohms input impedance
‘of 010 20mA, 100 ohms input impedance
Torque reterence: (010 +10V, 27K input impedance
Motor thermistor: Motor thermistor terminal voltage < 2.5V, capable of
protecting from 1 to 6 standard 250R machine
thermistors connected in series.
‘Trip resistance 3k: 15%, reset 1k8 215%.
‘Short circuit protection will nt trip above 100R.
DIGITAL INPUTS
Digital inputs (1-8), can be configured for either postive or negative logic via hardware inks, which should
‘only be adjusted at commissioning.
Negative logic (lactoryfited option), active low, 5k input impedance.
Positive logic, active high, Sk input impedance
NOTE High = +24V de, low = ze10 volts — applies to nogative and positive logic.
Input Functions for Negative Logic
External Trip: low = no trip, momentary high = trip (NIC contact)
Run: momentary low = start (N/O contact)
Stop: low = not stop, momentary high = stop (NC contact)
Reset: momentary ow = reset faut (NO contact)
LocalRemote: + low = select romote reference
igh = salet local reference
ForwardMeverse: low = select raverse direction
high = select forward direction
Proset Speed 1 (Two binary preset inputs select preset speeds,
Preset Speed 2: when both high normal speed contro is selected)
Sogn tow = jogfnch
NOTE Momentary = hold state for 216 ms.
NOTE The Jogiinch input can be software selectable to give a third preset speed input and thus a total
of sevenpreset speeds.
“9
ELECTRICAL INSTALLATION ©D75-750
DIGITAL OUTPUTS
Drive Status or At-Spoed Relay
Drive Running or Minimum Spaod
ANALOGUE OUTPUTS
Frequency (Speed):
Load (Torque:
De-energised at power of, crive tripped at speed operational. Volt free contact,
‘7Aresistive, Changeover type relay. Software programmable assignation.
Open collactor or PLC type 24Vde output, 025A sink capabilty and 0.05A source
capabilty. Software programmable assignation.
10 10Vde, SmA capability; OV = , 10V = .
Accuracy + 2%.
“ADV to +10Vde, SmA capability; OV = no load, -10V = 150% regenerating,
#10V = 150% motoring
Accuracy # 10% above 15H2 with matched motor.
410
Enabletdigable link
PLE for motor
Logie selector ink PLS,
Postions 1 & 2
for negative loge.
Location for Serial
Control Pod
‘connector.
thermistor.
16 Top Cover removed to show location of
‘components on peb INSO.
ibis
CD75-750 ELECTRICAL INSTALLATION
Functions of Control Terminals
Torminat
Number D/A Description
NOTE
D = Distal
Az Analogue
1 D StausorArSpeedray
common Votttrae change-over contact, 240V AC 7A
| resistive oad
2 (0 Status or At-Speed relay | Relay energised when drive heathy/at speed:
normally open | do-energised when drive of, tipped, or not at
| speed. Contigured by parameter b50.
3 D Stas or ArSpeed relay |
rormally closed J
4 A Zerovoks common _—ntarnally connected to terminals 11, At.
5 A Local set speed 410k potentiometer or voltage signal OV to +10V or -10V
10 +10V potentiometer input (BIPOLAR) 110k input
impedance. Configured by parameter b4.
6 A SOV 2% reference SmA maximum loading (short-circuit proot to zero vos)
votage
7 ‘A Torque reterence 10k potentiometer, or votage signal, OV to +10V, 27K
input impedance (always acive, independent of pararnator
0}.
8 A Remote set speed 4220mA of 20/4mA or 020mA, 100R input impedance.
current input Configured by parameter B11.
° A Motor thermal peo- Vout <2.5V. Trp resistance 3k 15%, reset 1.8k = 15%
tection (thermistor) ‘Short reut protection will nat tip above 100R.
input
NOTE f no motor thermistor isto be used, a link on the INSO pcb must be repositioned to disable the
Input. Refer to Fig. 18 for location ofthe link,
FRoter also to the paragraph Logic Inversion on page 4-9.
10 D Encoder input OV to +5V at 16mA open collector.
‘Square wave, mark:space 60:40 or 40:60, up to 24V,
15 pulses per motor pole per revolution (enabled by
parameter BS)
" A oVcommeon {eternally connected to terminals 4, A1.
12D Extemaltrip tow = no tip
momentary high « tip (NIC contact to zero volts)
19D RReset momentary low = rest faut (NO contacto ro voks)
14D St» low = not stop, momentary high = stop
(NC contact to 2210 vots)
15D Run(star) momentary low = star (tun) (N/O contact o zero vot)
16 —_D_LocalRemote tow « select remote reference
high « select local reference
7 D fwdiev input low = select reverse direction
high = select forward direction
ELECTRICALINSTALLATION 075.750
17 Basic RS485 Serial Communications arrangement
‘and serial address. Unique entity code for up to 32
fives per communications port atthe host.
Receive Transmit
OV (pret.) or Differential
GND from host twisted-pair cable
transmitier
18 S495 oF S422 serial communicatrions 19 _RS232__serial communicattions nk
ink connections. Cable must be screened. connections. Cable must be scroonsd:
412
(CD75-750 ELECTRICAL INSTALLATION
Terminal
Number D/A Description
18 ‘A Frequency output V10+10V, 5mA. Accuracy +2%
signal OV at Pro, 10V at Pri
19 A Load output signal OV 10 +10V, 5mA
OV =no bad
+1OV = 150%FLT monitoring (120%
“10V = 150%FLT regenerating HVAC)
Accuracy 10% above 15Hz with
matched motor
20 D Serial link receive A or B
- ‘Two lines for diferential receive
a D— Satia ink receive A
Dire apt: 90 SV, ng impedence 35k
V(A-A) > +0.2V = Logic high atthe microprocessor.
V(&-A) <-0.2V = Logic low at the microprocessor.
2 D Serial link transmit A or B
_ Twines for differential transmit
23 D Seria ink transmit A
Diterenial Outpt: Output is to SV, curent cxpabity + 6OmA
Logic high at the microprocessor A = SV, A= OV.
Logic low at the microprocessor A = OV, A = SV.
[Not transmitting (intornal buttar is tr-stated)
‘A, 10k pull up to SV; A, 10k pull down to OV.
Rater also to Section 4.5 below, and Figs. 16.
e ‘A Serial ink OV common Isolated from zero volt terminals 4, 11. Serial link is aways active,
parameter b6 allows control.
NOTE Refer to Chapter 8 “SERIAL COMMUNICATIONS" for further details.
40
al
ato
ant
a2
D
Drive running
Zero volts common
+24V supply, 100mA
Preset speed 1
Preset speed 2
Jogyinch
Programmable open collector output source, 30mA from or
‘minimum speed +24V sink, 250mA to OV. +24V extemal relay de-
‘energised if rive not running or not at minimum speed.
Configured by parameter b53
Intemaly connected to terminals 4, 11
General purpose (10%). Short-crcut protected from OV.
‘Two binary preset speed inputs salect 3 proset speeds.
When both are high, normal speed control is salected.
(NO contact to ze10 votts)
Low = Jog/inch (N/O contact to zero volts)
‘This input can be software soloctable to give a third preset spood
Input and thus 2 total of 7 preset speeds.
Configured by parameter 820)
413
ELECTRICAL INSTALLATION ©D75-750
4.4 Other Configuration Details
The outline of the control PCB is shown in Fig. 16. The only remaining customer useable selections are —
PLS To select positive or negative (standard) contol logic.
125 ‘Serial communications terminating resistor. Refer to Fig. 17.
PLE Link to enable/diable motor thermistor input
45 Connecting Serial Communications :
‘SERIAL COMMUNICATIONS VO
‘The standard connection is RS485/RS422, refer to Fig. 18. Always use screened, twisted-pair cables for RS485
serial, Alternatively the single ended communications system, RS232 can be used, Fig. xx.
‘Serlal communications cabling —
IS485 cable type, braid screened, 120 Ohm characteristics impedance dual twisted pair.
Termination: Cable terminated at each end by 120 Ohm resistor.
Maximum cable length: 120 m.
S422 cable type: braid screened, 100 Ohm charactetstics impedance dual twisted pair.
‘Termination: Cable terminated at receiver end by 100 Ohm resistor.
‘Maximum cabie length: 120 m.
S232 cable type: braid screened, 3 core.
‘Termination: None.
Maximum cable length 15 m.
414
CD75-750 ELECTRICAL INSTALLATION
5 Operating Procedures
‘sone nono essen
5.1 Safety
5.2. Setting Up to Run
5.3 Keypad and Display
5.4 Modes of Operation
CD75-750 OPERATING PROCEDURES
5
Operating Procedures
51 Safety
Safety procedures must be properly observed
It Is advisable particularly to take care to check the
Girection of rotation of the motor
Ensure that...
* the person in charge ofthe tral un is fully competent to perform or supervise the mechanical and
the electrical instalation.
+ the motor rating is compatible withthe inverter rating,
the motor fs securely boted down,
+ the invertors firmly attached in an upright postion and is property ventilated.
Pretiminary
For access to the power and contro! terminals, remove the Terminal Cover — the lower portion of the lid,
Figs. 6 and 13. Make power connections as shown in Fig. 20.
+ Electrical supply connections must be earthed in accordance with local industrial safety
regulations,
Protective hre fuses or a circuit breaker of the correct rating must be installed in the supply, rotor
te Chapter 4, Section 42, page 4-5.
MOTOR
EARTH
MAINS SUPPLY
SAFETY EARTH MUST
BE CONNECTED.
ICONNECTS INTEGRAL
RFIFILTER
20 Power terminals and standard connections forthe drive.
OPERATING PROCEDURES 075-750
{ OV common (intemally connected)
21 Spustra control components and connections to enable the dive 1o
‘operate under Procedure A.
Procedure 2h and noe Snel coral wiring ta start anda op swich, wih a potertiomeer
a8 shown Sagara tan strain of parame athe heypa Sang end enero
Shs, mode is a8 simple as with a conventional tater sro ‘motor is immediately under manual speed
Procedure A
External contro, not using keypad,
‘At Install the contol wiring connections to terminal boar, ‘shown in Fig. 21, as follows —
Terminals 4, 5,6, so at Potentometer. Ensure thatthe potentiometer is sot atthe
er0 volts point.
Termina's 9, 14 T.a.motor thermistor is avaiable, connect betwoen terminals 9 and ",
‘efer to Chapter 4 Section 4.3, page 4.
Mec te thermistor i 1 be used, a link on the INSO pcb must be
‘epostioned to disable the input. Fer to Fig. 16 fr lcatbonoy aie
Terminals 11, 12, Unk together to bypass the external trp,
54
(CD75-750 OPERATING PROCEDURES
Terminals 11, 14, 15. Install two control switches —
RUN switch, normally-open contacts, torminals 11 and 15, and a STOP switch, normally.
closed contacts, terminals 11 and 14.
A2 Set speed pot to minimum speed. Tum on the 3 phase input. Close the RUN contro! contact.
‘Observe that the Inverter Active’ LED and the FWD’ LED illuminate. The keypad display indicates.
(0. The motor remains at rest, but is energised at zero Hz.
3 Turn the potentiometer a small amount to start the motor at low speed. Observe that the keypad
display indicates the motor speed. The value shown is the frequency supplied to the motor.
NOTE tis not advisable to run the motor at low speed for any length of time, especialy iit is
loaded, unless the motor has a thermistor for over-tamperature protection and this is connected
1 the drive as shown in Fig. 15, page 4-8, or arrangements have been made for additional
cooling.
Ad Use the potentiometer to increase and reduce speed. The motor is at full speed when the
display shows 50.0 and the potentiometer is at the +10V end.
‘A5 Operate the STOP switch.
‘Observe that — the motor ramps to rest,
‘eypad display value reduces to zero,
the keypad display changes to rd¥.
‘The display indicates that the motor is now stopped. The output bridge is not energised, as indicated by
the ‘inverter Output Active’ LED being extinguished when rd appears.
[At this stage adjustments can be made to some parameters for practice and to observe the effects. The
drive can be powered-off at any stage of the procedure.
Press the RUN switch at any time to restart the drive.
Observe that — the motor ramps to the potentiometer set speed, and the keypad display
changes from Fd¥ to @ numerical display of the set speed expressed as a
frequency.
Procedure B
Keypad control, without using external control cuts.
FIRST DISCONNECT THE POWER SUPPLY
B1 the motor has a thermistor, and this is to be used for protection, connect it between terminals 9
‘and 11. ithe thermistor input is not being used itis necassary to disable the internal circutt
Link PLE must be removed, Reter to Fig. 16, page 4-10, for the location o lnk PLE.
82 __Turmon3 phase input and observe that the keypad display becomes active and shows rdY.
83 Make control parameter adjustments to put the motor under Keypad Control, as follows
‘SELECT KEYPAD CONTROL b9 = 0
NOTE When using the keypad, i there is a pause of 8 soconds between successive keystrokes, the
display will overt to a non-active state. Press MODE to resume wherever keying paused.
Press the MODE key to enable a parameter to be selected. Observe that the PAR LED illuminates. The
display will show PrO, aerating with 0.
Press either the UP or the DOWN kay. One key-stroke always changes the display to the noxt parameter.
Choose parameter b9. The display alternates betwoon b9 and its present valve, which wil be 1. This is
the as-dalivered value, and means that the motor is in TERMINAL control mode. (If 8 seconds elapses
between keystrokes the display reverts to rd and the PAR LED will go off. To resume adjustment, press
the MODE key again.)
ened
ss
OPERATING PROCEDURES 075-750
Prass the MODE key to hold the display value 1, then press the UP or the DOWN key once to change the
value to 0.
Press the MODE key to ext the parameter adjustment.
Control is now in KEYPAD mode and the display will akernate betwsen b9 and its now value, 0. Ater és
the display wll change to rd and alternate wth the sat speed value inital zero)
RUN AND STOP THE MOTOR
Press the RUN key. The motor will start and run up to the sot speed displayed. Presb and hold the UP key
to increase the set speed.
Press the STOP key. The motor will ramp to a stop, and will display rdY, aternating with the set speed,
when the speed reaches zero,
When tha display is not showing a parameter, o is not being used to change a parameter, the set speed
‘can be adjusted by using the UP and DOWN keys.
lavertor output active
Serial comms active
Dynamic brake active
(Current iit active
Remote control of drive
22 The Control Pod. fight, the four-panel digital dis with ‘NEG’ LED
‘ahes Leer et, ro (Ss nee aan is play wis NEG Le
LED uminates vnan the daplay fs showing a parammoter sucbar fhe CWS
when the drive is conrlld o Tur forward
56
CD75-750 OPERATING PROCEDURES
53 Keypad and Display
Control Pod, Fig. 22. Display Features, Fig. 23.
‘The Control Pod combines keypad and display functions. All operational functions of the drive and motor
‘can be controlled and all parameter values can be changed from the keypad. Parameters and their values
‘are adjusted by the three upper keys. The three lower keys control motor RUN (stan), STOP/ RESET and
FORWARD/REVERSE when in keypad mode (b9 = 0).
‘The upper row of three keys controls the parameters in two modes — selecting a parameter number and
‘changing a parameter value.
Parametar numbers or values, as appropriate, are shown in the four-window display, with an LED to
indicate when values are negative. When parameters are being read or changed, the display defauts to
the Present indication (see Display Description, below) after 8 saconds without a keystroke,
Operational status is shown by the group of five LEDs on the Iett of the keypad and also by the
Forward/Reverse LED above the FWD/REV key.
‘A feature of the control pod is that it can be demounted from the module. This enables the drive module to
‘be located in a secure enclosure and the control pod to be located in an accessible posttion. The
Procedure for removing the Pod is described in Chapter 3, Section 3.3, page 3-7.
When demounted, the pod is connected to the module by standard 9-way control cable (preferably
screened) connected one-for-one to standard 8-pin D-type terminations, one male, one female. Maximum
length of cable is 100m. Leads can be obtained from the supplier of the diva.
‘The faciity to demount the control pod can also be used to provide secuty, as the pod can be removed
‘completely. Removal of the pod in terminal mode — even while the drive is active — has no effect on the
‘operation of the drive. Removal of the pod in keypad moda, i the drive is running, will ause it to stop.
Display Description
When parameters are not being read or adjusted, the display shows either drive status or running
performance, thus —
DRIVE CONDITION DISPLAY
Healthy and stopped ‘ether — rd
(Terminal Mode, b9 =1)
or— rd ahtomating with SET SPEED
(Keypad Mode, b9 = 0)
Heatthy and running be =t
‘either — output tirequency (b8 = 0)
or— oad in % of output FLC (68 = 1)
Note that whichever value is displayed, the other can be viewed by
pressing both UP and DOWN keys simuttaneously.
b9 = 0 set frequency
Tripped Trip Code Reter to page 5-1
When the drive trips, Trip Code flashes.
When the drive i in the process of boing resat, Tip Cod
(0ot ashing).
When the drive completes the reset,
‘ther — the display shows rd (Manual Start mode) and the drive
waits fora star signal
or— the drive automatically starts (Auto Stan mode)
steady
57
OPERATING PROCEDURES CD75-750
11 Hardware taut at power-on cir |= I | ul or CO}
ri rer Riba
2. Parameter number and its value. Ie] = Ao =
MODE key pressed once. Parameter Number Parameter value
3 Adjusting a parameter value. , a
MODE key pressed twice. 4
4 Drive TRIPPED LE =
ip Ce
5 Drive TRIPPED and RESET. {Only for 1s) a
6 Drive STOPPING 1 Ramp mode Co
2 Coast to rest (nih >
ive nhied
3 Injection brake cS
3 baking moe
7 ve STOPPING 1 Keypasmode [T— d/i]}== a
* rive ready wart
2 Terminal mode
bent =
8 Drive STARTING Sgieting ‘spinning motor a
9 Drive RUNNING 1 Koypaa mode Co
2 Terminal mode a
UP and DOWN keys.
Pressed simultaneously
3 Terminal mode Co
bent
1, 2ce, Prony of display soa ora
1 2a Priority of display RED og
oy preaueney
SB Display shemating ‘oe oF anbing.
BW PAF LED itsminated
PAR LED of
23 Display features,
58
(CD75-750 OPERATING PROCEDURES
Display Flashing
‘The display flashes when one ofthe following conditions is present —
+ The drive has tripped and display is showing a Trip Code,
+ Apparameter value has been adjusted to one ofits limits
+ Allunused decimal points flash to indicate when the drive output has entered the Ix t region
Display Value
‘Selected by parameter b8, During normal operation, and when the drive is not in Keypad mode (b8 = 1),
the keypad display can show either the motor speed or the load. Load is displayed as a percentage of full
toad current.
‘Speed in Hz b8 = 0— Actual frequency delivered to the motor, not the set speed frequency
Load%FLC B= 1
‘A quick way of changing the displayed value from speed to load or from load to speed is to press both the
UP and DOWN kays simultaneously. 1b = 0, the Set Speed is displayed rogardless of bS.
Operational Status
Five red LEDs 1 the left of the keypad, and the LED above the FWD/REV key indicate the status ofthe drive.
INVERTER OUTPUT ACTIVE indicates that the output power bridge is active (even if output
frequency is zero H2).
SERIAL COMMS ACTIVE indicates the serial link is actively sending or receiving information
DYNAMIC BRAKE ACTIVE indicates the dynamic braking threshold has been exceeded, due to
regeneration — that is, the dc link voltage has exceeded a given level above the ac supply voltage.
CURRENT LIMIT ACTIVE indicates the drive is in current (torque) limit which means one of the
following —
+ the load exceeds either the full load of the motor as set by Pr4, of —
+ the torque limit as set at torminal 7.
+ the output current transiently excoeds the 150% (HVAC 120%) drive output.
REMOTE CONTROL OF DRIVE i an indication that the control mode is Remote, as determined
by terminal 16, This means that the drive speed reference is either 4-20mA current controlled or
‘serial comms controled.
‘The LED above the FWO/REV key indicates the direction of rotation demanded. The actual
ireetion of motor rotation at any instant may or may not correspond. LED illuminated means FWD
‘demand. LED not illuminated means REV demand.
Manipulating the Parameters via the Keypad
To Select a Parameter
‘The MODE key enables a parameter number to be selected. When the MODE key is pressed the green
LED (PAR) above the MODE key is Huminated, a parameter number is displayed, and atemates with the
parameters value. Ordinarily, the PAR LED is extinguished.
With the PAR LED illuminated, press the UP or the DOWN key once to select the NEXT parameter. To
‘scroll through parameter numbers press UP or DOWN repeatedly. there is a delay of more than 8s in
pressing another key, the display will default to the Present Indication (see above) of the output of the
drive. Pressing MODE again returns to the parameter selected.
‘To Read a Parameter
‘Select a parameter (when the PAR LED is extinguished) by pressing the MODE key once. The LED will
iluminate, and the display will show the Pr or b number, alternating with the value, of whichever
59
OPERATING PROCEDURES 075-750
‘Structure of Prd menus and access procedure.
5-10
CD75-750 OPERATING PROCEDURES
parameter was last read or adjusted. The display will atemate between the parameter number and its
Value for a potied of 8s, afiar which It will defauh to the Prosent indication. if a different parameter is
required, select as explained above. The new parameter will aternate with ts valve in the display for 8s.
‘To Change a Parameter
‘STOP FOR BIT PARAMETERS!
Bit parameter values can be changed only when
the drive is stopped and the display is showing rd, or
the drive has tripped, then the Trip Code wil flash in the display.
In both cases, the Inverter Output Active LED is not iluminated.
press the STOP/RESET key i the drive is in Keypad control mode (b=0), or open the
‘eontrol mode (b9=1). Wait unl the display shows rd.
‘SEGURITY CODE!
Wf a Security Code (s00 below) has boon assigned it is not possible to change any parameter value
Unt! the correct code has been entered. Any parameter can be read without need for the Security
Code, with the exception of Pr d menu 10 to 50.
Select the required parameter. When the PAR LED is illuminated, press MODE once. The display will
hold the parameter value steady. If a further keystroke is not made within @s, the displayed valve will
dofauk to the Present Indication.
‘The values of all Pr parameters can be adjusted whether the motor is running or not.
‘Change the parameter value by pressing the UP or the DOWN key. A single keystroke changes the value
by 2070 of 40.1, depending on display resoktion. Press and hold either Key) to increase or decrease the
‘parameter value to the maximum or minimum avaliable. The parameter change acts immediately on the
internal setting. I the drive is operating the motor, the motor responds to the change as iis being made.
The last parameter value set is stored it the power supply is disconnected, and is restored when the drive
is next energised.
DECIMAL VALUES!
‘The display operates an automatic floating decimal point. According to the range of values of the
parameter, the display inserts a decimal point appropriately.
For example, the range of Pr2 is 0.2 to 600s. The display will therefore show all values between 0.2 and
1600, The range of Pr6 is 010 25.5%. The values displayed will therefore be 0 to 25.
NEGATIVE VALUES!
‘A negative value is indicated by the negative LED beside the display becoming illuminated.
Parameters Pr20 to pr28 are the only ones which can have negative values. The priorty is set by the
FWDMREV key.
‘Access to Parameters,
Fig. 24 shows the configuration and manipulation of drive parameter menus.
ea
OPERATING PROCEDURES CD75-750
Security Code
Selected by parameter Pr. Prevents unauthorised alteration of any parameters.
To assign a security code, the drive must be energised.
Using the Control Pod, the code can be sat to any three-digit number from 100 to 255, or 0. Press MODE
to onter,
Using Serial Communications, the code can be set to any number from 0 10 255.
When a securty code has beon assigned, each time the drive is energised the code must be used to allow
adjustment of parameters. To gain access, select Prb, set tho code number and press MODE.
Parameters remain alterable without further use of the security code until the power supply
‘disconnected trom the drive.
It the wrong code is entered, parameters will not be availabe for adjustment. Return to Prb, and enter the
correct code.
‘As delivered, Prb = 0, that is, the Security Code is not operational. I desired, the code can be left a this
‘0 that access is available without a code. itis convenient o do this during commissioning, and to assign
8 security code after the operating parameter settings are satistactory.
512
©D75-750
OPERATING PROCEDURES
5.4
Modes of Operation — Logic Diagrams
541
SA2
543
54.10
5411
S412
5413
SANS
‘Speed Reference
Torque Reference
Reversing
Starting
Stopping
Reset
Trip
‘Speed Loop
‘Acceleration
Deceleration
Voltage Loop
DC Link Voltage Controt
Digital outputs
Serial Communications
Page
514
515
515
516
516
517
5-18
519
5-20
5-21
5:22
5-22
5-22
OPERATING PROCEDURES CD75-750
COS PRESETS
Ee
Ca eet
rp Vota
bal -r0¥] ov [-10v
7 ats
O[-Prt]2Pr0 | «Pri
SET SPEED
UF hay raises SP
bynctment:
Bown coy
Socroses
nput Curent
bi oma [amazon
[a20lct wp] Pre] Prt]
[20.4] Pri| Pro]
t= Ter]
Bat Booed
————
REVERSE
‘rout Stone
SPEED SE} Pon Gules
(thou drecton) )
Input 9 Contel Loops idinament SP
®ve PS | >——__——
‘Ato A
— cele, 77 Parameter must =1 to have affect
At [D>—Communications input !
Intemal egic function “parameter must =0 to have oflect
w
| 12] a11 | Ato] ps"
oO 0 o | 00
o}fo 1} oO
0 1 0 | 02
oO i 1 03.
[+o [| 04
1 0 1} 05
1 [1 To [6
afi [ito] 7 P7,
0 = eternal contact open clu
Tettenalcomatebea oy |||
2 | Ps
Nore “In the configuration, p
‘The dive is assumed to be running. forthe the eve wuss ony PRESET
speed reference inputs shown above apan source of. speed ma ‘SPEEDS
ftom JopPreset;forthese the drive must be felerence thar e
3 cumently vad. = =
|
5. SPEED REFERENCE -wfeve| fd¥] PRESETS
$14
CD75-750 OPERATING PROCEDURES
CURRENT
thar
Pra CURRENT TORQUE
‘LIMITS SET POINT
TORQUE
‘rout o Moemonic TP
010 +10V only”! in Stat con
Tap Out input
aR a Contra Loops)
sow | ee
Word TP
NOTE
10 i input is open-circuit.
FWDREV
‘osed
FWOREY
key pressed
‘2 Keypae
LE
eWDor REV
recta /ERSE
‘NeGaTv ca
Wor SF fhe BaD)
‘ ve ramps”
negATVE down to zero and
Upto reverse set
and back
zantin FWD
in FWD)
So CEB
‘at Control Pod
is exinguished
Preset Spaod
negaTVE
+ ACCELERATION Pr2 oF Pr30-87 If using a Preset/Jog
cee eae
515
OPERATING PROCEDURES
External
select
‘Jog’ (closed)
External RUN
[contactor closea|
momentanly
Word CW
bit 0 = 0
momentarily
RON
rected
ioypad
Drive RESET
‘and rue
prot to TAP
230
ER
‘spplied
‘S.44— STARTING
DISCONNECT
Mains
‘Supply
External STOP
‘contact open
‘momentary
Word CW
bit <0.
momentarily
res
a Keypad
075-750
RuwsTanT|
‘and NOT
‘tipped
‘STOP MODES
[Standard ramp
|Coast to rest
Inject de braking
High level ramp
=e-eG
CD75-750 OPERATING PROCEDURES
(O— control terminal 4
Communications input ~~
Parameter must =1 to have effect
tena or Remote parameter ‘must =0 to have effect
517
‘Heep eRerER RM: He agp ec sntee we PD ngs
OPERATING PROCEDURES 075-750
‘Trip cannot be reset.
Drive hardware] Power off and on tory to reset. >CEE]
power-on
Inverse time
(integrating b =
See] — oper
Dive heat
eaten >{LoH
TIP
Instantaneous
es > ge
om k re provtoe
anna ly
DC bus
indepen pd ae
‘overvolage Lio RESET acon
Drive frst ramps down to zero speed,
Pe displaying ACUU, before tripping
sat >F
Powtaut
See
gto
i, [eineesaeeaseP EE
DC link
Drive frst ramps down to zero speed,
Ac nga | sesins A006 See as
ts = > Ue
5.47 — TRIP
518
D75-750
SPEED
SET POINT
(without direction)
(Diagram 5.4.1)
I
OPERATING PROCEDURES
'O—Contro! terminal
9
® LED on Control Pod
Parameter must =1 to have etfect
twat jor Remote —Rsunmaton Point
Diagrams 5.4.9/10.
‘Accel. Decl,
SKIP
FREQUENCY
FUNCTION,
"Current Limit
‘ative’
Jonas
‘compensation
Pr? (SU)
‘Max contin.
ccurent
Ps (TH)
ENCODER
input
shen bo
(witout drecton)
Load.) signal |
FREQUENCY
is
ELECTRICAL
FREQUENCY
(with direction)
(ac)
519
B00 4 i
remap emg
CD75-750
OPERATING PROCEDURES
DECELERATION
i
&
3
Bl llltles
a alels/e ul 3
eto 7 E
cece
z
5.4.10 — DECELERATION
5:20
CD75-750 OPERATING PROCEDURES
9
©—Control terminal 77 Parameter must =1 to have atfect
Imeral logic Function — sumtin Point
"Boca 18 boost
taper proven
vohage exceeding 8.1% at z0r0
fegulncy
ACTUAL
ELECTRICAL
FREQUENCY
(with direction)
(ac)
{ibd or torque signal}
peSrom debus
OUTPUT,
VOLTAGE
;________—»| when overtiow/
IxtTRIP
OPERATING PROCEDURES CD75-750
9
O— Controlterminal ——-—_-"_Parametor must =1 to have elect
LED on Control Pod —Q)semaon point
| Postve error |
‘eater than
set level
i
DC Bus 1
Vohage
Measured 01 Ramp down to
}->)2000 speed then
Teen
Ramp down to
12010 speed then
TRIP ACUU
(5.4.12 — DC BUS VOLTAGE CONTROL’
ACTUAL,
ELECTRICAL
FREQUENCY
(with direction)
(acy
terminals
28
“Oi message format
Paty bit set (610)
Baud rate set (612) ve lo
‘Serial Address correct = only
£85 set in Pr9 (Word SE) nerropation
FS. BD conn
{|p om
me
biO=1
Terminal
16= Dive wil
—_—____ 2
REMOTE m7 eta
‘5.4.14 — SERIAL COMMUNICATIONS
522
CD75-750
PARAMETERS
6 Drive Configuration
Parameters
AAT TTT
61
6.2
6.3
6.4
Parameters and their Functions
Operating Parameters
Bit Parameters
Parameter Quick Reference and Setting
Record
or
CD75-750 PARAMETERS
6
Drive Configuration Parameters
6.1 Parameters and their Functions
Paramoters are the means by which the operating characteristics of a system are controlled and
‘monitored. The two principal kinds of parameter of a digtal drive are the operating parameters and the bit
parameters.
Operating parameters have a real-value range, for example from 0 to 150%, and take the place of variable
potentiometer setings
Bit parameters take the place of the links as used in analogue drives for selecting different contro
‘configurations and are ‘sither-or functions.
‘The response of the drive and the motor depends fundamentally on the set up of the drive parameters:
(designated by the intials Pr). These values are accessible through the keypad, and addtionally by
signals through the serial communications link from a host computer, a terminal, a programmable logic
controller or ther communicating device,
‘The operator can read the value or state of any parameter, so all parameters are ‘reac! parameters. Those
\which the operator can change are called ‘write’ parameters. Some parameters are therefore known as
‘read-write’. The rest are ‘read only’. Read-write parameters can be adjusted in any sequence and
‘changed as desired.
Operating parameters can be adjusted while the motor is running. Bt parameter adjustment requires the
‘motor to be stopped and the display to show rd, oF to be tripped, whan the display will flash the Trip
‘Code indicating the condition,
‘No parameter can be adjusted to a value outside the operating range of the drive, and all are limited to
safe levels of inverter operation,
Al parameters can be allowed to remain at their default values, or as sot atthe factory during final test, or
‘can be adjusted in any sequence to suit specific applications. Default values are settings to which all
‘parameters can be caused to return at wil.
63
PARAMETERS CD75-750
64
6.2 Operating Parameters
Parameters are listed in the sequence which they appear In the keypad lisplay when the UP key is
Used following one press of the MODE key.
Parameter: Pro
Minimum frequency: The lower limit of inverter
output frequency, determining the
‘minimum speed of the motor.
Oz < Pro.< Prt
oz
MN
Prt, pr20- 26, Pri0- 12, b14
NOTE Adjusting PrO may alter the Preset Speeds and the Skip Frequencies —
Preset Speeds — Pro < Pr20- 26 < Prt
‘Skip Frequencies —PrO s Pri0- 12 Pri
‘The © 10 +10V range of the extemal vottage reference Viq (terminal 5) operates on the difference between
Pr0 and Pri. For example, if PrO = 10, the inverter output is 10Hz when the minimum speed reterence is
OV. 1 Prt = 50, say, then when the speed reference is SV the output frequency is —
v
Pri-Pro) x Me} + Pro
te »* aay)
(50-10) x (S +10) = 30H
Pararneters PrO and Pr1 apply to both forward and reverse operation.
Parameter: Pri
‘Maximum frequency: The value of speed in Hz above
which the motor is not 1o operate.
Range: Pr0.< Pri < ULF (Refer to b14 for information about ULF)
Detault value: SoH
Sorial mnemonic: MX
Rolated parameters: Pri, pr20- 26, Pri0- 12, b14
NOTE Adjusting Prt may alter the Preset Speeds and the Skip Frequencies —
Preset Speeds — Pr0 s Pr20 - 26 < Pri
‘Skip Frequencies —Pr0 < Pri0- 12< Pri
CD75-750 PARAMETERS
CHANGE-OF SPEED RAMPS
Provision for controling acceleration and deceleration has three objectives — to serve the many
applications where abrupt changes of speed are not acceptable, to limit current demand during any
upward speed change, and to limit DC link voltage during a downward speed change.
Deceleration time is set by parameter Pr3 which has a range from 0.2s to 600.0s, Fig. 26. The etfect of
deceleration time is, however, not exactly analogous to acceleration time, even though the two
characteristics shown in Figs. 25 and 26 apparently have much in commen.
‘When the frequency of the supply to an induction motor is reduced while its rotating, slip takes a negative
value, In effect, the motor becomes a generator and retums power tothe inverter. To some extent, this power
can be absorbed by the DC ink capacitor and by losses within the system, but the DC votage cannot be
‘alowed to rise without risk of damage to drive components. The DG link protection logic is not adjustable.
11s found that a chosen deceleration time causes the inverter to trip and indicate a DG link overvokago,
‘ther the deceleration time must be increased or, if this is not possible due to the needs of the driven
system, the optional dynamic braking unit will have to be utilised to absorb the excess energy. This
‘altamative is discussed further in Chapter 9 “OPTIONAL BRAKING UNIT”.
Parameter: Pr2
‘Acceleration time: The time to accelerate from OHz tothe selected value of ULF: determines
the slope of the acceleration ramp. (Refer to b14 for information about
ULF)
Range: 0.25 10 6008
Defaut value: 50s.
Serial mnemonic: AL
Rotated parameters: Pr3, b14
Acceleration time is set by parameter Pr2 which has a range from 0.2s to 600.08. The actual time to
‘accelerate from any speed to any other is then a linear proportion of Pr2, Fig. 25. Acceleration limits are
imposed by the maximum and minimum available values of Pr2 and by the chosen valve of ULF (14)
Parameter: Pr3
Deceleration time: The time to decelerate from the
ssolacted value of ULF to 0}
determines the slope of the
deceleration ramp.
0.2s to 6008
10.08
Pr, bia
ue
cea ' 1. '
Range of P2———" Range of Pr3———=.
25 Acceleration Time Pr2.The time t to 26 Deceleration Time Pr3. The time t to
‘accelerate from 11 to 12 depends on the decelerate from 11 to £2 depends on the
aloe selectod forthe ULF as wal! as for abe solctd ortho ULF as wel a or
6s
PARAMETERS
66
CURRENT & PROTECTION
‘An inverter is usually selected with a maximum continuous current rating to match that of the motor. To
prevent overheating at ful load the motor full load current (FLC) rating must not be exceeded. The
‘continuous current limit is parameter PrS and its value isthe ratio of the motor rated FLC to the inverter
FLC, expressed as a percentage —
Pr5 = (motor FLC /inverter FLC) x 100
PrS is the lower threshold of the inverse time-current protection of the motor and its cabling. Any current
value in excess of PrS when integrating in the Ix t region is signalled at the keypad display by flashing of
the unused decimal points in the display and will, if sustained, result in tripping of the inverter. Curves are
shown in Fig. 28.
‘Trip time = kx PrS / (actual % current - Pr8) in seconds,
where k= 25.7 for Industrial or HVAC drives
‘A short acceleration time combined with a high inertia load may demand a current higher than the
‘maximum continuous current PrS and the current is likely to enter the 1 x t inverse time protection zone.
Only i the drive were grossly under-rated relative to load inertia or if the current limit (Pr4) were set low
‘would there be a likelihood of an overload trip during acceleration,
‘The drive logic recognises threa levels of high transient curent above the current limit Pr4, such as might
be caused by severe shock loading, or by short circut or earth faut in the motor or cabling. The logic
responds to transients protecting the motor, the cabling and the drive by shutting down the inverter IGBT
bridge.
The speed of electronic fault detection is greatly superior to the performance of hre fuses.
Note thatthe intemal current imit fs scaled by the torque reference inout (terminal 7) such that —
Ve
Internal current limit = (Pra x —©) + 10%
iov
Parameter: Pré
‘Timed current limit: | Maximum level of inverse time-current overload.
Range: PS < Prd < 1S0%FLC for Industrial rating drives
PrS § Prd < 120%FLC for HVAC rating drives
Default values: 150% FLC for Industrial rating drives
120% FLG for HVAC rating drives
Serial mnemonic: = TR
Related parameters: Pr8, Terminal 7
Parameter: PrS
Max continuous Percentage of FLC at which current can be supplied continuously;
currant: threshold level of timed current limit
Range: 10% to 105%FLC, and not greater than Pr
Detautt value: 100%FLC.
Serial mnemonic: = TH
Related parameters: Pra
©D75-750
(CD75-750 PARAMETERS
DEVICE LMT
INSTANTANEOUS.
TRIP REGION
‘Continuous current Prs
t(sec)
27 Overeurrent protection by internal electronic monitoring.
Protection curves according 10
setting of PrS (%4FLC of drive)
150% FLC
120% of rated}
FLC of drive = fee
100% of rated titel a
FLC of drive
1 30 180 ‘{sec)
28 I xt characteristics (not to scale
67
PARAMETERS CD75-750
TORQUE (VOLTAGE) BOOST
Parameter: Pr
Voltage (torque) Maximum level of voltage boost
boost at 2010 frequency.
Range: 0 to 25.5% of main supply voltage
Detauk value: 51% 0
Serial mnemonic: 80
Related parameters: b3
When the boost value (Pr6) is sot high, the profile below a frequency of one-sixteenth of Pro assumes the
gradient of constant Vf provided thatthe line wil intersect the OHz axis ata value of 5.1% of mains supply
voltage or loss. Otherwise, the intercopt is made at 5.1%. Ifthe chosen value of boost is ow, the gradient
of boost values is constant (refer to Fig. 29b).
It le best to choose the lowest effective degree of boost as too high a value may, when starting the
‘motor, result in stalling. For this reason It Is recommended that Pré should be increased in small
‘steps from a low vaiue until the motor starts Smoothly and with minimal hesttation.
‘When AUTO boost (b3 = 0) is selected, the inverter logic applies a boost increase proportional to the load
demand as a percentage of the chosen value of maximum continuous current PrS. The applied voltage
boost is therefore given by —
neo
I, for example —
the selocted value of Pré is 10%
the selected value of PrS is 100% FLO.
land the actual oad demand is 47% FLC
then the applied voltage boost is —
tox fF 47%
‘This is tapered trom 4.7% boost at zero frequency to 50% of MVF (ie at 0.5 x Pre).
iz
2
ae
Normal
Varatio
16 2
2 (torque) boost
(eh {vel of boost, tapering to 5.1% at OHz. Note that
1G maintained st high level above a frequency of
‘one sixteenth of Prc.
{@) Low level of boost — tapers avenly from boost setting
‘when boost is <5.1% of rated voltage.
68
CD75-750 PARAMETERS
SLIP COMPENSATION
Slip compensation compensates for speed varied by increasing load due to the slip characteristic of
‘squiral cage induction motors. Wis applied by parameter Pr7, Fig. 30. In open loop mode (65 = 1) Pr7-
increases the output frequency of the inverter to a value above the frequency demanded by the speed
reference. In closed loop mode, (b5 = 0), Pr7 has no etfect. The available values of sip compensation
ee
ULF | Available Range Maximum
He of rT Compensation
720 Oto SHz 7.8Hz
240 Oto toHz 15.2H2
420 0t0 20H 30.3Hz
960 00 25Hz eo.sHz
‘Tne amount of compensation applied is dependent on the folowing factors —
+ The valuo of ULF solected
+The value of Pr7 selected from the available range for the ULF
+The actual oad as a proportion ofthe selected value of maximum continuous current PrS.
For example, if the ULF is 120Hz and Pr is sat to SHz, then when tho motor is drawing current equal to
the selected value of PrS the compensation will be 5.0H2. If a lower setting of Pr7 had been selected, th
‘compansation would be proportionally lass atthe same load current. In any case, at loads below the value
‘et in PrS the compensation i proportionally lass.
For good compensation, PrS should be set tothe value of the moto fll load current, and Pr7 adjustod to
the slip frequency of the motor.
Slip compensation apples in both forward and reverse oparation and gives near-constant speed holding
with fluctusting speed and load.
Compensation in Hz = Pr7 x 4238
Paramater: Pr?
Slip compensation: Increases inverter output frequency as load increases; scaled by the ratio of
‘actual curent the selected vaive of Pr5, up tothe frequency increase selected.
Range: Oto SHz — ULF 120Hz
Oto 10H2 — ULF 240 Hz,
Oto 20H2 — ULF 480Hz
Oto 25Hz — ULF 960Hz
Osfauit value: oH
Serial mnemonic: SL
Rolated parameters: BS, b14
Js0 Sip Compensation Pr7
increases
reguency ‘cording to
‘Compensation may be
selected within the’
69
PARAMETERS
INJECTION BRAKING
Parameter: Pro
Injection braking: Maximum level injection braking curre
percentage of rated FLC.
Range: 40% to 150%FLC (Industrial) or 120% FLC (HVAC)
Dofaut valu
150%FLC for Industrial Drives:
120% FLC for HVAC Rated Drives
Serial mnemonic: BR
Rolated Parameters: 62, b7
NOTE — Injection braking is operational only when the drive is stopping and when b2 = 1 and b7 = 0
6-10
Value of Pre
Minimum — Maximum
40% of FLC 180% of FLE
fp
a Il : :
kK aie tegom
jon braki
31 Injecters tinea relationship of the assigned value of Pr8 tothe braking
9 ape
NEG} “The effect of a STOP command, which cai
‘1 Buced ineary to ero at ful requencyYolowed by:
{G) injection of braking current at tow frequency for @ period which is
{a ghdent on the inersa ofthe load:
yine Raking trgue ime, 16
G2 eMalue of the os holng torque (8) s a proportion of Pr.
The braking current level (4) is determined by the
the voltage to be
lve of Pre.
CD75-750 PARAMETERS
SERIAL ADDRESS
Parameter: Pro
Sorlal address: Identifies the inverter to enable
‘serial davice to address a solected
‘rive in & mutiple drive system,
Range: 01099
n
SE
6, b10, biz
FAILURE MODE (MEMORY)
Parameter: Pra SERIAL
MNEMONICS
Failure Mode Contains the last 10 tp Pr-O = TO
Parameter: codes saen by the drive Prat oT
‘Does not hold UU it the PrA2=T2
dive was in a tripped PrA3 = 13
‘tate during power down. Prag = T4
Holds the last 10 trip PrAS = T5
‘codes even when power PrAS=T6
disconnected. PAT = 17
PrAS=T8
Range: PrA-O last trip to PrA-9 previous PrA-D = T9
tenth trip
Detaut: PrA-0 to PrA-8 Blank
Data Logging
‘The drive can be interrogated for the history of faut tips for logging and for system analysis. The software
saves the most-recent ten trips. Data is read-only, and is not lost when power is disconnected from the
drive, The procedure at the keypad is as follows —
Find PrA in the main menu, Press the MODE key to go into parameter adjustment mode. The display
will then show the code of the most racent trip in the windows to the right-hand side of the
display. The left-hand window will show 0, the log sequence number. To view the codes of sarier
tips, press DOWN to view in sequence, 0 to 8, or UP to view in reverse sequence, 9 to 0. After
power-up, the starting point wil always be 0. (NOTE The minus LED also illuminates for log sequence
fumbers 1 through 10 9.) I no keystroke is made, the display reverts to the main menu after 8
seconds.
SECURITY CODE
Parameter: Prb
‘Security code Permits choice of the
selector: ‘security code for each
individual inverter. Prb = 0
‘corresponds to no security
. ‘code. In keypad adjustment mode,
values of 100 to 255 and zero can
bbe sot. in serial comms control
‘mode, values of 0 to 255 can be set
Range: 010.255,
Detauk value: 9
Serial mnemonic: SC
(Once the Security Code has been correctly entered, all paramters can be adjusted. The code needs to be
entered only ones to allow access to all parameters after power-on, until the drive is powered ot.
en
PARAMETERS (CD75-750
VOLTAGE/FREQUENCY PROFILE
‘The vottage-io-frequency ratio (VA) dalivered by an inverter is normally held constant up to the maximum,
(rated) voltage and frequency of the motor — the base speed. Up to this point the motor torque is, in
principle, constant. Above base speed, where the voltage can no longer increase, further increase of
frequency output produces a constant-power characteristic.
The value of the frequency to be assigned at the rated voltage of the motor is called the maximum.
voltage frequency (MVF) and is adjusted by parameter Pre. The MVF is defined by relating Pre to the
selected value of the upper mit of frequency (ULF), parameter b14. The maximum value of the MVF is:
‘equal to the ULF (Pre = b14). The minimum valve is one-sixteenth of the ULF. and when ULF = 960Hz
tha maimum value of MVF is 60H2.
Datines the lowest frequency at which the invertor
Pri speed
bi = 204
20mA =» PrO speed
4mA = Prt speed
bi = 020
OmA => PrO speed
20mA => Pri speed
vu
uu
Baud Rate Selector
Parameter: b12
Baud rate selector:
4.8 = 4900 baud
9.6 = 9600 baud
Detaut valve: 43
Serial mnemonic: 05 (locaton Qin the 2-bye hex word)
RRolated parameters: Pr8, 6, b10
622
CD75-750 PARAMETERS
Reset Defaults
Parameter: b13
Reset parameters to
default values:
0 inactive
1 = sot defaut values
Default value: °
Setting b13 = 1 affects ALL parameters.
Define Vatues of PWM and ULF
Parameters: b14
Define PWM switching frequency and ULF
First entry — PWM switching frequency - 2.9 = 2.9KH2.
59=
‘kHz
‘8kHz
ANT = A-Tkz
‘Second entry (press MODE once) — Upper limit of frequency (ULF)
120 = 120H2,
240 = 240Hz,
1480 = 480Hz
1960 = 96042
Press MODE a second time to exit.
Defaut values: -PWM 2.9kH2
LF 120Hz
Sotial mnemonic: Fa
NOTES
(When a switching frequency of 2.9kHz is selected only 120Hz and 240Hz ULF are availabe.
ULF of 960H2 is available ony with 11.7kHz.
(i) Atoring 614 can affect Pr0, Pri, Pr7, Pre, Pri0— 12, Pr20— 25,
FREQUENCY RELATIONSHIP
‘The ULF, the maximum frequency Prt, and the minimum frequency PrO are related as foliows —
OlHz ¢ Pro < Pri < ULF
FREQUENCY RESOLUTION
Ot 120Hz = oLtHz ULE = 120Hz
Ot 240Hz = O2Hz ULF = 24oHz
Oto480Hz OAH ULF = 480Hz
Ot960Hz Oz ULF = 960H2
PWM SWITCHING FREQUENCY
Selected by parametor b14 (fist entry) — alternative values are displayed by repeated operation
of the UP or the DOWN key.
In makag a choice of PWM switching frequency, the factors to be considered are the effect on the motor
performance, and the relationship to the upper limit of inverter output frequency (ULF, see below). Lower
PWM switching frequencies improve motor torque al low speed, keep heat losses to a minimum, and
‘would be preferred for applications involving high-inenia loads, repeated acceleration, of frequent start-
‘Sop duty. The higher switching frequencies reduce torque ripple and acoustic noise, but increase losses
‘due to inverter heating.
Parameter b14 also enables the ULF to be adjusted as a second entry, see below. To leave PWM
‘switching frequency, without altering the ULF value after adjusting the PWM value, press MODE twice
instead ol once. canine.
623
PARAMETERS CD75-750
UPPER LIMIT OF FREQUENCY (ULF)
Selected by parameter b14 (second entry) — integer values of 120Hz, 240Hz, 490H2 or 960HZ
are displayed successively by repeated operation of the UP or the DOWN key.
‘The ULF is the highest frequency of the inverter AC output sinewave. As the behaviour of other control
functions is dependent on the ULF value chosen, it is convenient to sclect @ value at an early stage. The
‘main reason for choosing one ULF value rather than ancther wil be, primary, the required value of Pri
and Pre.
ULF ig adjusted by bit parameter b14 as a second entry after setting the PWM switching frequency. iis
necessary to press the MODE key once again, after it has bean pressed to set the PWM switching
frequency, and then to enter the ULF vaiue, finally pressing MODE once more to exit b14 adjustment. To
set the ULF without entering a value for PWM first, press MODE twice after adjusting the parameter code
to b14,
‘Special Function Parameters
Prd=20
> Function Sorial Mnemonic Detaut
20 Select jog and 3 preset a 0 =/og and 3 presets.
‘speeds or 7 preset speeds (location 8)
21 Standard or selected a 0 standard
preset, acceldecel rates (location 9)
22 Preset speed, reverse co = terminal
source, keypadnerminal (ocation 7)
BIT-PARAMETERS b20, b21 and b22,
Related parameters Pr20— 27, Pr30— 37, Pr40— 47
Preset Speeds ara further controlled by two bit parameters, b20 and b21, in the menu Prd = 20, as
folows —
1. Bit parameter b20 = 0 (default) enables only terminals A10 and A11 for Preset Spoods. In this
mode, Prasat Speeds 1, 2 and 3 are available, with Jog (otherwise called ‘inch’, meaning that the
motor is under momentary on-off contro). The Jog facilty is controled by applying OV at terminal
‘A12 so that terminal A12 becomes a Jog control
Only from rd¥ will the drive run at the set Jog frequency (Pr27) for as long as terminal A12 is
connected to OV. The acceleration and deceleration rates of the Jog operation are always
controlled by Pr37 and Pré7.
2 Bit parameter b20 = 1 enables terminals A10, A11, A12 to control seven possible Proset
‘Speeds. Thare is no Jog facilty in his mode.
3. Bit parameter b21 = 0 (dafaut) puts Pr2 and Pr3 in control of acceleration and deceleration, for
presets Pr20— 26.
4 Bit parameter b21 = 1 enables the individual profiing accelerations and decelerations available in
menu Prd «30... and = 40.
Pr20 uses acceleration Pr30 and decoleration Pra
Pr2t uses acceleration Pr31 and deceleration Prt
at.
‘5 Bit parameter b22 = 0 (defaut) enables reversing of preset speeds to be controled from terminal
117 while the motor is running. The polarity of Pr20— 26 is ignored,
6 Bitparametor b22 = 1. The direction of rotation of preset speeds is preset by parameters Pr20 0 Pr26.
6-24
075-750 PARAMETERS
Prd = 50
b Function Serial Mnemonic, Detaut
50 Drive healthy/t speed relay 1 0 = Drive heathy
ralay (location 10)
51 Disable or enable fwdrov ce = Dieabie
kay on control pod (ecation 11)
52 Disable or enable catch co = Disable
spinning motor software (location 12)
53. Runvminimum speed o (= Drive running
status output (cation 13)
54 Fixed or dynamic vf ratio 1 0 fixed vit ratio
(location 14)
NOTE
(On all COV drives the following detauits wil ator.
Drive Healthy = not tripped and notin Err condition after power on,
‘AtSpeed «indicated speed equal to set speed.
1852 spinning motor = 1 enabled
6 dynamic vf = 1 dynamic wf enabled
BIT PARAMETERS bS0 to B54
50-0 Status relay indicates (detaut) Drive Healthy when energised (terminals 1,2, 3)
b50=1 Status relay indicates A-Speed when energised (terminals 1,2, 3)
bS1=0 DISABLE keypad FWD/REV key (default) ) Relevant only in keypad
bSt=1 ENABLE keypad FWO/REV key mode, b8 = 0
NOTE When bS1 = 1, terminal 17 controls motor drection when b9 = 0
b52.=2.0 —Notcatch spinning motor detaut)
b52=1 Catch spinning motor
Enables the drive to be energised onto a motor whose shaft is rotating, without causing a trip. On
receiving a RUN signal, the drive scans the motor frequency and synchronises at the values. The drive
‘scans from Prt to zero in the last direction of rotation, then from Pri to zero in the opposite direction.
‘Once the drive synchronises at the motor speed, it then ramps to the set speed.
During the scanning period the keypad displays SCAN. On systems where thera is no mechanical load on
the motor when it is over-running, a change of speed may be observed during the scanning
‘operation. Dependent on the systam and the dynamic conditions, there may be a delay of up to § seconds.
bolore the drive resumes normal operation.
253-0 Open-collector output = (default) Drive Running | Terminal AO
53-1 Open-collector output = minimum speed Extemal relay energised
NOTE—- Drive Running = IGBTs being switched inthe inverter bridge,
Minimum speed = Quput frequency greater than PrO and IGBTs being switched
625
PARAMETERS CD75-750
Fixed or Dynamic Vit Ratio
B54 = 0 FIXED VA ratio (default)
B54 = 1 DYNAMIC VA ratio .
Provides the option of load sensitive voage response, with energy saving and reduced noise at light
loadings. At no toad, the applied vokage is 50% of the normal full vokage. As the load increases the
‘applied voltage increases in proportion, to a maximum of the normal voltage at full load, Auto boost and
fixed boost (b3) and Pr6 function as for a higher value of Pre.
FRED Vivato, 654= 0) [DYNAMIC Virati, B54 = 1
tect Pre when BA»
(2-212) re when
load is < Prs.
When load 2 Pr5, efective Pre = Pre
35. In dynamic VA mode the Vl ratio is proportional to load. (Not to scale)
6-26
CD75-750 PARAMETERS
6.4 Parameter Quick Reference and Setting Record
Parameter Facey Feschage ‘Second Charge
Deteut sates ‘Dao Sorby Dam Satby
Po |eeatewmrey [ote
Prt | Max trequency | SOHz
Pr2 | Acceleration time | § seconds
Pra | Decelaration time | 10 seconds
Pet | Current timit 150/120% FLE
Pes [Max contin txt | 100% FLC
5.1%
oltz
Ps | DC braking level | 150/120% FLC
5 a Co a
xs eae ae
Soc
ea ae os
Tres | rane noae [eee
Pras | Failure mode Blank
Pra-S | Failure mode Blank
|OpeniGlosed loop
anve |_|
MasterSlave master
b7 | Stop mode with b2 | 0 = standard ramp
re
bo | Torque or speed | 1 = speed
bi [Arena san [ = manal
pe
bo _[asotasdteon [or ase
be [unenaret —[reunsour |
bs
.
Fat Charge
‘Second Change
‘ate Sat
bie | Pw 2a
bie | ULF 20H2
Pre | MVE soHe
50 | Menu access
Pri0 | Skip frequency 1 | oltz
Prit | Skip frequency 2 | oftz
Pri2 | Skiprequency 3 | oft
Prt3 | Stipiteg. band 1 | £0.5H2
ria | Skipireg. band 2 | 20st
Preset speed 7
227 | Jog speed 15H
220 [presser [onpgancs | |
3 presets and Jog | presets
Ba | STOpreser T= sandard
ramps
b22 | Preset speed Ow torminal
reverse source
4 reverse sou
Bia] Menu access
PO | Preset 1 accel, | S seconds
Prat | Preset 2 accel. | S seconds
6-28
CD75-750
Seca
CD75-750 PARAMETERS
Pr33 | Preset-4 accel, _| 5 seconds
Prad | Preset S accel. _| 5 seconds
Pras | Prosot 6 accel. | 5 seconds
Pra6 | Proset 7 accel. _| 5 seconds
og acest, 0.2 seconds
Pra0 | Proset 1 decel. | 10 seconds
Prat | Preset2decel.__| 10 seconds
Pra7 | Jog decal
36%50| Menu access
Reset attempts | 0
Reset delay 1 second
Drive heathy’ | 0 = drive heathy
at speed relay | relay
Prs0
Pst
50
bst | FWDREVKey — | 0 disable
bs2
53
bse
disable
Spinning motor} 0 disable
Runmin speed | 0 = drive
Status output unning
Dynamic WF or | 0 = fixed VIF
fixed VIF
NOTE — On all CDV drives the following detauts wil ater:
'b52 Spinning motor = 1 enabled
'b54 Dynamic VIF = 1 dynamic V/F enable
629
(CD75-750 DIAGNOSTICS
7 Diagnostics and Fault
Finding
7.1 Fault Finding
7.2. Control Pod Trip Codes
7.3. Healthy Indications
4
DIAGNOSTICS D75-750
72
7
Diagnostics and Fault Finding
7.1 Fault Finding
DISPLAY doos not illuminate and drive does not run
‘CHECK control pod is connected to drive module
‘CHECK mains supply, supply fuses or circuit breaker
Replace supply fuses if blown, or reclose circuit breaker, but it supply fuses blow or breaker trips
again contact the supplier of the drive.
Weontrol pod is remote mounted, check extension cable wiring
MOTOR does not star, display shows rd¥
Drive is in MANUAL start mode,
Operate RUN key, or START pushbutton
CHECK the control wiring, and that external stop/rurvtrip contacts and circuits are in order.
MOTOR does not start, display shows 0.
CHECK wiring of speed reference, and that the correct mode (REMOTE/LOCAL) has been selected,
‘CHECK that KEYPAD mode is not selected.
Check praset speeds are not selected with dofault seting i.e. “O" Hz. Check max frequency parameter
{Pr 1) is not atthe “O° Hz.
FAULT CODE at display REFER to Operational Control for possible cause,
Note that:
+ Thermal rp devices should not be continually tipped and reset.
+ Oltrip can be caused by shock load, cable or motor insulation fauts, length of cable to motor 100
‘reat, or attempting o accelerate too large a motor.
+ Ol and OU trips may be caused by decelerating too fast:
when operating below motor basa speed — OI tip
‘when operating above motor basa speed — OU trp
Increase the value of Pr3 and check that b2 and b7 are set correct.
+ IPS or Err ae displayed, ty disconnecting the dive from the supply, wat 2 minute, reconnect
and run the drive. the faut persists, contact the supplier ofthe dive.
MOTOR fails to turn the load, and is noisy
Fixed boost setting too high (Pré). Try auto-boost also,
‘Also check the settings of current limits Pr4 and PrS.
DRIVE fails to respond to setial communications
CHECK loca/remote, mastor/stave (b6), parity (b10), baud rato (b12), and serial address (Pr9) are
set correctly.
(CHECK the wiring and termination ofthe serial ink.
DRIVE appears to be set to an unusable state
tthe security code is known—
Enter the securty code (Prb) to gain access to b13.
‘Set b13 = 1 to reset all parameters to defaut values.
I the code is not known —
the code can be accessed from the serial communications link.
Ht, after partorming any of the above checks, the drive still malfunctions, contact the
‘supplier of the drive for assistance.
CD75-750
DIAGNOSTICS
eee ree eee eee ne Eee ne
7.2 Control Pod Trip Codes
‘Any trip, internal or external, immediately stops the drive.
‘The IGBT bridge is no longer active, and the motor coasts to rest
Internal protection trips are always active and cannot be disabled
‘An extomal trip Et can be forced by the operator.
ob
eee
et
on
Ph
pee
uu
AcuU.
4/20mA current oop loss. The current has fallen to<3.5mA when b1 = 4. 20 or 20, 4,
When bt1 = 0.20 current loop loss trp is inactive.
Hardware fault within the drive. Occurs only at power-up. Is a lock-out condition — no
reset (power can be removed then re-applied).
External tip is operated by (terminal 12) or via the serial comms word CW. bit 4.
Integrating overload (bx) trip. The output current as defined by Pr4 and PrS has
reached the allowable time it
Hoat sink overtemperature. The heatsink has reached its upper safe Working limit due
10 loss of cooling air or cooling air too hot.
Instantaneous overcurrent tip. Excess currant towing inthe GBT verter biog,
‘caused by short circuit, low impedance earth fault or excessive shook
DC bus overvotage. Caused by main supply overvoiage (even ft momentary). or high
impadance earth faut, or excessive regenaration due toa high rato 0! deceleration
Can be caused by loss of one or two phases, or low phase voltage (<380V -15%).
Intamal power supply fauk.
Motor thermistor (f fited) impedance high due to sensing excess temperature, or
impedance less than 100R due to cable short circuit or similar
DC link voltage has fallen below the operating range. The drive trips instantaneously.
'ACUU willbe displayed when the input vols tothe drive falls 15% Below the nominal
value of balow the operating vokage lava (360V = 15%). The ciepioy roma ae tong
‘8 the condtion persists. The condition does not trip the drive running, but causes t
to ramp down to zero speed. f corrected before zero speed is reacted
ramp up to whatever speed raterence apples and operate normally. Ze speed is
_Teached betore the condtion is corrected, there will be a 15 seco"d delay and then
UU trip can also be caused by a failure of internal components of the tive
These conditions require expert attention. Please consult the supplier of the drive,
ealty hxScatons overeat
23
DIAGNOSTICS
CD75-750
74
7.3 Healthy Indications
rd¥
Numerical
value
displayed
de
inh
‘SCAN
Flashing
decimal
points,
Motor stopped, 4
Motor spoed (Hz) or load (%FLC) dependent on
the setting of bs.
(Get speed is cisplayed only in Keypad mode).
‘de braking active.
nergised.
‘Motor coasting to rest; IGBT bridge inhibited.
‘Spinning motor software is selected and the drive is scanning for the correct
‘motor frequency before catching the motor/ioad and taking them fo the set
speed.
This indicates that the drive isin the 1x t region,
CD75-750 SERIAL COMMUNICATIONS
8 Serial
Communications
8.1 Introduction
8.2 Fundamentals
8.3 Components of Messages
8.4. Structure of Messages
85 Configuring the Drive Through Serial
Communications
at
tees GS ERR sce RRR AR aaa La oc
SERIAL COMMUNICATIONS CD75-750
Unique drive
sorial addrass
* Terminate with
S485 MULTIDROP LINK FN2S resistor
ee cecetieee eres R = Receiver input
T= Transmitter output
36 Basic RS485 Serial Communications arrangement
‘and sora address. Unique kentty code for up 0 32
‘rives per communications port atthe host.
Receive } Transmit
Re
A
ow
23|c1} to
OV (pret) 01 Differential
GND from host twisted-pair cable
‘ransmiier
37 RG4BE oF S422 serial communicatrions _38_RS232_ serial communicatrions ink
Tink connections. Cable must be screened. ‘connections. Cable must be screened.
82
CD75-750 SERIAL COMMUNICATIONS
8
Serial Communications
8.1 Introduction
‘A communications link is standard in all CD76-750 and CDV7S-750 drives. it is a machine-machine link,
tenabling one or more drives to be used in systems controlied by a host such as a programmable logic
‘contrallar (PLC) or computer. CD75-750 and CDV75-750 drives can be directly controled, their operating
configuration can be altered, and their status can be interrogated by such a host, and continuously
‘monitored by data logging equipment. A host can operate up to thiny-wo drives, refer to Fig. 36, and up to
9 if ine buffers are used.
‘The communication port of the drive module is the four terminals 20 to 23, and the OV terminal C1. The
standard connection is four wire S485 or RS422, Fig. 37. Three wire S232 can also be used, Fig. 38.
‘The serial communications protocol used is ANSI x 328 - 2.5 Ad which is standard for many industrial
interfaces.
82 Fundamentals
Digital communications systems such as RS485 communicate by means of binary logic. Binary logic is
‘two state’, and is readily implemented by an electrical circuit which is ether ‘on” or “off”. The two diferent
states raoresant two distinct bis of data, either binary digh (bt) 0 or 1.
By fixing a time duration for each bit, a series of bits transmitied can be recognised by a receiver. Hf, &
‘group of bits contain the same number of bits k becomes possible to construct a variety of diferent
‘characters’ that the receiver can recognise and decode. A group of four bits has sixteen possible variants
= 0000. 0001, 0010, and so on to 1111. Each of the sixteen variants represents one ‘hexadecimal’
ccharacter-unit — the decimal numerals 0 10 9 followed by the six letters A to F — making 16 diferent and
distinct characters,
‘Two hexadecimal characters each of four bits, making eight bits in all are known as a ‘byte’. Each byte
‘can be used to represent a character of data
‘The character set used in CD75-750 drives is the ‘low’ American Standard Code for Information
Interchange (ASCII), comprising 128 characters. In the low ASCII set only 7 data bits are used in the byte
10 represant the charactors, refer to the Table of Control Characters overleat.
‘The first 32 characters in the ASCII set (hex 00 10 1F and the ‘space’ character, decimal 32) are used to
represent special codes. These are the Control Codes, each of which has a particular meaning. For
example, ‘stat of text’ is STX, and, from a keyboard, is made by holding down the Control key and striking
B once (ControbB). This is hex 02, and the actual transmission is the binary byte 0000 0010. The drive is
programmed to know that this character signals that a command will folow. The codes for the CD drives
‘are shown inthe table on page 8-5.
83
ee ee ibis ‘
SERIAL COMMUNICATIONS (CD75-750
‘Low’ ASCII Character Set
nex =, | O 1 2 3 4 8 6 7
let, Binary | 000 [oor | ov | or [soo [sor [uo | a
0 | 0000 | NUL | DLE ,,/Space,| O 4) @ g] P ol © ol Pie
Ty [oor [sow jfocr oft alt gl A os] 2 wn) 2 ol] 9 as
| 2 | oo | stx ,)0c2 41 * a) 2 2) B | R wl © of 6 0
| 3 joo ferx joes.) # 5) gf So] S wo] © wo] & ns
Ta [ow [eor .foce .] $ al 4 ol DP gl T a) 4 sol t we
5) 0101 | ENQ | NAK ) % oo) 5 gs) © og] YU os} © im] 4% av
6 [ono jack [syn fe af 6 al Fowl Y ol f ve] ¥ we
7 | ont PEL ET) we] 7 | Son] Mo] 2 10] ™ v0
[| reno BS FCAN A] Cg] 8 se) Hove] X asl ™ toe] © em
| Syed ii0o.iea | tertame | emalees ie lea |acSeaee |alee in oaee|Aalateell Yate
fa [rw | uF SUB |” sl 2 xm] 2 wf | soe] 2 rz
B fw [vt esc a] + gy) tm) K oe) © ol * aor) € oe
co [too [FF A) FS sl + ul < wl & wl) wel ! toe se
Vp Tar Por fos of sl = nl Mol) wl ™ sol) ces
E | 1t0 | SO 4) RS yi - gl > | N oe | " ao] 7 126
[re fu [se ws) Sal / wo] 2 | O mf — 6] 2 fae
CD75-750 SERIAL COMMUNICATIONS
Contro! Characters in CD75-750 and CDV75-750 Drives
Charsctor | Meaning ascilcode | Keyed
| hex — Control
Eo | ResotorEndot Transmission 04 D
EN — | Enquiy, interrogating the drive 05 E
st | Statottex 2 8
EK | Endoftet o c
ACK — | Acknowledge (message 06 F
accopted).
NAK | Negative acknowledge 18 u
{mdesage not under ood)
‘The components of all messages betwoen the host and a CD75-750 and CDV75-750 drive are formed of
ASCII characters.
Each ASCII character that is transmitted or received has a start bit prior to the 7 ASCII bts, a parity bit and
a stop bit. The 3 extra bits are necessary to synchronise data transmission and provide error checking,
‘The convention is that the start bit is a 0 and the stop bit a 1. The party bit is present to allow the receiver
‘of the character to check that the character is valid. The format (i, time sequence) of the ASCII character
‘shown diagrammaticaly.
‘Low’ ASCII character byte
‘stant ‘Seven data bits, variable Party | Stop
bt bit | be
0 | tsb | msb a
ast | 2nd ath | om | tm
be | be ba | bt | oe
ee ire
Each bits transmitted for a set defined time as indicated by the baud rate (i, bits per second).
as
SERIAL COMMUNICATIONS CD75-750
83 Components of Messages
CONTROL CHARACTERS
To conform to the standard structure of a message, the stages of a massage are signalled by control
characters.
Serial Address
Each dive is given a unique identity or addrass (Pro) so that only the drive that is addressed will respond.
For security, the format is that each digt of the two-digit drive address is repeated, thus the address of
dive number 23 is sent as four characters —
[lelale!
ee eer
Data Mnemonics
To identity which operating parameter a message relatos 10, the parameters are represented by a data
mnemonic, which is a simple two-character code. When data is being communicated, it is preceded by the
‘appropriate mnemonic. The data mnemonic follows the serial address characters.
Data
Data to be sent or requested occupies the next six characters after the data mnemonic. Data is handled in
‘wo diferent forms —
‘a8 a plain numerical value, or
‘as a Hax Code Word.
‘Most of the operating parameters of the drive, are numerical data, such as a value of frequency, load,
‘current, ete. For example, speed is given as frequency in the range +960.0 to - 960.0Hz. The value ‘S5Hz
in a reverse direction’ is sent as—
E lroulpedieaiealier|
ilelalelsle|
To enable the state of bit-parameters (and Pr8) 1o be transmitted conveniently, 2-byte and 4-byte Hox
Code Words aro used, 2s described fully under Hex Code Words beiow. Each byte decodes to describe
the status ofthe bit parametar in tal. Use of a code for this purpose enables blocks of complex data to
be handled quickly and economically and avoids long series of messages to cover the many bit
parameters.
Block Checksum BCC
To permit the drive and the host to ensure that messages from one to the other have not become
corrupted in transmission, all communications other than acknowledgements are terminated by a block
checksum character.
8.4 — Structure of Messages
INTRODUCTION
Host to Drive
‘A message cannot be sent to two or more more addresses simultaneously. If the same request or
instruction is to be sert to more than one drive, it must be repeated with the new address each time.
‘Messages from host to the drive are of two kinds —
1 requast for information (Reading data), or
a.command (Sending data)
Drive to Host
Massages from the drive to the host are of two kinds —
a reply to a data request, (see section “Reading Data’) or —
‘acknowledgement of a message. (see section "Sending Data")
86
CD75-750 SERIAL COMMUNICATIONS
Drive/Host Set-up
‘The folowing driverhost set-up is important to ensure correct and satisfactory communications. Each drive
requires & unique identty number, or serial address set by parameter Pr8. The baud rate B12, and the
party bit 10, require to be set to match the host. Data, drive status and the parameter set-up can be read
‘rom the dive in any mode, provided only thatthe drive is energised, and the above conditions met. To
‘enable the host io control the drive orto change parameter setings, the dive mode must have the above
sotings and be adjusted as folows:~
Four parameters are required to be set to enable operation ofthe Serial Communications Link —
+ Parity bit to be adjusted to suit the host
b10=0 even parity
bi0=1 odd parity
+ Baud rate to sutthe host
bi2-42 4900baud
bi2=96 9600 baud
+ Sovial adcress
Pro = 01099
+ Mosterslave selector tobe set as folows —
6 = 1 and terminal 16 in REMOTE mode (ie closed) it parameters are to be adjusted by
the host.
'b6 = 0 oF terminal 16 in LOCAL mode (ie open) allows parameters only to be read by the
host.
‘SENDING DATA (trom Host to Drive)
NOTE
ifthe data to be sent is one of the following:-
Driva Configuration DS
or PWM Switching Frequency FO
‘or Max. Voltage Frequency BS, or configuration C1
the drive must also be in the rd or tripped state, that is with the motor stopped or tripped.
“The formed of the command from host to dive i:-
Host command —
yS0t- address - start of text - mnemonic - 6 characters - end - BCC
1nded message to the drive is, for example, “change set frequency of drive number 14 10 47.6Hz
in reverse’, i would be sent as —
connec] nooness [eowrnos | ane conta
ee Pyle] em | sly] fe] ex | a
coma coms | | come |
“The drive will reply with an acknowledgement, either —
‘ACK it the message is understood (whether implemented or not), or
NAK if the message is invalid the data is too long, or the BCC is incorrect.
1a value sent is outside the limits for a parameter, the drive will set the maximum value.
Parameters which cannot be writen to are:-
'b6, b10, b12 and b13 (contained in DS), AC, LO, SE, SW, TO, Tt to T9.
bs biG ies
bia ssi habesesotn Niesedalvesilils
SERIAL COMMUNICATIONS (©D75-750
READING DATA
The format of a cata request message is —
Host request —
‘reset - address - mnemonic - end
For example, to tind the spaed sot point SP of drive number 12, send —
| contro.| appress | MNEM | CONTROL
OT Ts[e]2[s]e ENO
Contro-D | Control
The drive replies in the folowing form —
start - mnemonic - 6 characters of data - end - BCC
For example —
controt | MNEM DATA ‘CONTROL
sx |sfe|+|o] +] 2| ex |. |
Control | | conto
| (co)
The reply first confirms that the data sont is the spoed set point, SP; the six characters immediately
following give tha present sating in Hz. The first characteris either + oF -, 10 indicate direction of rotation;
the remainder is the numerical value — “forward at11.2H2" inthis exampla.
The host may new request more information by: (or starting a new request as described above),
Repeat Enquiry (From Host)
“The negative acknowledgement NAK (Control-U) sent by the host causes the drive to repeat the data sent
{for the same mnemonic. This process can be repeated as often as necessary by the host.
Next Parameter (Enquiry From Hos!)
To obtain data from the same drive for the next mnemonic in the mnemonic table (see below) send the
positive acknowledgement ACK (Contral-F). The drive will respond by transmiting the data relating to the
‘next mnemonic in sequence. Mnemonic sequence with ACK response is as follows:
‘SP TP & AC-> LD, MN, MX, AL DL, TR, TH, BC, SL. BR, SE, SC, SW, DS, FO, BS, CW, S1, $2,
'S3, B1, B2, 83, P1, P2, P3, P4, PS, Pé, P7, PJ, Ai, A2, A3, Ad, AS, A6, A7, AJ, D1, D2, 03, D4, D5, 06,
D7, DY, C1, PS, RN, RD, RC, TO, T1, T2, T3, T4, TS, T6, 17, T8, T9 -m SP (stan)
Invalid Mnemonic (From Host)
WY the host sencs a mnemonic which the drive does not recognise, eg XY, the drive will respond by
repeating back the unrecognised characters in a message of the form —
start of ext - unrecognised mnemonic - reset
Thus—
stm |x ] y| ET
contro controLD
88
©D75-750 SERIAL COMMUNICATIONS
BLOCK CHECKSUM (BCC)
‘To ensure that data received can be vetted, a block checksum is attached to the end of each command
‘or data response. The BCC is automatically calculated by the sending device (either host or drive) and is
" which
‘enables the receiving driva/host to decode them in a special way. This is best explained by an illustration
(of each of the above special mnemonics.
‘SE — SERIAL ADDRESS (2 Hexadecimal Digits)
‘Ths is a read-only parameter. To read SE for drive number 22, for example, send —
cot | 2] 2/ 2/2
Control
E| ea
Control
The drive wil ropy —
sx _| slel S]r]e] er |
contrat contro |
[eco
“The data following the > symbol is hex 16, which is 22 decimal, confirming the Serial Address.
SC — SECURITY CODE (2 Hexadecimal Digits)
tis possible to find or change the security code of a drive. I the drive address is 11, for example, send —
T
mye] ae
oto | obits
‘The drive will repy. tor example —
ax so]
|contots °))
CD75-750 SERIAL COMMUNICATIONS
The data following the > symbol is hex 57, which is 87 decimal
The security code for dive number 11 is 87.
A security code does not need to be ont
‘communications link.
9d to read or adjust any parameter via the serial
‘SW — STATUS WORD or provious trip words (TO - T9, note TO = SW) (4 Hexidecimal Digits)
This is a 2-byte hex value word (of four characters) which enables the status or previous trip indications of
the drive to be read, (tis read only). The four characters decode to indicate the status of each of the four
states —
RUN — LAST TRIP — ERROR — and the PrA Trip Codes
‘Thus, 1o read the state of drive number 11, send —
cor [t)*]t]1 |8 Jw] exo
Gonttot conte
Lit
‘The dive replies, for example —
sm |s]™ [>Jole|t|c] ex ] >
Control-B | Control-C}
LEI (eco)
‘The four ASCII characters following the > symbol are treated as hex characters and are further decoded
into their binary equivalents —
(0 — C000, £ — 1110, 1 — 0001, C— 1100
‘Comparing each character with the appropriate section of the Status Word table enables the message to
bbe translated as
first 4 trips ok — overvoiage tip — tripped status — set to run and drive ready (ie awating reset)
‘The format for TO - 79 is identical to SW with TO and SW boing identical, T1 gives the last but one trip
states, T2 gives the last but two tips states etc. and TS gives the previous tenth trips information.
ent
SERIAL COMMUNICATIONS
‘Status Word Sw (with example)
————
Flags and Trip Code
-———_°*
NOT USED
Dive over temperature
Motor ovortemperanure
x toveroad
| Corntsearay
Power supply faire
Undervotage ip
Overvatage ip
(dena) | 1
=.
Phase oes
Current 0p loss
| Error tag
| Tripped fag (etatis relay)
me
Fun fag, 1 set mun
| Pec tag, 1 ccvereasy
| notuseD
_—_
| Stats of trina: 16, 0 » LOCAL, 1= REMOTE °
Run / Ready States
‘Status Indicated
Drive stopping
Drive stopped and ready 10 run (rd)
Drive running
Drive tipped, awaiting RESET, and
“Trip Code flashing on the keypad display
CD75-750
‘ote that trip stags are held in PrA even ater a reset and willbe changed only by a subsequent tip. The
#9 conditions wil ripple through the TO to TB las tp storage registers. The trip tsal, however,
Continues to exist only #f the tripped flag (status relay) equals ‘aut’.
‘To detect an extarnal trip (PrA = Et), note that the tripped flag (status relay) indicates 1 while all other
indications and flags are ok — not faulty.
812
CD75-750 SERIAL COMMUNICATIONS
DS — DRIVE CONFIGURATION (4 Hexadecimal Digits)
This is a 2-byte hex-value word (our characters) enabling the state of bit-parameters bO to b12 inclusive
1» be read or changed. Parameters b6, b9, b10 and b12 are read-only and cannot be changed. The four
characters following the > symbol decode into binary states, in a similar way as for the Status Word, to
indicate tha value of the bit parameters. For example, to read DS for drive number 11, send —
cor | | ofa] a]o]s] eno
ControL conto e|
‘The drive replies, for example —
sm Jos] |>|e|rlel4] er | t
contro ial Controic|
| (eco
‘The data following the > character are treated as hex characters, and decode to binary as follows —
4
0500, F— 1111, 8 — 1000, 4— 0100
‘The message decodes, from the Drive Configuration table, as —
‘speed control mode — auto start mode — coast to stop — fixed boost — unipolar speed reference —
‘open loop feedback — slave mode — frequency (speed) display — keypad control — even parity bit
—4/20mA speed reference — Baud rate 4800,
‘There ara four possible states of Stopping Mode
Parameter |
ree Mode
oo |
0 0 | Standard ramp |
© 1 | Coast |
1 © | intro |
11 | High teve ramp |
‘To wite to drive number 11, sending the same parameter settings as in the
'S a complete set-up command, the message would be —
cample on page 8-11, which
cor Tayi] i}a] six ols, Ex t
ControLD Contral-B Control-c
i I (@c0)|
The drive replies ACK if the transmitted data is understood, or NAK if not (in which ease look for an error
in wrting the characters or inthe format of the message)
>] 4] Fe
Note that parameters b6, b10 and b12 cannot be written to the dive through the Serial Communications,
link, athough they must be included to form a complate message. The drive ignores these when received,
‘but does nct ignore them when interrogated about the drive configuration,
19
Bite scctaen .
SERIAL COMMUNICATIONS: CD75-750
DRIVE CONFIGURATION DS Example
Bi peremetr Le tex | Bey
NOT USED eae 4 | ome)
Corel moda vo | ewe cistan |
‘Start mode bt | auto, °
Sepning me 2 [oe Soppre one)
Boor mode we) awe F | sme)
sr biargmed MA | isa eden | 1
‘Feedback bs i ‘encoder 1
Master oie be | master te)
‘Seen made Wee Sepprgiccemie |e | tema
Diepiay bs | frequency | load (3rd char) °
Cont mode t0 | teyped | eminal | °
ary ie wie | own | att neo)
| Current loop b11 | see current loop table 4 O(msb)
Current loop. B11 | see current foop table (4th char), 1
nor useD =a - |
i wi | 400 | seco one)
“Thora aro three possbile states of
Current Loop
Current oop | Speed |
+ Reference
=]. Input
| o lo oma
| ° 1 ‘4/20mA
io 2ortma
an
CD75-750 SERIAL COMMUNICATIONS:
FQ.— PWM SWITCHING FREQUENCY & MVF (2 Hexadecimal digts)
FO is a one-byte, ie two-character, word. The status of PWM switching frequency
and ULF are given by te fllowing FO exdes:-
Fa codes
Word PWM
FO Switching | ULF
Frequency
00 zoxe | ron
ot) eke | eons
10 Sokt2 | 1208
" soKiz | 240He
1 soKiz | 4s0He
20 sakHz | 120K
a saz | 24ote
a
30 11.7kH2 | 1208
a 11.7KHz | 24oree
2 11.7eH2 | aoe
33 an7KHz | 960:
To read FO for dive number 15, send —
cot |ii1[s{s]e lo] eno
ControlD | controle
tt
The drive replies, for example —
sx Jerla] [ [> hfo] ex [+
Contro-8 1} | contrat
Al (@00)
‘The two characters following the symbol > require no further translation. They are
‘compared with the codes in the tabla for FQ. The reply in this example means that
drive 15 Is operating at 5.9kHz PWM switching frequency, and the ULF is set at
120H2.,
‘The settings of these frequency parameters can be changed by an operator
(computer) or by a ple programmed to send the FQ codes. To set the frequency
parameters of drive number 15 to 5.9kHz and 120Hz, the complete message is —
six Fl
(Control-8
{ eor [als
| ControtD
is Is >h Jo] ex +
IControLc
(eco)
as
SERIAL COMMUNICATIONS 075-750
816
‘CW — COMMAND WORD (2 Hexadecimal Digits)
Tris is a one-byte hex-value word (two characters) enabling the drive to be controlled through the serial
link. is important to note that although the external icalremote control is set to REMOTE as part of the
‘Set-up for serial link operation, the terminal inputs are not disabled — they remain operative.
The two characters decode into states which control the principal command functions of the drive, as
follows —
RESET, TRIP (external), STOP, RUN,
GW allows the drive to state the direction of rotation as set by the control terminal in reply to interrogation,
‘but cannot be used to reverse the rotation. REVERSE command is given by using a negative speed
reference SP (see table of mnemonics).
Extemal LOCALIREMOTE and LOCAL FWD/REV cannet be changed through the serial communication
link, but CW permits the state to be read. To read CW for drive number 11, send —
bcecot alti |1 fe ]w] eno
| control-o | Control €|
‘The drive replies, tor example —
sx [cw >|ije] ex
Control | | controte
L =
‘The data following the character > decodes from hex to binary, to mean —
remote direction set to forward — not reset — external trip input closed — local
forward — localremote terminal switched to remote — not stop — not run
Command Word CW Baampla
[tren Temas ve | omy |
° 1 |
Tears Soe ee ee
ve s200 -|- 4 °
fase con | neocons | | scr} 0
| Exteral rip: open dosed | (sb)
a) |
FWOREV" open | dosed (rev) 6 O(msb)
Local/Remote * open (local) | ‘closed (rem) {2nd char) 1
| os commit) | coe | nat
| re con | neti | Q
* Carnot be changed through the Serial Communications Link
oo atte
(©D75-750 SERIAL COMMUNICATIONS
‘Typleal Values of Command Word CW
Function CW values during Not start
option Not reset
sslected | Power | Stat | Stop | Reset | Trip | Nottrip
“on
toward | 76 | 17 1“ 36 6 | 1
remote
roverse | 16 | 1F we | x | oc | te
remote |
toward | 2 | 18 10 2 a | 2
| bcal
| rovers | a | 18 8 aa | on | tA
| tocal
(C1 — DRIVE CONFIGURATION WORD 1 (4 Hexadecimal Digits)
“This is a 2-byte hexvalue word (Jour characters) enabling the state of bit-parameters 20 to BS4 to be
read or changed. The four characters following the > symbol decode into binary states, in a similar way as
for the DS Word, to indicate the valve of the bit parameters. For example, o read C1 for drive number 11,
send —
{-eor Jafar [ats fe]s | eno |
| conrato Conroe |
The drive replies for example —
sm [cls] ]>]2]olofo] er
conte | | controkc
ea (ace)
‘The data following the > character aro treated as hex characters, and decode to binary as follows —
20010, 0—0000, 0— 0000, o— 0000
The message decodes, from the C1 table, as =—
Run Status ofp -~ Fixed VIF ratio — spinning motor disabled — FWD/REV key disabled — RL1 is DRIVE
HEALTHY — standard accel/dece! rates — 3 presets + jog — terminal reverse control
a7
SERIAL COMMUNICATIONS
(C1 — CONFIGURATION WORD (2 Hexadecimal digits)
(CD75-750
f ] T
on =o “ Function
(atau)
|e Characor
lane = ° - =
Foes Dynamic varato
Pun Miimum speed | Open colocor ouput
tench ath | Spiming mary syne
Disabled Enabled EWDREV key
Drive Hoahy Speed Drive Healy’
‘Atspeod lay
| ‘Standard Preset ‘AccevDecel
Provetsdog | 7Praset no Jog | Preset Speed puts
Terminal Preset Provetroveres
°
°
°
‘oh Character
Not used °
| Noted °
Noted °
Not used °
PS — PRESET SPEED SELECTION WORD (2 Hoxadecimal digits)
PS is a one-byte, i. two character word that enable the preset speed to be controlled via the serial link.
‘The PS characters decode into the following equivalent states of terminals AIO - A12.
Terminal A1t
Terminal A12
PS cries | Terminal ATO
oo ‘open
91 closed
2 ‘open
03 closed
os ‘open
05 closed
95 open
o7 closed
open open
open pen
dosed
dosed
open
open
closed
dosed
Hai
Relevant only
20-1
NOTE — PS cannot control jog input (terminal A12) i'b20 = 0 but can always read the status of A12 input.
To read PS for drive number 15,
T
fet] y fel ]ele] exe
ControkD Control
C
‘The drive replies, for example —
st |P/s| [> Jo |» | _ ET
Contro-B| Control-c|
I (eco)
‘The two characters following the symbol > require no further translation. They are compared with the
codes in the table for PS, The reply in this example means that dive 15 is operating with terminal A10
closed anc A11, A12 open.
CD75-750 SERIAL COMMUNICATIONS
RN — RESET NUMBER (2 Hexadecimal Digits)
This is a road-write parameter. To read RN for drive number 22, for example, send —
2l2[el[a[n] eno
Controbe
> ]ol4] ex
Control-c|
(eco)
‘The data folowing the > symbol is hex 04, which is 4 decimal indicating that 4 resets, as set by Pr50 for
‘example, ara allowed before the trip condition locks out drive operation.
FC — RESET COUNTER VALUE (2 Hexadecimal Digits)
‘This is a read only parameter. To read RC for drive 11, for example, send:-
cor [alt[+]i [ale] ena
ControlD Control
‘The drive wil reply, for example —
[sx Jaleo >)ols]_ ex
ConroLB Control-c
| | (eco)
‘The data folowing the > symbol is hex 03, which is 3 decimal, indicating that # RN = 4, one fife has been
sed to reset the drive prior to being reset back to 4 again # the drive resets and works for a given period
of time,
319
CD75-750
BRAKING
9 Braking Unit
(Optional)
91
9.2
aoe
94
9.5
9.6
9.7
98
Introduction
Principles of Operation
Braking Unit Specification
External Braking Resistor Sizing
Electrical Installation
Mechanical Installation
Operating Procedures
Diagnostics - Problem Solving
CD75-750 BRAKING
9
Braking Unit (Optional)
91 Introduction
‘This chapter covers the various aspects of the optional braking unit, such as the following points:
‘Why co we need an optional braking unit?
How does the unit connect to the CD drive?
‘What are the mechanical requirements for installing the unit?
‘Can we use the in-buit braking resistor or do we need to use an external resistor?
How do we size the separate braking resistor?
How does the braking unit operate?
How do you know when the unit is operating correctly?
9.2 Principles of Operation
A decelerating AC motor regenerates energy into the inverter drive as the load ‘overhauls’ the machine.
The regenorated energy can only be dslpated within the drive, K cannot be retumed to the AG supply by
the CD unt. il the regenerated power isles than the tosses of the CD unt, the unt wil perorm
satisfactory. the ragenoated powers more than the losses ofthe CD, the unt wil on ovarokage
unless the optional braking unit is fitted. Typically a drive will dissipate about 3% of its rated power as
losses, and as such will tolerate about 3% regenerative power without a braking unit and without tripping
the drive.
Factors which influence the amount of regenerative power are:
‘Tho inartia of the machine and load
1aximum speed of the machine and load
Tequired deceleration rate of the drive
The mode of drive decelaration sat by ‘62’ and ‘b7*
‘The power rating ofthe drive
From theory the amount of regenerative power 'P' for a constant rate of deceleration ‘a, for a given inertia
'T,and at a certain speed ‘sie:
Peas!
wnere P= watts
a= radians st
s= radians 5?
She kgm2
For a drive with a given deceleration rate (set in Pr3 or Pra0—46) and a certain speed in Hz the above
‘equation becomes:
Pa r2001 (CE) x2
T
where @= speedin Hz of drive
B= number of machine poles (e.g. 2, 4, 6 etc)
1 = deceleration time set in Pr3 or Pr4a0—A6 for 120Hz maximum frequency. (I
'b14 sot for upper limit frequency other than 120Hz, modify constant of 120 to
23
nnn TINE Hm SS ERR TSE ETT FNS RS SMR alll
BRAKING CD75-750
From the above equation it can be seen that the regenerative power is directly dependent on the
machine/ioad inertia and the drive speed of operation. The lower the value of Pr3, the greater th
regenerative power by the inverse relationship. This equation therefore explains the fist three of the
{factors which influence the regenerative power.
The influence of the b2 and b7 settings only has a small influence on the regenerative power produced
uring deceleration. it must be noted that regeneration will occur whenever the drive speed is reduced
whether or not the drive is stopping. The consequences of b2 and b7 described below are vali for ail
Speed reductions. When b2 and b7 are both zero, the internal ramp is stopped whenever the driva's DC.
link voltage exceeds about 70V above the normal working value, and this also comesponds to when the
‘optional braking unit will tum on the dumping resistor. This mode of operation extends the deceleration
amp to reduce the likelihood of the drive tipping on overvokage. In this mode of operation #s the DG link
voltage rises tha applied voltage to the machine wil increase by the same percentage rise, ‘This has the
‘added consequence of increasing the magnetizing current to the machine which will increase the
dissipation capabilty of the machine/drive for regenerative power. Unfortunately this may also cause
Overcurent tripping f the DC link voltage rises too much, increasing the magnetizing current Up to the trip
level ol the drive. Typically b2 and by set to zero provides extra drive regenerative dissipation capability
‘and reduced sensitivity tothe Pr3 setting without the need for the optional braking unt.
‘When b2 and 87 are both set to 1 the internal ramp is maintained at the set rate whether the drive's de
link votage excoeds the 70V margin above the normal working value. In this mode of operation, as the de
link votage rises the applied volage to the machine is maintained constant. This has the consequence of
‘maintaining the magnetizing current to the machine, which maximises the amount of regenerative power
‘back into the drive. "Unfortunately this may cause overvotiage trioping the de link voltage rises too much
‘Typically b2 anc b7 set to 1 is characterised for use with the optional braking unt.
‘The above explanation details how the b2 and b7 influence the braking capabilty ofthe drive, finaly the
‘ive rating has an influence on the regenerative capabilty of the drive in that regenerative power revaies
directly to drive current, and as such the drive will rip out on overcurrent # the current exoseds 150% of
the drive rating during regeneration. Therefore the drive rating determines the maximum regenerative
capabiity ofthe drive.
Operation of the Braking Unit
‘The braking unit is a seit contained unit that contains the braking resistor and the control electronics for
Controling the braking resistor. The unt powers itsel from two phases of the three phase supply used for
the drive, and uses the vottage of this incoming supply to determine the correct vottage for applying the
‘braking resistor across the de lnk from the CD drive.
The braking unit continuously monitors the CO's internal DC link votage and compares it o the incoming
‘supply voltage. When the DC link voltage exceeds a set margin (approximately 70Vée) above th
‘expected value the braking resistor is applied across the DC link. When the voltage reduces back to the.
‘expected value tne braking resistor is removed from circuit
‘The braking unit automatically adjusts itself according to the AC supply for the drive, anywhere from 380
to 480Vac + 10%
93 Braking Unit Specification
‘Summary
‘The CD external braking unit is an optional unit that is completaly sel-contained with the inclusion of a
standard braking resistor. The minimum electrical connections to the unit will be the DC supply
‘connections from the CD unit, two AC supply connections from the CD unit for power and voltage sensing,
and a relay output for indicating heafthyfault conditions. The internal resistor has a power dissipation
capabilty of 220W + 10%, however if this is not sufficient the internal resistor can be easily inked out and
a customer supped resistor connected instead.
‘AC Input Supply
‘The same range as the CD unit:-
‘380 - 480Vac (three-phase) 4 10%
‘However all input frequencies from SOHz to 60Hz + 2 Hz willbe tolerated
o4
(CD75-750 BRAKING
In-bullt Braking Resistor
“The resisto: rating is nominally 220W. The resistor is capable of sustaining pulses of energy switched
from a 850Vde source (15.4 KW instantaneous up to 2 mill-s@conds), with 11 KW dissipation for 1 sec
repeated every 50 seconds. The resistance value is 47 Ohms + 10%.
Isolation Withstand Voltage
‘The braking unit will tolerate 2.5 KV ac, SOHz for 1 minute betwoen all electrical terminals and the
‘electrical earth connection.
‘Temperature Range
‘The operating ambiont temperature range is 0°C to +50°C.
In-bultt Braking Transistor
‘The transistor is a standard part for 380 - 480Vac supplies, with a peak capability of 20A. Whilst switching
20A the transistor will operate continuously with a 10% on-time duty cycle when the braking unit is in a
50°C ambient, ie. it will tolerate a 1 second on-time followed by a 9 second off-ime on @ continuous,
basis. The transistor will also tolerate a 6.3 A rms continuous duty.
Protection and Indication
“The unit has 4 LED indicators, one for AC control power present, one for DC control power present, one 10
indicate when the braking transistor is ‘on’, and the last one is a brake resistor faut LED. The control
Power supoly derived from two AC input phases willbe fused. The unit also has a protection relay that
Can be used to de-energise the main incoming supply contactor for the drive and braking unt.
“The brake resistor fault LED will indicate two fault conditions:-
“The braking transistor has no resistor connection (Le. open circuit).
‘The braking resistor is short-circuited, The unit will need to be powered off to reset either of these
faut.
‘The protection relay is used to indicate two fault conditions:-
“The irtomal resistor has overheated as measured by a heat detecting davice mounted close to the in-
buit resistor.
‘The measured AC supply voltage is bolow specication (380 Vac - 10%).
“The above faut conditions de-energise a vot-ree change-over relay for tipping the main drive supply via
ts own incoming supply contactor. The braking unit will not operate the braking transistor when the relay
is not energised.
‘A aut condition can only be reset by removing power to the drive unit and braking module.
f an external braking resistor is used instead of the intemal resistor, thermal protection of this resistor
‘must be provided by the user. This is necessary to avoid the resistor causing a fire hazard the braking
transistor fails on. Any thermal protection must disconnect the AC supply to the drive and braking uni
External Braking Resistor (Itrequired)
Minimum resistance = 47 Ohms +10%.
Maximum continuous braking power dissipation = 1.9 KW (derived from rms transistor rating and minimum
‘braking resistande)
Instantaneous power dissipation capabilty ~ 15.4 kW (for a maximum time of 2 miliseconds derived from
‘47 Ohms across 850 Vdc.)
95
BRAKING CD75-750
9.4 External Braking Resistor Sizing
Firstly the peak power dissipation requirement must be determined from the machine/load inertia, the maximum
operating drive speed, and the minimum raquired deceleration rate. From the previously stated equation, but
modified for maximum conditions:
aye
Poveda (EY x TI
where @max = maximum operating speed in Hz of drive
P= number of machine poles (e.g. 2, 4,6, 6 etc)
‘min = minimum required deceleration tie set in Pr for 120 Hz maximum frequency. (i
114 is sat for upper limit troquency other than 120 Hz, modiy constant of 120 10
correct upper equeney.)
Prax Must Be loss than 1.5 times the dive rating to ensure the drive can handle the braking duty
Prax TUst also be Jess than the pask power dissipation of the braking resistor when appli 10
the maximum DC link voltage level of 850 Vee:
e502
Pmax << S508
S R
whore Fla Braking rasistor vale in Ohms
Provided the braking resistance value satisfies the above equation, and is greater than the minimum resistance of 47
‘Ohms, the resistor will meet the required application.
‘Secondly the power rating of the braking resistor must be determined. (We currently know is resistance value and
Peak power dissipation capabilty.) The power rating of the resistor is dependent on the energy removed from the
‘machine load during deceleration conditions and the repetition rate of this occurrence. The energy removed from the.
‘machine drive for a given speed change is:
oe = 05f( E) (m2 - 024]
where cy = highest operating speed in Hz
©2 = speed decelerated to in Hz (possibly OH if the machine is stopping or reversing)
It this event takes 1, seconds to occur and repeats after tz seconds, the average power dissipation in the braking
resistors:
Paviees = "RS Watts
yt)
Pav loss defines the average power loss in the braking resistor. Hf this valua is greater than 220W then an external
‘braking resistor is raquired. Hf the value is greater than 1.9 kW two or more braking units are required to handle the
large power dissipation.
96
CD75-750
BRAKING
ole
up— | ep
PONE ON| POU on
39 Optional braking und, outing and
mounting dmestions and terminals.
a7
TN PENS URNS 056: de 8
BRAKING CD75-750
95 Electrical Installation
Roter to Fig. 40,
The braking unit has 2 sats of electrical connections. One set consists of the power connections for
‘onneating to the CD crve (both AC and DC power), and the option of ether using the internal braking
resistor of connecting an external resistor. The other set of connections is for the contol relay which i
‘used for protection purposes,
‘The unt can ba connected in one of two ways: '
{or use withthe intemal braking resistor;
for use with an external braking resistor. For dimensions, reter to Fig. 39.
: <
i |ocneut
i ruyymert,
“eoe
Then
' een
v tC —
eowrnoal [one
0 cai act lie Ge
ie as
£
—r rau
+ mu
i WS
veers
i Bene
| suet
i Sees
i SA
lu
T ier.
us foe
vee woTon | sRARne UN
4 Sehamatc diagram of baking syst, showing opionaledernl braking un
os
Freer ese
earns: see
CD75-750
BRAKING
WARNING
WHEN CONNECTING DC LINK, ISOLATE UNIT FROM SUPPLY. HIGH VOLTAGES PRESENT.
Internal Braking Resistor Employed
For the uni to operate correctly the two AC line connections (Lt and L3) must be connected directly to the
‘wo incoming ines (L1 and L3) of the CD drive that the braking unit is operating with. These connections
must be made with power cable with at least a 1A rating Le. 0.5 mm?, Referto Fig. 41
‘The +DC INPUT conection must go directly to the + connection on the CD. The -DC INPUT connection
‘must go éirecty to the - connection on the CD. The INT R connection must be directly linked to the Rt
connection. (No connection is to be made to R2.) The above connections must be made with power
cable with atleast a 10A rating Le. 1.5 mm?,
‘The EARTH connection must go to the supply earth with a suitably rated power cable specified by local
‘earthing practice.
‘The control relay connections (COMM, N/O and N/C) must be used to trip the incoming supply
‘contactoricrcuit breaker in the event of a protection trip within the braking unit. Typical the COMM and
NIC connections would be connected in series with the trip circuit of the cireut breaker, or the contactor
‘oil circuit ofthe contactor. These connections can be made with control cable with 0.5 mm? conduct.
‘CONTROL.
‘SUPPLY —
stor START
‘41 Connections to Braking Unit when using the internal braking resistor.
RnR REN EA Be:
BRAKING CD75-750
External Braking Resistor Employed
For the unt to operate correct the two AC line connections (L1 and L3) must be connected directly tothe
‘wo incoming ines (L1 and L3) ofthe CD ctive thatthe braking unt is operating with. These connections
‘must be made with power cable with at least a 1A rating ie. 0.5 mm?, Filer to Fig. 42.
The +DC INPUT connection must go directly to the + connection on the CD. The -DC INPUT connection
‘must go directly to the - connection on the CD. (No connection is to be made to INT R.) The Rt
‘connection is to be connected to the external resistor via a suitably rated thermal overioad relay. The R2
‘connection is to be connected to the other end of the external resistor. The above connections must be
‘made with powar cable with at least a 10A rating ie. 1.5 mm?.
‘The EARTH connection must go to the supply earth with a suitably rated power cable spectied by local
‘earthing practice,
The control relay connections (COMM, N/O and N/C) can be used to trip the incoming supply
‘contactor/citcuit breaker in the event of a protection trip within the braking unit. Typically the COMM and
NIG connections would be connected in series with the trip circuit of the circuit breaker, or the contactor
oil circuit of the contactor. The normally closed contact of the thermal overload relay protecting the
‘external rasistor must also be connected into the above trip circutty. These connections can be made
with control cable with 0.5 mm? conductor.
sTaRT
‘42 Connections to Braking Unit when using an extemal braking resistor.
10
CD75-750 BRAKING
WARNING
‘The design of the user's control wiring system must ensure that in the
‘event of a fault being flagged by the fault relay of the braking unit, OR
if the external thermal overioad relay operates, the incoming supply
‘contactor will trp to disconnect the drive.
9.6 Mechanical Installation
Refer to Fig. 39, page &7.
‘Tho CD braking unit is designed to accept two alternative mounting arrangements. The unit can be
mounted either on its back plane (surface mounting) or with the heatsink and resistor projecting through
the mounting panel
‘Tho unit must be mounted vertically, and sufficient clearance must be allowed around the unit to allow
‘adequate flow of cooling air over the fins of the heat sink. A minimum of 100mm is required above and
bbolow the unit, and some clear space should also be allowed at the sides and front.
9.7 Operating Procedures
It power i now applied tothe drive, the associated braking unit should automatically be powered up also.
‘To verity his the ‘AC power on’ and ‘DC power on’ LEDs should light on the braking unit control PCB. it
‘ther LED does not light, power down the drive, wait at least 10 minutes to ensure all vokages have
decayed to a sate level, and then check the power connections to the AC supply and the de link.
It the ‘braxe resistor fauity’ LED also comes on at power up, this means that ether the braking resistor is
‘ot in-circuit or short or that the uni is faulty. Power down and wait 10 minutes before checking for an
‘pen circu or short circu.
Hf the unt is healthy, after power-up, the AC and DC power on LEDs should be I, and the ‘brake resistor
‘on’ and ‘brake resistor faulty’ LEDs should be ‘off. The control relay should also change stato Fall is
healthy following power-up.
To operate the braking unit, the drive will need to be turning the machine at a reasonable speed and a
rapid deceleration condition must be created. I the inertia is significant the dc lik voltage should rise and
ccause the braking unit to operate. When the braking unit operates the ‘brake resistor on’ LED should
flicker whenever the braking resistor is connected to the dc link. i the deceleration is nt fast enough, or
the drive speed is not high enough, or the machine inertia is not large enough the ‘brake resistor’ ‘on’ LED
‘may not come on,
‘The contol relay will de-energise if the internal braking resistor overheats, or there is an intemal faut
‘within the braking unt, To reset the unt the power must be removed from the product long enough for the
Unit to power of, Le. when all LED's on the braking unt extinguish.
ont
IS CN RRC T Te TRS
BRAKING 075-750
9.8 Diagnostics - Problem Solving
‘AC Power On LED does not ight
(Check that the L1 and L3 inputs are connected to the drive's AC input and AC power is present.
(Chock that the fuse on the control PCB is not faulty. i open circuit, replace with an equivalent rated
{use and re-power up the unit. Hf the fuse fails again, the unit is probably fauty.
DC Power On LED does not ight
(Check that the +DC Input and -DC input connection are connected to the drive's DC outputs with the
Correct polarity and DC power is present.
Drive trips on overvottage ‘OU' whilst decelerating
‘Tha braking unit should be turing on the braking resistor. Check that the ‘braking resistor on’ LED is
‘coming on during deceleration. tft is not the unt is faulty
Ian external braking resistor is being used, the resistance value may be too high and needs reducing
Provided the resistance does not become lower than the minimum value of 47 Ohme.
‘The deceleration rte i too fast for the drive even with the braking unit functioning correctly, and thus
the Pra valve will need increasing.
Brake Resistor Faulty LED lights
(Chock that the braking resistor is not shor circuit or open circuit.
Hf the braking resistor is in-circuit, the unt is faut.
Brake Resistor On LED does not light during deceleration
‘The deceleration rate is not fast enough to require the unit to operate.
‘The inertia and load of the machine configuration is such thatthe unit does not need to operate.
' the drive rips on overvotage/overcurrant during deceleration, then the unit is faulty.
Drive trips on overcurrent ‘OF during deceleration
The deceleration rate is too fast. Reduce Pra.
"the drive is set up with b2 and b7 set to both 0, sat to both 1 to perform best with the braking unt
12
oO .
CD75-750
10 Electromagnetic
Compatibility
10.1
10.2
10.3
10.4
10.5
10.6
10.7
10.8
renner aie
Introduction
Immunity
The Nature of Drive Emissions
Immunity of Sensitive Circuits
Precautions for Drives
Additional Precautions for Sensitive Circuits
Optional RFI Filter
Installation of Optional RFI Filter
10-4
CD75-750 EMC
10
Electromagnetic Compatibility
10.1 Introduction
The purpose of this note is to assist system designers to incorporate drives into complete systoms without
encountering problems with electromagnetic interference. Because drives use last switching of high
voltages and currents to achieve high efficiency and low acaustic noise inthe motor, they generate some
‘agio‘trequancy (RF) energy which has the potential to disturb other circus
‘The majorty of sensitive circuits are deigned to be immune, to a reasonable degree, from the various
kinds of aisturbance which may arise, for example, supply disturbances, fast electrical Wansients caused
by switches, relays and contactors, and radio trequency fields caused by radio transmiters. Many of
these sources are random in occurrence. It often arses thatthe first sign of inadequate immunity ina
Circuits 's when disturbance is caused by a drive or other powerful electrical circuit during the
commissioring procedure. Athough the drive may wall be blamed in these circumstances, iis Important
{o ensure that the immunity of the related crats is adequate. If this is not done, random problems wil
‘cur during subsequent operation trom the various existing sources of disturbance.
10.2. Immunity
The immunty of drives to externally generated interference is good. Usually, no special precautions are
required beyond normal good installation practice. ft is recommended particulary that the cols of do-
energised contactors associated with drive should be suppressed with a diode or similar device, since
they can generate severe electrical transionts,
In areas subject to frequent lightning strixes, and where supplies are cared on lines above ground,
‘additional surge suppression is advisable beyond that fited to drives as standard. Suitable varisiors
(MOVs) connected betwoen each line and earth should be used,
10.3 The Nature of Drive Emissions
10.3.1 Frequency Range
‘Switching takes place in the range 1 to 30kHz in ac variable speed and servo drives. Because the
Switching is fast, harmonics may be generated up to frequencies of several MHz. The most important
range is the radio-frequency (RF) range, 100kHz to SMHz, because the energy can be propagated over
Quite long distances and a varity of other circuts may be sensitive to disturbance in this range.
10.32 Propagation Routes
{tis important to appreciate that the drive itsetf does not radiate much FF energy. Within about 100mm of
«a drive there are quite high electric and magnetic fiekds, but as they diminish according toa cube law, they
‘are insignificant at 300mm.
‘Tha main mechanism for the propagation of RF energy produced by drives is by conduction through
‘lectrical connections. The main routes are ilustrated in Fig. 43.
‘The connections in order of emission level are —
(@) The Motor Cable
‘This carties high RF vokage and current, and may disturb a nearby circuit. However, the electric.
‘and magnetic fields falloff rapidly with increasing distance from the cable.
103
EMC ©D75-750
mm
MII === Corto connections
5 :
43. RF current paths for drive with no special precautions.
(©) The Supply Cable
‘Atthough this carries a lower AF vokage than the motor cable, it ie connected to a widespread
network. This means that # can act as an effective transmitting aerial. Also, t conducts omissions
into a wide variety of other equipment. The supply cable is the single moet important route for
‘emissions. into victim equipment.
Tho length of the motor cable affects the emission into the supply cable. It the motor cable
‘@xceeds about 50m, the emission trom the supply cable will be particularly severe.
(¢) The Earth System
The drive earth wire carries the RF current returning from the motor, Because the inductance of
the wie is significant at high frequencies, both the drive earth and the motor frame may carry RF
voltage. This may be a problem i sensitive circuits share these earth connections.
(€) The Contro! Connections
Inside the drive the control circuits have stray couplings to the power circuit. The AF levels are
‘much less than on the power connections and the source impedance is high, so problems do nct
‘often acest with these connections,
A drive may be tought of as a source of RF current which leaves its output terminals. The capacitance of
the output cables and motor windings with respect to earth present quite a low impedance to the RF
frequencies, s0 the current flows from the output to earth. it then has to find ts way back to the drive
arth and powe’ input terminals. If t does not have a low-impedance path i may flow in unexpected
directions and disturb nearby sensitive equipment. The principle of good layout for emission control is 10
Provide a direct, iow-impedance path for this current.
10-4
CD75-750
10.4 Immunity of Sensitive Circuits
In many drve installation there are either no sensitive circuits vulnerable to disturbance, or the sensitive
circus have been designed by their manufacturers to have good immunity. To avoid unnecessary costs,
through reducing drive emissions it is useful to be able to assess the likelihood of other circuts being
disturbed and to be aware of standard methods for ensuring immunity
The following ist indicates the relative sensitivity of typi
‘ot cover ail possibilities, and some degree of judgment willbe required in assessing a given situation.
electronic ct
10.4.1 Not Sensitive
Purely-electrical circuits comprising only relays, contactors and
‘loctromechanical instruments,
10.42 Not Significantly Sensitive
Many electronic systems are insensitive to drive emissions — computers,
PLCs, all digital electronic circuits, and analogue circuits using high levels
(over 1V), are unlicely to be disturbed unless they include components which
fall into the ‘Sensitive’ category, below, o are installed in such a way that
they are closely-coupled to drive emissions,
10.4.3 Sensitive
Analogue measuring circuits using low levels, such as thermocouples,
resistive temperature sensors, strain gauges, pH and similar instruments:
particulary it the connections are long andlor unscreened.
Analogue measuring circuits using high levels (over 1V) only if the
‘connections are long and/or unscreened or they are required to give high
resolution (better than 1 in 1000).
‘Analogue circuits which have very fast response or wide band-width, for
‘example, audio circuits. Most industrial systems in fact have intentionally
‘low response to minimise disturbance by transiont effects.
‘Video circuits, such as closed-circuit v, and possibly computer monitors.
Digital data links, but only if they are unscreened or in an unusual
‘configuration. Conventional RS232, RS485 and fast links such as ‘Ethernet’
have good immunity when correctly installed with high-screening cable,
Proximity sensors which rely on high-frequency oscillators, particularly
‘capactiance types.
10.4.4 Very Sensitive
Only systems which are specifically designed to be sensitive to
‘electromagnetic radiation in the 100kHe to SMHz range are included here —
Radio receivers — long and medium wave only
Inductive-toop pagers and communications systems.
Mains-borne communications systems
— But not television, VHF radio receivers, mobile telephones, radio
‘emote-contrlias of other madern radio-based equipment which uses
‘ary high frequencies.
EMC
its and systems. The list does
105
EMC
10.5 Precautions for Drive Installations
‘There are precautions which cost litle to implem
‘summarised inthe following paragraphs and in Fig. 44.
10.5.1 Segregation
‘No signal circuit should be run parallel to an unscreened motor cable or
Lunfiterad supply cable with a spacing less than 0.3m and over a distance
‘exceeding tm. .
For parallel runs longer than 10m, the spacing should be increased in
proportion to the run. For example, for a run of 40m parallelod, spacing
should be 0.3 x 40/10 = 1.2m,
No signal circuit should pass within less than 0.3m of the dtive itso. If this is
‘unavoidable, an earthed aluminium screen should be erected between the
Sircuit and the drive. (This constraint obviously does not apply to signal
connection to the drive itself. The immunity of the drive to external
imerterence is compatible with its emissions.)
10.5.2 Earthing
In any cubicle, a single, low-impedance earth point or busbar should be
established, to which circuits are earthed independently and directly, and to
which the incoming earth is connected. tt is particularly important that the
You might also like
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- De Uribe, Santos y otras especies políticas: comunicación de gobierno en Colombia, Argentina y BrasilFrom EverandDe Uribe, Santos y otras especies políticas: comunicación de gobierno en Colombia, Argentina y BrasilNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- La arquitectura del teatro: Tipologías de teatros en el centro de BogotáFrom EverandLa arquitectura del teatro: Tipologías de teatros en el centro de BogotáNo ratings yet
- Orbit: Siegel & Shuster: the creators of Superman: Spanish EditionFrom EverandOrbit: Siegel & Shuster: the creators of Superman: Spanish EditionNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (347)
- Nuevos alfabetismos. Su práctica cotidiana y el aprendizaje en el aulaFrom EverandNuevos alfabetismos. Su práctica cotidiana y el aprendizaje en el aulaNo ratings yet
- Lecciones de física de Feynman, I: Mecánica, radiación y calorFrom EverandLecciones de física de Feynman, I: Mecánica, radiación y calorRating: 3 out of 5 stars3/5 (2)
- Coeducando para una ciudadanía en igualdadFrom EverandCoeducando para una ciudadanía en igualdadRating: 5 out of 5 stars5/5 (1)
- Computación en la nube: estrategias de Cloud Computing en las empresasFrom EverandComputación en la nube: estrategias de Cloud Computing en las empresasNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Coaching Samurai: ECONOMÍA, FINANZAS, EMPRESA Y GESTIÓNFrom EverandCoaching Samurai: ECONOMÍA, FINANZAS, EMPRESA Y GESTIÓNNo ratings yet
- De la calle a la alfombra: Rogelio Salmona y las Torres del Parque en Bogotá,From EverandDe la calle a la alfombra: Rogelio Salmona y las Torres del Parque en Bogotá,No ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Educar y convivir en la cultura globalFrom EverandEducar y convivir en la cultura globalRating: 5 out of 5 stars5/5 (2)
- Aprender a escribir en la universidadFrom EverandAprender a escribir en la universidadRating: 5 out of 5 stars5/5 (1)
- Exploraciones sobre el aprendizaje de lenguas y contenidos en programas bilingües. Una indagación en la escuela primariaFrom EverandExploraciones sobre el aprendizaje de lenguas y contenidos en programas bilingües. Una indagación en la escuela primariaNo ratings yet
- Empoderamiento, autonomía y pensamiento crítico en las aulas de lenguas extranjeras: Indagaciones en la educación superior colombianaFrom EverandEmpoderamiento, autonomía y pensamiento crítico en las aulas de lenguas extranjeras: Indagaciones en la educación superior colombianaNo ratings yet
- Los pequeños gigantes del planeta, la esperanza: Un cuento para toda la familIaFrom EverandLos pequeños gigantes del planeta, la esperanza: Un cuento para toda la familIaNo ratings yet
- Love Giraffe Children's Tales (English & Spanish Edition): La Jirafa del Amor Cuentos para NiñosFrom EverandLove Giraffe Children's Tales (English & Spanish Edition): La Jirafa del Amor Cuentos para NiñosNo ratings yet
- Pata ti conquistador Felicidades: Antologia Poetica Creacion y diseno con hoja de notasFrom EverandPata ti conquistador Felicidades: Antologia Poetica Creacion y diseno con hoja de notasNo ratings yet
- Entrena a tu Cachorro Interno a Comer Saludable: Deja Que tu Estómago Sea tu GuíaFrom EverandEntrena a tu Cachorro Interno a Comer Saludable: Deja Que tu Estómago Sea tu GuíaNo ratings yet
- Grandpa's Big Knees (El Tabudo y La Reina): The Fishy Tale of El TabudoFrom EverandGrandpa's Big Knees (El Tabudo y La Reina): The Fishy Tale of El TabudoNo ratings yet
- Contra la nostalgia: San Juan de la Cruz y los orígenes de la líricaFrom EverandContra la nostalgia: San Juan de la Cruz y los orígenes de la líricaNo ratings yet
- Luchar contra la corriente: Derechos humanos y justicia climática en el Sur global bilingüeFrom EverandLuchar contra la corriente: Derechos humanos y justicia climática en el Sur global bilingüeNo ratings yet
- Oscuridad Y Decadencia. Libro 3. Intersección De Sueños: Fin De La Historia De La Sirena Que Soñaba Con Ser HumanaFrom EverandOscuridad Y Decadencia. Libro 3. Intersección De Sueños: Fin De La Historia De La Sirena Que Soñaba Con Ser HumanaNo ratings yet
- Documento en desarrollo Cider 1. El proceso de formación de agenda política pública de seguridad democráticaFrom EverandDocumento en desarrollo Cider 1. El proceso de formación de agenda política pública de seguridad democráticaNo ratings yet
- Nuevos enfoques para el estudio de las relaciones internacionales de ColombiaFrom EverandNuevos enfoques para el estudio de las relaciones internacionales de ColombiaNo ratings yet