You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Is.2705.4.1992 - Current Transformers, Part 4Document11 pagesIs.2705.4.1992 - Current Transformers, Part 4Sugun Kumar PedapudiNo ratings yet
- Genelec OM 1031aDocument4 pagesGenelec OM 1031atinkoko750% (2)
- Casio CTK-485 Service ManualDocument20 pagesCasio CTK-485 Service ManualLeonel Cadenas Hernandez100% (1)
- 50kW MEGATRON - Battery Energy Storage Systems Datasheet - 2022 - Symtec...Document13 pages50kW MEGATRON - Battery Energy Storage Systems Datasheet - 2022 - Symtec...Sanjayan MaratNo ratings yet
- Land Mobile FM or PM Communications Equipment Measurement and Performance StandardsDocument228 pagesLand Mobile FM or PM Communications Equipment Measurement and Performance StandardsGeoffrey AlleyneNo ratings yet
- Easy Understanding of 3-Phase Transformer Connections (Delta-Delta, Wye-Wye, Delta-Wye and Wye-Delta) - EEPDocument14 pagesEasy Understanding of 3-Phase Transformer Connections (Delta-Delta, Wye-Wye, Delta-Wye and Wye-Delta) - EEProbert_rjc100% (1)
- Ecs V10il1 37GV10000 C0 Rev C PDFDocument32 pagesEcs V10il1 37GV10000 C0 Rev C PDFSigit SandjajaNo ratings yet
- Pioneer DDJ-S1Document134 pagesPioneer DDJ-S1nikola1660100% (4)
- Libusb Win32 Bin README PDFDocument1 pageLibusb Win32 Bin README PDFcicu78No ratings yet
- Vdocument - in Training-3 PDFDocument17 pagesVdocument - in Training-3 PDFcicu78No ratings yet
- White Paper - Spirent - v2Document11 pagesWhite Paper - Spirent - v2cicu78No ratings yet
- How To Select A GNSS SimulatorDocument15 pagesHow To Select A GNSS Simulatorcicu78No ratings yet
- PSL FW FPGA REG 2d0Document1 pagePSL FW FPGA REG 2d0cicu78No ratings yet
- Catalog Materiale Electrice FlukeDocument140 pagesCatalog Materiale Electrice FlukeFlorinNo ratings yet
- Ch2. Core of Embedded SystemsDocument15 pagesCh2. Core of Embedded SystemsnikhilpawanikarNo ratings yet
- Experiment - 1Document7 pagesExperiment - 1mainlu897No ratings yet
- Service Sirius 10-20 - GB - Rev02Document30 pagesService Sirius 10-20 - GB - Rev02Abdelwhab ElsaftyNo ratings yet
- Pixon 540Wp MonoDocument2 pagesPixon 540Wp MonoKarthi BNo ratings yet
- Kacific 1.2m Ka Band Terminal Installation Manual v2 6 WebDocument32 pagesKacific 1.2m Ka Band Terminal Installation Manual v2 6 WebRogie Lumagsao100% (1)
- TPS7A4700EVM-094 Evaluation Module: User's GuideDocument14 pagesTPS7A4700EVM-094 Evaluation Module: User's GuideJaroslav BiresNo ratings yet
- Mit Electrical Engineering ThesisDocument7 pagesMit Electrical Engineering Thesiskimberlyjonesnaperville100% (2)
- Non-Idealities of Switched Capacitor Filter DesignDocument19 pagesNon-Idealities of Switched Capacitor Filter Designhariprasath_vNo ratings yet
- 30° Directional AntennaDocument2 pages30° Directional AntennaLuis Diaz ArroyoNo ratings yet
- Self - InductIonDocument7 pagesSelf - InductIonKaushal BoharaNo ratings yet
- SN 761672 ADocument18 pagesSN 761672 AAda CsabaNo ratings yet
- OptiX PTN 900 Products BrochureDocument5 pagesOptiX PTN 900 Products BrochureMirza Ghulam SarwarNo ratings yet
- Megger MJ159, MJ359, MJ459, MJ559 Insulation Tester Data SheetDocument3 pagesMegger MJ159, MJ359, MJ459, MJ559 Insulation Tester Data SheetVimal PatelNo ratings yet
- Chapter # 5 Synchronous Generators: Week # 13, Lecture 38Document7 pagesChapter # 5 Synchronous Generators: Week # 13, Lecture 38Horaira Zulfiqar AbbasiNo ratings yet
- A-2.2-21-17-09 - Monoblock PumpDocument1 pageA-2.2-21-17-09 - Monoblock PumpNisanth ThulasidasNo ratings yet
- Green-Mode PWM Controller With Frequency Swapping and Integrated ProtectionsDocument17 pagesGreen-Mode PWM Controller With Frequency Swapping and Integrated ProtectionsAlex GerasimenkoNo ratings yet
- Elac s10 DatenblattDocument2 pagesElac s10 DatenblattAmador AguilaNo ratings yet
- MPX Avc BDocument3 pagesMPX Avc BAbdoulaye Andillo MahamadouNo ratings yet
- Light Meter: Model: LX-1102 ISO-9001, CE, IEC1010Document2 pagesLight Meter: Model: LX-1102 ISO-9001, CE, IEC1010Repararelcd LcdNo ratings yet
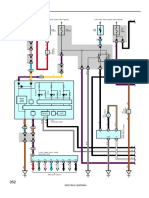
- Air Conditioning: 2005 PRIUS (EWD599U)Document12 pagesAir Conditioning: 2005 PRIUS (EWD599U)Sherman KillerNo ratings yet