You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (843)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Pull Up VoltageDocument2 pagesPull Up VoltageNelson Vejar Saez75% (4)
- PC-24-Equipment List 21Document40 pagesPC-24-Equipment List 217862182No ratings yet
- Doppler Speed Log: Marine Speed and Distance Measuring Equipment (SDME)Document52 pagesDoppler Speed Log: Marine Speed and Distance Measuring Equipment (SDME)cristianocalheirosNo ratings yet
- KU BAND MICROWAVE POWER AMPLIFIER Using AWRDocument81 pagesKU BAND MICROWAVE POWER AMPLIFIER Using AWRKrishna PrasadNo ratings yet
- Satellite Communications Chapter 3:satellite Link DesignDocument38 pagesSatellite Communications Chapter 3:satellite Link Designfadzlihashim87100% (5)
- Antenna Specifications Electrical PropertiesDocument2 pagesAntenna Specifications Electrical PropertiesDragićević Ivan100% (1)
- 11 Lecture PDFDocument14 pages11 Lecture PDFAE07No ratings yet
- Positesb 2018 08 125Document34 pagesPositesb 2018 08 125AE07No ratings yet
- Solar Energy Materials and Solar Cells: SciencedirectDocument6 pagesSolar Energy Materials and Solar Cells: SciencedirectAE07No ratings yet
- Composites Part B: SciencedirectDocument9 pagesComposites Part B: SciencedirectAE07No ratings yet
- CEM Arab2Document16 pagesCEM Arab2AE07No ratings yet
- EECE 211L Experiment 8 - RC and RL Low Pass FiltersDocument4 pagesEECE 211L Experiment 8 - RC and RL Low Pass FiltersHoàng NhậtNo ratings yet
- Practical PhysicsDocument2 pagesPractical PhysicsJafucNo ratings yet
- A867572220 - 23838 - 3 - 2021 - Assignment1 CSE306Document29 pagesA867572220 - 23838 - 3 - 2021 - Assignment1 CSE306nighatNo ratings yet
- Drive Test Training 2021Document35 pagesDrive Test Training 2021ibrahimNo ratings yet
- A Wide-Band CMOS LC VCO With Linearized Coarse Tuning CharacteristicsDocument5 pagesA Wide-Band CMOS LC VCO With Linearized Coarse Tuning CharacteristicsBasavaraj S KashappanavarNo ratings yet
- A Novel Approach To High Voltage Substation Surveillance PDFDocument5 pagesA Novel Approach To High Voltage Substation Surveillance PDFmiamor$44No ratings yet
- Be Electronics and Telecommunication Semester 7 2023 May Mobile Communication System Rev 2019 C SchemeDocument1 pageBe Electronics and Telecommunication Semester 7 2023 May Mobile Communication System Rev 2019 C Schemetejasrabad20No ratings yet
- 3.physical Layer (Contd) - Data EncodingDocument6 pages3.physical Layer (Contd) - Data Encodingde veronNo ratings yet
- Unit 8 - Week 6 Lectures: Assignment 6Document4 pagesUnit 8 - Week 6 Lectures: Assignment 6rallabhandiSKNo ratings yet
- Comet Antenna Catalog EibradioDocument16 pagesComet Antenna Catalog EibradioThe SaintsNo ratings yet
- 8575 - Khyaal o Saans Urdu Book On Telepathy Bookspk PDFDocument114 pages8575 - Khyaal o Saans Urdu Book On Telepathy Bookspk PDFNature Wonder100% (1)
- Tektronix TDS 320 Two Channel OscilloscopeDocument200 pagesTektronix TDS 320 Two Channel OscilloscopeAudio TecnologiaNo ratings yet
- Design and Implementation of Microstrip Patch Antenna ArrayDocument4 pagesDesign and Implementation of Microstrip Patch Antenna ArrayPriscilaNo ratings yet
- SW200B CalDocument2 pagesSW200B Caljoseluise68100% (1)
- Ece Vi Antennas and Propagation (10ec64) NotesDocument110 pagesEce Vi Antennas and Propagation (10ec64) Notessaifz2012100% (3)
- Spotcure: Longwave DiathermyDocument1 pageSpotcure: Longwave DiathermyKartikPatilNo ratings yet
- Dynex+DX L37,42 10AXocecoDocument148 pagesDynex+DX L37,42 10AXocecomarcellobbNo ratings yet
- En 301 489-6 V2.1.0Document20 pagesEn 301 489-6 V2.1.0SosialNo ratings yet
- Sony WH1000XM4 PDFDocument1 pageSony WH1000XM4 PDFjohnNo ratings yet
- Wireless Networks For 4G/5G: Instructors: Sumit Roy and Tom Henderson TA: Collin BradyDocument15 pagesWireless Networks For 4G/5G: Instructors: Sumit Roy and Tom Henderson TA: Collin BradyalissonzkvNo ratings yet
- Brochure SIstema Anticolision CAS - BeckerDocument4 pagesBrochure SIstema Anticolision CAS - BeckerJOSE HUAMANINo ratings yet
- The Approach Chart Rules!: Terps ReviewDocument6 pagesThe Approach Chart Rules!: Terps Reviewyus yerNo ratings yet
- Distress Signal OnboardDocument15 pagesDistress Signal OnboardHasan Mahmud Bin SayedNo ratings yet
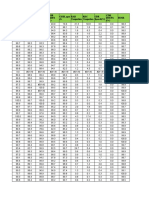
- Hosr Cell Availability CSSR Hsupa (%) CSSR R99 (%) CSSR Hsdpa (%) CSSR - Spee CH RAB Congestion RRC Congestion CDR Speech (%) CDR Hsupa (%)Document21 pagesHosr Cell Availability CSSR Hsupa (%) CSSR R99 (%) CSSR Hsdpa (%) CSSR - Spee CH RAB Congestion RRC Congestion CDR Speech (%) CDR Hsupa (%)alexanderNo ratings yet