You might also like
- You Wouldnt Want To Sail On A 19th-Century Whaling Ship 33 Grisly EnglishareDocument36 pagesYou Wouldnt Want To Sail On A 19th-Century Whaling Ship 33 Grisly EnglishareDušan MićovićNo ratings yet
- q2 Long Quiz 002 EntreDocument8 pagesq2 Long Quiz 002 EntreMonn Justine Sabido0% (1)
- Robotics & Robot ProgrammingDocument22 pagesRobotics & Robot ProgrammingDaniel OsineyeNo ratings yet
- Robotics Handouts-Part1 PDFDocument25 pagesRobotics Handouts-Part1 PDFCarmela FranchescaNo ratings yet
- STS When Technology and Humanity CrossDocument30 pagesSTS When Technology and Humanity CrossMelecio B. Dotarot Jr.No ratings yet
- Online Illuminati Brotherhood Registration Call On +27632807647 How To Join IlluminatiDocument5 pagesOnline Illuminati Brotherhood Registration Call On +27632807647 How To Join IlluminatinaseefNo ratings yet
- Robotics Social RobotDocument5 pagesRobotics Social RobotIJRASETPublicationsNo ratings yet
- Society 5.0 - A People-Centric Super-Smart - Hitachi-UTokyo LaboratoryDocument189 pagesSociety 5.0 - A People-Centric Super-Smart - Hitachi-UTokyo LaboratorymaeslorNo ratings yet
- Trends of RobotsDocument21 pagesTrends of RobotsPurba Mazumder100% (1)
- Robotics in Japan Local Global and Glocal Influences and ApplicationsDocument6 pagesRobotics in Japan Local Global and Glocal Influences and ApplicationsShivaranjini RamendranNo ratings yet
- Pioneering The Personal Robotics IndustryDocument14 pagesPioneering The Personal Robotics Industrygsivakumar44No ratings yet
- Investigatory Project 9Document16 pagesInvestigatory Project 9Johanna MaxyneNo ratings yet
- Humanoid RoboticsDocument5 pagesHumanoid Roboticsshreyas g kNo ratings yet
- Week 10Document24 pagesWeek 10Brainard Echaus ObañaNo ratings yet
- Design Space Survey On Social Robotics in The MarketDocument13 pagesDesign Space Survey On Social Robotics in The MarketmohammedNo ratings yet
- Docente Período Guia AÑO: Nivel O Asignatur A Estudiante Y GradoDocument4 pagesDocente Período Guia AÑO: Nivel O Asignatur A Estudiante Y Gradokaren celisNo ratings yet
- Robotics: Human-Like Arm Motion Generation: A ReviewDocument48 pagesRobotics: Human-Like Arm Motion Generation: A ReviewWolfram SmithNo ratings yet
- 1 Sts Module 7 WHATCDocument7 pages1 Sts Module 7 WHATCRose Vee PaynoNo ratings yet
- SEMI - Detailed-Plan-JaybonDocument8 pagesSEMI - Detailed-Plan-Jaybondanrish tagpisNo ratings yet
- STS Chapter 3 Lesson 4Document6 pagesSTS Chapter 3 Lesson 4Gino Dijeto Soles100% (1)
- When Technology and Humanity Cross - 2Document24 pagesWhen Technology and Humanity Cross - 2Clein Dave AmilingNo ratings yet
- Can Merging A Capability Approach With Effectual Processes Help Us Define A Permissible Action Range For Ai Robotics EntrepreneurshipDocument17 pagesCan Merging A Capability Approach With Effectual Processes Help Us Define A Permissible Action Range For Ai Robotics Entrepreneurshipintj2001712No ratings yet
- Makari, 2023Document9 pagesMakari, 2023alex2001aglNo ratings yet
- Concept Notes MIL and ActivityDocument22 pagesConcept Notes MIL and ActivityRegine C. BaldezamoNo ratings yet
- Humanoid RobotsDocument13 pagesHumanoid RobotsAyush PatelNo ratings yet
- IELTS Reading Practice Test 42 With Answers: Man or MachineDocument13 pagesIELTS Reading Practice Test 42 With Answers: Man or Machinebhiman bajarNo ratings yet
- When Technology and Humanity Cross PDFDocument10 pagesWhen Technology and Humanity Cross PDFPrincess PerezNo ratings yet
- Humanoid Robots Used For Surveillance: WWW - Final-Yearprojects - Co.ccDocument9 pagesHumanoid Robots Used For Surveillance: WWW - Final-Yearprojects - Co.ccChintu DemonNo ratings yet
- Visions of Artificial Intelligence and Robots in SDocument12 pagesVisions of Artificial Intelligence and Robots in Ssophiaccharlotte876No ratings yet
- Ergonomic Design in Interaction With RobotsDocument2 pagesErgonomic Design in Interaction With RobotsAlin MartinNo ratings yet
- Informatics Research Center FINALDocument8 pagesInformatics Research Center FINALErvin KamberoskiNo ratings yet
- Lesson 13 When Technology and Humanity CrossDocument27 pagesLesson 13 When Technology and Humanity CrossMARY JOY MARQUEZNo ratings yet
- Module9 STSDocument8 pagesModule9 STSJemalyn PiliNo ratings yet
- App InventorDocument2 pagesApp Inventormahidej823No ratings yet
- Republic of The Philippines Eulogio "Amang" Rodriguez Institute of Science and Technology Cavite Campus General Mariano Alvarez, CaviteDocument9 pagesRepublic of The Philippines Eulogio "Amang" Rodriguez Institute of Science and Technology Cavite Campus General Mariano Alvarez, Caviteluere_12No ratings yet
- Society 5.0: Hitachi-Utokyo Laboratory (H-Utokyo Lab.)Document188 pagesSociety 5.0: Hitachi-Utokyo Laboratory (H-Utokyo Lab.)Luthfi IYNo ratings yet
- Literature Review of Humanoid RobotDocument4 pagesLiterature Review of Humanoid Robotafdtsebxc100% (1)
- Humanoid Robots FinalDocument24 pagesHumanoid Robots FinalDipansha ChoudharyNo ratings yet
- Study of Human Consciousness Using AI Report (1) AKASHDocument22 pagesStudy of Human Consciousness Using AI Report (1) AKASHbenjoel1209No ratings yet
- Robots A Systematic Review of Literature On The Effects On Work and Workers Relation With Their Jobs and OrganizationsDocument24 pagesRobots A Systematic Review of Literature On The Effects On Work and Workers Relation With Their Jobs and OrganizationsTEE SOOK SING PBS172031No ratings yet
- The Power of A Hand-Shake in Human-Robot Interactions: October 2018Document7 pagesThe Power of A Hand-Shake in Human-Robot Interactions: October 2018Josh GonzalesNo ratings yet
- 6 INtroDocument2 pages6 INtroHimanshu GautamNo ratings yet
- A Brief Review of Recent Advancement inDocument6 pagesA Brief Review of Recent Advancement inSeymur ShukurzadeNo ratings yet
- Act. 7 - Scitech - L JDocument1 pageAct. 7 - Scitech - L JErica Julia IlaganNo ratings yet
- Extended Essays Samples For Students1 2Document283 pagesExtended Essays Samples For Students1 2LolNo ratings yet
- 305B Artificial Intellegence PDFDocument117 pages305B Artificial Intellegence PDFLohitha PottiNo ratings yet
- PDF PaperviiDocument10 pagesPDF PaperviiAnonymous tWYM4CHKuDNo ratings yet
- (6.2) Tech Hum Cross Part 2 Edt 9 (Module)Document2 pages(6.2) Tech Hum Cross Part 2 Edt 9 (Module)hazelNo ratings yet
- RoboticspaperDocument5 pagesRoboticspaperRamy MechlawiNo ratings yet
- Anticipating Our Future Robot Society. The Evaluation of Future Robot Applications From A User's PerspectiveDocument8 pagesAnticipating Our Future Robot Society. The Evaluation of Future Robot Applications From A User's PerspectiveChristyan Cruz UlloaNo ratings yet
- Artificial Intelligence and Machine Learning Applications in Smart Production: Progress, Trends and DirectionsDocument24 pagesArtificial Intelligence and Machine Learning Applications in Smart Production: Progress, Trends and DirectionsRifeNo ratings yet
- Proposal DDocument11 pagesProposal DsubhiiNo ratings yet
- Humanoid RobotsDocument25 pagesHumanoid RobotsRishabh SinghNo ratings yet
- A Survey On Practical Applications of Small Robots As Social RobotsDocument2 pagesA Survey On Practical Applications of Small Robots As Social RobotsAdamei AdamNo ratings yet
- News Industry 5.0: Humanoid Vs Journalist's Culture: Riris Loisa Ahmad Junaidi, Sinta ParamitaDocument7 pagesNews Industry 5.0: Humanoid Vs Journalist's Culture: Riris Loisa Ahmad Junaidi, Sinta ParamitaSagar RathodNo ratings yet
- 15 2017-4-2-pp.83-90Document8 pages15 2017-4-2-pp.83-90LusiNo ratings yet
- Contextualizing AI Education For K 12 Students To Enhance Their Learning of AI Literacy Through Culturally Responsive ApproachesDocument9 pagesContextualizing AI Education For K 12 Students To Enhance Their Learning of AI Literacy Through Culturally Responsive ApproachesPaUl CyRuS rOmAgOsNo ratings yet
- When Technology and Humanity Cross 3 PDFDocument10 pagesWhen Technology and Humanity Cross 3 PDFPrincess PerezNo ratings yet
- Toddlers Bond With RobotDocument5 pagesToddlers Bond With RobotMinh Nhat ThanNo ratings yet
- Technology in The 20th CenturyDocument9 pagesTechnology in The 20th CenturyVincent RumarateNo ratings yet
- RoboticsDocument23 pagesRoboticsapi-3167416490% (1)
- War As I Knew ItDocument2 pagesWar As I Knew ItShreyansNo ratings yet
- Blockchain Technology in The Banking SectorDocument2 pagesBlockchain Technology in The Banking Sectorvaralakshmi aNo ratings yet
- CH 2 How LAN and WAN Communications WorkDocument60 pagesCH 2 How LAN and WAN Communications WorkBeans GaldsNo ratings yet
- UntitledDocument6 pagesUntitledCoky IrcanNo ratings yet
- Cap. 1Document34 pagesCap. 1Paola Medina GarnicaNo ratings yet
- Tavera Vs Valdez 1 Phil 468Document2 pagesTavera Vs Valdez 1 Phil 468John AmbasNo ratings yet
- Important Terms in ObliconDocument4 pagesImportant Terms in ObliconAriana Cristelle L. Pagdanganan100% (1)
- Inductive Grammar Chart (Unit 2, Page 16)Document2 pagesInductive Grammar Chart (Unit 2, Page 16)Michael ZavalaNo ratings yet
- Mobilcut 102 Hoja TecnicaDocument2 pagesMobilcut 102 Hoja TecnicaCAGERIGONo ratings yet
- RA 9184 & RA 3019 NotesDocument5 pagesRA 9184 & RA 3019 Notesleng_evenNo ratings yet
- Exercise Guide - Broad Crested WeirDocument18 pagesExercise Guide - Broad Crested Weirvipul anandNo ratings yet
- Airport Demand ModelDocument26 pagesAirport Demand ModelbsvseyNo ratings yet
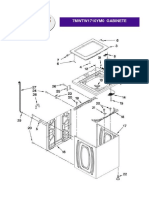
- 7MWTW1710YM0Document8 pages7MWTW1710YM0Izack-Dy JimZitNo ratings yet
- Course Syllabus: Ecommerce & Internet MarketingDocument23 pagesCourse Syllabus: Ecommerce & Internet MarketingMady RamosNo ratings yet
- Ex 6 Duo - 2021 Open-Macroeconomics Basic Concepts: Part 1: Multple ChoicesDocument6 pagesEx 6 Duo - 2021 Open-Macroeconomics Basic Concepts: Part 1: Multple ChoicesTuyền Lý Thị LamNo ratings yet
- DMP 2021 TPJ SRDocument275 pagesDMP 2021 TPJ SRishu sNo ratings yet
- Application Letters To Apply For A Job - OdtDocument2 pagesApplication Letters To Apply For A Job - OdtRita NourNo ratings yet
- Cyclical Iterative Design Process, Learning From ExperienceDocument7 pagesCyclical Iterative Design Process, Learning From ExperiencemartinsmitNo ratings yet
- Ibm v3700 Storeage PDFDocument694 pagesIbm v3700 Storeage PDFJanakackvNo ratings yet
- A Study On Impact of Smartphone AddictioDocument4 pagesA Study On Impact of Smartphone AddictiotansuoragotNo ratings yet
- Risk-Based IA Planning - Important ConsiderationsDocument14 pagesRisk-Based IA Planning - Important ConsiderationsRajitha LakmalNo ratings yet
- Group Tour Operators in Pune - Best Tours and Travels in PuneDocument10 pagesGroup Tour Operators in Pune - Best Tours and Travels in PuneGargi ToursNo ratings yet
- E14r50p01 800 MhaDocument4 pagesE14r50p01 800 Mha'Theodora GeorgianaNo ratings yet
- Year Warranty: 1575 - 90 Ave Edmonton, AB Canada T6P 0E2Document2 pagesYear Warranty: 1575 - 90 Ave Edmonton, AB Canada T6P 0E2juanchingarNo ratings yet
- Panch ShilDocument118 pagesPanch ShilSohel BangiNo ratings yet
- Non-Hazardous Areas Adjustable Pressure Switch: 6900P - Piston SensorDocument2 pagesNon-Hazardous Areas Adjustable Pressure Switch: 6900P - Piston SensorDiana ArredondoNo ratings yet
- RS485 ManualDocument7 pagesRS485 Manualndtruc100% (2)