You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 2000 Watts Induction Heater: InstructablesDocument16 pages2000 Watts Induction Heater: InstructablesPol IllaNo ratings yet
- Top 200 Embedded C Interview QuestionsDocument293 pagesTop 200 Embedded C Interview Questionsmahamd saiedNo ratings yet
- Toroidal Transformer Based Power AmplifierDocument10 pagesToroidal Transformer Based Power Amplifierrj_duffyNo ratings yet
- HVPD Kronos Spot Tester Training PresentationDocument49 pagesHVPD Kronos Spot Tester Training PresentationAndrie PrasetyoNo ratings yet
- Digital Signal Processing AssignmentDocument5 pagesDigital Signal Processing AssignmentM Faizan FarooqNo ratings yet
- CAPL BasicsDocument7 pagesCAPL Basicsmahamd saiedNo ratings yet
- Zte GSM Counters Kpis PDFDocument133 pagesZte GSM Counters Kpis PDF3a9a100% (1)
- Basic Computer Hardware Quiz Questions and AnswerDocument10 pagesBasic Computer Hardware Quiz Questions and AnswerminichelNo ratings yet
- Testing Solutions Through UML-SysML-Hause Stuart Submission INCOSE 20091Document15 pagesTesting Solutions Through UML-SysML-Hause Stuart Submission INCOSE 20091mahamd saiedNo ratings yet
- V&V - TestingDocument43 pagesV&V - Testingmahamd saiedNo ratings yet
- AL 2019 Sample Exam TA QuestionsDocument33 pagesAL 2019 Sample Exam TA Questionsmahamd saiedNo ratings yet
- Pointers, Stack & Heap Memory, MallocDocument4 pagesPointers, Stack & Heap Memory, Mallocmahamd saiedNo ratings yet
- Representing Memory-Mapped Devices As Objects: Dan Saks Saks & AssociatesDocument33 pagesRepresenting Memory-Mapped Devices As Objects: Dan Saks Saks & Associatesmahamd saiedNo ratings yet
- An330rev2 PDFDocument12 pagesAn330rev2 PDFmahamd saiedNo ratings yet
- Interrupt Latency, Stack Overflow, StackDocument1 pageInterrupt Latency, Stack Overflow, Stackmahamd saiedNo ratings yet
- SDLCDocument1 pageSDLCmahamd saiedNo ratings yet
- Calling Conventions in CDocument3 pagesCalling Conventions in Cmahamd saiedNo ratings yet
- 25 1 19Document6 pages25 1 19mahamd saiedNo ratings yet
- The Compiler, Assembler, Linker, LoaderDocument10 pagesThe Compiler, Assembler, Linker, Loadermahamd saiedNo ratings yet
- Tips of Embedded CDocument6 pagesTips of Embedded Cmahamd saiedNo ratings yet
- Complete Front End Solutions For Weigh Scales PDFDocument5 pagesComplete Front End Solutions For Weigh Scales PDFmahamd saiedNo ratings yet
- Some C Programming Language Tips - Doc (Repaired)Document11 pagesSome C Programming Language Tips - Doc (Repaired)mahamd saiedNo ratings yet
- C and C++ and Embedded C Questions: Default Values, Both Are Automotive ProtocolsDocument1 pageC and C++ and Embedded C Questions: Default Values, Both Are Automotive Protocolsmahamd saied100% (1)
- CUP Scheculing ExercisesDocument6 pagesCUP Scheculing Exercisesmahamd saiedNo ratings yet
- Embedded Systems Diploma 18Document3 pagesEmbedded Systems Diploma 18mahamd saiedNo ratings yet
- TL - 080Document12 pagesTL - 080Kenedi Lopez0% (1)
- Inter Vehicle Communication Seminar PresentationDocument41 pagesInter Vehicle Communication Seminar PresentationMahaManthra40% (5)
- ZX 72 330P 1500v1960-992-35.panDocument1 pageZX 72 330P 1500v1960-992-35.pansehrish23No ratings yet
- 10 Watt RF Power Amplifier For 2.4 GHZDocument17 pages10 Watt RF Power Amplifier For 2.4 GHZcasteloNo ratings yet
- I-V Characteristics of SCR, DIAC, TRIACDocument14 pagesI-V Characteristics of SCR, DIAC, TRIACShouvik MitraNo ratings yet
- Optocoupler CircuitsDocument13 pagesOptocoupler CircuitsDarNo ratings yet
- Verilog A Language: Adapted From (The Designer'S Guide To VERILOG-AMS, Kenneth S. Kundert)Document14 pagesVerilog A Language: Adapted From (The Designer'S Guide To VERILOG-AMS, Kenneth S. Kundert)Ahmed EdrisNo ratings yet
- Antennas and Wave PropagationDocument8 pagesAntennas and Wave Propagationpoojitha_chinniNo ratings yet
- The Physical I2C BusDocument13 pagesThe Physical I2C BusManoj KavediaNo ratings yet
- Ltcd/Erc Erzincan, Turkey: Konuk 1T Ezn 1TDocument18 pagesLtcd/Erc Erzincan, Turkey: Konuk 1T Ezn 1TYigit Omer CiftciNo ratings yet
- Epad04 tn187-1Document6 pagesEpad04 tn187-1Rachid MoussaouiNo ratings yet
- Reference GuideDocument46 pagesReference GuideChristian SindreuNo ratings yet
- Cxa-0217 Pcu-P027a Backlight Inverter TDK DatasheetDocument3 pagesCxa-0217 Pcu-P027a Backlight Inverter TDK DatasheetzikossNo ratings yet
- science-Quanser-magnetic-levitation-User ManualDocument18 pagesscience-Quanser-magnetic-levitation-User ManualDamithNo ratings yet
- Default Password List PDFDocument21 pagesDefault Password List PDFgopisaas0% (1)
- Mikrotik RB962UiGS 5HacT2HnT HAP Ac (7) 160301122418Document2 pagesMikrotik RB962UiGS 5HacT2HnT HAP Ac (7) 160301122418nivanetNo ratings yet
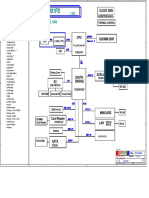
- Asus 1001PX N455 Rev1.2G SchematicDocument41 pagesAsus 1001PX N455 Rev1.2G SchematicCosti.HNo ratings yet
- Wouxun KG UV8D Menu DefinitionsDocument5 pagesWouxun KG UV8D Menu Definitionssoj1caNo ratings yet
- Roller 230 enDocument4 pagesRoller 230 enillemariusNo ratings yet
- Lecture 1423813120Document4 pagesLecture 1423813120Deepak SakkariNo ratings yet
- Winbond MonitorDocument45 pagesWinbond MonitorAlexNo ratings yet
- LX 2000 Sub Service ManualDocument12 pagesLX 2000 Sub Service ManualcesarlcaNo ratings yet
- Cisco 5400 Enterprise Network Compute System Hardware Installation GuideDocument54 pagesCisco 5400 Enterprise Network Compute System Hardware Installation GuideShady MohamedNo ratings yet
- Dynamic Scheduling Using Tomasulo's ApproachDocument4 pagesDynamic Scheduling Using Tomasulo's ApproachJiju_Joseph_1288No ratings yet