You might also like
- DAQ With PythonDocument31 pagesDAQ With Pythoncarlos andres rosero zambranoNo ratings yet
- Zuburtikudis 2020Document4 pagesZuburtikudis 2020carlos andres rosero zambranoNo ratings yet
- DETC2005-85477: Virtual Training Simulator For Atomic Force MicrosDocument8 pagesDETC2005-85477: Virtual Training Simulator For Atomic Force Microscarlos andres rosero zambranoNo ratings yet
- Global Perspectives of Nanoscience and Engineering EducationDocument399 pagesGlobal Perspectives of Nanoscience and Engineering Educationcarlos andres rosero zambrano100% (1)
- M - Sample Preparation For PFMDocument111 pagesM - Sample Preparation For PFMcarlos andres rosero zambranoNo ratings yet
- Home-Made Robotic EducationDocument5 pagesHome-Made Robotic Educationcarlos andres rosero zambranoNo ratings yet
- Dielectric Constant Measured by EFM (Comsol)Document6 pagesDielectric Constant Measured by EFM (Comsol)carlos andres rosero zambranoNo ratings yet
- COMSOL-Based Numerical Analysis of The Electric Field in PFM (Physics)Document8 pagesCOMSOL-Based Numerical Analysis of The Electric Field in PFM (Physics)carlos andres rosero zambranoNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- What Is OLAP? Cube, Operations & Types in Data WarehouseDocument7 pagesWhat Is OLAP? Cube, Operations & Types in Data WarehouseGabrielAlexandruNo ratings yet
- Scope of Work For FEED - Table of ContentsDocument5 pagesScope of Work For FEED - Table of ContentsFaizal Sattu100% (7)
- FC52Document5 pagesFC52Bassel AlmouieNo ratings yet
- GPSA 2nd Phase Tender For CUIS 2021-22Document1 pageGPSA 2nd Phase Tender For CUIS 2021-22Mwandembo Ushindi0% (1)
- Milk Production Trend - Dairy Development - Outlook PDFDocument10 pagesMilk Production Trend - Dairy Development - Outlook PDFrubel_nsuNo ratings yet
- Volkswagen 2010 Maintenance ScheduleDocument4 pagesVolkswagen 2010 Maintenance ScheduleWillNo ratings yet
- F-03 Self-cleaningFiltersManual & AutomaticAIRPELDocument4 pagesF-03 Self-cleaningFiltersManual & AutomaticAIRPELdevang asher100% (1)
- SosDocument6 pagesSosVikramNo ratings yet
- MAX232Document4 pagesMAX232janakiram473No ratings yet
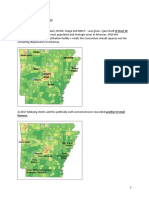
- Arkansas DispensariesDocument6 pagesArkansas DispensariesAdam ByrdNo ratings yet
- The Preserve Community NewsletterDocument4 pagesThe Preserve Community Newsletteralargent1949No ratings yet
- Readings in Philippine History-CeDocument11 pagesReadings in Philippine History-Cedeluna.jerremieNo ratings yet
- AL59 157 SQMM Transmission Line SpecificationDocument2 pagesAL59 157 SQMM Transmission Line SpecificationMohamed RafiNo ratings yet
- Doerrenberg Steel Foundry EnglishDocument16 pagesDoerrenberg Steel Foundry EnglishAditya PratapNo ratings yet
- Sample Size Determination and Confidence Interval Derivation For Exponential DistributionDocument6 pagesSample Size Determination and Confidence Interval Derivation For Exponential DistributionIsmael NeuNo ratings yet
- RoyalBritishBank V TurquanDocument3 pagesRoyalBritishBank V TurquanAlbukhari AliasNo ratings yet
- 12th Commerce Study Material English MediumDocument97 pages12th Commerce Study Material English MediumDeepak ajar100% (1)
- 731 Mitendra Pratap SinghDocument2 pages731 Mitendra Pratap Singhmitendra pratap singhNo ratings yet
- Edla English Unit 2019Document44 pagesEdla English Unit 2019api-506409356No ratings yet
- Mileage Rates - May 2022Document1 pageMileage Rates - May 2022episonNo ratings yet
- Irice VarietiesDocument28 pagesIrice VarietiesBlair TorioNo ratings yet
- Revealed Comparative AdvantageDocument5 pagesRevealed Comparative AdvantageiamrahulkumarNo ratings yet
- PTE Academic - Strategies For Summarize The Written TextDocument9 pagesPTE Academic - Strategies For Summarize The Written TextPradeep PaudelNo ratings yet
- Sustainable Transportation and Electric VehiclesDocument17 pagesSustainable Transportation and Electric Vehicless131744No ratings yet
- NewJaisa Corporate ProfileDocument14 pagesNewJaisa Corporate ProfileCRAZY ಕನ್ನಡಿಗNo ratings yet
- SDH PDFDocument370 pagesSDH PDFClaudia GafencuNo ratings yet
- Investigatory Project in Science ViDocument21 pagesInvestigatory Project in Science Vijasperrheyhuera100% (2)
- 01 AR PFMEA - TemplateDocument3 pages01 AR PFMEA - TemplateAndrew DoNo ratings yet
- Spotifyum V4 PDFDocument12 pagesSpotifyum V4 PDFBrzina1921No ratings yet