You might also like
- Computer System Planning FormDocument2 pagesComputer System Planning Formlastowl100% (3)
- TITANJET Service ManualDocument3 pagesTITANJET Service ManualHarold Montes100% (1)
- HL4A0/HL5A0 Logic Schematics: VER 1.0 October.8.2020Document130 pagesHL4A0/HL5A0 Logic Schematics: VER 1.0 October.8.2020Julio Alberto EspinozaNo ratings yet
- IRobot Scooba Service ManualDocument61 pagesIRobot Scooba Service Manualbiggertv0% (1)
- Cathedrale Notre-Dame de Paris, Papercraft PatternDocument9 pagesCathedrale Notre-Dame de Paris, Papercraft Patternduesen100% (3)
- DX-440 (Owner's Manual)Document28 pagesDX-440 (Owner's Manual)Benjamin DoverNo ratings yet
- Marauder CarnivalDocument11 pagesMarauder Carnivalbolopo2100% (1)
- Baseball AbbreviationsDocument5 pagesBaseball Abbreviationsshamrock3917No ratings yet
- Swiss Army Knife Scale RefinishingDocument14 pagesSwiss Army Knife Scale Refinishingd258759100% (1)
- Telecommunications Acronyms & Terms (With DOD Terms Also)Document52 pagesTelecommunications Acronyms & Terms (With DOD Terms Also)glenmacarthurNo ratings yet
- Tamagotchi Demon Slayer English ManualDocument3 pagesTamagotchi Demon Slayer English Manualduesen100% (2)
- Ge-Vivid-I-Bt11-Datasheet KopieDocument12 pagesGe-Vivid-I-Bt11-Datasheet KopieKarl KleinzachesNo ratings yet
- E210 CitizenDocument10 pagesE210 CitizenDavi Duarte da CunhaNo ratings yet
- Celestron Heavy Duty Wedge Mods PDFDocument5 pagesCelestron Heavy Duty Wedge Mods PDFfalmvenNo ratings yet
- The Slant Concept - TheshavenhookDocument36 pagesThe Slant Concept - TheshavenhooklestylobateNo ratings yet
- Celestar 8Document82 pagesCelestar 8aulogelio100% (1)
- Citizen Promaster Steel Watch Instruction Manual C720Document9 pagesCitizen Promaster Steel Watch Instruction Manual C720Viren TNo ratings yet
- Tongue Twisters 2Document10 pagesTongue Twisters 2Raghuveer ReddyNo ratings yet
- 3 Beverage Equipment and Service KnowledgeDocument15 pages3 Beverage Equipment and Service KnowledgeRoseller SasisNo ratings yet
- Acoustic Surveillance Device Comparative Assessment Report: BackgroundDocument8 pagesAcoustic Surveillance Device Comparative Assessment Report: BackgroundmultihumanNo ratings yet
- Roomba 600 ManualDocument32 pagesRoomba 600 ManualAnonymous vzsPCPDF6bNo ratings yet
- MTL Cti Metal Casting: by S K MondalDocument26 pagesMTL Cti Metal Casting: by S K MondalRahul VarshneyNo ratings yet
- Top Class BBQ Items & AccessoriesDocument3 pagesTop Class BBQ Items & AccessoriesBbq StoreNo ratings yet
- Brain Signal Amplifier For 6-Channel Eeg-Based Biofeedback HeadpieceDocument60 pagesBrain Signal Amplifier For 6-Channel Eeg-Based Biofeedback HeadpieceAnne Margaret AlmedaNo ratings yet
- Tech LinkDocument8 pagesTech LinkcherokewagNo ratings yet
- IP Services and Security Configuration GuideDocument658 pagesIP Services and Security Configuration Guideابرهيم منصورNo ratings yet
- How To Make Your Own Sugru SubstituteDocument21 pagesHow To Make Your Own Sugru Substituteleofiga100% (1)
- Boletin Técnico Cta PDF Julio 2001Document8 pagesBoletin Técnico Cta PDF Julio 2001Fabian Carrasco NaulaNo ratings yet
- Water Cannon 2015 Pressure WashersDocument32 pagesWater Cannon 2015 Pressure WashersCleaner MagazineNo ratings yet
- Loake Brochure 2014Document17 pagesLoake Brochure 2014martin9947No ratings yet
- An Inexpensive Circuit For Beta, Alpha, Theta, or Delta EEG BiofeedbackDocument4 pagesAn Inexpensive Circuit For Beta, Alpha, Theta, or Delta EEG BiofeedbackSilvano CardonaNo ratings yet
- Biofeedback Arduino BasedDocument9 pagesBiofeedback Arduino BasedMarkus DempfleNo ratings yet
- Manual Citizen Eco-Drive Titanium CA0024-55ADocument76 pagesManual Citizen Eco-Drive Titanium CA0024-55AAdrian IconomuNo ratings yet
- Beer Bottle Date DecodingDocument3 pagesBeer Bottle Date DecodingRoderick S FitzgeraldNo ratings yet
- Irobot Create Open Interface v2Document25 pagesIrobot Create Open Interface v2torsten_pf100% (1)
- Dr. Martens C&BDocument43 pagesDr. Martens C&BreynaldopanduwalNo ratings yet
- Karcher Pressure Washer Basic Troubleshooting Training 2005Document47 pagesKarcher Pressure Washer Basic Troubleshooting Training 2005t_zonne8557100% (1)
- Search Engines: Prepared By: Hannah Wynzelle T. AbanDocument30 pagesSearch Engines: Prepared By: Hannah Wynzelle T. AbanHannah Wynzelle AbanNo ratings yet
- PROTREK Catalog 2013Document8 pagesPROTREK Catalog 2013Mohd Fitri Che MatNo ratings yet
- PROTREK Catalog 2014Document10 pagesPROTREK Catalog 2014lucifer68No ratings yet
- Meta Search EnginesDocument48 pagesMeta Search EnginesSunita ChoudharyNo ratings yet
- A Stirling Engine ProjectDocument13 pagesA Stirling Engine Projectjoao victorNo ratings yet
- Darco Basic Knowledge About Shoe SizesDocument45 pagesDarco Basic Knowledge About Shoe SizesGreat GuyNo ratings yet
- Repair Guides - Transmission - Transaxle (2003) - Automatic Transmission 2 - AutoZoneDocument12 pagesRepair Guides - Transmission - Transaxle (2003) - Automatic Transmission 2 - AutoZonefranciscoNo ratings yet
- Stimplus Pro ManualDocument36 pagesStimplus Pro Manualfreimann100% (1)
- Florsheim CatalogDocument54 pagesFlorsheim Catalogperach15246No ratings yet
- Dorco Catalog PDFDocument17 pagesDorco Catalog PDFCristiand CZ100% (1)
- 10 Steps To Troubleshoot Wireless Connection ProblemsDocument12 pages10 Steps To Troubleshoot Wireless Connection Problemsyoucheff mochammadNo ratings yet
- Why Does A Polished Shoe Shine, The Physics Behind It.Document2 pagesWhy Does A Polished Shoe Shine, The Physics Behind It.Ganesh KumarNo ratings yet
- Ports Circuits and Tunnels Configuration GuideDocument608 pagesPorts Circuits and Tunnels Configuration Guidemazharul_iNo ratings yet
- General Construction & Assembly Techniques For Our Kits: Common PracticesDocument6 pagesGeneral Construction & Assembly Techniques For Our Kits: Common PracticesDavid M.No ratings yet
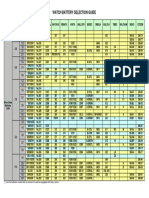
- Watch Battery Selection Guide: EnergizerDocument1 pageWatch Battery Selection Guide: EnergizerJbl IncNo ratings yet
- Air Handlers Service InstructionsDocument93 pagesAir Handlers Service InstructionsAnonymous uGPcnH0XppNo ratings yet
- Charging System Troubleshoot PDFDocument16 pagesCharging System Troubleshoot PDFmarcelo ustarezNo ratings yet
- Traffic Policer DocumentationDocument17 pagesTraffic Policer Documentationcsk275% (4)
- GBPPR Active Denial SystemDocument30 pagesGBPPR Active Denial SystemRobert EckardtNo ratings yet
- 2001 Nissan Exterra Service Manual TOCDocument6 pages2001 Nissan Exterra Service Manual TOCthemattgarrisonNo ratings yet
- Ultra-Cheap Peizo Pickup For Acoustic Guitar Joebrown - Org.ukDocument3 pagesUltra-Cheap Peizo Pickup For Acoustic Guitar Joebrown - Org.ukv30003vNo ratings yet
- X Terrra 2005Document296 pagesX Terrra 2005Israel M Rangel100% (1)
- Acquire, Repair and Sell Dysfunctional Electronics With Minimal Knowledge - InstructablesDocument9 pagesAcquire, Repair and Sell Dysfunctional Electronics With Minimal Knowledge - InstructablespolikarpaNo ratings yet
- Raptor RP1 Traffic Safety RadarDocument93 pagesRaptor RP1 Traffic Safety Radarad044No ratings yet
- Part # Description Quanity: Macro Equipment CompanyDocument27 pagesPart # Description Quanity: Macro Equipment CompanybobbyNo ratings yet
- Photography Through A Microscope PDFDocument22 pagesPhotography Through A Microscope PDFJose PerezNo ratings yet
- Choosing and Using a New CAT: Getting the Most from Your Schmidt Cassegrain or Any Catadioptric TelescopeFrom EverandChoosing and Using a New CAT: Getting the Most from Your Schmidt Cassegrain or Any Catadioptric TelescopeNo ratings yet
- Randomization: Preeti Punia 12ECP035 VLSI Design (3 Semester)Document38 pagesRandomization: Preeti Punia 12ECP035 VLSI Design (3 Semester)tushaartsawant100% (1)
- Connoisseur: Single Control Kitchen Faucet With Cast SpoutDocument1 pageConnoisseur: Single Control Kitchen Faucet With Cast SpoutduesenNo ratings yet
- Connoisseur: Single Control Kitchen Faucet Model NumberDocument2 pagesConnoisseur: Single Control Kitchen Faucet Model NumberduesenNo ratings yet
- Apple PowerBook Duo 250Document2 pagesApple PowerBook Duo 250duesenNo ratings yet
- Apple PowerBook Duo Dock, Duo Dock II and MiniDockDocument2 pagesApple PowerBook Duo Dock, Duo Dock II and MiniDockduesenNo ratings yet
- DOS Quick Reference CardDocument2 pagesDOS Quick Reference CardduesenNo ratings yet
- Apple Claris MacDraw ProDocument4 pagesApple Claris MacDraw ProduesenNo ratings yet
- Apple MacX 1.5 Brochure - Jun 1995Document2 pagesApple MacX 1.5 Brochure - Jun 1995duesenNo ratings yet
- AppleCD 300e and 300i SeriesDocument2 pagesAppleCD 300e and 300i SeriesduesenNo ratings yet
- Apple-1 Cassette InterfaceDocument7 pagesApple-1 Cassette InterfaceduesenNo ratings yet
- Commodore 1541 Maintenance Guide (1984)Document68 pagesCommodore 1541 Maintenance Guide (1984)duesenNo ratings yet
- Veritas Sharpening SystemDocument8 pagesVeritas Sharpening SystemduesenNo ratings yet
- Apple APW C Release NotesDocument33 pagesApple APW C Release NotesduesenNo ratings yet
- Apple Newton TapWorksDocument2 pagesApple Newton TapWorksduesenNo ratings yet
- Veritas Skew-Grinding JigDocument2 pagesVeritas Skew-Grinding JigduesenNo ratings yet
- Veritas MK II Narrow Blade Honing Guide C 01 eDocument11 pagesVeritas MK II Narrow Blade Honing Guide C 01 eduesenNo ratings yet
- The Origin of SpacewarDocument18 pagesThe Origin of SpacewarduesenNo ratings yet
- The American Magazine 1934 01 - The Saint - Paris Adventure, by Leslie CharterisDocument8 pagesThe American Magazine 1934 01 - The Saint - Paris Adventure, by Leslie CharterisduesenNo ratings yet
- Apple IIgs Demo SamplerDocument6 pagesApple IIgs Demo SamplerduesenNo ratings yet
- WPF Class Diagram PDFDocument1 pageWPF Class Diagram PDFduesenNo ratings yet
- Building A Blimp in 1/144 ScaleDocument4 pagesBuilding A Blimp in 1/144 ScaleduesenNo ratings yet
- Zeppelin in 1/72Document3 pagesZeppelin in 1/72duesenNo ratings yet
- Holter Contec TLC9803 User Manual - EnglishDocument53 pagesHolter Contec TLC9803 User Manual - EnglishEdward MoralesNo ratings yet
- Tuf h310m Plus Gaming Devices ReportDocument19 pagesTuf h310m Plus Gaming Devices ReportAlvaro Patricio Etcheverry TroncosoNo ratings yet
- MQXUSBDEVAPIDocument32 pagesMQXUSBDEVAPIwonderxNo ratings yet
- Impact LX49+ 61+ User Guide ENG 1.0Document28 pagesImpact LX49+ 61+ User Guide ENG 1.0ijwshepherdNo ratings yet
- Proceq DY-2 Sales Flyer English HighDocument4 pagesProceq DY-2 Sales Flyer English HighMS PMNo ratings yet
- Dell Supportassist Os Recovery: User'S GuideDocument25 pagesDell Supportassist Os Recovery: User'S GuideGlyn BartholomewNo ratings yet
- Compact H.264 Dvrs User'S Manual 8-Ch 4-Ch: ModelsDocument117 pagesCompact H.264 Dvrs User'S Manual 8-Ch 4-Ch: ModelsRodolfo CarruyoNo ratings yet
- BBOXX Product BrochureDocument52 pagesBBOXX Product Brochuremanojk_mNo ratings yet
- ISG Infrasys E380 SIGMA EliteDocument20 pagesISG Infrasys E380 SIGMA EliteForum PompieriiNo ratings yet
- Comptia A 220 901 Exam ObjectivesDocument19 pagesComptia A 220 901 Exam ObjectivesAlexander BuitronNo ratings yet
- Ken 19M - DDX - APP - FWupdate - enDocument1 pageKen 19M - DDX - APP - FWupdate - enORARI CiamisNo ratings yet
- Uno 3074 ADocument1 pageUno 3074 ASentaNo ratings yet
- Philips Tcm2.0e LaDocument86 pagesPhilips Tcm2.0e Layomismooo320% (1)
- Crouzet Dat Touchquickstart enDocument101 pagesCrouzet Dat Touchquickstart enelmer jpnsonNo ratings yet
- DX DiagDocument33 pagesDX DiagGrabiel UrdanetaNo ratings yet
- Port AddressDocument25 pagesPort AddressLaiba TahirNo ratings yet
- Suto S600 en 23-1 PDFDocument7 pagesSuto S600 en 23-1 PDFVikas PatidarNo ratings yet
- MT300 Three Channel Temperature Monitor: Quick Start GuideDocument5 pagesMT300 Three Channel Temperature Monitor: Quick Start Guidemojsic6313No ratings yet
- B360M DS3H Motherboard ManualDocument43 pagesB360M DS3H Motherboard ManualKaki MatyiNo ratings yet
- Kontron MAN-CP307Document138 pagesKontron MAN-CP307SarzaminKhanNo ratings yet
- 43pus7555 12 Dfu EngDocument63 pages43pus7555 12 Dfu EngDave HoltNo ratings yet
- Catalog Bien Tan Mitsubishi FR E700 InverterDocument104 pagesCatalog Bien Tan Mitsubishi FR E700 InverterGiang BùiNo ratings yet
- H.264 4/8/16-Channel DVR User Manual: Products: BLK-DH200400DH, BLK-DH200800DH, BLK-DH201600DHDocument110 pagesH.264 4/8/16-Channel DVR User Manual: Products: BLK-DH200400DH, BLK-DH200800DH, BLK-DH201600DHEdriezz Sa LoNo ratings yet
- VESTELDocument26 pagesVESTELsalah.eldinNo ratings yet
- Computer Products MAY13Document130 pagesComputer Products MAY13kleos70No ratings yet
- Laserjet Pro m101-m106 m129 m134 Troubleshooting Manual PDFDocument262 pagesLaserjet Pro m101-m106 m129 m134 Troubleshooting Manual PDFnelque402No ratings yet