You might also like
- NASA Supercritical AirfoilsDocument76 pagesNASA Supercritical AirfoilsDhruv Shihora100% (1)
- Drone SwarmsDocument5 pagesDrone SwarmsMandeep Singh100% (1)
- Hipaa Information and Consent FormDocument1 pageHipaa Information and Consent FormJake HennemanNo ratings yet
- Micro Air Vehicles - Toward A New Dimension in FlightDocument9 pagesMicro Air Vehicles - Toward A New Dimension in FlightEric Cheung0% (1)
- Main Crash Course-eBook - Aerospace EngineeringDocument194 pagesMain Crash Course-eBook - Aerospace EngineeringSudarshan Dhakal100% (1)
- Temporary Revision Number 4Document1 pageTemporary Revision Number 4josephNo ratings yet
- Simulation and Intelligence System of Bio-Inspired Terrestrial RobotDocument6 pagesSimulation and Intelligence System of Bio-Inspired Terrestrial RobotInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Artificial Intelligence Technologies For Robot Assisted Urban Search and RescueDocument16 pagesArtificial Intelligence Technologies For Robot Assisted Urban Search and RescueRonald BarciaNo ratings yet
- Ultra Wideband Radar For Micro Air Vehicle ApplicationsDocument5 pagesUltra Wideband Radar For Micro Air Vehicle Applicationsgogu1988reddy100% (1)
- Convoy ProtectionDocument10 pagesConvoy ProtectionUAVs Australia100% (1)
- Embedded System and Matlab SIMULINK PDFDocument31 pagesEmbedded System and Matlab SIMULINK PDFclaudiunicolaNo ratings yet
- Data Science With Python - Lesson 01 - Data Science OverviewDocument35 pagesData Science With Python - Lesson 01 - Data Science OverviewSwarnajyoti Mazumdar100% (2)
- United States Military Space Systems - The Road AheadDocument29 pagesUnited States Military Space Systems - The Road Aheadajsingh648877No ratings yet
- Micro Air Vehicles: Y.Sudheer, G.Naganna, Email: Mobile No: 9700508696 Mobile No: 7893156002Document10 pagesMicro Air Vehicles: Y.Sudheer, G.Naganna, Email: Mobile No: 9700508696 Mobile No: 7893156002Srini VasuluNo ratings yet
- 1 s2.0 S1000936120302466 MainDocument17 pages1 s2.0 S1000936120302466 MainLuiz Henrique SchaffazickNo ratings yet
- Chapter-1 Introduction of Micro Air VehiclesDocument28 pagesChapter-1 Introduction of Micro Air VehiclesRockey RoockNo ratings yet
- Microciencia y Su Relación Con Los DronesDocument7 pagesMicrociencia y Su Relación Con Los DronesJuan camilo Vargas perdonoNo ratings yet
- A Survey On Swarming With Micro Air Vehicles: Fundamental Challenges and ConstraintsDocument26 pagesA Survey On Swarming With Micro Air Vehicles: Fundamental Challenges and ConstraintsHoàng MạnhNo ratings yet
- Flapping Flight For Biomimetic Robotic Insects: Part I-System ModelingDocument13 pagesFlapping Flight For Biomimetic Robotic Insects: Part I-System ModelingPhạm Quốc BảoNo ratings yet
- Bristol MAV Ornithopter PaperDocument0 pagesBristol MAV Ornithopter PaperNurfarina HusseinNo ratings yet
- Valavanis Vachtsevanos2015 ReferenceWorkEntry MAVsAndBio InspiredUAVsIntroduDocument3 pagesValavanis Vachtsevanos2015 ReferenceWorkEntry MAVsAndBio InspiredUAVsIntroduNourhan FathyNo ratings yet
- 1 s2.0 S1000936116300978 MainDocument19 pages1 s2.0 S1000936116300978 MainSHARONNo ratings yet
- Evolution of Robotic Arms: Michael E. MoranDocument9 pagesEvolution of Robotic Arms: Michael E. MoranJuan Miguel Garatejo VasquezNo ratings yet
- Design of A Proportional-Integral Controller To Track Pitch Angle in A Mini Aerial VehicleDocument10 pagesDesign of A Proportional-Integral Controller To Track Pitch Angle in A Mini Aerial Vehicleأبو هشامNo ratings yet
- Unmanned Areial VehicalDocument8 pagesUnmanned Areial VehicalhosainsharonyNo ratings yet
- The Entomopter: January 2002Document29 pagesThe Entomopter: January 2002Varun Karthikeyan ShettyNo ratings yet
- 81-Designing A System For Mobile Manipulation FromDocument6 pages81-Designing A System For Mobile Manipulation FromHaider AliNo ratings yet
- COUNTER DRONE SWARMS - LT Col AJ (Sep 2020)Document12 pagesCOUNTER DRONE SWARMS - LT Col AJ (Sep 2020)MOHIT YADAVNo ratings yet
- Numerical Study Flow MAV atlowRE IntJou MAVDocument12 pagesNumerical Study Flow MAV atlowRE IntJou MAVKarthikeya SrivathsavNo ratings yet
- Bibliometric review-MAVs IntJou MAVDocument20 pagesBibliometric review-MAVs IntJou MAVKarthikeya SrivathsavNo ratings yet
- Unmanned Aerial VehiclesDocument14 pagesUnmanned Aerial Vehiclesuzair khanzadaNo ratings yet
- The U.S. Navy Plans To Foil Massive Super: Editors' PickDocument4 pagesThe U.S. Navy Plans To Foil Massive Super: Editors' Pick高敏No ratings yet
- 1 s2.0 S1877050913005140 MainDocument10 pages1 s2.0 S1877050913005140 MainAfework BezieNo ratings yet
- The Three-Dimensional Flow Simulation of A Flapping WingDocument12 pagesThe Three-Dimensional Flow Simulation of A Flapping Wingchandra sekharNo ratings yet
- Scirobotics Aaw9710Document15 pagesScirobotics Aaw9710idchert9696No ratings yet
- Modal Analysis and Improvement of Lightweight Wings For Micro Air Vehicle (MAV) ApplicationsDocument10 pagesModal Analysis and Improvement of Lightweight Wings For Micro Air Vehicle (MAV) ApplicationsMostafa KhalilNo ratings yet
- Parameters For Classification of A Mini UAV.Document22 pagesParameters For Classification of A Mini UAV.rajesh2709No ratings yet
- IJETR022997Document7 pagesIJETR022997erpublicationNo ratings yet
- The First Takeoff of A Biologically Inspired At-Scale Robotic InsectDocument7 pagesThe First Takeoff of A Biologically Inspired At-Scale Robotic InsectAnonymous 19dLe9duNo ratings yet
- 57 - JMST 2017 023 R2inpressDocument13 pages57 - JMST 2017 023 R2inpresssachi whiteNo ratings yet
- 57 - JMST 2017 023 R2inpressDocument13 pages57 - JMST 2017 023 R2inpresssachi whiteNo ratings yet
- Designing Zoning of Remote Sensing Drones For Urban Applications: A ReviewDocument8 pagesDesigning Zoning of Remote Sensing Drones For Urban Applications: A ReviewAusa RamadhanNo ratings yet
- "Design & Development Analysis of Quadcopter": Parag Parihar, Priyanshu Bhawsar, Piyush HargodDocument6 pages"Design & Development Analysis of Quadcopter": Parag Parihar, Priyanshu Bhawsar, Piyush HargodAnonymous e7Rajar9SwNo ratings yet
- Yoon 2016Document11 pagesYoon 2016vishal BhoknalNo ratings yet
- 1440 Withrow 101220Document19 pages1440 Withrow 101220Windhi AerospaceNo ratings yet
- Unmanned Aerial Vehicles As Tools For FoDocument11 pagesUnmanned Aerial Vehicles As Tools For FoMohammadUzairNo ratings yet
- Uav Q&ans-2-54Document53 pagesUav Q&ans-2-54THE BOISNo ratings yet
- Small Unmanned Aircraft: Theory and PracticeFrom EverandSmall Unmanned Aircraft: Theory and PracticeRating: 4.5 out of 5 stars4.5/5 (2)
- Biomimetics 07 00207Document17 pagesBiomimetics 07 00207MIGUEL ANGEL VICENTE CANAVIRINo ratings yet
- Sensors 21 05293Document14 pagesSensors 21 05293MIGUEL ANGEL VICENTE CANAVIRINo ratings yet
- FYP OrnithopterDocument22 pagesFYP OrnithopterFaisal Saleh RazaNo ratings yet
- Rina Warship 2018 Aitken MCM Paper PDFDocument11 pagesRina Warship 2018 Aitken MCM Paper PDFjorj chirilaNo ratings yet
- Rescue Fly An EssentialDocument5 pagesRescue Fly An EssentialInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Introduction To Computational Fluid Dynamics: December 2010Document15 pagesIntroduction To Computational Fluid Dynamics: December 2010kishorebabubhumulaNo ratings yet
- Drones: Biomimetic Drones Inspired by Dragonflies Will Require A Systems Based Approach and Insights From BiologyDocument24 pagesDrones: Biomimetic Drones Inspired by Dragonflies Will Require A Systems Based Approach and Insights From BiologyRithik KumarNo ratings yet
- Progress, Challenges, and Prospects of Soft Robotics For Space ApplicationsDocument25 pagesProgress, Challenges, and Prospects of Soft Robotics For Space ApplicationscantbelieveimdoingthisforagameNo ratings yet
- Icmiee Pi 160138Document6 pagesIcmiee Pi 160138Rohit PoddarNo ratings yet
- 008 NanotechnologyDocument10 pages008 NanotechnologypinkysushuNo ratings yet
- The Multi-Mission Earth Entry Vehicle For Sample Return Missions - Past, Present, and Future Corliss, J.M., Kellas, S.R., Maddock, R.W.Document12 pagesThe Multi-Mission Earth Entry Vehicle For Sample Return Missions - Past, Present, and Future Corliss, J.M., Kellas, S.R., Maddock, R.W.pacoNo ratings yet
- Flexible Wing Based Micro Air VehiclesDocument13 pagesFlexible Wing Based Micro Air VehiclesArun NairNo ratings yet
- Autonomous Systems: David P. Watson and David H. ScheidtDocument9 pagesAutonomous Systems: David P. Watson and David H. ScheidtJimmy Alfaro HernandezNo ratings yet
- Advanced Helicopter DesignDocument19 pagesAdvanced Helicopter DesignshaliniNo ratings yet
- Data Science With Python - Lesson 10 - Data Visualization in Python With Matplotlib - RawDocument71 pagesData Science With Python - Lesson 10 - Data Visualization in Python With Matplotlib - RawSachinNo ratings yet
- Data Science With Python - Lesson 07 - Data Manipulation With Python - PandasDocument72 pagesData Science With Python - Lesson 07 - Data Manipulation With Python - PandasSachinNo ratings yet
- B.Tech. Batch AE-10: I-04, RIICO Industrial Area, Neemrana, Dist. Alwar, RajasthanDocument17 pagesB.Tech. Batch AE-10: I-04, RIICO Industrial Area, Neemrana, Dist. Alwar, RajasthanSachinNo ratings yet
- RTU) - Entry ID 611Document4 pagesRTU) - Entry ID 611SachinNo ratings yet
- 12-04-2015-09-36-48-47962-Digital TechniquesDocument12 pages12-04-2015-09-36-48-47962-Digital TechniquesSachinNo ratings yet
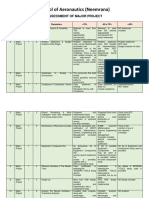
- School of Aeronautics (Neemrana) : Assessment of Major ProjectDocument4 pagesSchool of Aeronautics (Neemrana) : Assessment of Major ProjectSachinNo ratings yet
- Zgyhlk 1501575349050305Document1 pageZgyhlk 1501575349050305SachinNo ratings yet
- 2 - Sem.-II, IV, VI & VIII - Online Revision Classes Schedule For Doubt Resolution PDFDocument11 pages2 - Sem.-II, IV, VI & VIII - Online Revision Classes Schedule For Doubt Resolution PDFSachinNo ratings yet
- 12 Dec 2019 (Engineering Matchematics-1)Document2 pages12 Dec 2019 (Engineering Matchematics-1)SachinNo ratings yet
- The Spiritual Path - Swami Yatiswarananda PDFDocument12 pagesThe Spiritual Path - Swami Yatiswarananda PDFSachinNo ratings yet
- 11 Dec 2019 (Advance Engineering Matchematics)Document2 pages11 Dec 2019 (Advance Engineering Matchematics)SachinNo ratings yet
- P RT: ADocument8 pagesP RT: ASachinNo ratings yet
- School of Aeronautics (Neemrana) : Laxmi Narain Verma Memorial Society Group of InstitutesDocument1 pageSchool of Aeronautics (Neemrana) : Laxmi Narain Verma Memorial Society Group of InstitutesSachinNo ratings yet
- ,iii'ri, Q"it: (Main/Back) Exam' Jan' Engineering Common To AllDocument4 pages,iii'ri, Q"it: (Main/Back) Exam' Jan' Engineering Common To AllSachinNo ratings yet
- Project and Internship Presentation Schedule For Semester VII StudentsDocument3 pagesProject and Internship Presentation Schedule For Semester VII StudentsSachinNo ratings yet
- Minhash PDFDocument2 pagesMinhash PDFYiboNo ratings yet
- Air Compressor Daisy Chain Termination - Rev 0Document1 pageAir Compressor Daisy Chain Termination - Rev 0mounrNo ratings yet
- Full Multisim 14 PDFDocument365 pagesFull Multisim 14 PDFHafiz PGNo ratings yet
- Scrum: Question & AnswersDocument7 pagesScrum: Question & AnswersSuraj ShresthaNo ratings yet
- Pune Institute of Computer Technology PUNE - 411043 Department of Electronics & TelecommunicationDocument12 pagesPune Institute of Computer Technology PUNE - 411043 Department of Electronics & TelecommunicationNakul SharmaNo ratings yet
- Bharat Heavy Elelctricals Limited: Operation & Maintenance Manual of Bhelscan Flame Scanner System (Bn10)Document25 pagesBharat Heavy Elelctricals Limited: Operation & Maintenance Manual of Bhelscan Flame Scanner System (Bn10)MukeshKrNo ratings yet
- Active Versus Passive DevicesDocument6 pagesActive Versus Passive DevicesSneha BandhaviNo ratings yet
- IELTS Technology VocabularyDocument4 pagesIELTS Technology Vocabularymanju sisodiyaNo ratings yet
- Computer Lab Rules and RegulationsDocument5 pagesComputer Lab Rules and RegulationsArvin Barrientos BernestoNo ratings yet
- HTTPS: - WWW - Whois.com - Whois - Tech-Al - InfoDocument4 pagesHTTPS: - WWW - Whois.com - Whois - Tech-Al - InfoΛουκάςNo ratings yet
- AVR: Which Microcontroller To Choose: PIC VsDocument17 pagesAVR: Which Microcontroller To Choose: PIC VsMuhammad Zawar100% (1)
- Cppsim Primer3Document61 pagesCppsim Primer3jit20088791No ratings yet
- Covenant UniversityDocument5 pagesCovenant UniversityWilkie MofeNo ratings yet
- Pharmaceutical Distribution Management System - ERDiagramDocument1 pagePharmaceutical Distribution Management System - ERDiagram1000 ProjectsNo ratings yet
- Zero Data Loss Recovery Appliance: Administrator's Guide Release 12.1Document322 pagesZero Data Loss Recovery Appliance: Administrator's Guide Release 12.1enrico rampazzoNo ratings yet
- A New Method For Encryption Using Fuzzy Set TheoryDocument7 pagesA New Method For Encryption Using Fuzzy Set TheoryAgus S'toNo ratings yet
- Econstruct Issue 2Document40 pagesEconstruct Issue 2ArNushiMahfodzNo ratings yet
- Practical-8: Write A Mobile Application That Creates Alarm ClockDocument7 pagesPractical-8: Write A Mobile Application That Creates Alarm Clockjhyter54rdNo ratings yet
- Different Approaches To Crack Monitoring of Buildings Using IOTDocument11 pagesDifferent Approaches To Crack Monitoring of Buildings Using IOTIJRASETPublicationsNo ratings yet
- Cyber ArkDocument2 pagesCyber ArkHendra SoenderskovNo ratings yet
- Me2 Installation Guide PDFDocument4 pagesMe2 Installation Guide PDFJojo LeaonNo ratings yet
- Elb AgDocument117 pagesElb AgniravNo ratings yet
- Design of PLC Based Automatic Flat Bottle Label Adjuster: Olorunda, P. A. and Adetunde, I. ADocument5 pagesDesign of PLC Based Automatic Flat Bottle Label Adjuster: Olorunda, P. A. and Adetunde, I. AManiNo ratings yet
- ETSI TS 138 215: 5G NR Physical Layer Measurements (3GPP TS 38.215 Version 17.3.0 Release 17)Document33 pagesETSI TS 138 215: 5G NR Physical Layer Measurements (3GPP TS 38.215 Version 17.3.0 Release 17)rkaul2763No ratings yet
- Ebook PDF Using Sage 300 Erp 2017 by Chris Heaney PDFDocument41 pagesEbook PDF Using Sage 300 Erp 2017 by Chris Heaney PDFmartha.keener953100% (39)
- Service Manual: DSC-F77/FX77Document2 pagesService Manual: DSC-F77/FX77tm5u2rNo ratings yet